局域均值分解在MEMS陀螺隨機誤差消噪上的應用
2011-07-04 11:28:32朱家海郭明威
電光與控制 2011年12期
李 軍, 朱家海, 謝 聶, 郭明威
(空軍工程大學工程學院,西安 710038)
0 引言
近年來,微機械電子系統(Micro Electronic Mechanical System,MEMS)陀螺因其具有成本低、體積小、重量輕、集成度高等突出優點,已在汽車導航、消費電子、短程武器制導等領域得到廣泛應用。MEMS陀螺的隨機漂移誤差嚴重影響了陀螺的精度,又往往表現為非平穩性、弱線性、慢時變的特性,所以選用有效的濾波方法來提高測量精度顯得尤為重要[1]。
抑制MEMS陀螺隨機誤差的方法通常有3種[2]。1)對MEMS陀螺的隨機誤差信號進行時間序列分析,建立模型。依據模型設計Kalman濾波器,通過Kalman濾波來減小隨機誤差。2)采用低通濾波器抑制高頻噪聲。3)基于小波變換,小波閾值去噪。
但在實際情況下,MEMS 陀螺受多種誤差因素制約,難以建立準確的隨機誤差模型,采用第一種濾波方法效果有限。由于陀螺有用信號與噪聲信號存在交疊頻帶,第二種方法也存在固有的缺陷。小波變換雖具有良好的時頻局部化特性,能實現信號在不同頻帶、不同時刻的分離,具有良好的去噪效果,但小波閾值消噪的性能對于小波基選擇、分解層數、閾值選取準則和閾值依賴層數等因素的依賴性較大,需多次調試,缺乏自適應能力。
針對上述信號濾波方法存在的缺陷,論文引入局域均值分解(LMD)[3],將其與小波方法結合用于MEMS陀螺隨機誤差濾波。該方法不用建立隨機誤差模型,無需多次調試,一步到位,具有良好的自適應能力。
1 信號的局域均值分解
Smith于2005年提出了局域均值分解方法(Local Mean Decomposition,LMD),這種區別于 EMD[4-5]的時頻分析方法將復雜的非平穩信號分解為若干個乘積函數(Production Function,PF)的線性組合,PF表示信號中某一頻率段的諧波信號,表征了其頻率和幅值。每一PF分量由一個包絡信號和一個純調頻信號相乘而得到,包絡信號是該PF分量的瞬時幅值,而PF分量的瞬時頻率則可由純調頻信號直接求出,迭代分離出所有PF分量,即可得到原始信號的時頻分布。對于原始信號x(t)的LMD分解過程如下:
1)確定原始信號所有極值點,任意兩個相鄰極值點的平均值即定義為局域均值,則第i段的局域均值函數值為

相鄰兩極值點差值的1/2定義為局域包絡函數,則第i段局域包絡函數值為

2)對局域均值函數和局域包絡函數用滑動平均法處理[6],得到局域均值函數m11(t)與局域包絡函數a11(t);
3)將局域均值函數m11(t)從原信號中分離出來,得到

用h11(t)除以局域包絡函數a11(t),對h11(t)解調,得到

對s11(t)重復上述步驟得到s11(t)的局域包絡函數a12(t),若a12(t)=1,則已經是調頻信號,否則將s11(t)作為原始數據重復以上迭代過程,直到s1n(t)為一個調頻信號,即它的局域包絡函數a1(n+1)(t)=1時為止;
4)把迭代過程中產生的所有包絡估計函數相乘便可以得到包絡信號(瞬時幅值函數)。

將包絡信號a1(t)和純調頻信號s1n(t)相乘便可得到原始信號的第一個PF分量

它包含了原始信號中最高的頻率成分,是一個單分量的調幅-調頻信號,其瞬時幅值就是包絡信號a1(t),其瞬時頻率 f1(t)則可由純調頻信號求出[6-7],即

將第一個PF分量PF1(t)從原始信號x(t)中分離出來,得到一個新的信號u1(t),將此信號作為原始數據重復以上步驟,循環k次,直到uk(t)為一個單調函數時為止,這樣便可以將x(t)分解為k個PF分量和一個單調函數uk(t)之和,即

由此可見,LMD分解沒有原信號信息的丟失。
2LMD降噪應用
小波閾值濾波是一種比較有效的濾波方法,其原理是通過在不同尺度上選取一合適的閾值,從帶噪的信號中恢復出原信號。基本步驟為:1)選擇合適的小波基和小波分解層數,對含噪聲信號進行小波分解,得到相應小波分解層數;2)對分解后的小波系數進行閾值處理,得到原始信號的小波系數估計值;3)對估計的小波系數進行小波重構,得到去噪后的信號。上述的步驟中,最關鍵的是如何選取閾值和閾值的量化,它直接關系到去噪的效果[1,8]。
由于小波閾值降噪效果取決于小波基、分解層數、閾值選取準則的選擇等,缺乏自適應能力,本論文首次將LMD與小波方法綜合應用于MEMS陀螺濾波,增強對隨機噪聲的自適應濾波能力。MEMS陀螺降噪步驟如圖1所示。
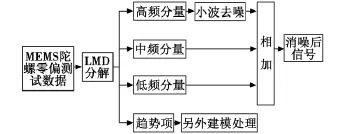
圖1 LMD降噪應用的步驟圖Fig.1 De-noising method based on LMD
LMD可自適應分解出滿足從高頻到低頻分布的PF分量,無需確定分解層數。而且對分解后的PF分量運用小波去噪時,由于各分量的頻帶已較窄,小波基、分解層數等對去噪效果的影響就非常有限。MEMS陀螺的噪聲多數分布在中高頻帶,如果不加判別標準,可以通過觀察將視為噪聲的中高頻PF分量直接舍棄,重構原信號達到降噪目的,但是這樣會損失可能存在于中高頻分量中的有用信息,所以對中高頻帶PF分量采用小波降噪獲得降噪后的數據與不含噪聲的低頻PF分量一起構造原信號,這樣小波閾值降噪僅僅作用于中高頻PF分量,而不是直接作用于整個信號,在很大程度上克服了小波閾值降噪的缺陷。
3 實驗分析
一般認為,陀螺漂移是一弱線性、非平穩的隨機過程,前述濾波方法非常適合處理類似信號。下面將針對實測數據用此方法濾波。
在常溫(20℃)對ADXRS300做了零漂測試。在該陀螺啟動一小時后開始采樣,采樣頻率100 Hz,采樣時間4500 s。其零漂測試曲線如圖2所示,可看出該曲線存在明顯的趨勢項。
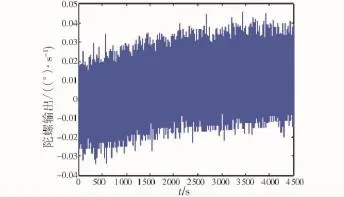
圖2 陀螺輸出原始信號Fig.2 Original output signal of MEMS gyro
MEMS陀螺精度不高,只適合于短時間工作,因此應當著重研究其短時的漂移特性[9]。為此,本文截取開始測試后30~70 s時間段的數據進行分析。
30~70 s段數據如圖3所示,對其進行LMD分解,分解所得各分量與趨勢項如圖4所示,可以看出:該信號經過LMD分解成7個PF分量和一個趨勢項,7個分量由高頻至低頻系列分布,其趨勢項為單調函數,可判定為非隨機噪聲,另對其建模處理,在重構信號時將其直接舍棄。
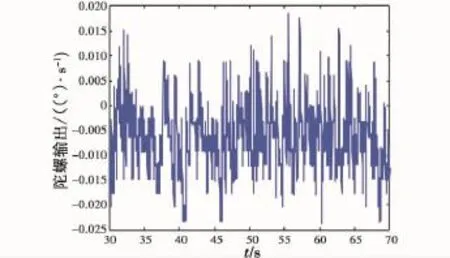
圖3 30~70 s數據Fig.3 Data of 30 s to 70 s
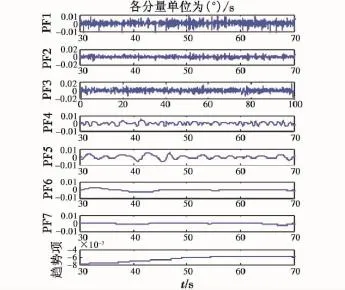
圖4 LMD分解PF1~PF7分量及趨勢項Fig.4 PF1 ~ PF7 and the trend of LMD
采用前述濾波方法,對PF(1-2)采用小波降噪,舍棄趨勢項,重構后得到消噪信號。消噪效果如圖5所示。可發現:消噪后的信號已沒有明顯的趨勢項,方差為原信號的23%,效果較為理想。
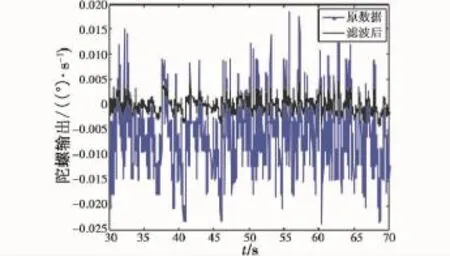
圖5 基于LMD的小波濾波前后對比圖Fig.5 De-nosing results based on LMD
LMD與小波降噪結合可大大提高濾波的自適應能力。此外LMD還可應用于Kalman濾波前的數據預處理,不僅能剔除趨勢項,還可對分解所得到的趨勢項建模以便進行補償。
傳統的陀螺漂移模型為:陀螺漂移=趨勢項+零偏+周期項+ARMA模型[10]。在進行Kalman濾波前需對數據預處理以建立ARMA模型[9]。所以在數據預處理中,一項重要的工作就是要去除趨勢項,使數據平穩化。常用的多項式擬合法當趨勢項不規則時,擬合的階次難以選擇,去除效果也不太理想。由LMD分解原理可知,如果信號中有趨勢項,則一定存在于殘余分量中或低頻的PF分量中。在信號重構時舍棄殘余分量和被判定為趨勢項的低頻PF分量,則去除了信號中趨勢項,避免了多項式擬合法的階次選擇問題。
4 結論
針對MEMS陀螺的噪聲特性,為克服傳統濾波方法的不足,提出了基于局域均值分解與小波去噪綜合應用的方法,對陀螺隨機信號進行濾波處理。經過比較分析:與傳統方法相比,基于局域均值的濾波方法不僅能夠有效去除噪聲,而且具有信號處理的穩定性和自適應性,避免了Kalman濾波的建模過程和小波消噪中參數選取的繁瑣過程,具有較強的實用價值。
[1]杜繼永,黃國榮,程洪炳,等.基于改進小波閾值法處理MEMS陀螺信號噪聲[J].電光與控制,2009,16(12):61-64.
[2]曲從善,于鴻,許化龍,等.基于經驗模態分解的激光陀螺隨機信號消噪[J].紅外與激光工程,2009,38(5):859-863.
[3]SMITH J S.The local mean decomposition and its application to EEG perception data[J].Journal of The Royal Society Interface,2005,2(5):443-454.
[4]HUANG N E,SHEN Z,LONG S R,et al.The empirical mode decomposition and the Hilbert spectrum for nonlinear and norstationary time series analysis[J].Proc.R.Soc.Lond.A,1998,454:903-994.
[5]HUANG N E,ATTOH-OKINE N O.The hilbert huang transform in engineering[M].Boca Raton:Taylor& Francis Group,2005.
[6]任達千,楊世錫,吳昭同,等.基于LMD的信號瞬時頻率求取方法及實驗[J].浙江大學學報:工學版,2009,3(3):523-528.
[7]程軍圣,張亢,楊宇,等.局部均值分解與經驗模式分解的對比研究[J].振動與沖擊,2009,28(5):13-16.
[8]李振興,徐洪州.基于經驗模態分解的小波閾值降噪方法研究[J].計算機仿真,2009,26(9):325-328.
[9]張海鵬,房建成.MEMS陀螺儀短時飄移特性實驗研究[J].中國慣性技術學報,2002,15(1):100-104.
[10]張海鵬,房建成,盛蔚.石英MEMS陀螺漂移的周期性誤差標定及補償[J].北京航空航天大學學報,2007,33(12):1412-1416.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國生殖健康(2019年3期)2019-02-01 06:12:26
意林原創版(2016年10期)2016-11-25 10:28:30
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12