車載捷聯式三軸穩定平臺動力學建模與分析
2011-07-19 05:47:10滿益明江燕華胡玉文陳慧巖龔建偉丁祝順
哈爾濱工業大學學報 2011年9期
滿益明,江燕華,胡玉文,陳慧巖,龔建偉,丁祝順
(1.北京理工大學,智能車輛研究所,100081 北京,manyiming@163.com;2.北京航天控制儀器研究所,100854 北京)
車載捷聯式三軸穩定平臺動力學建模與分析
滿益明1,2,江燕華1,胡玉文1,陳慧巖1,龔建偉1,丁祝順2
(1.北京理工大學,智能車輛研究所,100081 北京,manyiming@163.com;2.北京航天控制儀器研究所,100854 北京)
為了獲得車載捷聯式三軸穩定平臺的耦合力矩特性,建立了穩定平臺系統的運動學與動力學模型.運動學模型分析結果表明,捷聯穩定方式與陀螺穩定方式的基本區別在于信息的獲取和控制方式,速率陀螺穩定是一種直接硬件補償方法,而捷聯穩定是一種軟件補償方法.動力學模型分析表明,車體與穩定平臺系統各框架和各框架間均存在非線性耦合力矩.系統耦合性試驗驗證了系統模型的有效性,且獲得了各框架耦合性大小的邊界范圍,為進一步研究車載捷聯式三軸穩定平臺系統性能提供了理論基礎.
捷聯穩定平臺;車載平臺;動力學;運動學
履帶式智能車輛在非結構環境下行駛時,復雜的地形將使車體的姿態變化更為劇烈.因缺乏環境的先驗信息,環境感知傳感器視線受到外界擾動后,獲取的信息即使處理后也很難真實反映外界行駛環境,其結果最終將降低履帶式智能車輛的行駛安全性和機動性.其次,相關技術的限制使常用環境感知傳感器不能提供類似于人眼的大范圍視野.當環境感知傳感器的視野受到地形遮擋等因素的影響時,獲取的環境信息不能滿足履帶式智能車輛安全性需求的概率將大大增加,嚴重威脅智能車輛的行駛安全.目前,陀螺穩定平臺因實現簡單且精度高,在智能車輛領域得到了廣泛應用[1-5].但是由于履帶式智能車輛頂裝甲板面積有限,且還需要安裝較多其他類型的傳感器以保證智能車輛的自主駕駛,而陀螺穩定平臺需要的安裝空間較大.
捷聯慣性導航信息的復用為智能車輛的導航定位、視線穩定和地圖構建等功能的一體化提供了可能.采用捷聯穩定平臺可實現履帶式智能車輛環境感知傳感器的視線穩定和動態視野.雖然捷聯穩定方式在機載[6]、彈載[7]、艦船[8]、火炮[9]等領域[10-12]的應用已初具規模,但是在智能車輛領域才剛剛起步,其原因和智能車輛復雜多變的使用環境密切相關.本文的工作為進一步開展履帶式智能車輛捷聯式視線穩定性能的研究提供了理論依據.
1 車載捷聯式三軸穩定平臺坐標系定義
車載捷聯式三軸穩定平臺采用方位-橫滾-俯仰3自由度萬向支架,外框為方位環,中框為橫滾環,內框為俯仰環.履帶式智能車輛的環境感知傳感器安裝在穩定平臺內框上,可以繞方位軸、橫滾軸和俯仰軸轉動,具有3個自由度.穩定平臺的慣性傳感器采用的是慣性測量單元,安裝在車體上,作為車體姿態的敏感元件,其輸出屬于導航坐標系.穩定平臺各框架的角位置信息由角位置傳感器測量給出,其輸出屬于穩定平臺的各個框架坐標系,同時車載捷聯式三軸穩定平臺系統還涉及車輛坐標系.為了方便問題討論,對穩定平臺各個框架和車體分別建立了坐標系,如圖1所示.
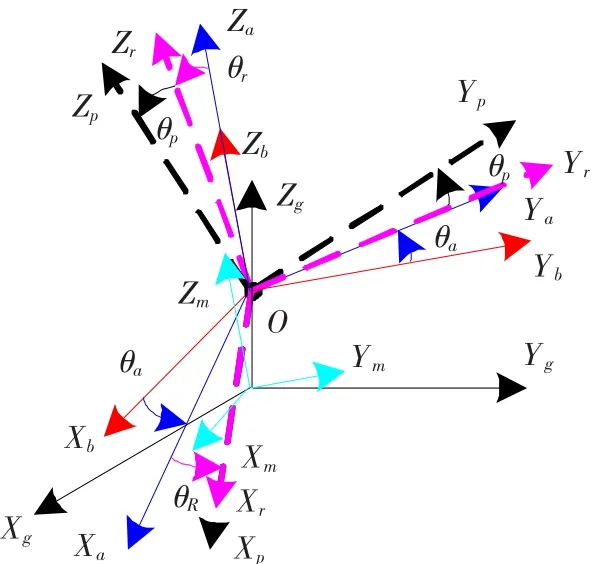
圖1 各坐標系間的幾何關系
圖中,Og-XgYgZg為東北天的導航坐標系,Om-XmYmZm為車體坐標系,原點取在車體重心處,O-XbYbZb為基座坐標系,與車體固連,Z方向距車體坐標系的距離為 Dmb,O -XaYaZa、O -XrYrZr、O-XpYpZp分別為外框,中框和內框坐標系.θa、θr、θp分別為穩定平臺的方位角、橫滾角和俯仰角.
2 框架運動學關系
根據框架結構和復合運動原理可知,內框運動是內框自身轉動與中框耦合運動的合成,中框運動是中框自身轉動與外框耦合運動的合成,而外框運動則是由外框自身轉動和基座運動共同引起的.因此,臺體上的環境感知傳感器視線運動由內框、中框、外框和基座運動合成得到.
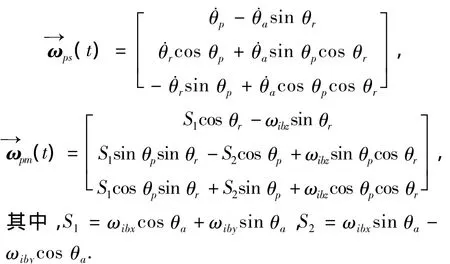
2.1 框架角速度
設基座與外框坐標系角速度矢量分別為
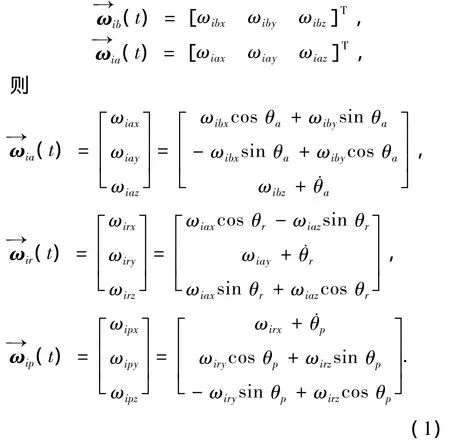
由式(1)可得,環境感知傳感器視線在導航坐標系下的角速度矢量為

2.2 框架角加速度
對上節各框架的角速度表達式求導,就可獲得車載捷聯式三軸穩定平臺系統的各框架角加速度表達式.對式(1)進行微分,得到各框的角加速度矢量為

由式(3)可以看出,除框架自身角加速度外,車體角速度和角加速度及框架角速度均會耦合到各框架,且中框和內框還存在框架間的角速度和角加速度的交叉耦合.
3 動力學模型與分析
為了簡化分析,本文中不考慮穩定平臺各部件間的彈性變形.將外框、中框和內框看作3個活動剛體,分別考慮每個框架的動力學模型,然后再對其進行綜合分析.
3.1 內框動力學模型
3.2 中框動力學模型
中框除受到中框驅動電機的軸向力矩外,還受到兩個相互垂直方向上的耦合力矩,分別作用于內框(與內框作用在中框的力矩互為反作用力矩)和外框.
3.3 外框動力學模型

4 試驗與分析
為了定量分析車體耦合與框架交叉耦合,本文設計了車載捷聯式三軸穩定平臺系統框架耦合性試驗.試驗時,對穩定平臺不同框架輸入不同的激勵,通過穩定平臺各框架實際輸出與理論輸入的對比對框架耦合性進行分析.
框架耦合性分析的輸入激勵為正弦波,其表達式為

其中,A為正弦波的幅值,f為正弦波的頻率,n為采樣數,ΔT為發送間隔時間,即采樣周期.
由于車載環境感知傳感器安裝在穩定平臺臺體之上,且內框的耦合性最大,因此下面將只詳細分析內框的耦合性,對于中框、外框的耦合性稍后將只給出結論.
由單個框架的角位置誤差曲線可以獲得穩定平臺該框架因車體的耦合力矩、不平衡力矩和摩擦力矩等所引起的誤差特性.當輸入激勵的振幅和頻率保持與單個框架運動時的輸入激勵一樣時,通過增加同時轉動框架的數量,即可獲得不同框架間耦合性的大小.圖2~5為正弦輸入激勵振幅為3°和5°,輸入頻率為1 Hz和2 Hz的4種不同組合下的耦合試驗結果.
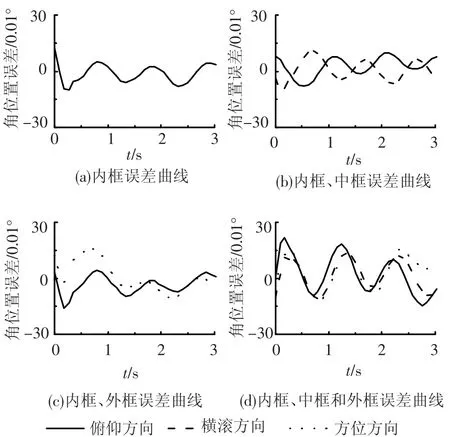
圖2 輸入幅值A=3°,頻率f=1 Hz正弦波時的框架耦合性誤差曲線
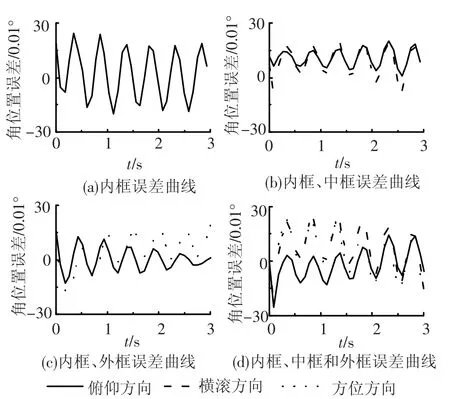
圖3 輸入幅值A=3°,頻率f=2 Hz正弦波時的框架耦合性誤差曲線
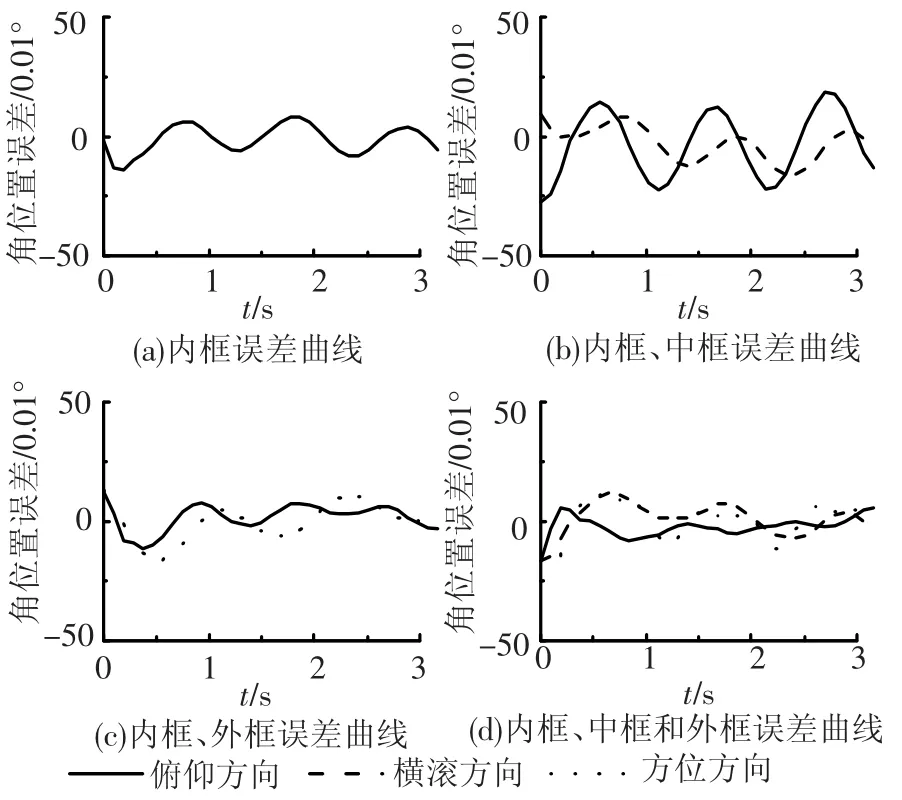
圖4 輸入幅值A=5°,頻率f=1 Hz正弦波時的框架耦合性誤差曲線
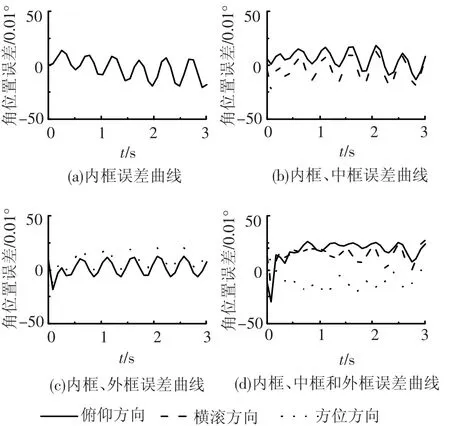
圖5 輸入幅值A=5°,頻率f=2 Hz正弦波時的框架耦合性誤差曲線
圖2為輸入不同方向的正弦激勵時,穩定平臺內框、內框分別與中框、外框及中框和外框一起轉動時的耦合性誤差曲線.從圖中可以看出,內框與車體俯仰方向的最大耦合約為5%,中框與內框的耦合、外框與內框耦合最大約為3%,三框同時運動時,中框和外框作用域內框的耦合最大約為4%;從圖中還可以得出,中框對內框的耦合作用要大于外框的耦合,這與文獻[13]的結論一致.
分別對比圖2與圖3和圖4與圖5可知,車體的激勵頻率對框架間的耦合作用比較小,車體對內框的最大耦合作用約為8%,中框和外框對內框的耦合作用增大了約為2%.
分別對比圖2與圖4和圖3與圖5可得,除去因不平衡力矩、摩擦和傳動間隙等引起的誤差增大外,輸入激勵的幅值對框架間的耦合影響較小.
綜上,內框所受到的框架間的最大耦合約為4%,與車體的最大耦合約為8%.經過對中框和外框的分析,框架間的最大耦合小于5%,與車體的耦合約為10%.耦合性大小的確定,直接證明了所得模型——式(4)~(6)的正確性.
由于框架間的耦合作用較小,在設計穩定平臺時,可將其忽略,通過機械結構的設計來保證[14],而本課題所利用的穩定平臺是已有研究設備,框架間的耦合無法通過機械結構來消除.因此,車載捷聯式三軸視線穩定平臺系統的控制系統設計不僅需要考慮車體對框架的耦合,而且還需考慮框架間的耦合.
5 結 論
1)本文在全面考慮平臺所受擾動力矩的前提下,建立了車載捷聯式三軸穩定平臺系統的運動學和動力學模型,為用于智能車輛視線穩定和動態視野的捷聯式三軸穩定平臺的設計提供了理論依據.
2)分析了平臺框架運動學耦合關系,說明了捷聯穩定方式與速率陀螺穩定方式的區別在于信息獲取和控制方式.
3)動力學模型的分析表明,車體與三軸穩定平臺系統各框架和各框架間均存在非線性耦合力矩.
4)結合已有穩定平臺,設計了耦合性試驗,通過對試驗結果的定量分析,獲得了各框架耦合性大小的邊界范圍:內框所受到的框架間的最大耦合約為4%,與車體的最大耦合約為8%.經過對中框和外框的分析,框架間的最大耦合小于5%,與車體的耦合約為10%.
5)耦合性試驗結果的分析表明理論分析是正確性的.
[1]DICKMANNS E D.Vision:von assistenz zum autonomen fahren[C]//Fahrerassistenzsysteme mit maschineller Wahrnehmung. Berlin Heidelberg:Springer,2005:203 -238.
[2]GUNTHNER W,WAGNER P,ULBRICH H.An inertially stabilised vehicle camera system -hardware,algorithms,test drives[C]//Proceedings of the 32nd Annual Conference on IEEE Industrial Electronics.Piscataway,NJ,USA:IEEE,2006:3815 -3820.
[3]SCHWARTZ I.PRIMUS:autonomous driving robot for military applications[C]//Proceedings of the 2000 SPIE Conference on Unmanned ground vehicle technology II.Orlando,FL;USA:SPIE,2000:313-323.
[4]URMSON C,RAGUSA C,RAY D,et al.A robust approach to high-speed navigation for unrehearsed desert terrain[J].Journal of Field Robotics,2006,23(8):467-508.
[5]GOEBL M,ALTHOFF M,BUSS M,et al.Design and capabilities of the Munich cognitive automobile[C]//Proceedings of the 2008 IEEE Intelligent Vehicles Symposium.Piscataway,NJ,USA:IEEE,2008:1101-1107.
[6]鄒志峰,閆峰.機載光電偵察穩定平臺系統分析[J].機械工程師,2007(4):39-40.
[7]WALDMANN J.Line-of-sight rate estimation and linearizing control of an imaging seeker in a tactical missile guided by proportional navigation[J].IEEE Transactions on Control Systems Technology,2002,10(4):556-567.
[8]SETOODEH P,KHAYATIAN A,FARJAH E.Backstepping-based control of a strapdown boatboard camera stabilizer[J].International Journal of Control,Automation and Systems,2007,5(1):15 -23.
[9]王文清.瞄準線捷聯穩定原理及其應用[J].電腦開發與應用,1998,11(1):14-16.
[10]ALGRAIN M C,POWERS R M.Line-of-sight pointing accuracy/stability analysis and computer simulation for small spacecraft[C]//Proceedings of the 1996 SPIE Conference on Acquisition,Tracking,and Pointing X.Orlando,FL,USA:SPIE,1996:62-76.
[11]CHALONER C P,FARMAN M E,HARDIE A L.A balloon-borne 3-axis stabilised platform for large astronomy experiments[C]//Proceedings of the 8th IFAC Symposium on Automatic Control in Space.Oxford,England:[s.n.],1979:9 -17.
[12]KENNEDY R L.Direct versus indirect line of sight(LOS)stabilization[J].IEEE Transactions on Control Systems Technology,2003,11(1):3-15.
[13]張巍.三軸光學跟蹤試驗轉臺的動力學仿真研究[D].哈爾濱:哈爾濱工業大學,2006.
[14]周瑞青,呂善偉,劉新華.捷聯式天線穩定平臺動力學建模與仿真分析[J].北京航空航天大學學報,2005,31(9):953-957.
Dynamic model and analysis for vehicle mounted strapdown 3-axis stable platform
MAN Yi-ming1,2,JIANG Yan-hua1,HU Yu-wen1,CHEN Hui-yan1,GONG Jian-wei1,DING Zhu-shun2
(1.Intelligent Vehicle Research Center,Beijing Institute of Technology,100081 Beijing,China manyiming@163.com;2.Beijing Aerospace Control Instrument Institute,100854 Beijing,China)
To attain the coupling characters of vehicle-borne strapdown 3-axis stable platform,a complete kinematics and dynamics model of 3-axis stabilization platform system was achieved.Kinematics model analysis indicates that the main difference between strapdown stabilization platform and rate gyroscope stable platform lies in information acquisition and control mode.The rate gyroscope platform gets stability using hardware directly,while strapdown platform gets stability based on the software compensation.Dynamics model shows that the nonlinear cross coupling exists not only between vehicle body and gimbals of stable platform system,but also among gimbals each other.The coupling test not only validated the model,but also obtained the cross coupling boundary ranges of each gimbal,which affords a theoretical foundation for the further study of vehicle mounted strapdown 3-axis stable platform system.
strapdown stabilization platform;vehicle mounted platform;kinematics,dynamics
U666.1 U463.9
A
0367-6234(2011)09-0122-06
2010-04-02.
北京理工大學“985工程”資助項目(200540150).
滿益明(1982—),男,博士研究生;
陳慧巖(1961—),男,教授,博士生導師.
(編輯 楊 波)
