提高水阻試驗電流控制精度的研究
2011-09-19 13:24:08鐘旭
自動化儀表 2011年7期
鐘 旭
(廣東技術師范學院電子與信息學院,廣東 廣州 510665)
0 引言
利用水電阻作為可調節負載元件對機車柴油機-發電機組輸出電流加以調節,實現機車柴油機加載測試研究,這已成為鐵路機務部門檢修機車不可缺少的一項重要技術手段。
近年來,隨著機車檢修技術的不斷發展,機車柴油機-發電機組輸出電流精確控制問題越來越引起人們廣泛關注。通過將電流偏差預先分段,再利用PI調節與設置控制死區相結合實現電流精確控制,是一種可行的作法[1]。但是,由于控制過程中未充分考慮極板升降產生的巨大慣性及其水溫變化影響,因此電流的控制精度也只能限制在一定程度。將極板固定,利用反向調節水位的方式來調節電流,是克服系統慣性影響的一項有效措施,因而可獲得較滿意的控制效果[2]。但其不足之處在于進排水量過小,從而令電流調節范圍過窄,所以此法只適合小型柴油機試驗場合。
鑒于此,本文提出基于恒定水溫的電流Petri網協調級混雜遞階模糊PID控制方案,有效彌補了上述方法的不足,實現了機車試驗負載電流高精度、大范圍控制。
1 系統組成原理與控制方案設計
現行機車水阻試驗系統由水阻試驗裝置和機車兩部分構成。系統工作原理圖如圖1所示。

圖1 系統工作原理圖Fig.1 Operating principle of the system
其中,水阻試驗裝置包括能量吸收轉化裝置和水電阻調節裝置兩部分。能量吸收轉化裝置由水箱、活動極板、固定極板和電解水溶液等組成;水電阻調節裝置一般由電機、渦輪蝸桿減速器和動靜滑輪組等構成[3-4]。電機輸出轉矩經蝸輪蝸桿傳遞后,通過滑輪組驅動活動極板升降,以改變活動極板組浸入水中的面積即水電阻阻值,起到調節機車柴油機-發電機組輸出電流的作用。
活動極板浸水面積S與負載電流IF的關系如下:

式中:S=ahNj;PF為主發電機功率,kW;IF為負載電流,A;ρt為水溫t℃時水電阻率,Ω·cm;l為活動極板與固定極板間距,cm;a為活動極板寬度,cm;h為活動極板浸入水中的深度,cm;Nj為極板組數。
由式(1)可知,當PF一定時,調節h可改變IF。據此,有兩種方式可達到此目標,一種是令池內水位保持不變,通過控制活動極板的入水深度來調節電流,反映到電機控制上就是對電機轉向及運行時間的控制;另一種是將活動極板固定不動,利用控制池內液位的高度來實現對h調節。兩者相比,前者調節幅度更大,調節速度也更快,但存在較大慣性和控制死區,適合于負載粗調;而后者雖然調節幅度小,調節速度慢,但卻能夠有效避免因系統慣性帶來的不利影響,因而可獲得更高的控制精度,比較適合電流微調。為此,本文采取一種折衷的控制方案,即在電流偏差較大時采取極板升降控制;而在電流偏差較小時應用水位調節,以達到優勢互補的目的。
水阻試驗過程是能量轉換消耗的過程。試驗時,由于能量的不斷交換使水溫上升,由此引起ρt不斷變化[5],令IF與h間的關系變得相對復雜。這是造成電流調節困難的根本原因。為此,設計了專門的水溫調節器,使得水溫在試驗過程中保持基本不變,即ρt基本不變,這樣IF與h之間關系變得更直接,電流更易控制。
鑒于系統在IF連續控制過程中伴有水溫調節這一離散事件,表現出典型的混合系統特征,因此,負載調節問題更適于從混雜系統思想角度加以解決[6]。為降低對整個系統的建模難度,采用遞階控制理論。所建立的控制系統結構如圖2所示。

圖2 控制系統結構圖Fig.2 Structure of control system
圖2中,控制系統分為組織層、協調層與執行層。組織層用于對給定的外部命令和任務以及現場反饋數據進行判斷,找到完成該任務的各子任務(或操作)組合,并將具體要求傳送至協調級。協調層接受上層分派子任務,產生可供執行級執行的具體動作序列并送入相應控制器。利用Petri網翻譯器建立該層模型,通過指令翻譯器直接驅動執行層控制器。執行層則完成負載電流具體控制,它由極板控制器、水位控制器和水溫控制器組成。當負載電流偏差較大時,啟用極板控制器,以縮短過渡過程時間;而當電流偏差較減小時,為避免超調,切換至水位控制器,以獲得更高的控制精度。與此同時,水溫控制器始終對不同點溫度進行實時監測,一旦溫差超限,便及時做出調整處理,保證水溫與電流同步協同控制。
為實用起見,各控制器均以單片機AT89C55為核心,構成相對獨立的單片機控制子系統。
2 協調級Petri網控制
協調級功能本質上就是決策過程,它通過任務調度與翻譯兩個步驟完成,可描述為對于給定的任務a,找到一個可激發的遷移t,使σ(t,a)有定義,進而根據σ(t,a)找到正確的翻譯串。
設 M=(N,∑,Δ,σ,μ,F)表示協調器,對于任何a∈∑,定義 T(a)={t︱σ(t,a)},定義 Tλ=T(λ)={t︱σ(t,a)},它相當于內部操作的集合。設置QT和QD兩個隊列,QT存儲未被執行的任務,QD存儲暫時條件不具備而需要推遲執行的任務。定義函數F(Q)為取出Q的第一個元素,I(Q,a)將元素a插入到Q的末尾,U(Q1,Q2)置 Q2于 Q1的末尾,N(Q)使 Q 為空,令v=a1,a2,…,aS∈Δ*為要執行的任務串,其中,Δ*表示由Δ中字符組成的字符串集,則M的調度步驟為:
① QT={a1,a2,…,aS},QD=Ф(空集);
② 如果QT為空,則退出;
③u=F(QT);
④如果存在一個t∈T(u)且t處于使能激發狀態,那么激發t,并轉⑦;
⑥ I(QD,u),如果 QT為空,則 QT=QD且 N(QD),轉步驟②;
⑦ 若QD不為空,則QT=u(QD,QT)并N(QD),轉②。
依照上述步驟,首先對字符串v中所代表的任務依次進行檢驗,若任務能執行,則立即執行;若不能,則設法找到一個內部操作序列,使依次輪到的任務能夠執行。若這一點也不能實現,則將此任務移送到等待隊列QD中,一旦M的狀態發生了變化,再將QD按原次序送返QT中,并依次進行檢驗。這樣可盡可能按v中原來的次序執行任務。
任務翻譯由Petri網翻譯器完成。它從組織級接收的字符串放到輸入帶D上開始翻譯,其結構如圖3所示。翻譯過程中,一旦D中的一個遷移t激發,Petri網便執行一條基元事件a,也就意味著所選擇的控制串z∈σ(t,a)送到了各協調器。當各協調器都到達各自終了狀態時,說明已完成了任務。
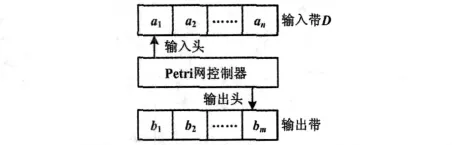
圖3 Petri網翻譯器結構圖Fig.3 Structure of Petri net translator
3 電流控制
3.1 電流的極板升降控制
依據負載特性,選擇模糊控制策略。由于常規二維模糊控制器是以誤差和誤差變化為輸入變量,因此只具有比例和微分控制作用,而缺少積分作用,故不能消除系統穩態誤差。為提高模糊控制精度,加入積分環節[7-8],但需考慮加入的時機與條件。改進的模糊PID控制器結構如圖4所示。
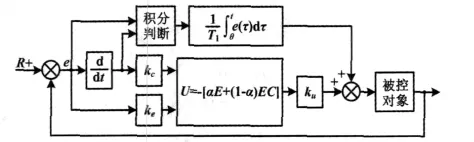
圖4 改進的模糊PID控制器Fig.4 Improved fuzzy PID controller
圖4中,輸入量為電流偏差e、偏差變化ec,輸出量為極板升降時間量 u。e的基本論域為[-4 800,+4 800](單位:A);ec基本論域由 ec(k)=e(k)-e(k-1)經現場實測確定,這里k表示電流采樣時刻;u的基本論域為[-200,+200](單位:s)。將實測值 e、ec以及u分別量化至[-6,+6],再離散化、模糊化。模糊子集E、EC、U的論域均為[-6,-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+5,+6],在此論域上定義7個等級:負大、負中、負小、零、正小、正中、正大,表示為{NB,NM,NS,ZO,PS,PM,PB}。鑒于模糊規則解析式更利于規則在線修正和對偏差、偏差變化施加不同權重,有:U= -[αE+(1-α)EC] (2)式中:U為輸出量;α∈(0,1)為加權因子。
為了避免積分環節過早加入而產生極限環振蕩現象,需要選擇好積分加入時機。具體采用以下邏輯條件加以判定:當|e|<δ且 e×ec>0或 ec=0且 e≠0時,對誤差進行積分,其中δ為系統穩態誤差;當e=0或e×ec<0時,不對誤差積分。
3.2 電流的水位控制
如前所述,水位控制就是將活動極板固定不動,通過調節進排水量來調節h,達到調節電流的目的。由于進排水量與液位間存在積分關系,因此通過這一方式可將h的變化控制得非常微小,能有效避免系統慣性帶來的不利影響,因而可以達到很高的控制精度和系統穩定性。但由于水阻池容積太大,要引起h微弱的變化需要足夠的進、排水量,因此該控制方式所需的過渡過程時間較長。針對這種狀況,在實際應用中,主要采取盡量縮小水位控制范圍的辦法,即在極板控制進入死區后方啟動該控制器。此外,采用增加進排水閥口數量以增大注排水量的方式,取得了一定效果。
為便于實現,水位控制與極板控制采取相同的模糊控制策略,即以電流偏差e和偏差變化率ec為輸入量,注排水電磁閥啟停時間量作為輸出量的模糊PID控制結構。限于篇幅,在此不贅述。
3.3 水溫控制
電流調節時,由于水溫的上升,使水電阻降低,負載電流增大,從而令電流調節變得不確定。因此,試驗過程中必須設法保持水溫穩定,以確保電流調節僅由活動極板浸水面積S這一變量所決定。傳統方式是通過專用冷卻設備不斷注入循環冷卻水,將水溫限制在沸點之下,以此維持水溫恒定[9-10]。但由于水溫控制范圍大且受試驗設備成本高、體積龐大限制,傳統方式推廣起來十分困難。為此,本文采取在水箱不同位置點分別安裝4個溫度傳感器,通過水溫控制器實時采集各點水溫,并計算相互間溫差,然后根據溫差大小控制進排水閥的啟閉。為增大進、排水量,縮短調溫時間,現場安裝了3個進水閥門、2個泄水閥門和溢水槽,通過對閥門數量及啟閉時間的控制來完成進排水量的調節,最終實現恒定水溫控制。必須指出的是,在水溫冷卻調節過程中,需要保持水箱液面高度不變,以保證極板浸入水中面積基本不發生變化。
4 應用實例
上述方案在國產DF4型內燃機車架修中進行了測試。試驗設備主要技術參數為功率2 059 kW、最大電流4 800 A、最高電壓705 V、活動極板總面積48 m2、水箱容積25 m3、活動極板升降速度0.5(m·min-1)。
極板升降模糊PID控制器相關參數為ke=800、kc=12.10、ku=35.00,采樣時間 Ts=1 s、α =0.702、TI=0.037;水位模糊PID控制器相關參數為 ke=16、kc=11.54、ku=133.21,采樣時間為 Ts=1 s、α =0.435、TI=0.021;池內水溫最大溫差控制在±4 K以內。
在機車第16手柄位,利用本文控制器進行了牽引發電機外特性調整試驗,不同工況下部分電流的控制數據如表1所示。
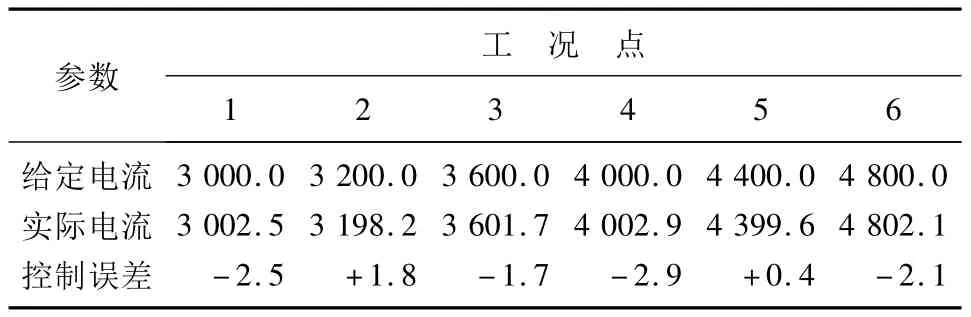
表1 部分電流控制數據表Tab.1 Partial current control data A
為驗證文中方案的有效性,在機車第16手柄位分別與常規模糊控制器、PID控制器進行了對比。電流為3 kA時,實際輸出結果如圖5所示。
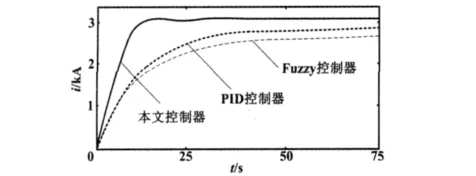
圖5 輸出曲線Fig.5 Output curves
從圖5及表1看出,與其他控制器相比,文中設計的控制器在控制初期雖然有一定量超調,但后續調整速度快且過程平穩,整個調整時間較原來平均縮短35%,電流控制精度也由過去的±50 A提高到±3 A。
5 結束語
本文闡述方案已應用在國內某機務段DF4型內燃機車檢修試驗中。結果表明,采用基于恒定水溫的電流Petri網協調級混雜遞階模糊PID控制方案是可行的,且控制快速穩定,具有較強魯棒性,真正實現了負載電流高精度大范圍控制。該方案的運用為解決機車試驗中電流精確控制問題提供了一個新的方案。
[1]李力,蔡林松,趙愛菊.水阻極板自動控制算法探討[J].北方交通大學學報:自然科學版,1996,20(4):508 -512.
[2]路永坤,薛征宇,劉成臣.水電阻負荷試驗站中穩流的模糊控制設計[J].計算機工程,2007,33(8):244 -246.
[3]馬洪.東風_4型機車水電阻測功裝置的計算[J].內燃機車,1987(6):22 -27.
[4]王冠英.水阻箱設計中的幾個問題[J].機車車輛工藝,1989(4):23-27.
[5]王春奎,方慧英,傅裕壽.水電阻性質的實驗研究[J].激光雜志,1985,6(5):253 -255.
[6]Lemmon M D,He K X,Markovsky I.Supervisory hybrid systems[J].Control Systems Magazine,1999,19(4):42 -55.
[7]黎浩榮,李立勤,李東海,等.對一種高精度模糊控制方案的研究與改進[J].清華大學學報:自然科學版,2000,40(2):114 -117.
[8]王天穎,項昌樂,李明喜,等.負荷車試驗系統的模糊自適應PID控制[J].哈爾濱工業大學學報:自然科學版,2007,39(6):997 -1000.
[9]趙輝.對機車水阻試驗采用冷卻水循環的探討[J].內燃機車,1992(9):16 -18.
[10]趙慶龍,黃英,伍錦,等.發動機-發電機組水電阻吸能裝置電阻計算研究[J].兵工學報,2005,26(6):721-724.
