數據融合技術在船舶組合導航中的應用研究*
2011-06-06 10:05:14孟士超唐正茂
艦船電子工程 2011年10期
孟士超 唐正茂
(海軍駐431廠軍代表室1) 葫蘆島 125004)(武漢第二船舶設計研究院2) 武漢 430064)
1 引言
導航即引導運載體航行,現代的導航設備除了這一任務以外,還要為運載體上的其它系統(tǒng)如監(jiān)視、測量、武備等系統(tǒng)提供精確的位置、運動速度、載體姿態(tài)等導航信息,所以就有了各種導航儀器及系統(tǒng),比如:推位系統(tǒng)、慣導系統(tǒng)、無線電導航系統(tǒng)、GPS系統(tǒng)、多普勒雷達導航系統(tǒng)等[1]。計算機技術與控制技術的結合應用,使船舶導航由原來的單一導航發(fā)展到組合導航,我國有越來越多的船舶采用了組合導航系統(tǒng)INS(Integrated Navigation Sys-tem)。INS不僅可以將不同導航系統(tǒng)或設備聯合起來,自動完成導航或其它特定的任務,而且由于采用了數據處理技術[2],大大提高了導航信息的精度,這是組合導航系統(tǒng)的優(yōu)點。
由于在組合導航系統(tǒng)中采用了多種導航系統(tǒng),因此會產生不同角度的船舶定位信息、姿態(tài)信息等,如何利用這些不同的定位信息實現船舶的精確導航,數據融合為這些信息進行融合決策處理[3]、從而為現代船舶組合導航信息的應用提供了有力的解決方法,為此,本文將主要探討數據融合在現代船舶組合導航中的應用。
2 數據融合在船舶組合導航信息處理中的應用
2.1 數據融合原理
數據融合是利用計算機技術對由若干傳感器獲得的時間和空間觀測信息在一定準則下加以自動分析、綜合以完成所需的決策和估計任務而進行的信息處理過程,數據融合中心通過多傳感器獲取觀測對象的特征信號以提取征兆,并進行多層面的關聯組合、數據選擇,從而獲得對觀測對象的各方面的信息更可靠的認識和潛在的發(fā)展趨勢的態(tài)勢評估[4]。數據融合的目的是為了進行數據判別,進而獲得對觀測對象的識別、態(tài)勢評估,通過數據判別給出過程優(yōu)化決策結果,在信息融合和數據判別的過程中所用到的原始信息均來自于外界傳感器的輸入,由于傳感器都無法做到100%的可靠,因此,對多傳感器的信號的信息進行融合和判別都是很有必要的[5],而在信息融合和數據判別時采用不同的算法,直接影響到了最終對觀測對象態(tài)勢的評估結果。

圖1 數據融合原理示意圖
2.2 船舶導航數據融合的主要方法及存在問題
數據融合方法研究的內容是與數據融合有關的算法[6~9],多傳感器融合的實質是多源不確定性信息的處理,這是一個復雜的處理過程。如前所述,信息在系統(tǒng)中由下至上的處理過程中,信息的表示形式在不斷地變化;此外,信息的不確定性可以是隨機的、模糊的,可以有驗前信息的形式,也可以是無驗前信息的形式,針對不同的信息表示形式有不同的處理方法。
目前在船舶導航中經常采用的融合算法主要有加權平均法、概率統(tǒng)計法、D-S推理、多貝葉斯法、模糊邏輯法、神經網絡法和卡爾曼濾波法等。但是上述的數據融合方法在船舶導航信息的融合處理上也暴露出很多不足[10]。首先,由于船舶的導航信息多是不穩(wěn)定的隨機信號,而上述的數據融合方法只能對較為簡單的傳感信息進行融合,對于復雜的導航信息在數據融合上存在很大的不確定性;其次,在船舶導航系統(tǒng)中數據融合最為成功的是卡爾曼濾波,但隨著可供運載體裝備的導航系統(tǒng)越來越多,非同類導航子系統(tǒng)的增加使量測信息增多,這對提高組合導航系統(tǒng)精度十分不利,如果繼續(xù)采用傳統(tǒng)的集中式卡爾曼濾波器實現組合,則會導致濾波計算量以濾波器維數的三次方劇增,無法滿足導航計算的實時性要求,不利于系統(tǒng)的實時運行,為此逐漸發(fā)展了基于聯邦濾波器的組合導航系統(tǒng),其中所采用的數據融合方法不但具有很高的導航精度,而且使組合導航系統(tǒng)具有很強的容錯能力[1]。
另一方面,針對組合導航系統(tǒng)的信息融合問題,目前的研究多集中在飛機及航天器上,而于艦船方面則少有資料,而且到目前為止,基本上還處于理論研究與仿真階段,實際系統(tǒng)中還較少用到聯邦濾波器,本文著力從實際應用的角度出發(fā),希望能將聯邦濾波器運用到船舶組合導航系統(tǒng)中。
3 基于聯邦濾波器的船舶組合導航信息數據融合研究
3.1 聯邦濾波器的一般結構
聯邦濾波器是一種兩級濾波結果,其結構形式如圖2所示[3]。圖2中公共參考系統(tǒng)(一般選誤差具有慢變化和隨時間積累特性的系統(tǒng),如船位推算和慣性導航系統(tǒng))的輸出一方面直接給主濾波器,另一方面給各子濾波器(即局部濾波器,這里仍采用卡爾曼濾波算法,處理從子系統(tǒng)傳來的測量信息。子系統(tǒng)一般選誤差具有高頻特性但不隨時間變化的導航系統(tǒng),如GPS、勞蘭C等)作為公共狀態(tài)變量值。各子濾波器的局部估計值(公共狀態(tài))及其協方差陣Pi送入主濾波器和主濾波器的估計值一起進行融合以得到全局最優(yōu)估計[3]。此外,從圖中還可以看到,由子濾波器與主濾波器合成的全局估計值及其相應的協方差陣Pg被放大為βi-1·Pg(βi-1<1)后再反饋到子濾波器(圖中用虛線表示),以重置子濾波器的估計值,即:

3.2 基于聯邦濾波器的傳感器本地數據融合決策研究

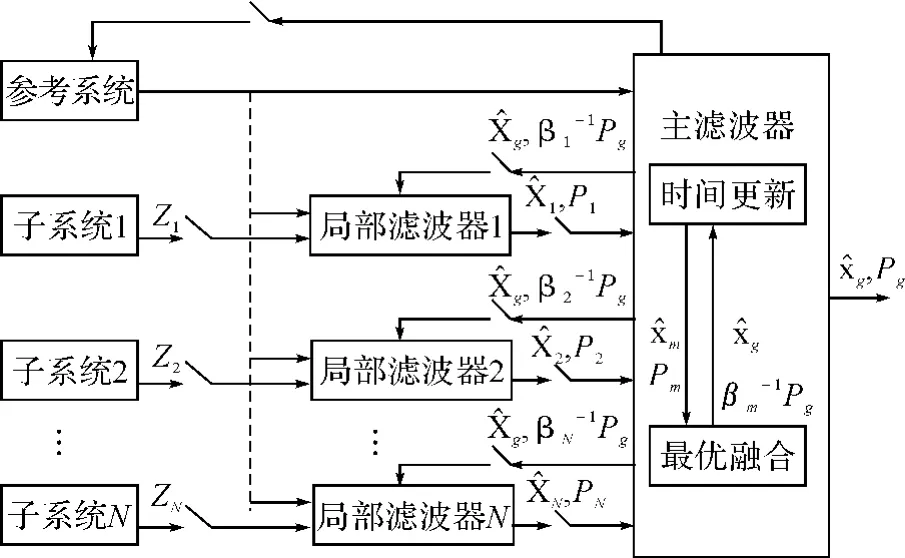
圖2 聯邦濾波器一般結構圖
融合中心的全局一位決策u0是基于向量集[R1,R2…,RN]的,中心的偵測及誤報概率分別為PD和PF,有PD=p[u0=1|H1],PF=p[u0=1|H0]。
為衡量決策規(guī)則的性能,必須計算偵測與誤報概率,從而為基于傳感器可靠性的多傳感數據融合提供支撐。將決策向量集[R1,R2,…,RN]表示為向量Rk={r1,1,r1,2,…,r2,2,…,ri,j,…,rN,b}形式,去噪聲的基礎上執(zhí)行數據融合算法,有效的提升了導航信息的處理實時性,最終形成可信性較高的導航信息。
1)傳感器本地多次決策融合算法。由于單個傳感器檢測到的相關狀態(tài)參數并不能直接反映目標的真實物理狀態(tài),據其做出的判斷容易產生誤報,如果將多個傳感器重復檢測同一物理狀態(tài)參數,將所有傳感器所檢測到的全部信息,可以利用融合技術,對多個傳感器節(jié)點提供的局部不完整觀測量進行數據融合,實現將傳感器的可靠性納入決策融合的范圍之內,從而清除多傳感器之間可能存在的冗余和矛盾。
令H1表示傳感器存在故障,H0表示傳感器無故障,當N個本地傳感器分別收到k個未經處理的原始數據向量Xi=[xi,1,xi,2,…,xi,k],i=1,2…N,xi,j∈{0,1}分別在本地作出一個b位(b≤k)的決策向量Ui=[ui,1,ui,2,…,ui,b],i=1,2…N,ui,j∈{0,1},則此時各本地傳感器節(jié)點的偵測正確的概率為Pd=P[xi,j=1|H1],1≤i≤N,1≤j≤k;誤報概率為Pf=P[xi,j=1|H0],1≤i≤N,1≤j≤k。
本地決策向量集[U1,U2…UN]傳輸到融合中心,由于傳感器都不是絕對理想的,存在一定程度的噪聲,因此決策中心接收到的向量集為[R1,R2,…,RN],其中故Rk有2Nb-1種不同組合表示,以N=2,b=2為例,R3=[0,0,1,1]。根據概率理論有:
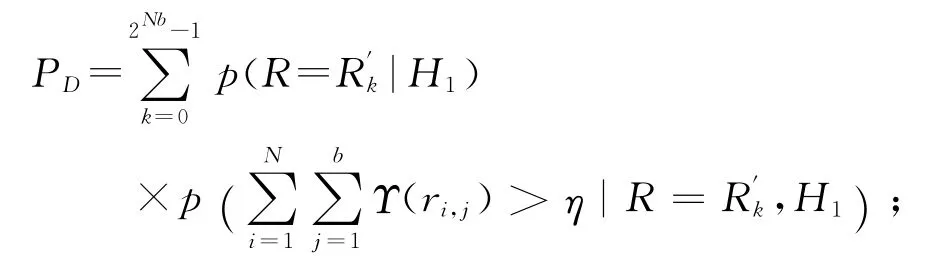
由于p(|R=Rk,H1)與H1相互獨立,故有:
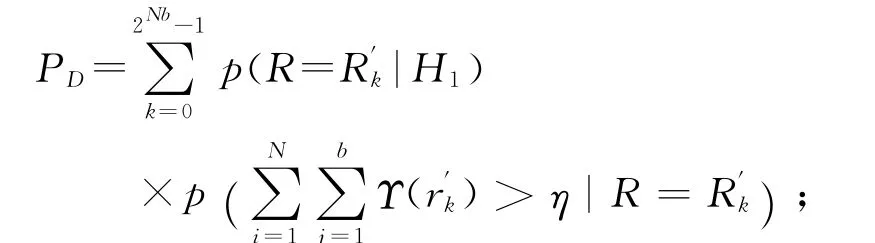
同理,決策中心的誤報概率為:

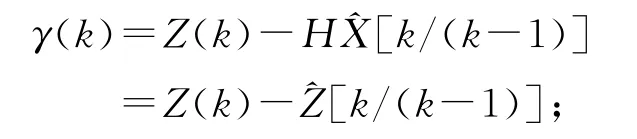
2)聯邦濾波器的數據融合容錯性分析。所謂“容錯”是指系統(tǒng)對故障的檢測能力、隔離能力和恢復能力[3]。在容錯組合導航系統(tǒng)的設計中,一般聯邦濾波器在對傳感器的故障進行監(jiān)測預報時,利用測量信息殘差:測量信息殘差可以較好的檢測和隔離某些傳感器的突變故障。因為[k/(k-1)]包含了以前的量測信息,當系統(tǒng)無故障時,[k/(k-1)]=[k/(k-1)]是對Z(k)的最好預報估計,所以r(k)應當很小,在理論上它應為零均值的白噪聲。當傳感器發(fā)生故障時,r(k)也會發(fā)生突變,根據它就可以檢測和隔離傳感器的故障。實際上,在實際的船舶導航信息應用中來看,新息檢測對軟故障不是很有效的。這是因為軟故障是逐漸發(fā)展起來的,開始時故障不易顯露出來,而未被檢測出來的故障將污染[k/(k-1)],即[k/(k-1)]跟蹤故障,減少Z(k)和[k/(k-1)]的差異,這時r(k)不會發(fā)生很大變化,因此故障檢測效果不好。
在本文中,由于在信息采集源頭端就進行了傳感器信息可靠性的多次數據融合判別,子濾波器自身傳感器的誤差狀態(tài)估計是分開的,這樣傳感器的誤差狀態(tài)在子濾波周期內不會受到其他傳感器的影響,只有在較長時間的融合周期之后才會有影響;當某一個傳感器的故障被檢測和隔離后,其它正常子濾波器的狀態(tài)估計仍然存在,于是利用這些正常子濾波器的狀態(tài)估計經過簡單的融合算法之后可得到系統(tǒng)的全局估計。系統(tǒng)重構簡單,同時故障恢復能力強;主濾波器可以使用一個比子濾波器更精確的系統(tǒng)模型,這樣導航系統(tǒng)的容錯能力就提高了。因此在后向通道的聯邦濾波器中可以實現對系統(tǒng)故障的判別和預警預報,從而大大提高了整個組合導航信息的可信性及組合導航系統(tǒng)的可靠性。
4 結語
多傳感器信息融合判別算法已經逐漸受到眾多學者專家的重視并逐步得到發(fā)展,本研究課題初步探討了船舶導航信息的數據融合,在考慮了傳感器失效和誤報的情況下,提出了傳感器本地多次決策的數據融合算法,以提高傳感器對導航信息采集的可靠性,并在此基礎上討論了聯邦濾波器在傳感數據融合的基礎上的容錯性,對于船舶組合導航系統(tǒng)的信息處理研究具有一定的推廣和借鑒意義。
[1]袁信,余濟祥,陳哲.導航系統(tǒng)[M].北京:航空工業(yè)出版社,1993
[2]張崇猛,陳超英,莊良杰,等.信息融合理論及其在INS/GPS/Doppler組合導航系統(tǒng)中的應用[J].中國慣性技術學報,1999,7(3):1~8
[3]李洪志.信息融合技術[M].北京:國防工業(yè)出版社,2000
[4]朱澤君,黃濤,劉曦霞,等.多傳感器數據融合技術研究現狀及發(fā)展方向[J].艦船電子工程,2009,29(2):13~16
[5]陳世華,潘鴻飛,朱璐.組合導航信息融合技術研究[J].國外電子測量技術,2007(2):21~24
[6]鐘暐,左廷英.基于聯邦濾波的INS_GPS組合導航系統(tǒng)數據融合研究[J].江西理工大學學報,2009(10):67~70
[7]趙凈凈,王艷東.組合導航系統(tǒng)NNM信息融合算法[J].北京航空航天大學學報,2009(3):292~295
[8]許麗佳,陳陽舟.組合導航系統(tǒng)的模糊信息融合[J].系統(tǒng)仿真學報,2005,17(1):124~128
[9]Zhang Jing,Ji Zhihua,Tian Weifeng.A suboptimal Kalman filter with fading factors for DGPS/MEMS-1MU/magnetic compass integrated navigation[C]//Proc of IEEE Ins Intelligent Transportation System.Shanghai,China.IEEE Press,2003,2:12~15
[10]劉宇宏,劉勃賢.數據融合技術在航海避碰決策支持系統(tǒng)中的應用[J].上海海運學院學報,2000(4):51~53.
[11]Zhou Ruixiang,Liu Tingqi,Han Jianding,et al.Fault Diagnosis of Air plane Hydraulic Pump[C]//Proceedings of the 4th world congress on intelligent control and automation,2002,6:10~14
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
今日農業(yè)(2021年19期)2022-01-12 06:16:36
船舶(2021年4期)2021-09-07 17:32:22
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
