陣列式磁懸浮用電磁鐵的定點懸浮模糊控制技術
2011-08-07 08:13:38明正峰王璐璐張竟飛
電工技術學報 2011年12期
關鍵詞:系統
明正峰 王 浩 王璐璐 汶 濤 張竟飛
(西安電子科技大學機電工程學院 西安 710071)
1 引言
在常用的磁懸浮系統中,電磁懸浮是通以直流電的常導線圈所產生的磁場,對鐵磁材料產生吸力(或斥力)來實現懸浮的。目前,世界上有三種類型的磁懸浮:一是以德國為代表的常導電式磁懸浮,二是以日本為代表的超導電動磁懸浮,三是我國的永磁懸浮。
常導電磁懸浮技術一般最大可達到厘米級的懸浮高度,但由于能量損耗大和懸浮氣隙小等缺陷限制了該技術的進一步發展。超導電磁懸浮采用低溫超導磁體,懸浮氣隙較大,可達到分米級的懸浮高度,但由于采用閉環控制、磁場波動較大及成本過高等原因,其工程應用價值有待進一步論證。在此背景下,以節省能量、增大懸浮氣隙、增大懸浮物移動范圍等方面有較大優勢的分布式電磁–永磁混合懸浮系統引起越來越多研究者的關注。
電磁-永磁混合懸浮是近年來興起的一種新的電磁懸浮技術,是在常導電磁懸浮的基礎上,通過采用永磁鐵等新材料和與其對應的新結構,改進而成的電磁懸浮技術。電磁-永磁混合懸浮主要是將提供電磁力的常規電磁鐵嵌入永磁鐵等材料,利用其本身的儲能,克服一部分做功,從而減小系統的總耗能和功率損耗,并使得系統易于小型化,利于和其它系統的集成[1-18]。
針對磁懸浮系統,有許多學者提出了相應的控制策略。比如,針對磁懸浮列車系統,有學者設計了一套適合中低速磁懸浮列車自身特點的牽引控制系統[1];針對磁懸浮球系統,有學者采用Fuzzy-PID復合控制模型對磁懸浮球系統進行控制,得到了理想的控制效果[2];針對混合懸浮系統,有學者提出了混合懸浮系統的神經元 PID(proprotion integration differentiation)控制策略,并用實驗證明該控制策略能實現平穩起浮[3]。同時,由于磁懸浮系統自身具有耦合性等特點,而解耦理論、協調控制可以改善自動系統的調節品質,提高系統的可靠性及控制質量[4-6]。因此,可以考慮在磁懸浮系統的控制策略中加入解耦理論和協調控制的思想。
為了對所提出的控制策略進行驗證,有許多文獻對磁懸浮系統自身及其控制系統做了仿真分析。有學者建立了永久磁鐵和常導線圈構成的混合式懸浮系統的數學模型,并分析它的一些性質,通過仿真說明混合懸浮系統具有小電磁電流和低懸浮能耗的優越特性[7-8];有學者針對混合懸浮系統建立了系統的數學模型,分析其性質,并采用滑模控制達到了良好的控制效果[9-10];有學者建立了磁懸浮列車制動系統模型,通過Matlab仿真結果表明選用“外環采用速度反饋,內環采用減速度反饋”的控制器能夠達到理想的制動效果[11];還有一些學者采用模糊控制的思想,仿真比較出模糊控制相比于傳統控制的優點,提出適用于磁懸浮系統的模糊自適應PID控制方法(IFPID)[12-13]。
針對磁懸浮系統實際控制時的復雜環境,有學者建立了磁懸浮列車運行控制系統的仿真環境,并介紹了利用工控機對磁懸浮列車機械制動系統進行控制時,控制系統的硬件配置和軟件流程[14-15]。
混合磁懸浮系統由電磁和永磁兩部分組成,電磁鐵的設計和控制是混合磁懸浮系統重要內容,但是,永磁體的設計對于整個系統能否穩定運行也至關重要。有學者對于永磁體的電磁感應強度與導體材料之間的關系做了一些研究[16]。Halbach陣列是1979年由美國著名學者Klaus Halbach針對永磁體的結構提出的一種新穎的設計方法,有學者介紹了Halbach永磁陣列的基本形式及其在磁懸浮列車中的應用現狀[17-18]。
這些文獻針對磁懸浮系統的研究都是針對分米級、厘米級氣隙間距的研究,都沒有涉及到米級氣隙間距下磁懸浮系統的設計和控制方法。而米級懸浮技術的研究可以推動磁懸浮技術在大氣隙下的應用,并且,通過米級懸浮技術的研究還可以反過來進一步推動分米級、厘米級懸浮技術的研究。在米級懸浮下,要使懸浮物體達到米級懸浮高度,需要足夠大的電磁力,通過多種設計方法的比較,在Halbach永磁陣列在基礎上,提出了陣列式電磁鐵的控制方法,并利用解耦理論和協調控制的思想,采用模糊控制的方法[19],建立模糊規則,用專家經驗的方式對本文所提到的米級磁懸浮系統進行定點懸浮控制。
2 電磁-永磁混合懸浮系統的原理
2.1 單電磁-永磁混合懸浮系統的原理
在單電磁-永磁混合懸浮系統中,永磁鐵位于鐵心上方,它們與鐵心和線圈所構成的電磁鐵構成混合懸浮磁鐵,通過改變電磁鐵的電流大小,可以調節懸浮物體與電磁鐵之間的磁力,從而控制懸浮物體進行運動。單電磁–永磁混合懸浮系統的基本結構如圖1所示。

圖1 單電磁-永磁混合懸浮系統的結構Fig.1 The structure of uni-permanent magnet hybrid suspension system
2.2 陣列式電磁-永磁混合懸浮系統的原理
陣列式電磁-永磁混合懸浮系統的永磁鐵與單電磁-永磁混合懸浮系統的永磁體布局一致,區別在于,位于底部的電磁鐵采用的是電磁鐵陣,通過改變電磁鐵陣中各個電磁鐵的電流大小,可以控制懸浮物體在三維方向上的受力大小,從而控制懸浮物體進行運動,陣列式電磁–永磁混合懸浮系統的基本結構如圖2所示。
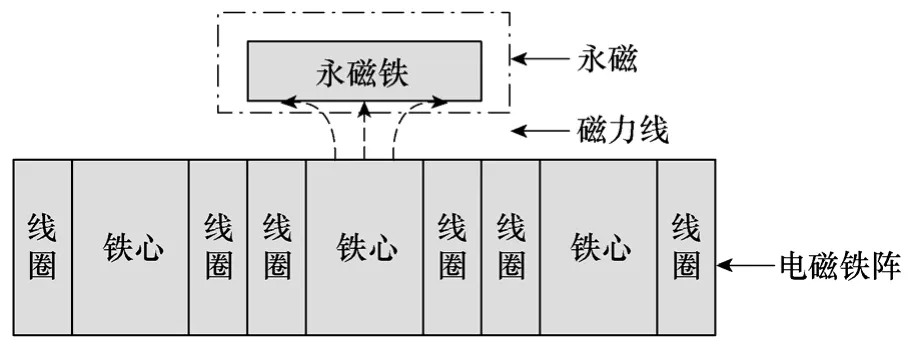
圖2 陣列式電磁-永磁混合懸浮系統的結構Fig.2 The structure of electromagnetic array-permanent magnet hybrid suspension system
單電磁-永磁混合懸浮系統可以比較容易的實現懸浮物體的高度控制,而比較難于實現懸浮物體的三維運動控制。為了解決這一問題,給出了兩種控制思想:
(1)通過增加電磁鐵數量的方法,將底面電磁鐵變成陣列式電磁鐵,并在側面增加兩個電磁鐵,用于控制懸浮物體的水平方向的運動,由此,提出了“陣列式電磁-永磁混合懸浮系統的四單元式”三維運動模糊PID控制方法。
(2)通過增加電磁鐵數量的方法,將底面電磁鐵變成陣列式電磁鐵,不需要側面電磁鐵,僅靠底面陣列式電磁鐵來實現懸浮物體的三位運動,由于這種控制方法在米級懸浮下的實現比較困難,本文只給出了定點懸浮的思想,即“陣列式電磁-永磁混合懸浮系統的九單元式”定點懸浮模糊控制方法。
2.3 實驗中懸浮物體的模型
實驗中,懸浮物體為正方體形狀,永磁鐵固定在懸浮物體的底面,由于懸浮物體采用浮力的方式克服了一部分重力,因此,大大減小了電磁鐵的通電電流。懸浮物體的浮力和重力差值為8N。具體的懸浮物體結構圖如圖3所示。

圖3 懸浮物體結構圖Fig.3 The structure of suspension object
2.4 實驗中整個系統的工作原理
實驗中,電磁-永磁混合懸浮系統控制原理圖如圖4所示。

圖4 電磁-永磁混合懸浮系統的控制原理圖Fig.4 The control schematic of electromagnetic-permanent magnet hybrid suspension system
其中,位置檢測用來檢測懸浮物體的位置信息;計算機接收到位置信號后,計算出九個電磁鐵所需電流;然后,將電流對應的信號輸出給電源;電源根據接收到的信號輸出電磁鐵所需要的電流。
3 模糊PID控制原理
在實驗中,由于該磁懸浮為米級懸浮,磁懸浮系統的測量、磁場建立和電流的反應等都需要較長的時間,采用通常的控制很難達到精確控制,因此,這里采用模糊PID的控制方法。
3.1 模糊控制器的設計步驟
模糊控制器主要由四步組成,具體步驟如下:
(1)精確量的模糊化。
(2)制定模糊控制器的控制規則。
(3)確定模糊推理方式。
(4)選擇輸出量的解模糊方式。
3.2 模糊PID設計
模糊PID控制的主要任務是找出PID的三個參數與誤差e(設實際的誤差為e,模糊化后的誤差為E)和誤差變化 ec(設實際的誤差變化為 ec,模糊化后的誤差變化為EC)之間的模糊關系,在運行中不斷檢測e和ec,根據確定的模糊控制規則來對三個參數進行在線調整。
根據工程中調節PID參數的經驗,可以得出如下的模糊PID參數調整原則:①誤差E較大時,為加快系統響應速度,應取較大的Kp(Kp為去模糊化前的比例系數);同時,為避免由于開始時e的瞬時變大可能出現的微分過飽和而使控制作用超出許可范圍,應取較小的 Kd(Kd為去模糊化前的微分系數);為防止出現較大超調,產生積分飽和,應對積分加以限制,取Ki(Ki為去模糊化前的積分系數)為零。②|E|和|EC|處于中等大小時,為使系統具有較小的超調,Kp應取小一些,Ki取值要適當,Kd要大小適中,以保證系統響應速度。③當|E|較小,即接近設定值時,為使系統有良好的穩態性能,應增加Kp、Ki取值;同時,為避免系統在設定值附近出現振蕩,并考慮系統抗干擾性能,當|E|較大時,Kd可取小一些;|EC|較小時,Kd取大一些。
選擇誤差e和誤差變化ec作為輸入語言變量,對這兩個變量均取{NB,NM,NS,O,PS,PM,PB}七個模糊值,則根據上述調整原則,可以建立相應的模糊規則。表1、表2和表3分別給出了比例系數的變化量Δkp、積分系數的變化量Δki和微分系數的變化量Δkd的模糊規則表。

表1 Δkp的模糊規則表Tab.1 Fuzzy rule table of Δkp

表2 Δki的模糊規則表Tab.2 Fuzzy rule table of Δki

表3 Δkd的模糊規則表Tab.3 Fuzzy rule table of Δkd
根據模糊規則表,可以對去模糊化后的比例系數kp、去模糊化后的積分系數ki和去模糊化后的微分系數kd進行動態整定:設 kp′、 ki′、dk′為采用常規整定方法得到的 PID參數值(是一個固定值),選擇適當的模糊化和去模糊化方法,則模糊PID參數為:kp= kp′+Δkp,ki=ki′+Δki,kd=dk′+Δkd。
在模糊 PID控制中,誤差的比例因子 AE、誤差變化的比例因子 AEC、比例系數的比例因子AKP、積分系數的比例因子AKI和微分系數的比例因子 AKD的選取對模糊控制系統的動靜態性能有較大影響。因此,需要不斷實驗,對比實驗結果,以獲得最優的比例因子。
4 陣列式電磁-永磁混合懸浮系統的四單元式三維運動模糊PID控制方法
陣列式電磁-永磁混合懸浮系統的底部是由共3×3的方形單元電磁鐵(記為 1~9號電磁鐵)組成的電磁鐵陣,分為一號、二號、三號、四號四個區間,陣列式電磁-永磁混合懸浮系統的四單元式電磁鐵布局圖如圖5所示。

圖5 四單元式電磁鐵布局圖(俯視圖)Fig.5 Four-cell-type solenoid layout (top view)
當懸浮物體在某區間運動時,只有屬于該區間的四個電磁鐵是工作的;10號電磁鐵代表控制x方向的側向電磁鐵,11號電磁鐵代表控制z方向的側向電磁鐵。其中,1~9號電磁鐵不需要進行反向控制,10號和11號電磁鐵需要進行反向控制。
側面的10號和11號電磁鐵在整個控制過程中一直處于工作狀態,而1~9號電磁鐵的開通與關斷則由懸浮物體的水平(x、z)位置來決定:假設陣列式電磁鐵所處的位置坐標如圖5所示,3×3的陣列式電磁鐵占用了1000 mm×1000 mm的場地,則電磁鐵區間選擇流程圖如圖6所示。
垂直方向y的控制方式如下:首先,根據y方向的實際位置和設定位置,運用模糊PID控制方法計算出y方向所需要輸出的控制信號的大小;然后,根據懸浮物體x、z的位置,決定打開哪幾個電磁鐵;最后,給相應的電磁鐵通y方向控制信號所對應的電流,其他電磁鐵不輸出電流。
水平方向x(z)的控制方式如下:首先,根據x(z)方向的實際位置和設定位置,運用模糊 PID控制方法計算出x(z)方向所需要輸出的控制信號的大小;然后,給11(10)號通x(z)方向控制信號所對應的電流。
陣列式電磁-永磁混合懸浮系統的四單元式模糊PID控制流程圖如圖7所示。

圖6 電磁鐵區間選擇流程圖Fig.6 Solenoid interval selection flow chart

圖7 四單元式模糊PID控制流程圖Fig.7 Four-cell-type fuzzy PID control flow
5 陣列式電磁-永磁混合懸浮系統的九單元式定點懸浮模糊控制方法
九單元式定點懸浮模糊控制方法只采用底部陣列式電磁鐵,不需要側面電磁鐵,電磁鐵布局圖如圖8所示。

圖8 九單元式電磁鐵布局圖(俯視圖)Fig.8 Nine-cell-type solenoid layout(top view)
由于電磁場的非線性和難于分析性,在懸浮物體上升和下降這兩個階段,要使懸浮物體穩定在某一點所需要的電流具有很大的差異,一般而言,在相同的高度處,下降時需要的電流要比上升時所需要的電流大得多,而且,在大部分高度下,這一差別可以達到十倍之多。因此,鑒于上升和下降階段的嚴重不對稱性,如果采用常規的PID方式進行控制顯然是行不通的;而如果能夠摸索出對應于不同高度時,九個電磁鐵分別所需要的電流,并對這個經驗庫不斷進行修正,則可以僅采用底面陣列式很好的實現定點懸浮。
陣列式電磁-永磁混合懸浮系統的九單元式定點懸浮模糊控制思想如圖9所示。
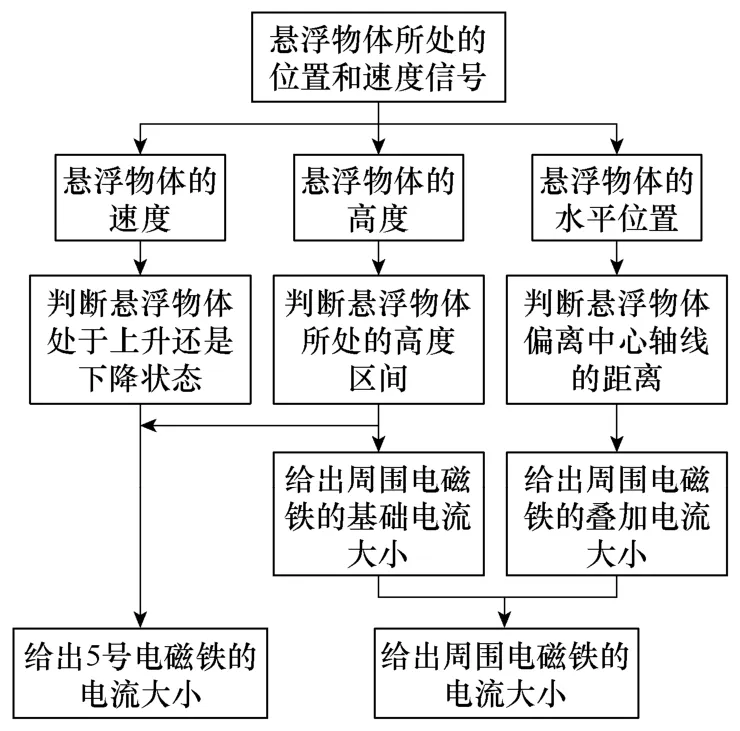
圖9 九單元式定點懸浮模糊控制思想Fig.9 Fuzzy control theory for fix-point suspension of nine-cell-type electromagnet array
6 實驗結果
由于實際測試時硬件的原因,四單元式的三維運動控制沒有進行實驗測試,只對采用陣列式電磁—永磁混合懸浮系統的九單元式定點懸浮模糊控制方法進行了相應的實驗測試。
在期望懸浮高度為400 mm(即y軸的目標位置為400 mm),期望水平位置為(1150 mm,1150 mm)(即x軸、z軸的目標位置均為1150 mm)的情況下,采用九單元式定點懸浮模糊控制方法所得到的控制效果如圖10、圖11和圖12所示。圖10給出了x軸的控制效果圖,懸浮物體在x軸的運動曲線基本穩定在1150 mm處;圖12給出了z軸的控制效果圖,懸浮物體在 z軸的運動曲線基本穩定在 1150 mm處;圖11給出了y軸的控制效果圖,懸浮物體在y軸的運動曲線在400 mm上下小幅振蕩。

圖10 x軸的控制效果圖Fig.10 Control effect drawing of x-axis

圖11 y軸(垂直方向)的控制效果圖Fig.11 Control effect drawing of y-axis(vertial direction)
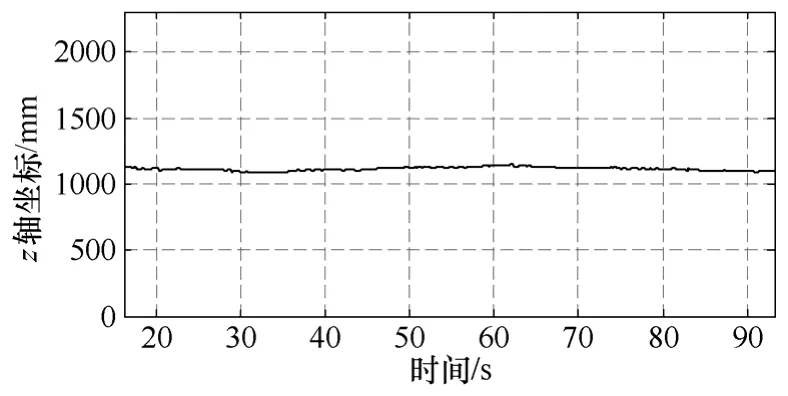
圖12 z軸的控制效果圖Fig.12 Control effect drawing of z-axis
從圖中可以發現:利用九單元式定點懸浮模糊控制方法,可以很好的使懸浮物體在水平方向上保持在5號電磁鐵的中心周線上,同時,利用模糊經驗,垂直方向上也能夠在某一較小的區域內上下波動,達到一定范圍的穩定。如果繼續擴展模糊規則庫,我們相信控制效果會更好。
7 結論
針對米級懸浮下的定點懸浮,采用模糊控制的方法進行控制,取得了較好的定點懸浮效果。實驗結果表明,通過增加電磁鐵的單元數,我們可以實現懸浮物體的三維運動。
由于對象數學模型具有不確定性,因此,采用了模糊控制的控制策略。通過細分高度的方法,探索了大量的模糊控制規則,然而,由于時間比較緊迫、模糊規則的探索比較困難,模糊控制規則的探索還不夠深入、模糊規則庫的建立還不夠完善,而且,與厘米級懸浮相比,米級懸浮下的實驗設備的精度并不是很高,磁場、電流等的建立都需要一定的時間,因此,懸浮物體的穩定精度還不很理想。在后面的研究中,會深入摸索模糊規則,努力完善模糊規則庫,同時,加入預測控制,努力減小延時,提高系統的精度。
[1]呂梁, 樊樹江, 吳峻.中低速磁懸浮列車牽引控制系統的設計[J].電氣傳動自動化, 2006, 28(4):22-24.Lü Liang, Fan Shujiang, Wu Jun.Low-speed maglev train in the actual traction control system[J].Electricl Drive Automation, 2006,28 (4) : 22-24.
[2]劉德生, 尹力明, 佘龍華.Fuzzy-PID控制算法在磁懸浮系統中的應用[J].計算機測量與控制, 2002,10(6): 375-377.Liu Dengsheng, Yin Liming, She Longhua.Application of fuzzy-PID algorithm in maglev system[J].Computer Measurement & Control , 2002,10(6): 375-377.
[3]徐紹輝, 徐正國, 等.電磁永磁混合懸浮系統的神經元PID控制[J].電力電子技術, 2006, 40(4): 12-13.Xu Shaohui, Xu Zhengguo,et al.PM hybrid electromagnetic suspension system neuron PID control[J].Power Electronics, 2006,40 (4) :12-13.
[4]張秋生, 劉楹, 等.自動滑壓控制在協調控制系統中的實現[J].河北電力技術, 2006, 25(4): 14-15.Zhang Qiusheng, Liu Ying, et al.Automatic sliding pressure control in the coordination of the control system implementation[J].Hebei Electric Power, 2006,25(4): 14-15.
[5]Liu Sheng, Li Yanyan.Application of a compound controller based on fuzzy control and support vector machine to ship's boiler-turbine coordinated control system[J].J.Marine.Sci.Appl , 2009(8): 33-39.
[6]王莉, 熊劍, 張昆侖, 等.永磁和電磁構成的混合式懸浮系統研究[J].鐵道學報, 2005(3): 50-54.Wang Li, Xiong Jian, Zhang Kunlun, et al.Constitute a permanent magnet and hybrid electromagnetic suspension system[J].Joaranl of the China Railway Society, 2005 (3): 50-54.
[7]徐紹輝, 徐正國, 金能強, 等.電磁永磁混合懸浮系統的建模仿真與實驗[J].遼寧工程技術大學學報,2006, 25(4):553-555.Xu Shaohui, Xu Zhengguo, Jin Nengqiang,et al.Modeling simulation and experiments for the hybrid maglev system[J].Journal of Liaoning Technical University, 2006,25(4): 553-555.
[8]李云鋼, 程虎, 張鼎.EMS型電磁永磁混合懸浮控制問題[C].第24屆中國控制會議, 2005: 15-18.
[9]常蕾, 游小杰, 楊中平.電磁永磁混合懸浮系統的滑模控制器設計[J].微計算機信息, 2009, 25(4): 24-26.Chang Lei, You Xiaojie, Yang Zhongping.The design of sliding mode controllor of hybrid magnetic levitation systems[J].Control & Automation, 2009,25(4): 24-26.
[10]張博, 駱力, 黃愛民.中低速磁懸浮列車電制動系統的仿真[J].計算機仿真, 2006, 23(5): 238-241.Zhang Bo, Luo Li, Huang Aimin.Low-speed maglev train braking system simulation[J].Computer Simulation,2006, 23 (5) :238-241.
[11]朱順利, 吳莉, 李明.基于模糊控制的磁懸浮系統及其仿真[J].兵工自動化, 2007, 26(10): 24-26.Zhu Shunli, Wu Li, Li Ming.Maglev system and simulation based on fuzzy control[J].Ordnance Industry Automation, 2007, 26(10): 24-26.
[12]張靜, 徐林.磁懸浮系統的模糊自適應PID控制[J].計算機應用, 2009, 29(z1): 329-334.Zhang Jing, Xu Lin.Fuzzy adaptive PID control in magnetic levitation system[J].Journal of Computer Applications, 29(z1): 329-334.
[13]趙宇, 尹力明, 趙志蘇.基于工控機的常導中低速磁懸浮列車機械制動控制系統[J].電氣傳動, 2006,36(4): 47-49.Zhao Yu, Yin Liming, Zhao Zhisu.IPC-based lowspeed maglev train in the normal conducting mechanical brake control system[J].Electric Drive, 2006,36(4): 47-49.
[14]徐家鎮, 徐洪澤.磁懸浮列車運行控制系統仿真環境研究[J].微型機與應用, 2005(12): 44-46.Xu Jiazhen, Xu Hongze.Simulation of the environment of maglev train control system[J].Microcomputer & Its Applications, 2005(12): 44-46.
[15]李貞融.電磁感應與磁懸浮力實驗的設計[J].物理實驗, 2008, 28(6):34-37 Li Zhenrong.Experimental design of electromagnetic induction and magnetic suspension[J].Physics Experimentation, 2008, 28(6):34-37
[16]仉毅.Halbach磁陣列在微細加工平臺中的應用研究[J].機床與液壓, 2008, 36(4): 29-31.Zhang Yi.Application and research of halbach magnetic array in the minuteness machining stage[J].Machine Tool& Hydraulics, 2008, 36(4): 29-31.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32