某型號衛星桌面聯試平臺數據接口研究
2011-07-18 03:36:50馬玉海陳雪芹耿云海蘭盛昌
哈爾濱工業大學學報 2011年9期
馬玉海,陳雪芹,耿云海,蘭盛昌,潘 瑞
(哈爾濱工業大學衛星技術研究所,150080哈爾濱,cxqhit@163.com)
某型號衛星桌面聯試平臺數據接口研究
馬玉海,陳雪芹,耿云海,蘭盛昌,潘 瑞
(哈爾濱工業大學衛星技術研究所,150080哈爾濱,cxqhit@163.com)
對某型號衛星桌面聯試平臺中的數據接口設計與實現進行研究.首先,結合工程需求設計以實時仿真機和星載計算機為中心的桌面聯試平臺總體結構,并描述平臺中各部件之間的接口關系.然后,針對平臺中實時仿真機的組成、xPC Target接口編程,接口采樣時間,雙精度浮點數的接口編碼以及CAN總線應用層協議的制定等問題進行研究.最后,通過測試分析驗證數據接口方案的有效性與實用性.
衛星;桌面聯試;數據接口;實時仿真機;星載計算機
在衛星型號研制過程中,對星上所有設備進行桌面電性能聯接調試是必不可少的步驟.衛星桌面聯試可以初步驗證衛星各功能部件的電氣特性和數據接口是否兼容,以及整體設計能否完成任務需求,為型號研制的后續工作展開提供基礎.從某種程度上講,所謂的聯接測試平臺,就是為構成桌面聯試系統,聯接起各種星上設備的一系列接口的集合.
衛星桌面聯試所涉及的設備、單位和人員較多,常規的桌面聯試常常占用較大的工作量和較長的研制時間.為了縮短衛星研制周期,實現衛星研制任務快速響應,滿足低成本的新需求、新理念,有必要構建一種具有高可靠性和可擴展性且開發周期短的衛星桌面聯接測試平臺,進行整星的調試與研制;同時也可以通過調整測試平臺的實時仿真組件,適應性地形成不同的仿真回路,實現對衛星各分系統設備的獨立調試[1-2].
數據接口的實現是設計高效的聯接測試平臺的關鍵.解決了各分系統部件之間的數據接口問題,衛星的研制就得以按功能劃分為各個模塊,各分系統研制團隊通過遵循統一的數據接口規范,構建功能相對獨立的模塊,從而使研制任務的分配清晰明了、整星與各分系統任務規模減小、成本降低、整星的研制效率提高.同時,已開發成熟的模型和程序等通過適應數據接口規范,可以繼承性地應用到新的任務中去,大大縮短后續型號的研制周期.
本文針對某型號衛星桌面聯試平臺系統的體系結構方案及其主要組成進行詳細描述,對實時仿真機的組建、xPC Target接口編程,接口采樣時間,雙精度浮點數的接口編碼以及CAN總線應用層協議的制定等關鍵問題進行分析與設計,并通過設計的地面控制臺發送指令并接收數據,對桌面聯試平臺系統及其數據接口設計進行測試分析,檢驗數據接口解決方案的有效性、實用性.
1 桌面聯試平臺體系結構
典型的衛星桌面聯試系統由實時仿真計算機(仿真機)、地面控制臺、星載計算機(星載機)和其它星上部件/設備組成[1-4].桌面聯試過程可以對尚未研制完成的設備、不便實現的動力學過程、以及難以獲得的環境因素建立數學模型,生成可在仿真機中運行的實時目標代碼,以模擬真實運行情境的輸入和響應.
在星載機中運行真實的星上控制程序,通過地面控制臺發送指令并接收數據,對桌面聯試平臺系統與各數據接口進行測試分析完成桌面聯試.因此,為實現某型號衛星的桌面聯試,設計桌面聯試平臺體系結構如圖1所示,主要由3部分組成.
1)xPC實時仿真機.基于PC/104構建并配置有多種外部接口,用于運行xPC Target實時目標代碼,模擬星載機外部的設備環境.
2)地面控制臺.基于PC機構建并配置多種功能軟件及外設接口,用于衛星地面站的模擬及執行仿真過程中的監視與控制.使用MATLAB/Simulink及Visual C++構建xPC Target實時目標編譯環境,在調試過程中可實現實時目標的編譯、下載、修改及監視;Xilinx Platform Studio(XPS)完成對星載計算機中FPGA嵌入式內核及星載計算機程序注入;用Visual C++編寫Windows串口操作界面作地面控制臺,按星地指令協議向PCI串口板寫入地面指令和接收下行數據.
3)待測星上設備.包括星載計算機、GPS接收機、信號處理單元、數據處理器、測控應答機以及有效載荷中央電子設備等.

圖1 某型號衛星桌面聯試平臺體系結構
圖1中所示各設備間的接口關系為:待測星上設備及其與仿真機之間統一采用CAN總線聯接,CANcaseXL總線分析儀用于監測調試.仿真機內部主模塊與各接口板間用PC/104PLUS總線聯接.仿真機與地面控制臺之間采用無線通信鏈路,用藍牙串口模塊BlueRS+E實現.仿真機中的實時目標代碼可經局域網電纜或無線局域網通過TCP/IP方式由PC機上注,并可在調試完畢后,通過配置xPC Target Embedded Option以StandAlone模式固化,隨仿真機啟動運行;星載機中FPGA的BITSTREAM文件從PC機上的開發平臺軟件通過USB接口上注,并在調試完畢后可進行固化,隨上電自主運行.
桌面聯試平臺的核心設備有:
1)PC/104實時仿真機.PC/104是通過改造成熟的 PC架構形成的工業控制計算機,PC/104PLUS支持 PCI BUS.基于PC/104PLUS組建實時仿真機具有穩定性高、速度快、可擴展性好、接口豐富、體積小巧、開發便捷等特點,適于桌面聯試及基于氣浮臺的半物理仿真[2- 3,5].
本測試平臺選用PC/104PLUS智能嵌入式計算機DIGITAL-LOGIC MSM855作為主模塊,配置Diamond Emerald-MM8串口通訊板及 Softing CAN-AC2-104 CAN通訊板,擴展了8路串行接口和2路CAN接口.主模塊與通訊板間通過緊湊的堆棧式聯接成為1個整體設備.值得一提的是,MATLAB/Simulink xPC Target提供了對這些接口通訊硬件產品的支持,可以方便地實現對接口的操作.
2)星載計算機.星載計算機以FPGA為核心集成CAN接口,在快速動態可重構技術的基礎上可按控制功能的要求改變計算機構架,使計算機系統結構與控制過程相匹配,從而獲得優良的系統性能,也稱為可重構星載計算機.其功能結構主要包括處理器單元、配置模塊單元、射頻模塊.
桌面聯試中,在星載計算機中運行真實的星上控制程序,并通過CAN總線完成敏感器的數據采集及執行機構的控制輸出(敏感器和執行機構可以采用數學模型或者實物),與仿真機及其他星上設備樣機構成仿真回路[4].
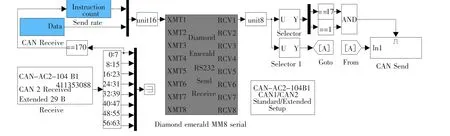
圖2 實時仿真機接口設計
2 桌面聯試平臺接口設計
本測試平臺采用的實時仿真機接口硬件產品受xPC Target支持,因而參照軟件提供的說明文檔,可以清楚地了解接口編程的基本操作[6].然而,實際使用中必須對仿真機接口、采樣時間、數據格式與接口編碼以及總線協議等進行詳細設計,以建立完整的桌面聯試平臺.
2.1 實時仿真機接口設計
如圖 2所示,采用 MATLAB/Simulink xPC Target進行仿真機的接口設計,其中Diamond Emerald-MM8 Serial為串口板驅動模塊,CAN-AC2-104 Setup為CAN通訊板配置模塊[7].RCV1處接收由藍牙串口模塊傳送來的模擬地面控制指令,進行數據分流后,分為協議部分和數據部分.XMT1處的數據來自于發送控制時序生成模塊Send Rate及CAN總線數據接收模塊 CAN Receive,經串口板由藍牙串口模塊傳送回模擬地面控制臺.
圖2中的數據鏈路可描述為:右側RCV1→CAN Send代表衛星指令接收裝置,接收到地面遙控指令后,根據星地指令協議向星載機發送指令;星載機根據星務管理協議判斷該指令對應的設備及操作,例如向有效載荷中央電子設備發送遙測數據下行指令;左側Receive~XMT1代表中央電子設備,接收到遙測數據下行指令后按協議解析,控制遙測數據按時序發送,直到下行允許指令被復位.
2.2 實時仿真中的采樣時間問題
與數學仿真不同,仿真機中的xPC Target實時目標需要采用定步長的數值積分解算器,以定步長運行[8].為保證仿真測試效果,應選取較小的積分步長.接口操作受波特率及接收端處理能力的限制,發送數據時不能采用過小的采樣時間;而接收數據希望實時性好,宜采用小的采樣時間.因此,必須解決接口配置模塊收發采樣時間要求不一致的問題[3].
Emerald-MM8串口板驅動模塊的Transmit Setup中可設置發送緩沖區數據格式帶有待發送數據長度count.通過產生控制時序動態修改count值,(count為0時不發送數據)可實現在保持配置模塊較小采樣周期的前提下使發送周期加長.
圖2中Send Rate模塊的實現如圖3所示,采樣周期為0.05 s.設置模塊Pulse Generator中的周期參數為1 s,脈沖寬度為5%,相位延遲為1 s,生成的時序波形如圖4所示.指令信號為真時,每1 s內只有第1個采樣周期允許發送71 B遙測數據,指令信號為假時,不允許發送數據.
2.3 數據類型與接口編碼
聯試平臺中收發的數據類型包括整型和浮點型.整型數據用于描述開關指令,計數值等;浮點數用于表示精確時間、姿態參數、某些控制指令以及遙測數據等信息.IEEE754雙精度浮點數是標準的浮點數格式,如何將其通過接口或總線進行精確、高效的收發是數據接口設計的關鍵.

圖3 控制時序生成模塊圖
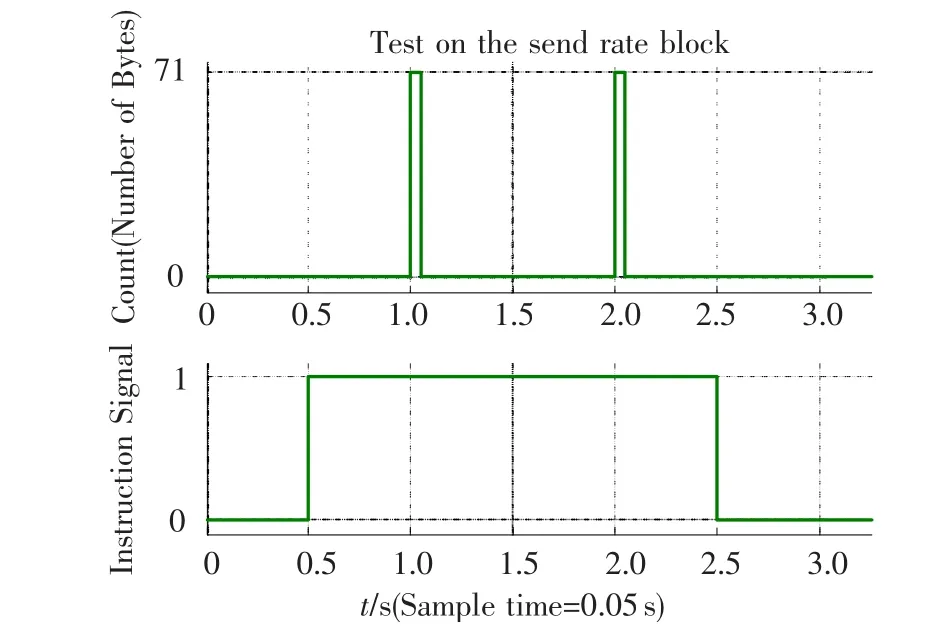
圖4 控制時序波形
MATLAB/Simulink不方便進行數位、內存以及接口編碼等操作,考慮用C語言編寫 S-Function,實現對浮點數的收發[3].其中 mdlOutputs函數中關鍵的代碼如下:
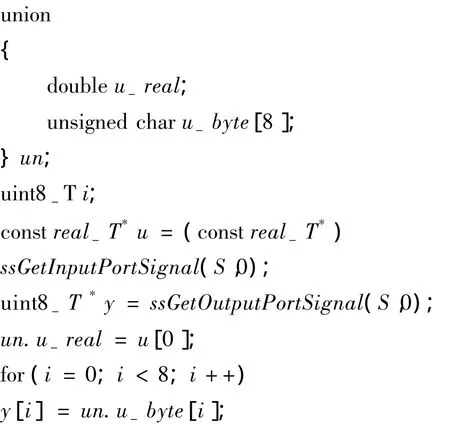
64位浮點數和8 B無符號整型字面值通過聯合體共享內存,可實現雙向轉換[9];S-Function的唯一參數用于設定采樣時間.這種方法無須進行算術及移位運算,效率高,傳輸精確,星載計算機解碼方便.利用封裝模塊對雙精度浮點數-3.141 592 653 589 8(十六進制字面值C00921FB54442D28)進行自發自收的效果如圖5.

圖5 接口編碼模塊收發浮點數
2.4 CAN總線應用層協議的制定
控制器局域網(Controller Area Network,CAN)總線是近年來通過對工業現場總線標準進行改造,應用到航天領域的總線;具有可靠性高、速度快、總線操作方便等優點[10].本聯試平臺采用PC/104實時仿真機,以較低的成本擴展了CAN總線接口板.制定CAN總線應用層通信協議即為不同設備分配滿足其功能需求的報文識別碼(幀ID).
CAN總線擴展幀ID所在的字節如表1.可見,由于ID尾部未填滿整字節,從協議字面信息不容易得到有意義的ID值.而在編程、監視過程中,要大量使用ID值.因此,使用Visual C++設計CAN擴展幀ID計算器如圖6.
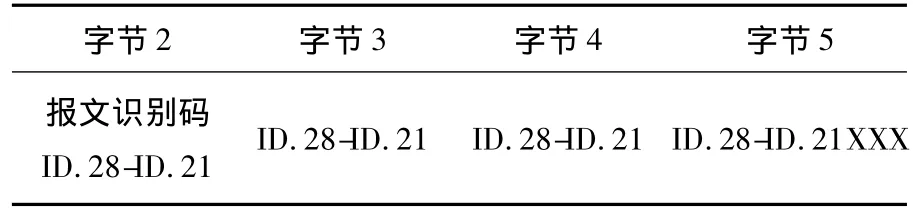
表1 CAN總線擴展幀幀信息局部字節表

圖6 CAN總線擴展幀ID計算器
其核心程序段如下:


通過共同體共享內存,并用位段方式占據末5個不整字節數位,簡捷地達到了換算效果.
3 桌面聯試平臺測試分析
測試過程分為4個階段,分別如下.
1)準備階段.包括各設備電氣聯接,加電;程序的上注、運行;模擬地面控制臺端口打開,監視軟件啟動、初始化.
BlueRS+E藍牙串口模塊按說明配對后,加電即可工作;注意使用時讀寫串口的參數要與配對時一致.模擬地面控制臺是采用Visual C++在PC機上開發的串口操作界面程序,如圖7.針對聯接測試中制定的星地指令協議編寫,可以方便地點選發送給定含義的指令,或讀取文本文件中的指令序列自動定時發送,以及接收下行數據.該程序通過對串口操作,經藍牙串口模塊與仿真機間構成模擬無線星地數據鏈路.CANcaseXL總線分析儀通過USB電纜聯接到PC機,安裝驅動程序后,可由專用的CANalyzer軟件監視、分析總線活動,程序界面如圖8.

圖7 衛星地面控制臺界面
2)通過模擬地面控制臺,手動發送若干測試指令,查看監視及應答結果.
發送指令序號為 01,指令內容全為 00,經藍牙串口模塊無線傳輸到仿真機后,由圖2中RCV1→CAN Send部分解析,在2通道CAN總線上向星載計算機發送ID為8414000x的一幀,如圖8中第1行數據所示.由第2行數據可見,星載計算機接下來在1通道CAN總線上向相應設備發送了ID為1C814000x的一幀.第3行到第6行數據運行原理相同,但定義為不同功能含義.

圖8 CAN總線數據監測圖
3)通過模擬地面控制臺,讀取指令序列文件定時發送,查看監視及應答結果.
指令序號為0 B,指令內容來自預先寫好的指令序列文件,定時間隔500 ms發送一行.實時仿真機解析后在2通道CAN總線上向星載計算機發送ID為844E000x的四幀,文件內容發送完畢,如圖8.從對應的下一行可見星載計算機接下來在1通道CAN總線上向相應設備發送ID為1884E000x的一幀,并在數據域轉發了指令文件內容.
4)測試通過發送指令,控制星上遙測數據下行.
用CANalyzer設置定時觸發節點,總線啟動后模擬星上遙測設備定時1 ms向圖2中CAN Reveive模塊所含的9個ID相應發送9幀數據一次,如圖9中前九行數據.模擬地面控制臺發送數據下行指令后,星載機向中央電子設備發送數據下行允許指令幀,如圖9中第十行數據.圖2中判斷Send Rate指令為真,模擬地面控制臺接收數據區域觀察到下行數據(71 B),并間隔1 s更新,可見與圖9中標記的數據吻合.(204=CCh,255=FFh,末字節未傳送).模擬地面控制臺發送數據下行停止指令后,星載機向中央電子設備發送數據下行停止指令幀,如圖9中第11行數據.圖2中解析協議的邏輯部分輸出到Send Rate的指令為假,從模擬地面控制臺觀察到下行數據更新停止,測試完畢.由指令、數據傳輸測試結果,可見各接口協議、編程正確,數據鏈路通暢,傳輸無誤,時間間隔準確.
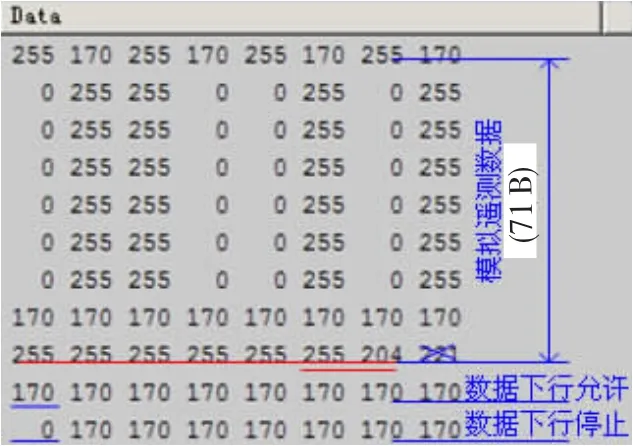
圖9 控制遙測數據下行監測圖
4 結論
本文討論了衛星桌面聯試平臺構建工作中有關數據接口的問題.描述了如何基于PC/104構建接口豐富的實時仿真機,并利用MATLAB/Simulink xPC Target對其進行接口編程.利用CAN總線、串口、BlueRS+E藍牙串口模塊等接口方式,完成了一種衛星桌面聯試平臺數據接口解決方案.在此過程中解決了實時仿真中接口的采樣時間,雙精度浮點數的接口編碼,以及CAN總線應用層協議的制定問題.最后,通過數據傳輸測試證明了數據接口解決方案的有效性、實用性.
[1]王峰,曹喜濱,邱文勛,等.小衛星控制系統半物理仿真驗證平臺[J].哈爾濱工業大學學報, 2008,40(11):1681-1685.
[2]KIM B,VELENIS E,KRIENGSIRI P,et al.Designing a low-cost spacecraft simulator[J].IEEE Control Systems Magazine, 2003,23(4):26-37.
[3]楊正賢,孔憲仁,王繼河,等.基于xPC的小衛星半物理仿真驗證平臺[J].系統仿真學報, 2009,21(20):6444-6448.
[4]王繼河,王峰,施梨,等.基于dSPACE的微型核仿真驗證系統[J].系統工程與電子技術, 2007,29(12):2149-2153.
[5]PC-104 Consortium.PC/104(PLUS)Specifications[B/OL]. http://www.pc104.org/.
[6]MathWorks Inc.MATLAB/SIMULINK RS232 Diamond emerald MM8 help document[R].Natick:The Math-Works,Inc.2007.
[7]MathWorks Inc.MATLAB/SIMULINK CAN Softing CANAC2-104 SJA1000 Help Document[R].Natick:The Math-Works,Inc.2007.
[8]MathWorks Inc.MATLAB/SIMULINK xPC Target Help Document[R].Natick:The MathWorks,Inc.2007.
[9]王力.科學計算程序語言的浮點數機制研究[J].計算機科學, 2008,35(4):285-291.
[10]劉淑芬,孫昕.CAN總線在衛星中的應用技術研究[J].航天控制, 2004,22(6):79-83.
Research on data interfaces in desktop testing platform for a certain satellite
MA Yu-hai,CHEN Xue-qin,GENG Yun-hai,LAN Sheng-chang,PAN Rui
(Research Center of Satellite Technology,Harbin Institute of Technology,150080 Harbin,China,cxqhit@163.com)
Research on design and implementation of data interfaces in the desktop testing platform for a certain satellite was introduced in this paper.Firstly,to satisfy the engineering requirements,general structure of the platform was designed with the real-time simulator and the on-board computer as its core components,and the interfaces among various components in the platform was described.Then,topic focused on researching problems including constitution of the real-time simulator,programming on interfaces using xPC Target,sample time of the interfaces,encoding double precision floating point number for transmission through interfaces,and design of CAN bus protocol on the application layer.Finally,by analyzing results of the testing experiment,effectiveness and practicality of the data interfaces solution were proved.
satellite;desktop testing;data interface;real-time simulator;on-board computer
V422
A
0367-6234(2011)09-0025-05
2010-04-23.
國家自然科學基金資助項目( 60904051,61104026).
馬玉海(1988—),男,碩士研究生;
耿云海(1970—),男,教授,博士生導師.
(編輯 張 宏)
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
小學科學(學生版)(2021年7期)2021-07-28 06:44:42
趣味(數學)(2020年9期)2020-06-09 05:35:08
科技傳播(2019年22期)2020-01-14 03:06:34
科技傳播(2019年22期)2020-01-14 03:06:30
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
消費導刊(2017年20期)2018-01-03 06:26:40
電信科學(2016年10期)2016-11-23 05:11:56
衡陽師范學院學報(2015年3期)2015-02-10 06:02:23
