一種基于幾何不變特征區(qū)域的數(shù)字水印算法
2011-09-27 12:32:02李克秋*,莊庶,張永
大連理工大學學報 2011年2期
李 克 秋*, 莊 庶, 張 永
(大連理工大學 計算機科學與技術學院,遼寧 大連 116024)
0 引 言
抗幾何攻擊是數(shù)字水印技術需解決的一個重要問題,也是一個難點.數(shù)字水印技術如今已有巨大的發(fā)展,產(chǎn)生了各種“穩(wěn)健性”的算法[1].
目前穩(wěn)健水印的主要應用包括解決版權爭議、設置用戶標識、進行數(shù)據(jù)管理和跟蹤等.最初的水印技術直接修改數(shù)字媒體的空域采樣值,后來發(fā)展到變換域水印.變換域水印包括傅里葉變換(DFT)域或者更為復雜的傅里葉-梅林域、若當-維格納域等,還有離散余弦變換(DCT)域、小波變換(DWT)域等.雖然上面所述的算法在圖像水印技術的研究中有了很大進展,但是抵抗幾何攻擊方面仍是面臨的最大的問題.對于給定的水印算法,水印檢測器必須知道水印嵌入的確切位置.由于變換域不具有幾何不變特征,幾何失真后,原有位置系數(shù)的值都將產(chǎn)生較大的變化.盡管水印分量從一定意義上講,仍然可能存在于數(shù)字媒體中,但各分量的存在位置已經(jīng)與嵌入時完全不同.幾何攻擊并沒有破壞圖像水印,而是破壞了待檢測水印圖像與嵌入水印信息之間的同步.目前有很多種抗幾何攻擊的數(shù)字水印算法,其中基于特征的水印算法在圖像經(jīng)過幾何攻擊,以及壓縮、加噪、濾波等常見的信號處理后仍然能夠提取水印信息,所以得到了廣泛的應用.目前提取特征點、角點的方法有很多種,大致可以分為基于輪廓的方法、基于亮度的方法和基于參數(shù)模型的方法[2~5].利用特征點作為圖像的同步信息嵌入水印能抵抗一定程度的幾何攻擊[6],但是基于特征點的水印嵌入還存在很多問題[7~10],主要是特征點過多,穩(wěn)定性不夠好,分布不均勻,對旋轉(zhuǎn)后的圖像還不能有效提取.而且依靠特征點所提取的特征區(qū)域,在縮放、縱橫比改變等幾何攻擊下,易產(chǎn)生變形,不能很好地提取水印信息.
針對上述問題,本文以 Harris-Laplacian算法[11]提取特征點為基礎,提出一種可以有效抗幾何攻擊的算法.
1 特征點和幾何不變特征區(qū)域提取
1.1 特征點
定義1圖像特征點:是指在圖像中具有一定特性,且比較穩(wěn)健的角點.
這些點在圖像受到幾何攻擊時,仍然能夠很好地從圖像中提取出來,而且重復率高.本文按照下面的方法提取特征點.首先利用尺度空間理論建立Harris角點的尺度空間表示[12],如式(1)所示.
式中:Lx(x,y,s)、Ly(x,y,s)表示在x、y方向的梯度;G(x,y,珋s)表示高斯核;s=0.7珋s,珋s=si,表示第i層參數(shù);*表示卷積.算出其矩陣的跡(tr)和行列式(det),代入下面的公式:

E稱作特征強度.其中k為常數(shù),通常取值為0.04.當E大于給定的閾值T時(在這里取的閾值比較大,以保證特征點的高重復率,本文中T為18 000),那么該點就作為候選特征點.
然后利用Laplacian算子迭代算法檢測每個尺度下的候選特征點是否能達到Laplacian極值.如果達到極值就可作為多尺度上的特征點.
其中Laplacian算子定義如下:

1.2 特征方向
定義2特征方向:是指依靠特征點計算出的方向,這個方向在圖像旋轉(zhuǎn)后,仍然能夠保證它相對于特征區(qū)域保持不變.
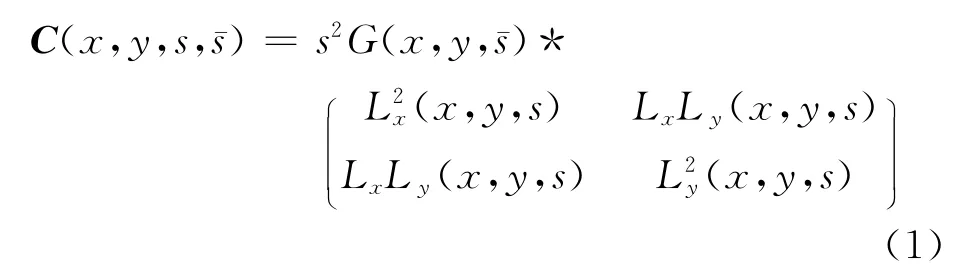
特征方向的選取,應對旋轉(zhuǎn)具有不變性,本文對特征方向的選取如下:在特征點(x,y)選取一個半徑R的鄰域區(qū)域,沿梯度方向取灰度值為極值的點(如果沿梯度方向的灰度值變小,那么取最小值;反之,取最大值),然后半徑加1,再取梯度方向的極植點.圖1為依照本文算法提取的一個特征點鄰域的灰度值矩陣,中心表示特征點所在的位置,沿著梯度方向,在每個方塊中分別取灰度值的極值點(每個方塊中的最小值),如果在一個方塊中有相同的極值點,那么取它們的位置平均值.本文以半徑為4,取了4個點.之所以選擇這樣的點作為特征方向的運算,主要是因為它們受到濾波等信號處理,以及幾何攻擊后,仍然能夠保持相對于特征點的位置不變.然后根據(jù)它們距特征點的距離

求得

那么特征方向角

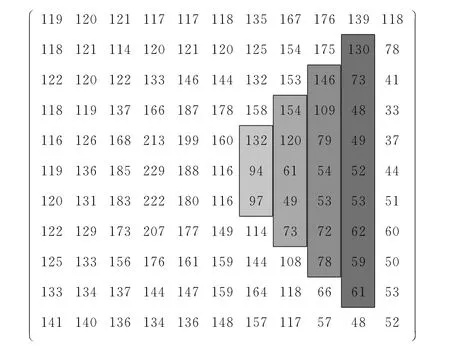
圖1 特征點鄰域的灰度值矩陣Fig.1 Matrix of gray value in feature point neighborhood
定理1特征方向的選取具有旋轉(zhuǎn)的不變性.
這個算法保證特征角能夠應對旋轉(zhuǎn)的不變性,證明如下.
證明 圖像是以其中心為軸心旋轉(zhuǎn)的,但是由于特征方向是相對于特征點的,也就是說特征區(qū)域的旋轉(zhuǎn)還是以特征點為中心.所以可以把特征點作為坐標原點.
如圖2所示,旋轉(zhuǎn)前的特征點示意圖中,(0,0)坐標表示圖像中任取的一個特征點,(xi,yi)表示在半徑為R圓中滿足條件的任意一點,θi表示(xi,yi)對應的角度,假設在特征點處的特征方向角為θ,它的正切值tanθ=珔y/珚x.圖像旋轉(zhuǎn)α后(如圖3所示),它的特征角應為θ+α.如果能夠證明那么所要證明的結論就成立.
圖2 旋轉(zhuǎn)前的特征點示意圖Fig.2 The feature point before rotation
由定義可知
那么,可得
利用特征方向?qū)πD(zhuǎn)不變的性質(zhì)來提取特征區(qū)域,可使這個區(qū)域在圖像旋轉(zhuǎn)的情況下,仍然能夠有效地被提取.
1.3 根據(jù)特征點和特征方向選取幾何不變特征區(qū)域
定義3幾何不變特征區(qū)域:以特征點為中心建立起來的長方形區(qū)域.
這個區(qū)域在旋轉(zhuǎn)、縮放、平移等幾何攻擊下,仍然能夠保持它的不變性.在后面將其簡稱為特征區(qū)域.因此通過幾何不變特征區(qū)域嵌入和提取水印的算法能夠有效地抵抗幾何攻擊.本文利用特征點和特征方向選取幾何不變特征區(qū)域的具體算法如下:
首先對選出的特征點集P={pi|pi為特征點,i=1,2,…,n},按特征強度的大小,從大到小進行排序.然后以特征點為中心,取長方形的特征區(qū)域的對角線長度為
k為常數(shù),a與b分別為圖像的長和寬.特征方向為垂直于長方形特征區(qū)域高的中點連線的方向.當選取的特征區(qū)域發(fā)生重疊時,刪除特征強度相對較小的特征點所對應的特征區(qū)域.
這樣選取的區(qū)域能夠有效抵抗圖像長寬不同比率變化以及其他方式的幾何攻擊引起的特征區(qū)域的變形.
2 數(shù)字水印的嵌入
本文采用對特征區(qū)域的載體圖像進行8×8塊的離散余弦變換(DCT),然后將二值水印信息嵌入DCT的中頻系數(shù)中,步驟如下.
(1)特征點提取:利用本文所提供的算法從原始圖像中提取出特征點集.
(2)選取特征區(qū)域:根據(jù)上面的特征點集選取特征區(qū)域,如果兩個特征區(qū)域重疊,那么保留特征強度比較大的特征點所對應的特征區(qū)域.
(3)水印產(chǎn)生:隨機序列W= {w1,w2,…,wn}.其中wi為0或1.
(4)水印信息的嵌入:選取一個特征區(qū)域,如圖4所示,再對圖4進行8×8塊的離散余弦變換,產(chǎn)生如圖5所示的圖像.
圖4 從原始圖像中提取的特征區(qū)域Fig.4 The feature area extracted from the original image
圖5 圖4的DCTFig.5 DCT for Fig.4
假設在該區(qū)域內(nèi)圖像被分割為互不覆蓋的i個非0圖像塊fi(x,y),其中0≤x,y<8,i=1,2,…,經(jīng)過離散余弦變換后為非0的Fi(u,v),0≤u,v<8,i=1,2,…,F(xiàn)i(u,v)= {x1,x2,…,xn}是一個在頻域空間的二維數(shù)組.去掉最外一圈非0的塊,這樣保證了水印信息能嵌入特征區(qū)域內(nèi).對Fi(u,v)內(nèi)的元素進行排序,在水印W={w1,w2,…,wn}順序取m個水印信息,對Fi(u,v)序列中第l+1到l+m的中頻系數(shù)部分的值進行修改.
之所以選擇這種方式,是由于對于頻域特性來說,如果將圖像從空域變換到頻域,那么頻率越高,人眼的分辨能力就越低;反之,頻率越低,人眼的分辨能力就越高.但是,各種圖像處理操作對于圖像高頻部分的損壞可能很大,如有損壓縮、低通濾波等.水印很容易在經(jīng)歷圖像處理的過程中損失,穩(wěn)健性較差.如果要獲得很好的穩(wěn)健性,數(shù)字水印應加在低頻部分,但是這樣引起的圖像降質(zhì)較大,無法保證視覺透明性.
因此,為了避開這一矛盾,應在視覺透明性和穩(wěn)健性之間進行折中.根據(jù)上面的分析,在本文中數(shù)字水印的嵌入選在圖像的中頻部分,用水印序列對中頻系數(shù)進行調(diào)整.
按以下公式進行:

其中a為大于0的常數(shù),在本文中a取10.最后再進行反離散余弦變換,得到嵌入一部分水印信息的區(qū)域.由于所嵌入的區(qū)域在特征區(qū)域內(nèi),而在特征區(qū)域外的值都為0,也就是說特征區(qū)域外不包含水印信息.這樣就可以把上述處理過的圖像與去掉特征區(qū)域的圖像(如圖6所示)相加.

圖6 去掉特征區(qū)域的圖像Fig.6 The image without feature area
對每個選取的特征區(qū)域進行離散余弦變換,加入水印信息,再進行反離散余弦變換,最后把這個圖像與去掉特征區(qū)域的圖像進行相加,便得到嵌入水印信息的圖像.
3 數(shù)字水印檢測
(1)特征點提取:利用本文所提供的算法從原始圖像中提取出特征點集.
(2)選取特征區(qū)域:根據(jù)上面的特征點集選取特征區(qū)域,如果兩個特征區(qū)域重疊,那么保留特征強度比較大的特征點所對應的特征區(qū)域.
(3)對特征區(qū)域進行離散余弦變換,然后對系數(shù)進行排序,并按式(9)~(11)提取水印信息.
對離散余弦變換的8×8塊中的系數(shù)進行排序后為F′i(u,v)= {x′1,x′2,…,x′64},X′的第l+1到l+m的中頻系數(shù)部分嵌入了水印信息.假設待檢測的數(shù)字水印W′= {w′1,w′2,…,w′m},則可以通過待檢水印與圖像中頻系數(shù)作相關運算來判斷是否加入了水印.只有在待檢水印為所加入的水印時,才能得到較大的相似度值.否則相似度值很小,接近于零.
那么數(shù)學期望為

根據(jù)中心極限定理,參照水印匹配與不匹配兩種情況得到閾值為TZ=aE(X2)/2.由于原始圖像難以得到,從實用性出發(fā),閾值定義為

根據(jù)式(11),如果滿足Z>TZ,則表明檢測到匹配的水印.否則,未檢測到匹配的水印.
4 實 驗
本實驗采用512×512的Lena和Peppers為宿主圖像.水印采用32位0、1序列水印,重復嵌入所選取的特征區(qū)域中,對該算法抗幾何攻擊的穩(wěn)健性進行測試.加入水印圖像的峰值信噪比分別為51.606 2、49.215 0.圖7表示原始圖像,圖8為含有水印所檢測到的特征區(qū)域的圖像.圖8所檢測到的特征區(qū)域與原始圖像所選擇的特征區(qū)域數(shù)目相同.

圖7 原始宿主圖像Lena、PeppersFig.7 Original image— Lena and Peppers
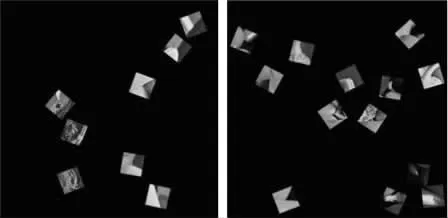
圖8 含有水印圖像的檢測結果Fig.8 The results of the watermarking image
本文以Lena為示例(如圖9、10所示),分別對含有水印信息的Lena和Peppers圖像進行了一般的幾何攻擊和常規(guī)信號處理攻擊(如表1所示),以及它們的復合攻擊(如表2所示)來檢測本文的算法.在表1和2中,分母表示在受到幾何攻擊后能夠檢測到的區(qū)域,分子表示檢測到有數(shù)字水印的區(qū)域.
從上面實驗的圖像和表1、2可以看出,與文獻[8、9]的算法相比,本文算法在對抗幾何攻擊方面有了很大提高,而且采用以本文算法提取的特征區(qū)域能夠有效地應對幾何攻擊后圖像的變化,也避免了在幾何攻擊下,嵌入的水印信息在提取的特征區(qū)域外.
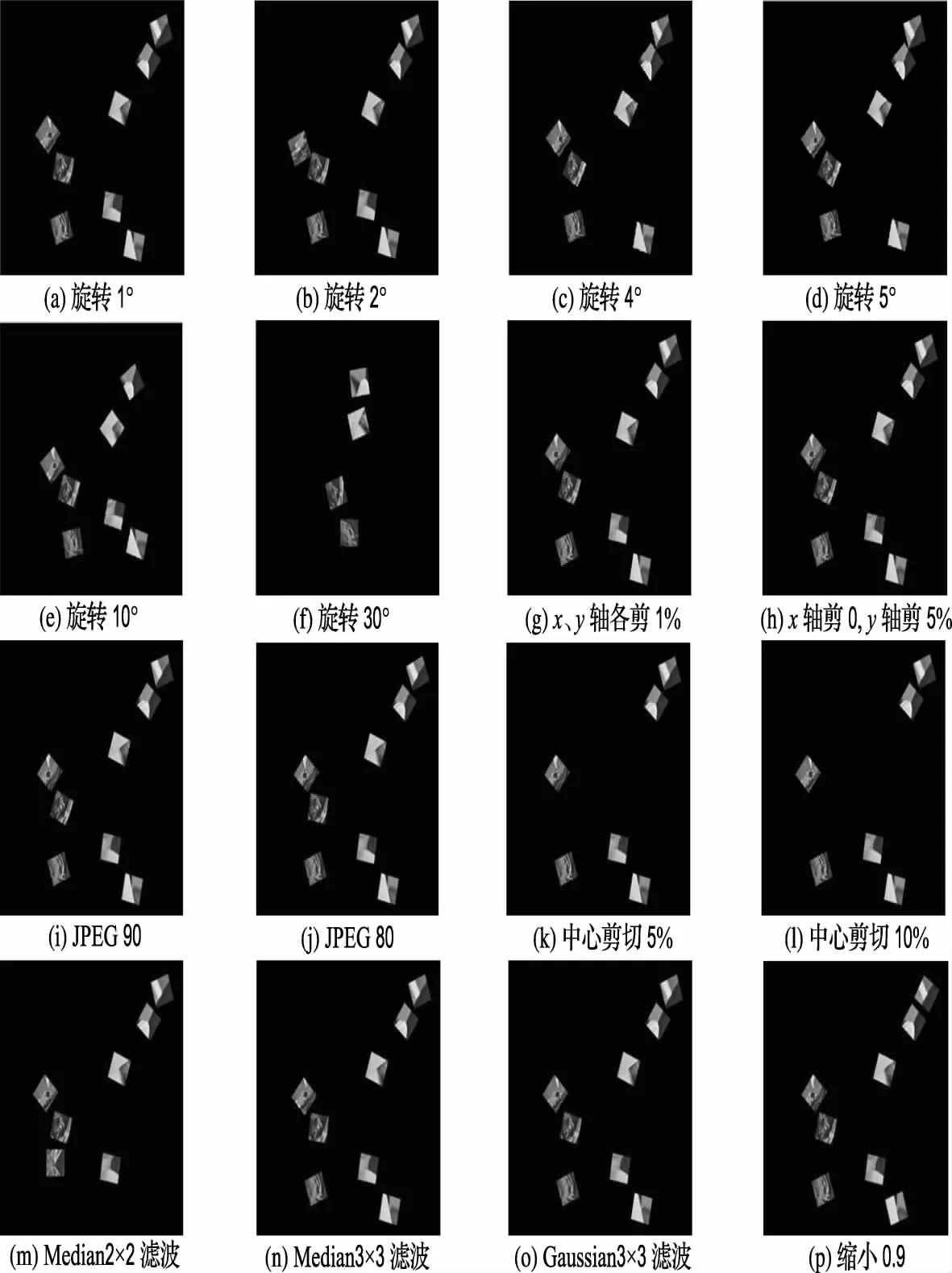
圖9 簡單攻擊Fig.9 Single attack
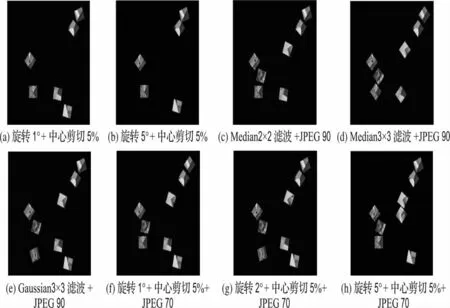
圖10 復合攻擊Fig.10 Composite attack
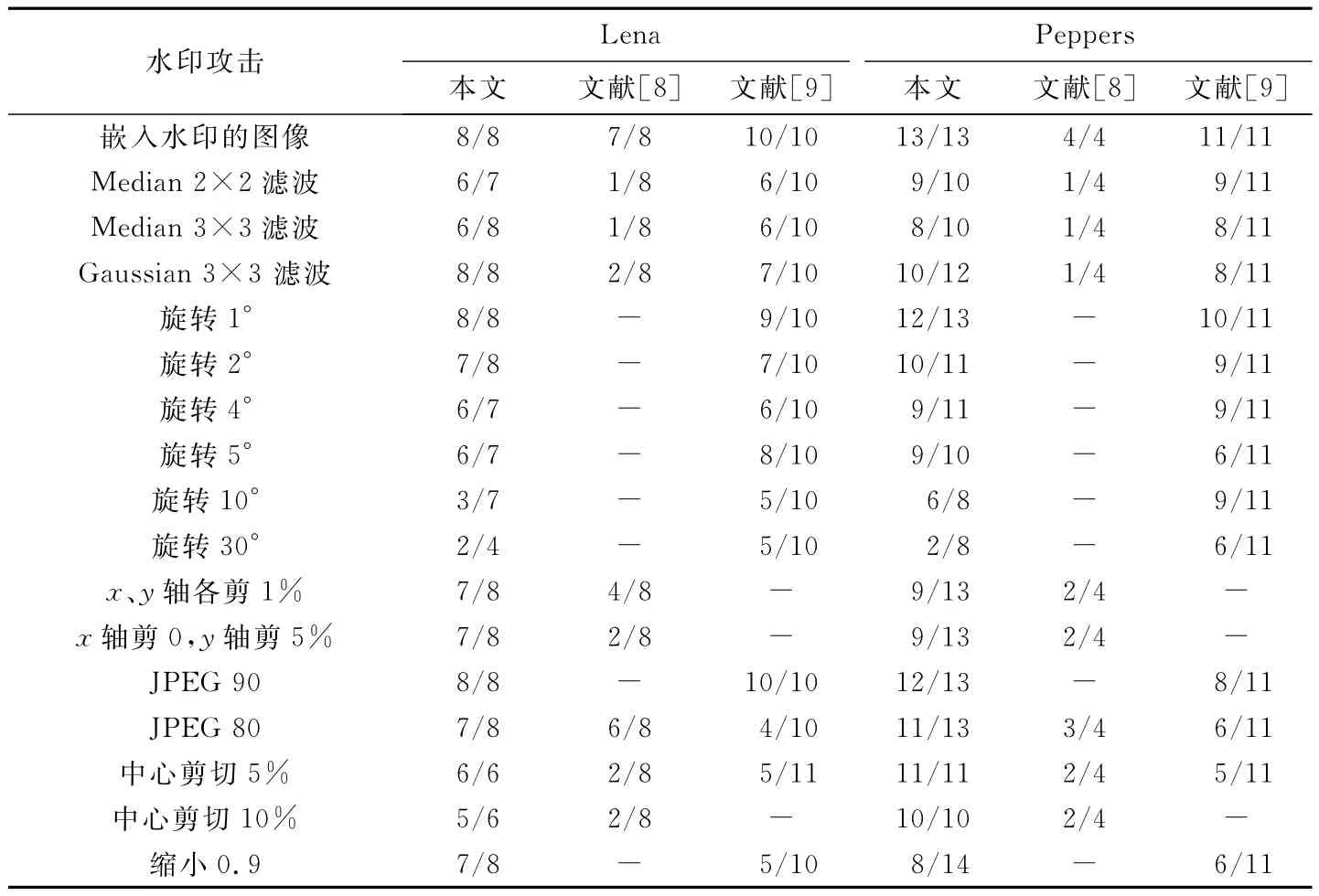
表1 實驗結果對比(簡單攻擊)Tab.1 Comparison of experimental results(single attack)
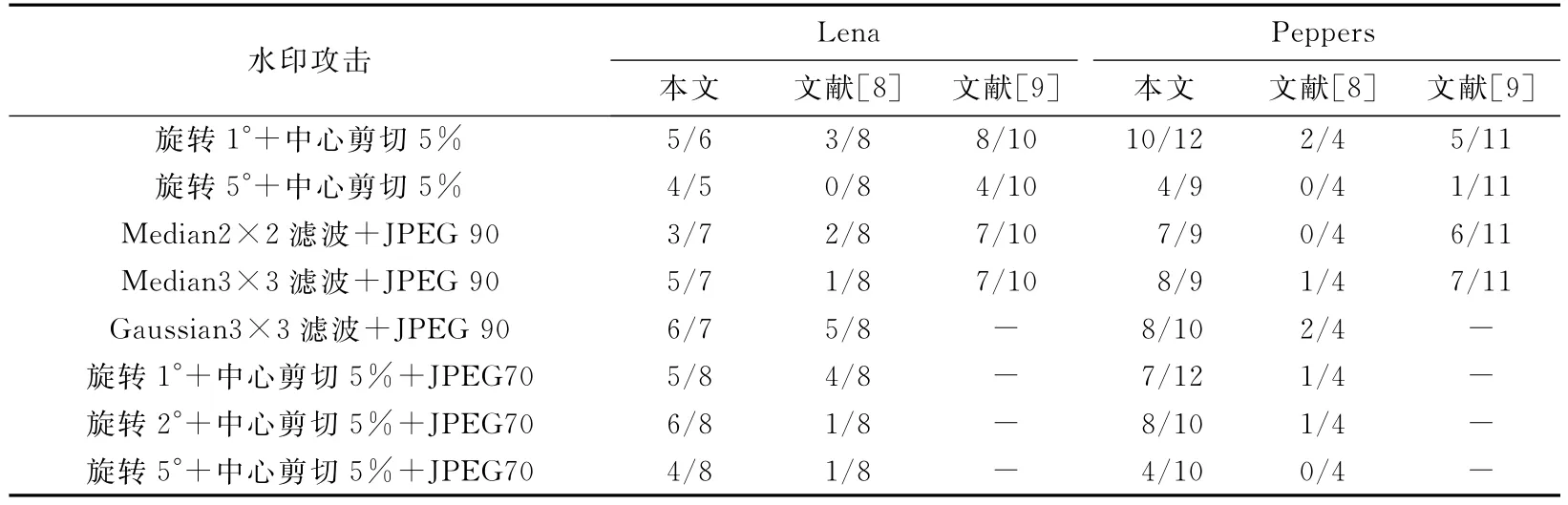
表2 實驗結果對比(復合攻擊)Tab.2 Comparison of experimental results(composite attack)
5 結 論
本文提出了一種數(shù)字圖像水印算法,利用特征點和特征方向提取出幾何不變特征區(qū)域,從而實現(xiàn)了數(shù)字水印的抗幾何攻擊.實驗結果表明,旋轉(zhuǎn)、縮放、裁減等一般性幾何攻擊以及它們的復合攻擊后的水印圖像,仍能夠較好地保持和原始圖像相同的數(shù)字水印,從而表明該算法具有良好的抗幾何攻擊的穩(wěn)健性.
[1]袁大洋,肖 俊,王 穎.數(shù)字圖像水印算法抗幾何攻擊魯棒性研究[J].電子與信息學報,2008,30(5):1251-1256
[2]MOKHTARIAN F,SUOMELA R.Robust image corner detection through curvature scale space [J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1998,20(12):1376-1381
[3]HARRIS C,STEPHENS M.A combined corner and edge detector[C]// MATTHEWS M.Proceedings of the Fourth Alvey Vision Conference.Manchester:The University of Sheffield,1988:147-151
[4]DERICHE R,GIRAUDON G.A computational approach for corner and vertex detection [J].International Journal of Computer Vision,1993,10(2):101-124
[5]PARIDA L,GEIGER D,HUMMEL R.Junctions:detection,classification,and reconstruction [J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1998,20(7):687-698
[6]PETITCOLAS F A P,ANDERSON R J,KUHN M G.Attacks on copyright marking systems[C]//Proceedings of the Second International Workshop on Information Hiding.London:Springer-Verlag,1998
[7]BAS P,CHASSERY J M,MACQ B.Geometrically invariant watermarking using feature points[J].IEEE Transactions on Signal Processing,2002,11(9):1014-1028
[8]TANG C W,HANG H M.A feature-based robust digital image watermarking scheme [J].IEEE Transactions on Signal Processing,2003,51(4):950-958
[9]WEINHEIMER J,QI X J,QI J.Towards a robust feature-based watermarking scheme [C]//Proceedings of IEEE International Conference on Image Processing.New York:IEEE,2006
[10]李雷達,郭寶龍,武曉鑰.一種新的空域抗幾何攻擊圖像水印算法[J].自動化學報,2008,34(10):1235-1242
[11]MIKOLAJCZYK K,SCHMID C.Indexing based on scale invariant interest points[C]//Proceedings of the International Conference on Computer Vision.Piscataway:IEEE,2001:525-531
[12]LINDEBERG T.Feature detection with automatic scale selection [J].International Journal of Computer Vision,1998,30(2):77-116
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年1期)2021-01-21 03:22:38
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
小天使·一年級語數(shù)英綜合(2015年2期)2015-01-14 06:35:05