直流調制對電力系統小擾動穩定性影響分析
2011-06-13 02:08:34陳厚合李國慶
東北電力大學學報 2011年4期
陳厚合,徐 雙,李國慶,姜 濤,鄧 超
(1.東北電力大學 電氣工程學院,吉林 吉林132012;2.隨州供電公司,湖北隨州441300)
隨著“西電東送,南北互供,大區聯網”戰略實施,我國電網規模不斷擴大、輸送容量及電壓等級不斷提高,通過己建成的交直流輸電通道,東部地區負荷中心、西南地區水電基地及北方地區火電基地基本實現互聯[1-3]。根據規劃到2020年左右我國基本實現全國范圍內電網互聯。大區電網互聯使得系統可跨區域補償、水火互濟,有利于電網錯峰調度、機組緊急備用、系統故障緊急支援等諸多好處[4-6]。然而,在大區互聯電網帶來諸多優勢的同時,區域間低頻振蕩已成為限制互聯系統輸電能力,影響電網安全穩定運行的重要因素之一[7-9]。利用直流系統的功率調制可有效抑制互聯電網振蕩,改善系統運行穩定性[10-14]。
直流功率調制是指在直流控制系統中加入附加直流功率調制器,從兩端交流系統或并聯交流聯絡線上提取反映系統異常的信號來調節直流輸電系統傳輸的有功功率,使之快速補償或吸收其所聯交流系統的功率缺額或過剩,起到阻尼振蕩和緊急支援的作用[15]。為全面分析直流功率調制對電力系統動態穩定性影響,本文構建含直流輸電系統的多機系統Heffron-Phillips模型,借助模態分析理論分析直流無功率調制和有功率調制對系統小擾動穩定性影響,并應用根軌跡法對直流功率調制控制器進行設計,最后通過算例仿真驗證直流功率調制的可行性和調制策略的合理性。
1 HVDC系統模型
常用的換流器直流部分模型如圖1所示,其數學模型為:
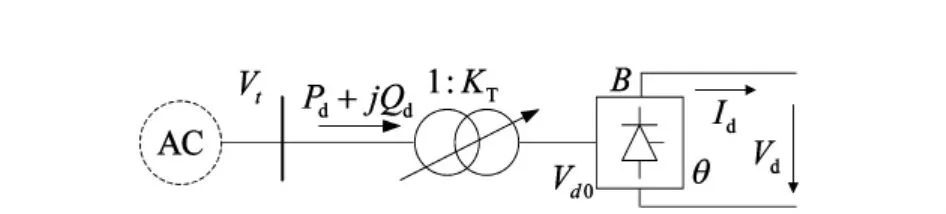
圖1 直流系統模型
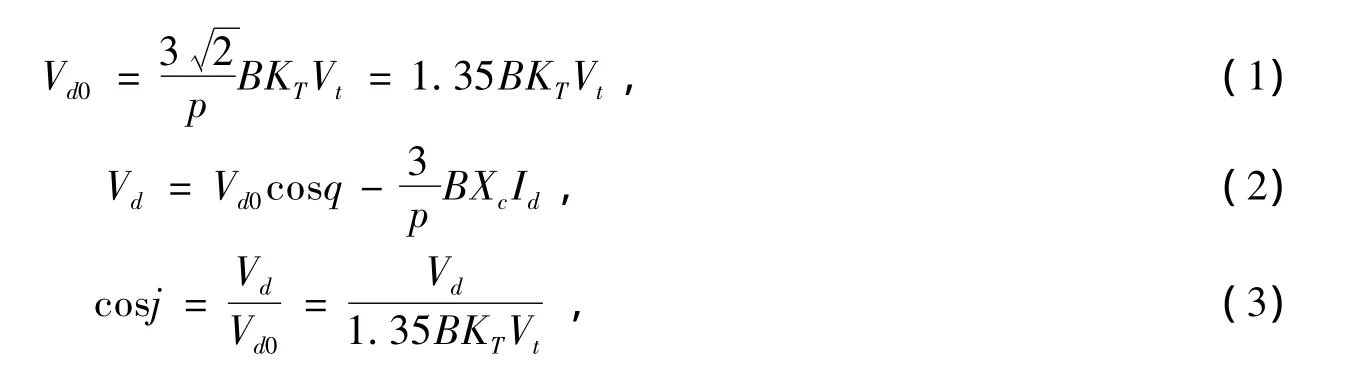

(1)~(5)式中:Vt為換流變壓器高壓母線電壓有效值;KT為換流變壓器變比;B為換流器橋數;φ為功率因數角;Pd和Qd分別為換流站吸收的有功和無功功率;Xc為單橋換流電抗;Vd為換流器節點直流側電壓;Vd0為換流器節點直流側空載電壓;Id為換流器節點直流側電流,流出節點為正;cosθ為整流器觸發角α或逆變器熄弧角γ的余弦值。

圖2 直流輸電系統控制系統示意圖
直流輸電系統高度可控,通過對換流器的快速調節,控制直流輸電線路輸送的功率大小和方向,以滿足整個交直流混合系統的運行要求,即直流輸電系統性能極大程度依賴于控制系統。控制系統應能將直流功率、直流電壓、直流電流及換流器觸發角等控制量限制在直流輸電系統穩態運行極限范圍內,還應將直流系統的暫態過電流及暫態過電壓限制在設備允許運行的范圍內,并保證在交流或直流系統故障后,能在規定的響應時間內恢復到穩態運行狀態,直流輸電控制系統如圖2所示。由圖2可知換流器是直流輸電控制系統的基礎,直流輸電系統控制功能都是通過對換流器控制實現對直流輸電系統的控制,換流器常用控制方式有:定功率控制(CP)、定電流控制(CC)、定電壓控制(CV)和定角度控制(CA),相應的控制方程為:
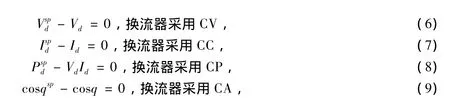
(6)~(9)式中:上角標sp表示預設值;定角度控制為整流器定觸發角α或逆變器定熄弧角γ。

圖3 直流附加控制器框圖
根據換流器不同控制方式,結合整個直流輸電系統特點,直流輸電系統控制策略有:整流側定功率—逆變側定熄弧角、整流側定電流—逆變側定熄弧角、整流側定電流—逆變側定電壓、整流側定電壓—逆變側定電流等。直流輸電系統運行過程中,直流輸電系統的控制策略對交流系統頻率不敏感,利用直流輸電系統進行功率調制改善交流系統的動態穩定性時,需在直流控制系統的主控制層加入附加控制器(如圖2),常用的直流附加控制器類似于PSS采用單輸入單輸出超前—滯后補償控制,附加控制器控制框圖如圖3所示,由圖3的直流附加控制器可得出直流功率調制系統的傳遞函數為:

2 Heffron-Phillips模型
20世紀60年代,北美電力系統發生了低頻振蕩后,F.P.deMello和C.Concordia采用了Heffron-Phillips模型分析電力系統低頻振蕩發生的原因,利用Heffron-Phillips模型分析電力系統小擾動穩定性時認為,發電機AVR的調節作用將產生電磁力矩,該力矩可分解為同步力矩分量和阻尼力矩分量,與功角變化同向的同步力矩分量是正同步力矩分量,與功角變化反向的同步力矩分量是負同步力矩分量;與轉速變化同向的阻尼力矩分量為正阻尼力矩分量,與轉速變化反向的阻尼力矩分量為負阻尼力矩分量。當電力系統運行在遠距離、重負荷等條件下時,為維持發電機機端電壓恒定,AVR增益變大,導致產生的阻尼力矩分量與轉速變化反向,因而是負阻尼力矩分量;AVR的負阻尼分量將抵消發電機固有的部分正阻尼分量,當負阻尼分量等于或超過正阻尼分量時,發電機處于弱阻尼或負阻尼狀態。系統出現擾動后,發電機會出現低頻振蕩,由于發電機缺乏足夠的正阻尼力矩,將導致發電機持續等幅振蕩或增幅振蕩,最終破壞系統的穩定性。即AVR的負阻尼作用是產生系統低頻振蕩的根本原因,從而很好地揭示了電力系統低頻振蕩產生的物理本質[16-18]。Heffron-Phillips模型框圖如圖4所示,根據該圖得出的線性化模型如下:
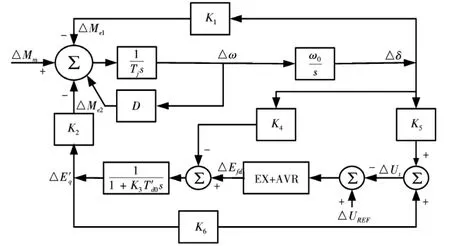
圖4 單機無窮大系統的Heffron-Phillips模型
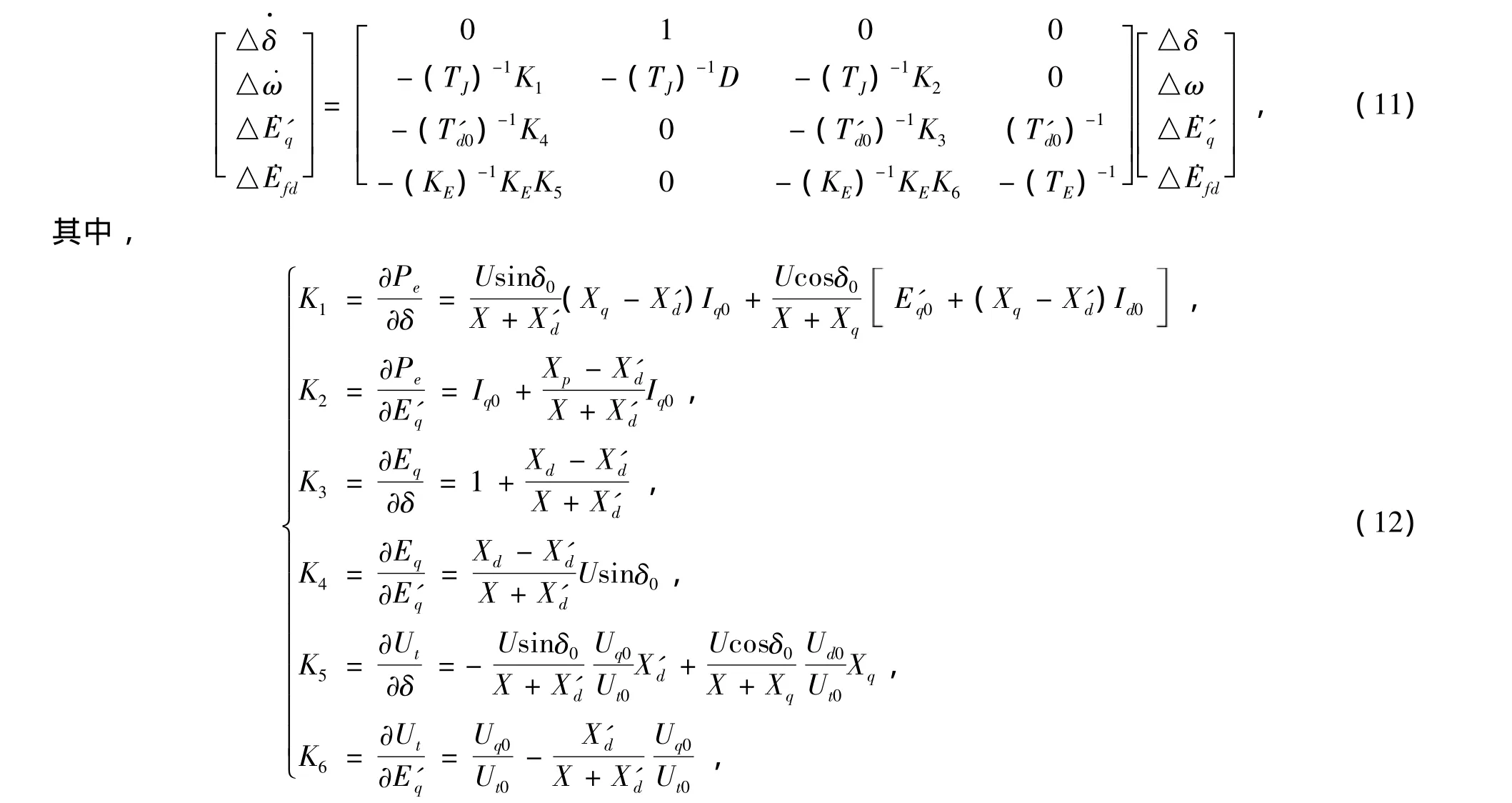
式(11)~(12)中,δ為發電機轉子角;ω為發電機轉速;Eq為發電機空載電勢;E'q為發電機暫態電勢;Efd為發電機勵磁電勢;TJ為發電機慣性常數;D為發電機阻尼系數;T'd0為發電機d軸定子繞組開路下的勵磁繞組暫態時間常數;TE為d軸開路暫態時間常數;KE為勵磁放大增益;U為無窮大系統電壓;Ut為發電機端電壓;Pe為發電機輸出的電磁功率;X為發電機與無窮大系統間電抗;Xq為發電機q軸同步電抗;Xd為發電機d軸同步電抗;X'd為發電機d軸暫態電抗;Id為發電機q軸電流分量;Id為發電機d軸電流分量。
多機系統的Heffron-Phillips模型與式(11)相同,根據式(11)所示的狀態空間,利用模態分析理論求出狀態矩陣對應的特征值及左、右特征向量,并找出系統機電振蕩模式,根據振蕩模式計算系統阻尼比,對弱阻尼比和負阻尼比的機電振蕩模式,計算參與因子和相關比,確定PSS的裝設地點,利用PSS提供正的附加阻尼力矩,改善系統的阻尼特性。
區域間電網互聯規模的進一步擴大,區域間低頻振蕩已成為危害電網安全穩定運行,限制區域間輸電能力的重要因素,PSS受測量信號獲取的限制,一般采用本地量測信號作為控制輸入,對抑制區域內低頻振蕩效果顯著,而抑制區域間振蕩將受量測信號限制,作用有限。利用直流輸電系統的功率調制可有效區域間功率振蕩,類似于PSS是發電機的穩定控制器,直流的功率調制控制器是系統的穩定控制器。根據直流功率調制的動態過程[19],結合式(11)和(12),含HVDC的多機Heffron-Phillips模型表示為:
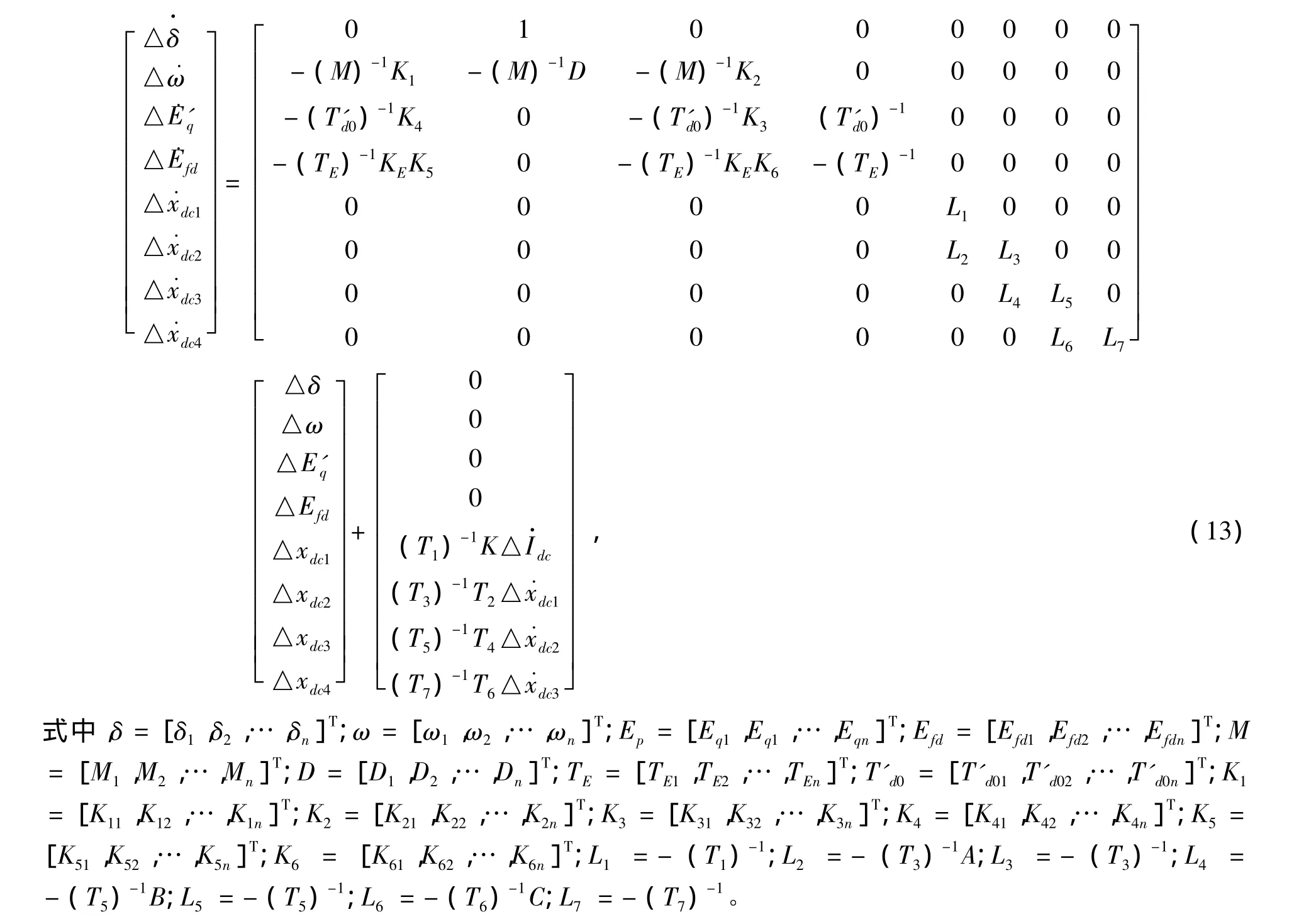
利用式(13)所示的Heffron-Phillips模型即可分析含HVDC的交直流互聯系統小擾動穩定性,然后再根據分析結果借鑒PSS的設計方法可設計HVDC功率調制控制器,改善互聯電網的動態穩定性。
3 直流調制參數整定
控制策略的設計是影響直流調制效果的關鍵因素,常用的調制策略基于控制理論中的根軌跡法[20]。根軌跡設計直流調制控制策略的出發點是,認為加入直流調制后的閉環控制系統具有一對主導共軛極點,交直流互聯系統暫態相應特性主要由這一對主導共軛極點的位置決定。通常將系統性能指標的要求化為決定期望主導極點的位置。引入適當的校正裝置,利用其零極點改變原系統根軌跡,使校正后系統的根軌跡通過期望主導極點或通過期望主導極點的鄰域。

圖5 閉環控制系統框圖
在交直流互聯系統中,以直流輸電系統的功率增量△Pdc作為控制變量,交流聯絡系統有功功率增量△Pac作為被控制變量,并將△Pac作為反饋輸入,系統的閉環傳遞函數框圖如圖5所示。系統傳遞函數為:

對應的閉環系統特征方程為:

加入反饋環節H(x)后,閉環系統的主導極點為s*,則s*必滿足如下條件:

由式(16)便可計算直流調制環節H(x)所需補償的相位和增益,根據圖3可知調制環節利用了3級超前滯后補償環節。每級補償arg(H(s*))/3,由超前環節基本公式可知式()中參數α、T分別為:

再根據直流附加控制器傳遞函數Gp(x)等于H(x)的特點,可計算出式(10)的增益KGP:

將α、T、KGP代入式(10)即可得出圖3所示的直流附加控制器的各參數。
4 仿真分析
為驗證本文提出的直流輸電系統功率調制改善電力系統小擾動穩定控制策略,以圖6所示的交直流互聯系統為例進行仿真分析。該交直流互聯系統的具體參數見文獻[21],系統穩態運行時直流聯絡線和交流聯絡傳輸的有功功率分別為200 MW,在該穩態運行點處進行模態分析的結果表明,該系統共有3個機電振蕩模式,分別為f1=0.572 Hz,ζ1=0.0069的區域間振蕩模式,該模式為發電機1、2逆反與發電機3、4相對運動;f2=1.053 Hz,ζ2=0.071的區域內振蕩模式,該模式為發電機1逆反與發電機2相對運動;f3=1.108 Hz,ζ3=0.079的區域內振蕩模式,該模式為發電機3逆反與發電機4相對運動。由計算結果可知,區域間振蕩模式為弱阻尼模式,需改善該機電模式下的阻尼特性。
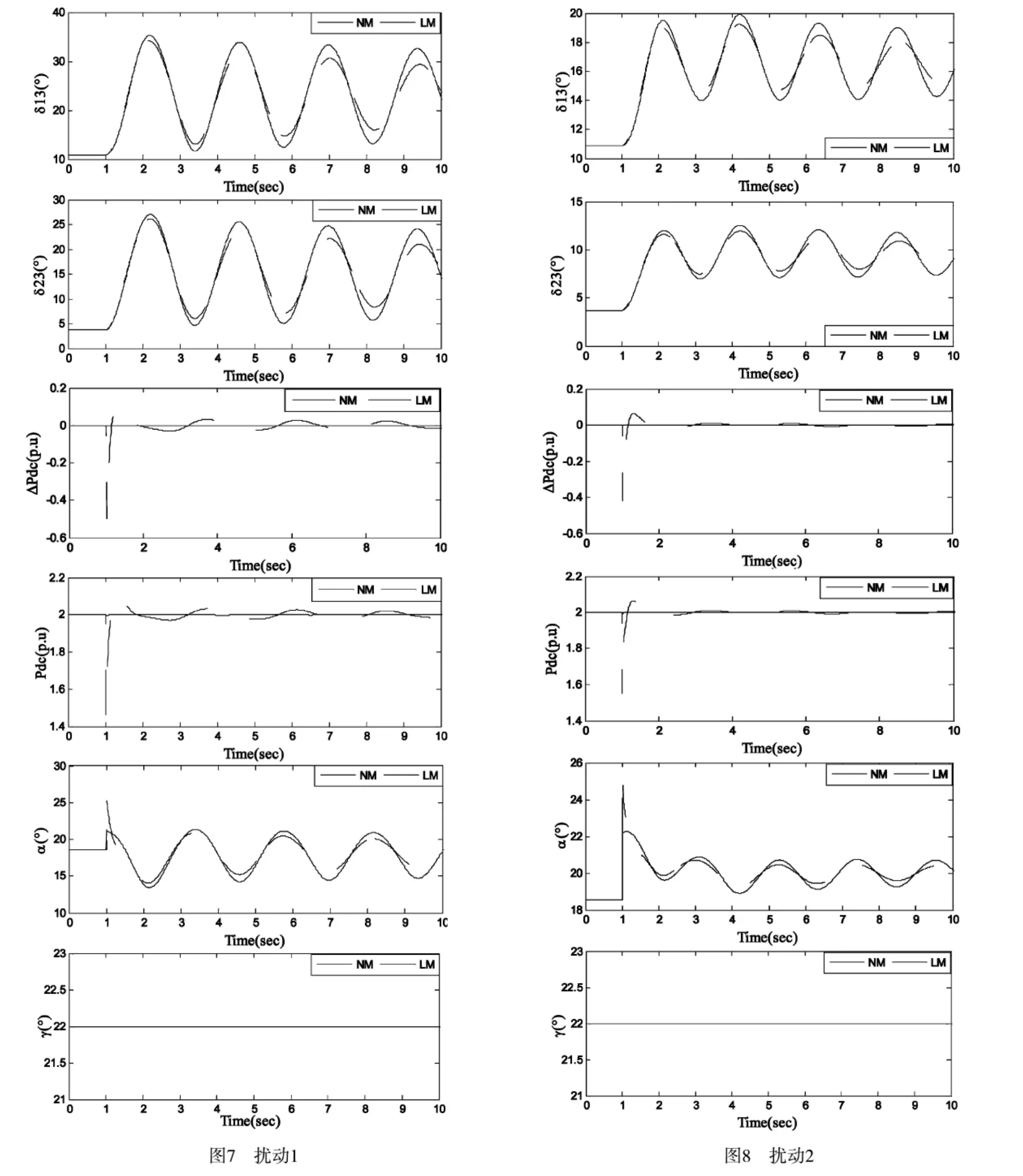
為改善該區域間振蕩模式的阻尼特性,采用直流調制的預期目標是將該振蕩模式的阻尼比提高到ζ*1=0.2左右。根據計算可知要使期望主導共軛極點為-0.7065±j3.53,需提供的超前補償相位為 121°,在根據式(16)~(18)對圖3所示的直流功率調制環節的參數進行整定。對整定后的參數所形成的式(14)所示的含HVDC的多機Heffron-Phillips線性化模型進行模態分析,結果為:f1=0.512 Hz,ζ1=0.193;f2=1.054 Hz,ζ2=0.073;f3=1.11 Hz,ζ3=0.080。結果表明,采用加入直流調制后,顯著提高了區域間振蕩的阻尼比,改善了系統的小擾動穩定性,但直流調制對區域內振蕩模式影響不大,由此可知,在交直流互聯系統中改善區域內振蕩模式的阻尼特性易采用PSS;而改善區域間振蕩模式的阻尼特性易采用直流調制。為進一步驗證直流調制抑制區域間低頻振蕩的效果本文進行了時域仿真,擾動方式為:擾動1,無故障停運母線7、8間的支路1和母線8、9間的支路1;擾動2,無故障停運母線8、9間的支路1。仿真結果見圖7、8。圖中,NM表示無直流功率調制;LM表示采用本文的功率調制策略。仿真結果表明,采用直流功率調制可有效抑制系統功率振蕩,改善互聯系統的動態穩定性。
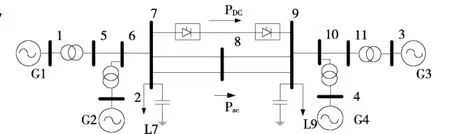
圖6 4機交直流互聯系統
5 結 論
本文提出并建立了含HVDC的多機Heffron-Phillips線性化模型;通過模態分析理論分析了HVDC阻尼系統功率振蕩的機理;利用根軌跡法對直流輸電系統功率調制環節的參數進行整定;提出采用PSS抑制區域內振蕩和采直流調制抑制區域間振蕩相結合地改善系統小擾動穩定性策略。最后以典型交直流互聯系統進行仿真分析,模態分析和時域仿真結果表明,基于根軌跡設計的單輸入單輸出超前—滯后補償功率調制控制器方法簡單、實用、實現容易;直流輸電系統本身不具有阻尼功率振蕩功能,采用附加控制器后才可有效改善系統的小擾動穩定性;直流輸電系統調制可顯著改善區域間低頻振蕩模式的阻尼特性,但對抑制區域內振蕩模式效果不佳。
[1]劉振亞.特高壓電網[M].北京:中國經濟出版社,2005.
[2]劉振亞,舒印彪,張文亮,等.直流輸電系統電壓等級序列研究[J].中國電機工程學報,2008,28(10):1-8.
[3]舒印彪.1000kV交流特高壓輸電技術的研究與應用[J].電網技術,2005,29(19):1-6.
[4]舒印彪,張文亮.特高壓輸電若干關鍵技術研究[J].中國電機工程學報,2007,27(31):1-6.
[5]舒印彪,胡毅.交流特高壓輸電線路關鍵技術的研究及應用[J].中國電機工程學報,2007,27(36):1-7.
[6]舒印彪,張文亮,周孝信,等.特高壓同步電網安全性評估[J].中國電機工程學報,2007,27(34):1-6.
[7]鄭寶森,郭日彩.中國互聯電網的發展[J].電網技術,2003,27(2):1-3.
[8]余貽鑫,李鵬.大區電網弱互聯對互聯系統阻尼和動態穩定性的影響[J].中國電機工程學報,2005,25(11):6-11.
[9]朱芳,趙紅光,劉增煌,等.大區電網互聯對電力系統動態穩定性的影響[J].中國電機工程學報,2007,27(1):1-7.
[10]荊勇,洪潮,楊晉柏.直流調制抑制南方電網區域功率振蕩的研究[J].電網技術,2005,29(30):53-56.
[11]M.Klein,G.Rogers,P.Kunder.A Fundamental Study of Inter-Area Oscillations in Power System[J].IEEE Transactions on Power System,1991,6(3):914 -921.
[12]T.Smed,G.Andersons.Utilizing HVDC to Damp Power Oscillations[J].IEEE Transactions on Power Delivery,1993,8(2):620 -627.
[13]D.E.Martin,W.K.Wong,D.L.Dickmander,et al.Increasing WSCC Power System Performance with Modulation Controls on the Intermountain Power Project HVDC System[J].IEEE Transactions on Power Delivery,1992,7(3):1634 -1642.
[14]A.E.Hammad.Stability and Control of HVDC and AC Transmission in Parallel[J].IEEE Transactions on Power Delivery,1999,14(4):1545-1554.
[15]趙畹君.高壓直流輸電工程技術[M].北京:中國電力出版社,2004.
[16]W.G.Heffron.R.A.Phillips.Effect of a Modern Amplidyne Voltage Regulator on Under Excited Operation of Large Turbine Generators[J].IEEE Transactions on Power Apparatus and Systems,1952,71(1):692 -697.
[17]F.P.deMello,C.Concordia.Concept of Synchronous Machine Stability as Affected by Excitation Control[J].IEEE Transactions on Power Apparatus and Systems,1969,88(4):316 -329.
[18]M.K.El-Sherbiny,D.M.Mehta.Dynamic System Stability Part I:Investigation of the Effect of Different Loading and Excitation Systems[J].IEEE Transactions on Power Apparatus and Systems,1973,92(5):1538 -1546.
[19]Y.-X.Ni,V.Vittal,W.Kliema,et al.Nonlinear Model Interaction in HVDC/AC Power Systems with DC Power Modulation[J].IEEE Transactions on Power Systems,1996,11(4):2011 -2017.
[20]劉取.電力系統穩定性及發電機勵磁控制[M].北京:中國電力出版社,2007.
[21]P.Kunder.Power system stability and control[M].New York McGraw-Hill,1994.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
故事作文·高年級(2021年12期)2021-12-21 02:32:35
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
智能建筑電氣技術(2015年5期)2015-12-10 05:52:30
