基于幾何精度衰減因子的單站無源定位精度分析方法
2011-08-21 12:33:48陳思劍
探測與控制學報 2011年6期
關鍵詞:測量
陳思劍,張 旻,羅 爭
(1.解放軍電子工程學院,安徽 合肥 230037;2.安徽省電子制約技術重點實驗室,安徽 合肥 230037)
0 引言
單站無源定位技術是電子對抗應用中的一項重要技術,不僅定位系統設備量小,獨立性強,而且較其他無源定位系統具有更好的戰術靈活性、隱蔽性和不易被敵方發覺的優點,對提高系統在電子戰環境下的生存和作戰能力有著極其重要的作用和意義[1-4]。無源定位系統模型討論了觀測站利用什么觀測量來實現對輻射源無源定位的問題;定位算法則是研究如何利用上述模型完成定位。然而,上述的定位模型和定位算法能否應用于工程實際中,必須通過定位精度分析進行評估,即定位精度分析對定位算法的最終選擇具有決定性的意義。測量TDOA是一種單站無源定位方法,具有較高的研究價值。文獻[5—6]中研究了到達方向(DOA)和到達時間(TOA)對運動輻射源單站無源定位的模型和算法,可以實現固定單站對運動輻射源的定位,但是目前尚未有文獻對其定位精度進行專門的研究分析,這便使得該定位方法是否能夠滿足下一步工程應用的定位精度要求變得無據可循。
為了驗證測量TDOA定位方法是否能滿足工程應用定位精度要求,本文提出一種基于幾何精度衰減因子(GDOP)的單站無源定位精度分析方法。
1 基于TDOA固定單站的定位原理
根據文獻[7]中提出的TDOA固定單站無源定位方法,得到本文的定位方法總體思路:首先建立定位模型,然后利用對輻射源飛行目標測量得到的數據信息,通過分析觀測平臺和目標間的運動關系,從運動學原理的角度出發,根據現有的幾何知識,求解出目標的位置信息,最后對定位解進行單次和多次的定位精度仿真分析,得出相應結論。論文中定位方法研究的基本原理如圖1所示,虛線框圖是本文的重點。

圖1 單站無源定位技術的基本原理圖Fig.1 The basic schematic of single observer passive location
從文獻[7]中可知,在沒有誤差的情況下,通過三次DOA和四次TOA的測量數據可以對輻射源目標進行精確定位。為了易于表述,本文以二維情況為例討論,三維條件可以用同樣的方法分析。假定觀測站O固定不動,設對周期Tr的全部脈沖列,每隔M個脈沖到達時間測量時刻為Tj(j=0,1,2,3…),MTr時間內目標運動的距離為d,且Tj時刻的觀測方位角為βj,如圖2所示。

圖2 輻射源與觀測位置的運動幾何關系模型Fig.2 The geometry relation diagram of emitter and observer position


式(3)中,c為電磁波傳播速度,且Δrj=rj-rj-1。
對于勻速直線運動目標,只要航跡不是徑向,即Δβj=0,航向角有解。根據三次DOA和四次TOA的測量數據,通過三角形的幾何關系分別可求解出航向角θ、距離r、d和速度v的表達式如下:

通過上述TDOA基本原理的表達式,可以看出DOA和TOA等參數的測量誤差對定位結果會產生相應的影響,但是無法知道對其定位精度影響的具體程度。所以,本文提出了一種基于GDOP的定位精度分析方法,很好地解決了該問題。
2 TD-G定位精度分析方法原理
在第1節中,對圖2中基于TDOA固定單站對勻速直線輻射源目標無源定位的二維模型進行分析,可以得到了r、v、DOA、TOA之間的關系,但是要確定該定位方法的實用價值,就必須進行深入研究。因此,針對各參數的測量誤差對定位結果影響程度是否能夠滿足該定位方法工程應用要求的問題,本文提出了一種基于GDOP的定位精度分析方法,該分析方法是在測量TOA和DOA的基礎上,以GDOP的推導為出發點進行深入研究,故將其簡稱為TD-G定位精度分析方法。
2.1 幾何精度衰減因子(GDOP)
如圖2,已知條件與第1章中的基本相同,并設(xS,yS)為目標S的位置,(x0,y0)為觀測站O 在坐標系中的位置,S0為初始觀測到達時間,r0為初始S、O之間的距離,c為電磁波傳播速度,利用固定單站無源定位方法對勻速直線飛行的目標進行定位的表達式可整理為:

式(5)中:

假設獲得的測量參數均值為零且相互獨立,且均方值分別為:

為了研究具體影響的程度,對式(6)全微分可得目標位置的定位均方誤差如下

則定位誤差為

2.2 TD-G定位精度分析方法
在2.1節中,對式(5)左邊含有XS的等式進行分析發現,等式右邊分別有X0、Tn、n MTr、r0和βn五個可變測量參數。容易看出,在參數測量誤差確定后,n可以在0~3之間隨機取值;X0的測量誤差對定位結果影響較小;從式(4)中可知,r0的測量誤差取決于ΔT的測量誤差,它對定位精度的影響間接通過σr的大小反應出來,見式(8)。對含有YS的等式分析方法與XS相同。
從式(8)中可以看出,在兩個等式右邊的四個誤差項當中,σβ和σT兩個誤差項的系數中包含c2,這極大地影響了定位均方誤差的結果;而由于量級的原因,另外兩項的測量誤差變化對結果的影響幾乎可以忽略不計。所以,包含有σβ和σT的兩項重要參數的變化對等式左邊的結果影響占主導地位,進而影響了定位誤差GDOP的大小。
TD-G定位精度分析方法步驟如下:
1)在無測量誤差的條件下,驗證測量TDOA固定單站無源定位方法的可實現性。
2)利用本文推導的GDOP的結果進行單次定位誤差分析,來判斷對定位精度起主導影響作用的測量因子,并確定其可觀測區域。
3)根據DOA和TOA參數的實際測量誤差范圍,計算定位點的均方根誤差和相對定位誤差。利用三組不同的測量誤差數據研究該定位方法得到的結果是否達到工程應用的精度要求。
4)最后分別對該定位方法隨著DOA和TOA參數的測量誤差線性變化的相應變化結果進行研究,即根據求出的一系列相對定位誤差結果對定位的穩定性進行判斷。
經過上述步驟分析之后,該定位方法在工程中的適用性和定位的穩定性便可以清楚地知道,這就是TD-G定位精度分析方法的優勢所在。下面通過實驗仿真來研究該分析方法的實用性。
3 計算機的仿真與分析
3.1 實驗1無測量誤差的條件下固定單站(GDOP)無源定位的仿真分析
如圖2所示,已知觀測站O位于坐標原點,目標做勻速直線運動,飛行速度v=240 m/s,飛行航向角θ=150°,運動的初始位置為(9 000,9 000)m,初始方位角為45°,輻射源發射的脈沖信號周期為Tr=2.5 ms,采樣脈沖數為M =1 000,在等MTr時間內目標運動的距離AB=BC=CD=d。設在Tj時刻的觀測方位角為βj(j=0,1,2,3),圖3則為相關仿真圖。



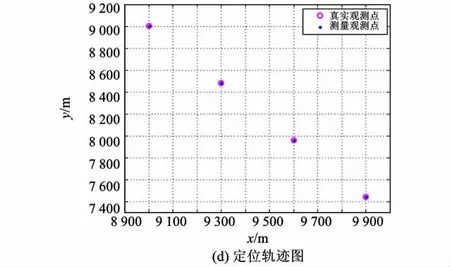
圖3 利用DOA和TOA的測量數據的定位結果Fig.3 The location results using DOA and TOA measurements
結論:通過仿真結果可以發現,在沒有誤差干擾的情況下,真實定位值和測量值完全一致,從而,驗證了在固定單觀測站對勻速直線運動的輻射源目標無源定位的條件下,利用DOA和TOA的測量數據,可以精確定位。
3.2 實驗2單次定位誤差的仿真分析
基本仿真條件和目標的運動軌跡與實驗1相同,另外,設標準的DOA測量誤差、TOA測量誤差、觀測站址各分量的誤差和測距誤差分別為σβ=2.5 mrad,σT=12 ns,σw=5 m,σr=50 m,n=1。
根據前文推導的定位誤差公式,基于測量子集(T,β)的定位誤差等高線分布對比仿真結果如圖4所示。

圖4 基于單站無源定位TDOA測量的定位誤差等高線Fig.4 The location error contour mapping based on single observer passive location using TDOA measurements
從仿真結果可得到如下結論:
1)在400 k m×400 k m的區域內,定位誤差基本都在3 k m以內,可以滿足工程應用定位精度要求。從仿真圖的定位誤差結果可知:在影響單次定位精度的因素中,DOA和TOA測量精度起著主導作用。
2)飛行器和目標間的相對運動關系對定位精度也存在影響。沿目標運動速度方向的定位誤差越大,可能出現不可觀測的情況[8];在與目標運動速度方向垂直的方向上測距誤差最小。
3.3 實驗3對比DOA、TOA測量誤差對定位精度的影響
用三組不同的DOA和TOA測量誤差對實驗1中的四個定位點進行定位精度分析,分別對各點進行500次蒙特卡羅仿真。仿真條件和目標的運動軌跡與實驗2相同,仿真結果如表1所示。

表1 不同DOA和TOA測量精度條件下的定位精度對比Tab.1 The location precision co mparison accor ding to different DOA and TOA measurements
在表1中,可知目標的真實位置和在三組不同的DOA和TOA測量誤差條件下的定位結果,對比發現:1)受測量條件的影響,目標位置與真實位置點之間總會存在一定的偏差;2)從表中的第1和第2種情況對比可以看出,在測時差精度為12 ns的情況下,隨著DOA測量精度從2.5 mrad變化為5 mrad,定位精度基本不變;而第1和第3種情況對比可知,在DOA測量精度不變的情況下,隨著TOA的測量精度從12 ns變化為24 ns,四個定位點的平均均方根定位誤差變化較大,增大了近1倍。在工程應用中,上述的DOA和TOA測量技術已經很成熟。因而,TOA的測量精度成為影響定位精度的主導因素之一,即該定位方法對TOA的測量精度具有較高的要求。3)由表1可以得知,經過500次蒙特卡洛仿真,四個定位點的相對定位精度依然可以穩定在2% 以內,足以說明該定位方法具有較高的定位精度,因此,該定位方法具有比較高的實用性,可以進行更深地研究。
3.4 實驗4單定位點多次定位誤差的仿真分析
從實驗3中的結論可知,四個定位點的定位精度基本一致。為了更進一步研究DOA和TOA的測量精度對定位精度的影響,下列實驗觀察上述四個定位點的相對定位誤差分別隨著DOA測量精度和TOA測量精度變化而變化的具體情況,并隨機抽取一個定位點進行定位精度仿真實驗,假設DOA測量誤差范圍為0~40 mrad,步進為1 mrad;TOA測量誤差范圍為0~40 ns,步進為1 ns,仿真條件和目標運動軌跡與實驗3相同,仿真結果取500次Monte-Carlo。仿真結果如圖5、圖6所示。原始DOA測量精度σβ=2.5 mrad,TOA測量精度σT=12 ns。且該結果用相對定位誤差

式(10)中,(xk,yk)和)為目標在上述四個定位點中隨機選取的第k個定位點的位置的真實值和測量值,rk為k時刻目標與固定單觀測站之間的距離,δrk則為各方向上的誤差平方和。
從圖5中可以看出,在TOA測量精度σT=12 ns不變的條件下,隨著DOA的測量精度從0 mrad逐漸增大到40 mrad,相對定位誤差從2.5%增加到3.5%,增長趨勢比較平緩;而從圖6中可知,在DOA測量精度σβ恒為2.5 mrad的條件下,隨著TOA的測量精度從0 ns逐漸增大到40 ns,相對定位誤差從0.2%增大到4.3%。所以,相比較而言,TOA的測量精度對定位精度的影響更大。另外,對于隨機選取的定位點,在DOA測量精度增大到40 mrad或TOA測量精度增大到40 ns的情況下,相對定位精度依然可以保持在4.3%以內,足以說明該方法具備了工程應用的精度要求,且具有較好的定位穩定性,體現了其良好的實際應用價值。

圖5 DOA測量誤差對定位精度的影響Fig.5 The location precision influence based on DOA error

圖6 TOA測量誤差對定位精度的影響Fig.6 The location precision influence based on TOA error
4 結論
本文提出了一種基于幾何精度衰減因子(GDOP)的定位精度分析方法。該方法首先提取了影響TDOA定位精度的測量因子;然后分別以這些因子作為輸入變量,根據幾何精度衰減因子(GDOP),得到了相對定位誤差與影響定位結果的參數測量誤差之間的變化關系以及可觀測區域;最后再確定是否能夠滿足具體工程項目的定位精度和定位穩定性標準。仿真結果表明:該定位精度分析方法能夠全面地評估TDOA的應用價值,具有重要的意義,經該方法驗證,TDOA具有較高的定位精度和較好的定位穩定性,可以滿足工程應用的實際定位要求,并具有較強的實用性。論文中的研究內容和結論為該方法下一步在工程中的應用提供了可靠的適用依據,同時也填補了相關理論空缺,對其他無源定位方法的精度分析也具有一定借鑒作用。
[1]Ying W D.Constrained total least squares algorit h m f or passive location based on bearing-only measurements[J].Science in China Series F:Infor mation Sciences,2007,50(4):576-586.
[2]孫仲康,周一宇,何黎星.單多基地有源無源定位技術[M].北京:國防工業出版社,1996.
[3]Song T L.Observability of target tracking with bearingonly measurements[J].IEEE Transaction on Aerospace and Electronic System,1996,33(4):1 468-1 472.
[4]李宗華,郭福成,周一宇,等.測量TOA和DOA的單站無源定位跟蹤可觀測條件[J].國防科技大學學報,2004,26(2):30-34.LI Zonghua,GUO Fucheng,ZHOU Yiyu,et al.The observability conditions of the single observer passive location and tracking based on TOA and DOA measurements[J].National University of Defense Technology,2004,26(2):30-34.
[5]楊莘元,鄭思海.基于運動輻射體TOA和DOA測量的單站被動定位算法[J].電子學報,1996,24(12):66-69.YANG Xinyuan,ZHENG Sihai.A single observer passive location method based on TOA and DOA measurements[J].Acta Electronica Sinica,1996,24(12):66-69.
[6]王杰貴,羅景青,尹成友,等.固定單站對機動目標無源定位I MM 算法[J].信號處理,2002,18(2):137-140.WANG Jiegui,LUO Jingqing,YIN Chengyou,et al.The Interacting multiple-model algorith m for passive localization of maneuvering target by single fixed station[J].Signal Processing,2002,18(2):137-140.
[7]孫仲康,郭福成,馮道旺.單站無源定位跟蹤技術[M].北京:國防工業出版社,2008.
[8]LI Zonghua,FENG Dao wang,SUN Zhongkang,ZHOU Yiyu.Passive location using time of arrival along with direction of arrival and its changing rate[C]//2003 IEEE Inter national Conference on Robotics,Intelligent Systemsand Signal Processing.Changsha,China:IEEE,2003:261-265.
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00