基于改進蟻群算法的無人機低空突防三維航跡規(guī)劃
2011-06-07 01:34:56熊自明吳本材
電光與控制 2011年12期
熊自明,萬 剛, 吳本材
(1.信息工程大學測繪學院,鄭州 450052;2.中國人民解放軍國際關系學院,南京 210039)
0 引言
當前,無人機以其鮮明的特征,在軍事測繪、戰(zhàn)場偵察、電子對抗、炮兵校射等眾多作戰(zhàn)領域得到廣泛應用。但是隨著遙感和探測技術的飛速發(fā)展,防空系統(tǒng)的探測距離、射擊精度和抗干擾能力等迅速提高,無人機將面臨越來越嚴峻的生存威脅。低空突防技術是無人機利用地球曲率和地形起伏造成的低空雷達盲區(qū)以及地雜波對雷達的干擾作用作為掩護,快速地突入敵區(qū)進行襲擊的一種飛行控制技術。擔負重要作戰(zhàn)使命的無人機能否成功地突破敵方密集的防空火力網(wǎng),安全突防到達預定區(qū)域,遂行作戰(zhàn)任務,必然成為無人機作戰(zhàn)運用中首要關注的問題[1],所以航跡規(guī)劃是無人機低空突防成敗的關鍵。
無人機低空突防航跡規(guī)劃實現(xiàn)的優(yōu)劣主要取決于采用的航跡規(guī)劃算法,因此國內外學者在該領域已經(jīng)做了大量的工作。例如,Denton等人提出應用動態(tài)規(guī)劃方法來計算三維最優(yōu)航路,該算法具有“維數(shù)災難問題”;閔昌萬等人提出了一種基于安全走廊的水平面動態(tài)規(guī)劃法,該算法將地形按求解精度柵格化,以柵格作為動態(tài)規(guī)劃搜索的路徑點[2]。而蟻群算法則是這幾年發(fā)展起來的一種新方法。蟻群算法(Ant-Algorithm)是一種概率搜索算法,它利用生物信息激素(Pheromone/Stigmergy)作為螞蟻選擇后續(xù)行為的依據(jù)[3]。基本的蟻群算法有收斂速度慢、計算時間長、易于過早地陷入局部最優(yōu)等缺點,蟻群算法最重要的特點是創(chuàng)造性地使用了啟發(fā)信息[4-5]。但是傳統(tǒng)的蟻群算法易出現(xiàn)停滯現(xiàn)象,本文在建立無人機航跡規(guī)劃模型的基礎上,通過引入偏航角對啟發(fā)信息進行調整改進,加上優(yōu)先搜索集策略,改進了蟻群算法,可以快速有效地搜索到低空突防的最優(yōu)航跡。
1 無人機航跡規(guī)劃建模
為了模擬無人機的飛行環(huán)境,需要建立以下模型:地形模型、威脅模型以及航跡代價評估模型。
1.1 規(guī)劃空間的建立
所謂規(guī)劃空間,是指在進行航跡規(guī)劃時搜索的戰(zhàn)區(qū)范圍,即在這個范圍內為無人機規(guī)劃可飛航跡,在進行航跡規(guī)劃之前,首先必須將飛行環(huán)境中與航跡規(guī)劃相關的要素(地形、威脅等)表示成符號信息,以便于計算機理解處理。
這里采用一種數(shù)據(jù)結構表示空間信息,將整個空間進行三維網(wǎng)格劃分后,網(wǎng)格交織的每個頂點作為空間信息節(jié)點,節(jié)點包含的元素可以表示為

其中:(x,y,z)為節(jié)點位置信息,代表地形數(shù)據(jù);fflag為邊界標志,對可飛區(qū)和邊界進行劃分,可用0,1表示;ccost為該節(jié)點的綜合代價;ffather為該節(jié)點父節(jié)點位置信息;hhig為撞地標志,表示是否滿足最小離地高度。當威脅環(huán)境信息發(fā)生變化時,可更改fflag的值,及時更新數(shù)據(jù)。
規(guī)劃空間節(jié)點的設置一方面要考慮到無人機航跡規(guī)劃的精度,一般來說,空間節(jié)點越密集,可行航路的解就越精確;但另一方面應考慮到無人機水平及俯仰操作限制,使當前節(jié)點與任意相鄰節(jié)點的運動滿足航跡規(guī)劃約束條件,故空間節(jié)點的設置不能過密,滿足航跡約束是其設置的根本依據(jù)。
1.2 地形模型的建立
采取了以各種比例尺數(shù)字地圖、衛(wèi)星影像作為數(shù)據(jù)源進行三維地形建模的方法,如圖1所示。
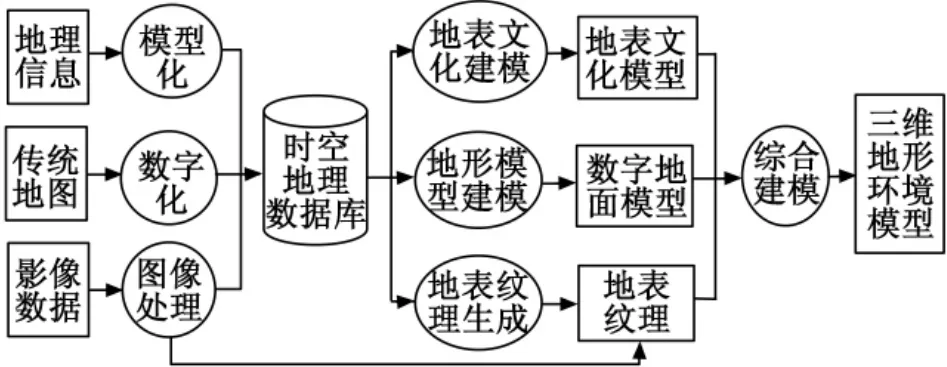
圖1 三維地形建模的流程圖Fig.1 Flow chart of three-dimensional terrain modeling
1.3 威脅模型的建立
威脅模型的建立是作戰(zhàn)無人機執(zhí)行低空突防任務的核心問題之一,同時,威脅模型又是航跡規(guī)劃和航跡危險性評估的信息來源和計算依據(jù)。
1)雷達威脅。
目前,雷達仍然是長距離探測、識別和跟蹤目標最重要的設備。雷達方程是描述雷達系統(tǒng)特性的最基本的數(shù)學方程[6]

在建立模型時,由于目標到雷達之間的距離R對雷達的發(fā)現(xiàn)概率起著重要作用,而雷達又存在一個最大作用距離Rmax,所以可以簡化雷達探測概率模型,近似表示為

2)電磁威脅。
通常情況下,可以認為電磁干擾機的作用范圍為半球形,該半球以干擾機發(fā)射位置為中心,以最大作用距離R為半徑,其中半徑R與飛機抗干擾的能量水平和干擾機的功率有關。
電磁干擾作用區(qū)域模型如下。
式中:R為作用半徑;α為半徑與Z軸正向的夾角;β為半徑在X,Y平面的投影與X軸正向的夾角;R>0,0<α<π,0<β<2π。
3)地空導彈。
暴露在地空導彈之前被擊落的概率為

其中:Pk/v=1-(1-AMYMωM)N。Pk/v表示在被導彈發(fā)現(xiàn)后被擊落的概率,為常數(shù);而Pv依賴于無人機和導彈陣地之間的幾何關系;用ΔhAS表示無人機位于導彈陣地上的高度;RS為無人機和導彈之間的斜距;α為視線的俯角;K0為比例系數(shù)。Pv可近似地表示為
1.4 威脅空間的建立
將威脅信息與數(shù)字地圖融合成一種綜合的地形信息是目前很多文獻采用的一種方法[7-8]。這種方法有效地縮短實時航跡規(guī)劃時威脅處理的時間,同時將對已知威脅的回避轉化為地形回避,簡化了航跡優(yōu)化算法,如圖2所示,以地空導彈為例說明如何生成威脅空間。
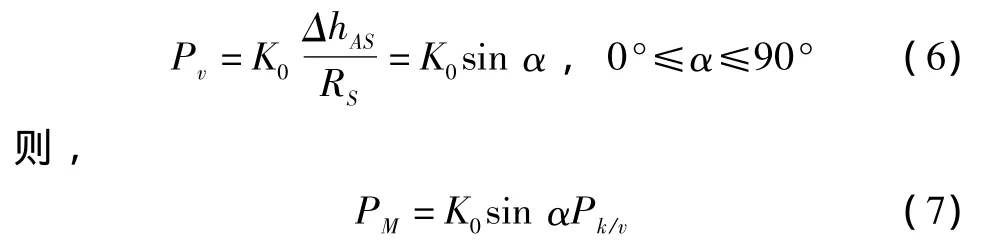
威脅模型等效為地形模型時,等效的地形高度表征威脅的大小。在威脅作用范圍之內,威脅作用大的點相應的等效地形高度就高;威脅作用小的點等效的地形高度就低[9]。根據(jù)威脅的大小與各視線俯角α方向上的擊落概率PM和導彈的最大作用半徑R有關;導彈的作用半徑也和視線俯角α有關,可以用R=f(α)表示。假設地空導彈在各方向上的作用半徑均為常數(shù)R0,對于其他情況,只要將作用半徑和視線俯角α的函數(shù)關系式取代R0,也可推導出類似的等效地形模型。
圖2 地空導彈發(fā)射圖Fig.2 Launching diagram of SAM

式中:Δh表示威脅等效的地形高度;r表示地形點相對威脅的水平距離。
由式(7)知,當r=0時,即α=90°,飛機被擊落的概率PM達到最大值,此時修正前后的高度應相等,聯(lián)立公式得

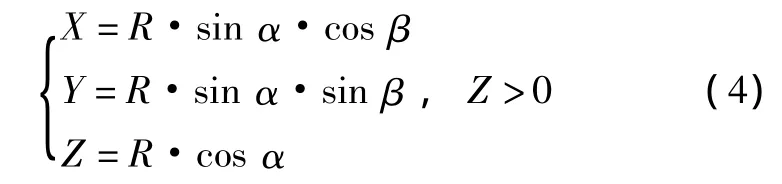
代入式(8)中得到威脅等效地形曲面參數(shù)方程為

設地空導彈威脅的中心坐標為(x0,y0),威脅作用范圍內相應點坐標為(x,y),則

將式(11)代入式(10)可以導出Δhc與(x,y)之間的函數(shù)關系

將地空導彈威脅等效為地形時為一旋轉拋物體,其形狀類似一座山,如圖3所示。
圖3 地空導彈模擬圖Fig.3 SAM mimic diagram
電磁威脅、防空火炮威脅和地空導彈類似,能夠生成類似的山峰地形。威脅等效為地形之后,為實現(xiàn)有山峰存在的虛擬地形,將隨機地形模型與山峰地形模型進行疊加,來模擬具有山峰存在的地形數(shù)據(jù)。疊加數(shù)學方程式為

將其與規(guī)劃空間的數(shù)字地形疊加得到融合后的數(shù)字地形,如圖4所示。
圖4 融合數(shù)字地形圖Fig.4 Fused digital map
1.5 航跡代價函數(shù)
因為本文研究的航跡規(guī)劃主要是地形隱蔽、威脅回避下的低空三維航跡,所以采取按照最小威脅、最大遮蔽效果和最短航路加權方法建立航跡代價函數(shù):

式中:F(R)為整條航跡的代價;(pipj)為航跡R中相鄰兩節(jié)點;Cij(pi,pj)為該條邊的代價;Cijf為該航段燃油代價;Cij
t為該航段綜合威脅代價,包括地形、探測威脅(如雷達)和火力威脅(如地空導彈、高炮等)的綜合代價,表明航跡規(guī)避威脅的能力;Cijh為該航段高度代價,表明航跡地形匹配的能力;加權系數(shù)w1,w2,w3可根據(jù)不同任務決策偏好選擇。
考慮到航跡長度、高度、威脅這3個量的值往往不是同一個數(shù)量級的,甚至可能相差好幾個數(shù)量級。比如航跡長度和高度都是幾十千米的,這必然導致航跡規(guī)劃的結果對權重值w1,w2,w3很不敏感。在代價函數(shù)中的各項指標變量都是單向的,要求航跡長度越短、航跡高度越低、航跡威脅越小越好。故可對代價函數(shù)中的指標進行歸一化處理,將各項指標換算為0~1之間的無量綱的值。
由于威脅信息已經(jīng)等效為地形信息,可以首先確定各項指標f的最大值fmax、最小值fmin,按照式(15)進行歸一化,各項指標均成為一個0~1之間的無量綱的值,其對航跡總代價的敏感程度變得—致了。

2 基于改進蟻群算法的無人機低空突防航跡規(guī)劃
2.1 蟻群算法的特點
蟻群算法用于無人機航跡規(guī)劃有如下特點。
1)動態(tài)性:在螞蟻不斷地散布生物激素的加強作用下,新的信息會很快加入到環(huán)境中,而舊的信息會丟失。這些都通過生物激素的蒸發(fā)更新來完成。
2)分布性:由于許多螞蟻在環(huán)境中感受散布的生物信息激素同時自身也散發(fā)生物信息激素,這使得不同的螞蟻會有不同的選擇策略。
3)協(xié)同性:許多螞蟻的協(xié)同合作使得最優(yōu)路線逐步顯現(xiàn),成為大多數(shù)螞蟻所選擇的路線。
2.2 蟻群算法的改進
1)啟發(fā)信息調整。
在基本蟻群算法中η(r,s)表示節(jié)點s相對于節(jié)點r的可見性,η(r,s)=1/c(r,s)作為啟發(fā)信息,增強了蟻群的尋優(yōu)能力。但這種啟發(fā)信息有可能會因為選擇代價小的航跡而偏離原來航跡,甚至越來越遠,浪費大量的搜索時間。基于此,本文對啟發(fā)信息作以下調整。
受神經(jīng)網(wǎng)絡訓練中有監(jiān)督學習方式的啟發(fā),將理想輸出引入反饋,從而加快神經(jīng)網(wǎng)絡的學習速度,并且能使輸出較好地接近于理想輸出。我們引入偏航角概念 θi(i=0,…,n-1),如圖5 所示。
圖5 偏航角Fig.5 Yaw angle
將偏航角信息反饋到系統(tǒng)中作為搜索信號,加快了搜索速率,也容易找到最優(yōu)解,所以選擇啟發(fā)信息如式(16)所示。

2)優(yōu)先搜索集。
為提高螞蟻的搜索效率,為每個航跡節(jié)點建立一個優(yōu)先搜索集,螞蟻下一個節(jié)點的選擇就在該優(yōu)先搜索集中進行。建立優(yōu)先搜索集的方法是,首先將一個節(jié)點周圍的所有節(jié)點都設為優(yōu)先搜索集,然后在蟻群算法運行過程中根據(jù)各路徑上的信息素濃度來動態(tài)地增減搜索集的數(shù)目。這種動態(tài)建立最優(yōu)搜索集的方法可以得益于蟻群算法本身:信息素濃度不強的路徑不容易被螞蟻選中。另外,根據(jù)一個節(jié)點與周圍節(jié)點的距離進行排序,采用一個節(jié)點附近固定數(shù)目的方法。
2.3 算法實現(xiàn)
1)初始化網(wǎng)格上所有節(jié)點的生物激素信息,形成初始矩陣T;
2)將M只螞蟻置于航路起點;
3)根據(jù)式(16)和優(yōu)先搜索集將螞蟻移動到可行的相鄰節(jié)點,直到所有螞蟻到達目標點;
4)計算每只螞蟻選擇航跡的代價函數(shù)式(14),記錄當前螞蟻選擇的最佳航跡;
5)按生物激素更新規(guī)則更新各節(jié)點的生物信息激素強度;
6)檢查結果,看結果是否需要調整,如果需要,進行調整;
7)重復2)~6),直到大于預定的迭代次數(shù)。
3 基于改進蟻群算法的仿真實現(xiàn)
實驗采用CPU為 AMD Sempron1.99 GHz,內存為1.0 G的計算機,運行環(huán)境為Windows XP,編程環(huán)境為Matlab2006。
假設無人機在100 km*100 km,最高升限為2 km的空間區(qū)域內執(zhí)行任務,對該空間進行離散化,高度離散步長為20 m,水平離散為1 km*1 km的網(wǎng)格,則該任務區(qū)有共計1000000個空間節(jié)點。該離散程度完全滿足無人機的操縱性能,滿足可行航跡的 βmax,αmax,Lmin限制。
設起始點為(0,60,200),目標點為(100,40,200),敵方雷達威脅點坐標為(74,10,0),作用距離為50 km,最小離地高度為80 m,信息素初始值為單位1,螞蟻數(shù)為20只,信息素揮發(fā)初始值ρ=0.2,代價函數(shù)權系數(shù) w1=0.3,w2=0.4,w3=0.3,α =1,β =1。
按照規(guī)劃空間的劃分原則,沿X軸分為100個點,這100個點將整個空間劃分為平行于Y軸與Z軸構成的平面的100個平面。螞蟻從第一個平面的起點按照節(jié)點搜索規(guī)則,搜索適合的下一個平面上的節(jié)點,直至搜索到目標點。
實驗一 不存在威脅。
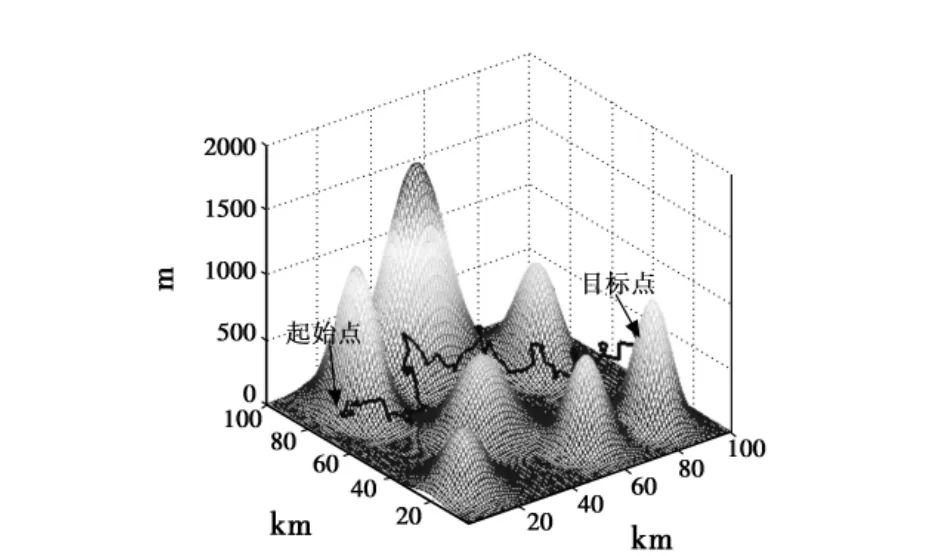
圖6 無威脅三維航跡Fig.6 Three-dimensional route without threats
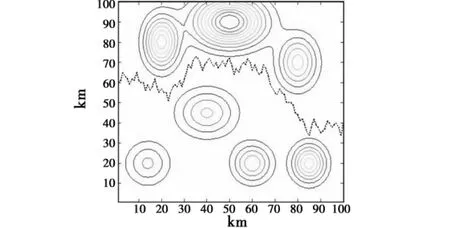
圖7 無威脅二維航跡Fig.7 Two-dimensional route without threats
實驗二 威脅存在。
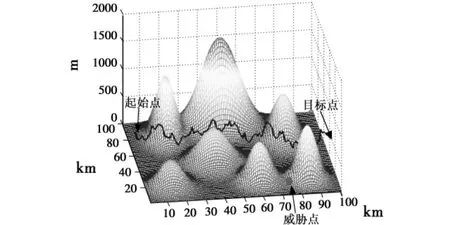
圖8 有威脅三維航跡Fig.8 Three-dimensional route with threats
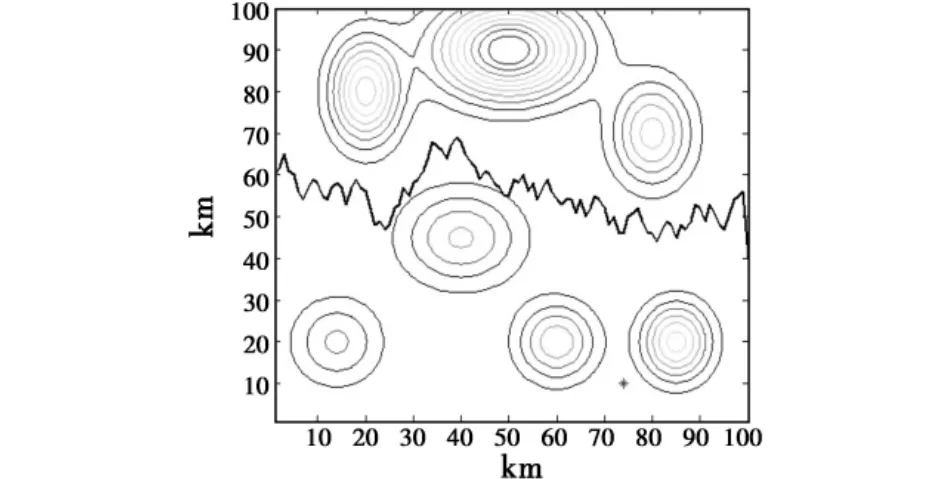
圖9 有威脅二維航跡Fig.9 Two-dimensional route with threats
4 仿真結果分析
仿真結果表明,使用改進的蟻群算法,能夠有效地對威脅點做出判斷,在全局范圍內的地形跟隨和規(guī)避能力較強,如圖7和圖9的對比,無人機很好地遠離了雷達威脅,并改進航跡接近目標點。通過啟發(fā)信息的調整,算法的搜索效率得到了提高。圖7表明,在搜索初期,為避免陷入局部最優(yōu)點,付出了對地形匹配誤差較大的代價;隨著搜索優(yōu)化,后期搜索收斂變得迅速。通過圖10和圖11的對比,可以看出,改進的算法非常適合于威脅存在的航跡規(guī)劃,在初期就迅速收斂到了較小的代價,不到60次的迭代就收斂到最優(yōu);而無威脅時,該算法對地形的規(guī)避做出了大量搜索,收斂速度很慢,迭代到90次才收斂到最小代價。通過比較,該算法能夠有效地避開威脅陣地,盡可能利用地形做掩護,進行低空突防。實驗證明了蟻群算法在三維航跡規(guī)劃中的適應性,也展示了改進后算法在收斂性方面的優(yōu)越性。
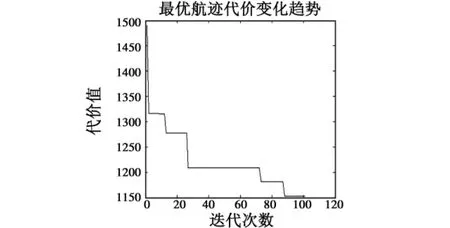
圖10 無威脅航跡代價變化圖Fig.10 Consideration of changes chart in non-threatening route

圖11 有威脅航跡代價變化圖Fig.11 Consideration of changes chart in threatening route
5 結束語
本文研究了無人機低空突防下三維航跡的規(guī)劃問題,提出了基于改進蟻群算法的無人機低空突防三維航跡規(guī)劃方法,并用Matlab工具仿真實現(xiàn),結果表明,該方法能夠快速有效地搜索到最優(yōu)航跡。
[1]趙銘,盛懷潔,王偉.無人機在突防行動中的航路規(guī)劃研究[J].電光系統(tǒng),2008,12(4):32-34.
[2]閔昌萬.飛行器航跡規(guī)劃與軌跡控制研究[M].西安:西北工業(yè)大學出版社,1999.
[3]楊遵.一種多無人機協(xié)同偵察航路規(guī)劃算法仿真[J].系統(tǒng)仿真學報,2007,1(2):l6-l7.
[4]柳長安,李為吉,王和平.基于蟻群算法的無人機航路規(guī)劃[J].空軍工程大學學報,2004,4(2):9-12.
[5]任波,于雷.自適應蟻群算法的無人機航跡規(guī)劃方法[J].電光與控制,2007,12(6):36-39.
[6]李清.綜合低空飛行與突防系統(tǒng)研究[D].南京:南京航空航天大學,1997.
[7]任博,潘景余,蘇暢,等.不確定環(huán)境下的偵察無人機自主航路規(guī)劃仿真[J].電光與控制,2008,1(1):31-34.
[8]李季,孫秀霞,馬強.無人機對空威脅算法與仿真[J].系統(tǒng)仿真學報,2008,20(16):4237-4243.
[9]逯宏亮,歐建軍.協(xié)同空戰(zhàn)中目標的威脅判定方法[J].電光與控制,2005,12(6):8-11.
猜你喜歡
公民與法治(2020年11期)2020-07-25 02:02:06
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中華手工(2017年2期)2017-06-06 23:00:31
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
中國工程咨詢(2016年4期)2016-02-14 07:28:28
中外會展(2014年4期)2014-11-27 07:46:46
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32