基于GPS的外測設備精度鑒定測姿方法的研究與應用*
2011-08-29 05:46:20劉丙申孫付平張紹軍
全球定位系統 2011年4期
劉丙申,孫付平,張紹軍
(1.信息工程大學測繪學院,河南 鄭州450052;2.63883部隊,河南 洛陽471000;3.63880部隊,河南 洛陽471003)
0 引 言
全球定位系統(簡稱GPS)建成以來,在軍事、導航、勘測等領域的應用日益廣泛。系統除了能夠滿足眾多用戶的導航、測量、授時需求以外,在運動載體姿態測量領域的技術也日趨成熟。
隨著靶場航天測控系統的發展,對外測設備精度鑒定試驗提出了更高的要求,對鑒定標準精度的要求越來越高[1]。而在高動態GPS精度鑒定試驗中,影響精度的因素為鑒定標準設備的測量精度和因飛行目標的姿態變化引起的跟蹤點不一致修正誤差,尤為后者影響較大。由于目前精度鑒定試驗所采用的電子羅盤測姿系統測姿精度低、工作繁瑣且易受外界環境和磁場的影響,已不能滿足靶場外測設備精度鑒定任務的要求,迫切需要提高飛行目標的姿態測量精度。為此針對鑒定試驗的新需求,開展GPS外測設備精度鑒定測姿方法的研究與應用,提出利用GPS取代電子羅盤進行飛機姿態測量一種新的測姿方法,使系統使用范圍得到拓寬、鑒定標準的精度進一步提高,將在航天測控設備精度鑒定、飛行目標高精度測姿等試驗領域發揮極大地作用。
1 GPS測姿原理
1.1 GPS測姿基本原理
GPS測姿的基本原理應用了GPS動態相對定位理論[2]。其高精度實時動態差分定位的核心技術是動態解算載波相位測量整周模糊度(Ambiguity Resolution On The Fly,OTF)[3-4]。關于動態差分定位的基本理論和實踐問題得到了較好的解決,尤其是短基線情況下,可以可靠地解算出整周模糊度,獲得很高的定位精度。
在目前情況下,高精度GPS接收機實時動態差分定位的精度可達2cm[5]。下面以單基線為例來說明GPS測姿系統的基本原理并給出計算公式,假定沿飛機機身方向安裝主副兩個GPS天線,形成了短基線GPS相對定位系統,此時,副天線相對于主天線的高度差便反映了飛機俯仰變化,其基線在當地水平面的投影線與正北夾角便反映出了飛機機頭指向(即航向角)。
這里以主天線相位中心為坐標原點O,x軸指大地北,y軸指天,z軸成右手系建立一個測量坐標系O-x,y,z.設在某一觀測時刻ti,副天線的相位中心在 O-x,y,z坐標系中坐標為[xi,yi,zi],在前面假設條件下,既主、副天線連線與機身的縱軸平行,延機頭方向副天線在主天線之前,則此時飛機的航向角Ai,俯仰角Ei可表達為

如果說此時主副天線安裝連線與縱軸垂直的話,上式中的Ei就表征了飛機的滾動角。
實際應用中,一條基線是無法完整地解出3個姿態角的。而至少需要兩條基線,即4天線構成的兩條正交基線為四天線法。
其測姿精度可用下式估算
相對定位誤差(cm)÷天線基線(cm)×57.3(°)(2)
1.2 典型的GPS測姿系統組成
目前的GPS測姿系統有兩種典型的配置方式,其一是采用3~4臺獨立的精密測量型GPS接收機再加上專業的實時/事后處理軟件組成;其二是選用自主解算的姿態測量型GPS接收機。
1.2.1 獨立GPS接收機測姿系統
如圖1所示,在動態載體上安裝3~4臺獨立的精密測量型GPS接收機,同時安裝用于數據采集和信息處理的工控計算機。GPS天線將來自衛星的信號轉化為電信號并通過線纜傳送到各自的GPS接收機,接收機完成對衛星信號的處理并將載波相位觀測量通過串行數據接口送至工控計算機。運行于工控計算機上的姿態解算軟件利用這些數據以及事先輸入的GPS天線的位置實時完成姿態值的解算。
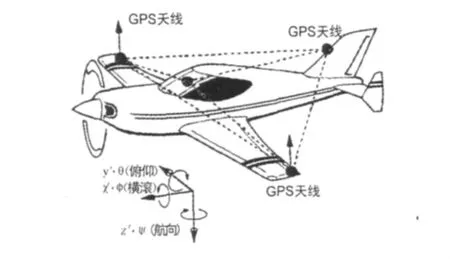
圖1 獨立GPS接收機測姿系統組成
1.2.2 自主解算的姿態測量型接收機測姿系統
此類接收機的典型結構圖2所示,接收機內部的數據流向為三個從接收機將數據發送到主接收機,主接收機處理來自四個GPS數據,實時給出解算結果。需要說明的是,這四臺接收機采用相同的時鐘電路,可以在進行解算的時候減少由于接收機時鐘引入的未知數的個數。另外,采用4臺GPS接收機與4個GPS天線是為了克服在實際應用當中由于載體并非剛體而引入的不確定性。
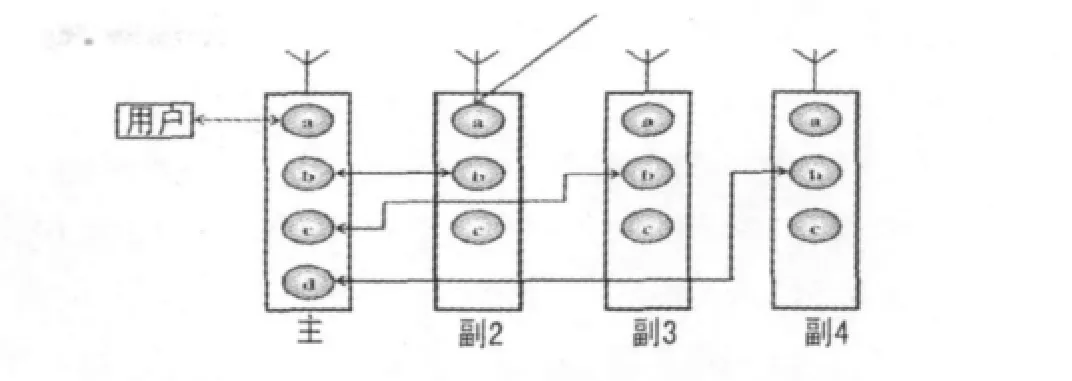
圖2 自主解算的姿態測量型接收機測姿系統典型結構
1.2.3 兩種方案的比較
上述兩種方案從理論分析,都能夠達到0.1°至0.2°的測姿精度(GPS測量基線在4m至8m的情況下)。但從性價比和系統用途的廣泛性角度著眼,顯然方案一的組成更加靈活、應用更加廣泛。而方案二為專用于GPS姿態測量型的接收機,設備集中于一體且多為單頻。因此,對于精度較高、多任務要求第一種方案為好。當然應用中可根據情況而定。
2 精度鑒定GPS測姿系統的組成和應用分析
2.1 精度鑒定中GPS測姿特點
靶場外測設備精度鑒定試驗對GPS測姿有其自身的要求。從裝機實際應用看,目前實現雙基線四天線安裝比較困難;從精度鑒定試驗對飛機姿態變化情況看,由于精度鑒定數據比對段大多為直航路,三軸變化中滾動角變化較小(1°左右)影響不大,僅需完成偏航角、俯仰角的測量即可;從性價比和系統用途的廣泛性看,應用獨立GPS接收機測姿系統較好。
2.2 精度鑒定中GPS測姿系統的組成
根據靶場外測設備精度鑒定對試驗飛機測姿的總體要求及測姿特點,為組成靈活、應用方便、提高性價比,采用獨立GPS接收機測姿方案較好。具體為2臺NovAtel DL-PLUS4型GPS接收機構成主副測量系統與便攜式計算機及相關的軟件等組成測姿系統。設備布局參照圖1,主副接收機盡量安裝于機背中心軸上。
2.3 精度鑒定GPS測姿系統應用可行性分析
為了驗證和分析GPS測姿系統的可行性,通過靜態試驗即對測量數據進行動態相對定位和姿態解算,并同大地測量結果比對;利用實際飛行數據即從測姿型GPS實測數據中分流出主、副天線GPS測量數據,仿獨立GPS接收機測姿數據處理結果進行精度分析。
2.3.1 靜態試驗及分析
在一寬闊的水泥場坪上選一中心點,以2m至20m的不同距離為半徑畫出5個同心圓,從正北方向開始每隔45°設一測量線其與同心圓的相交點上設為標志點。用精密的大地測量經緯儀進行中心點與各標志點測量,測出準確的基線長度與“中心點至標志點”連線的正北夾角(基線測量精度<3mm,角度測量精度優于10″)。
具體試驗時,中心點放置一臺高精度的GPS接收機做基準站并模仿GPS測姿系統“主接收機”工作,同時在各標志點依次放置另一臺高精度的GPS接收機做基準站并模仿GPS測姿系統“副接收機”工作,記錄所有原始測量數據。
試驗后應用商業化GPS后處理軟件處理得到的各標志點與中心點的基線及其連線的正北夾角數據,并與精密的大地測量結果比對,由于方差的大小反映了總體觀測結果靠近真值的程度[6]。因此,利用方差式均方差(中誤差)對比對結果作統計分析。
試驗條件:數據采樣率10c/s,衛星載止角15°,可見衛星6顆以上,共同采樣時間10min,GPS精度品質因數Q=1。
試驗統計結果如表1、圖3~圖7所示。
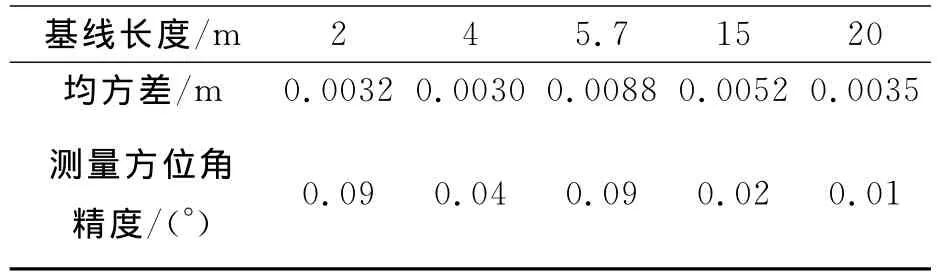
表1 靜態測量統計結果
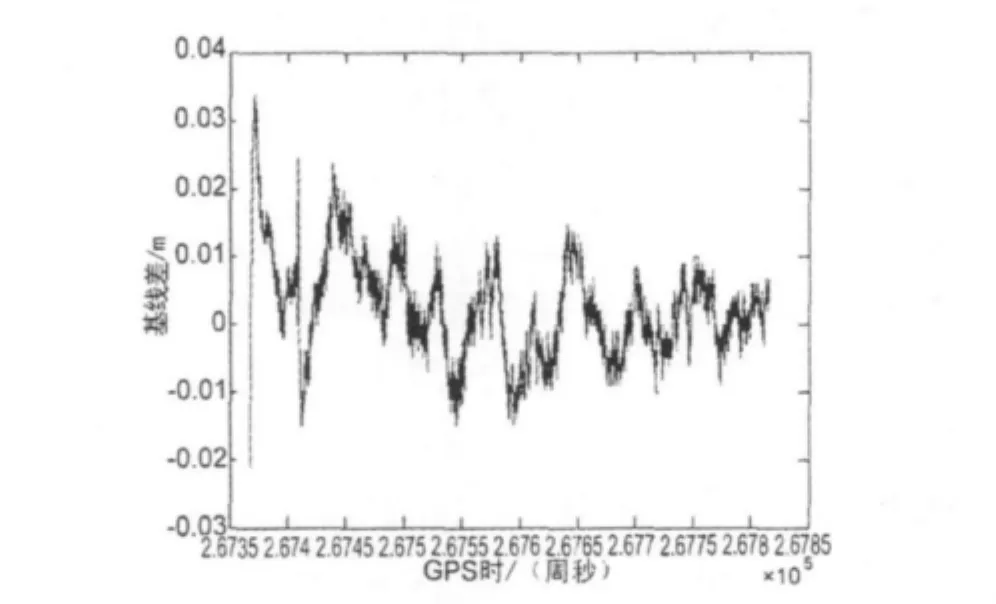
圖3 2m基線比對殘差
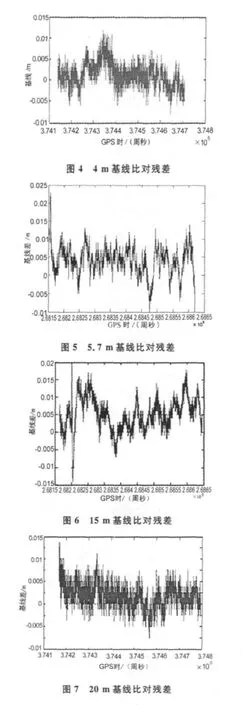
從表1中可以看出,GPS靜態相對測量中,其基線測量精度優于1cm,地面水平角(相當于飛行時的航行角)測量精度優于0.1°。但基線長度小于2m和5.7m波長整數倍時,測角精度會明顯降低。其中2m情況符合測姿原理,5.7m可能由于處理過程或其它原因使測角精度出現降低的現象。因此,應用中盡可能是基線長度大于2m(4~8m最好)和避開波長的整數倍。
2.3.2 動態試驗數據分析
2009年上半年,在某運輸機上安裝了測姿型GPS系統,利用其實際飛行試驗數據,對原始測量數據進行了信息復原與分流,得到了相對GPS主副天線的各自的測量數據,仿照獨立GPS接收機測姿數據處理方法,應用商業化GPS后處理軟件處理得到了飛機航行中每個時刻的主副天線基線長度及飛機的航向角,并與實際主副天線基線長度值及同時測量的高精度平臺慣導系統測姿數據(直線段)進行比對,以檢驗GPS測姿的可行性和測姿精度。具體數據比對時,選用的GPS動態相對定位處理結果的品質因數Q均在2以內。統計結果如表2所示:
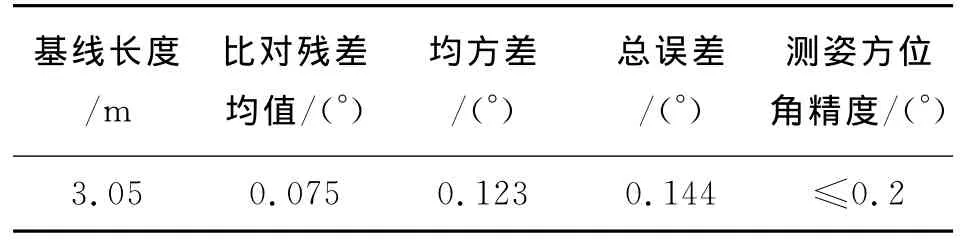
表2 動態GPS姿態測量與慣導姿態測量比對殘差
2.3.3 試驗結果分析
通過以上精度分析和與慣導系統測姿數據的殘差比對結果:
一是靜態姿態測量中測角精度達0.1°以內 ,基線長度對測角精度的影響符合測姿原理,隨基線的增大而測姿精度提高,但基線長度為波長整數倍時精度變差,應同時注意。
二是動態試驗中同慣導系統測姿數據的殘差比對總誤差只有0.144°。由此可見,GPS測姿用于航天測控設備精度鑒定試驗完全可行,其精度可以達到0.2°以內(直線航路),較電子羅盤正常工作時測姿精度2°提高了一個數量級,可有效提高鑒定試驗中目標不一致修正精度,且不受外界的影響,具有全天候、性能穩定、測姿精度高等特點。
2.4 試驗任務應用情況
在2010年5月某靶場多地綜合校飛試驗中,使用飛機在其機背上安裝兩臺高動態RTK雙頻GPS接收機,以求得飛機兩維姿態方位角和俯仰角。由于安裝受到飛機背部可用安裝位置的限制,使主、副GPS接收機天線安裝構成的基線與飛機的中軸線不可能平行,因此,通過大地測量進行了精確的標校,以便數據處理時進行姿態角的修正,而得到準確的飛機姿態。具體情況:主副接收機天線相距2.049m(應用中4m到8m較為理想),采樣率10C/S,衛星載止角15°,品質因數Q在2以內,航路設計為南北走向的直線航路,共進行了5個架次的數據的處理。以下是依據大地測量標校主、副接收機天線相位中心測量數據2.049m為基準,按照式(1)測姿精度公式,對結果進行了誤差統計、分析,統計誤差如表3所示,給出了第1、2兩個架次測量估算誤差曲線,如圖8、9所示。
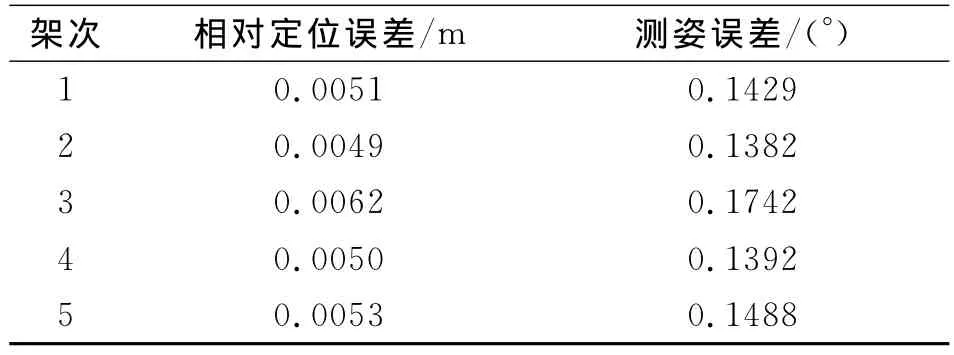
表3 動態GPS姿態測量估算誤差

3 結 論
通過大量的試驗數據分析、研究和實際任務應用驗證,利用兩臺GPS接收機配以專業的實時/事后處理軟件組成外測設備精度鑒定測姿系統,能夠滿足試驗任務的要求。其方法可行,安裝方便靈活、性價比高,測姿精度優于0.2°,較電子羅盤的測姿精度提高了一個數量級。GPS測姿技術在測控系統精度鑒定中的成功應用,開創了GPS應用的新領域,典型的組成方法將在相關試驗和工作中得到推廣和應用。
[1]劉丙申,劉春魁,杜海濤.靶場外測設備精度鑒定[M].長沙:國防科技大學出版社,2008.
[2]周朝猛,王 玨.GPS姿態技術在測量船上的應用初探[C]//空間定位技術應用研討交流會論文集,2003.
[3]劉俊承 .GPS姿態確定技術研究 [D].華北工學院碩士學位論文,2002.
[4]張守信.GPS衛星測量定位理論與應用[M].國防科技大學出版社,1996.
[5]趙健康.利用GPS載波相位快速確定動態載體姿態及精度分析 [J].國防科技大學學報,1999,21(4):114-117.
[6]隋立芬,宋力杰.誤差理論與測量平差基礎[M].北京:解放軍出版社,2004.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45