掘進機電氣綜合保護數據采集方法的研究
2011-05-15 08:08:00喬忠良
太原理工大學學報 2011年4期
張 博,喬忠良
(1.內蒙古科技大學,內蒙古包頭014010;2.太原理工大學,太原030024)
隨著現代化煤礦生產安全要求越來越嚴格,煤礦對掘進機電氣保護系統的要求也越來越高。原有的電氣保護的數據采集在整定精度和采樣精度上都不高,無法實現具有多功能的保護,筆者提出了一種全新掘進機電氣綜合保護數據采集的方法,即改進的全波傅氏算法,在保證精度的基礎上使計算量大大減少。并介紹了各序分量算法的實現,使得掘進機的綜合保護性能得到了全面的提高。與其他的電氣保護,其優點是保護更先進、更快速和更全面。
1 數據采集及其算法
掘進機綜合保護所需要采集的信號有數字量和模擬量信號兩大類。數字量信號有來自接觸器等設備的輔助接點或繼電器的開關量信號,這些信號經過耦合器和保護裝置相連。采集模擬信號時,需要對模擬信號進行離散化,這樣才能保證原始數據不會失真。模擬量輸入電路又稱數據采集電路,主要作用是完成模數轉換,規范輸入電壓,完成與主CPU接口,實現數據采集。模擬量通道是微機保護中極其重要的電路,通道中實現運算的信號是二進制信號,保護裝置的動作速度和測量精度等性能與該電路密切相關。
1.1 數據采集電路
數據采集電路要從被保護的線路或設備上的電流、電壓互感器等變送設備上采集數據,一般根據模數轉換器輸入范圍的要求,將互感器的二次側數值變換為相應范圍的電流信號或電壓信號。當涉及到移相、提取某一分量時,在微機保護中,可以通過軟件來實現。采樣電路主要由傳感器、電壓調理電路和A/D轉換部分組成。電動機的電流、電壓信號用電流、電壓變送器來采集,再進行適當的放大和調理以后送給單片機或PLC內部集成的A/D轉換模塊的模擬輸入通道。例如:要檢測油泵電機的三相電流信號,因油泵電機的額定電流比較大,選用時要考慮過流的影響,所以應選用通過電流較大的電流互感器。再比如,要檢測系統電壓,因系統電壓額定為660 V,選用時考慮過電壓、低電壓等因素,所以一般采用交流電壓變送器檢測系統電壓。電壓調理電路通常包括電壓跟隨器、比例調整電路和硬件濾波電路三部分,他們的作用是為了保證電機在額定電流以及當電機啟動和過載時出現過電流情況下的檢測精度,模塊硬件結構如圖1所示。
1.2 數據的算法
由于掘進機的綜合保護很大程度上是對電機進行保護,所以從電動機的故障保護原理入手,分析電機的各種類型的故障,找出判斷各種故障的依據,才能推導出相對應的算法。這里介紹的算法是先檢測電流,經電流電壓變換設備后把采集的信號送到鑒幅電路,鑒幅電路通過檢測電流幅值、零序和負序電流分量,以此作為故障判據,從而形成各種保護的算法。

圖1 模擬信號處理硬件原理圖
1.2.1 過流、負序電流與零序電流的故障判據
對三相異步電動機不對稱故障進行判斷的常用方法是對稱分量法[1]。用對稱分量法分析三相異步電動機的不對稱問題時能夠使計算大大簡化。把三相電流經過計算后分解成正序分量、負序分量和零序分量,然后根據所發生的故障類型進行判斷,通過判斷得到的數據對所發生的故障進行斷電保護。這種方法既靈敏又可靠,還能判斷出電機所有常見故障,同時能夠判別出相應的故障類型,實現對故障的診斷。原理框圖如圖2所示。

圖2 電動機故障診斷及保護原理框圖
1.2.2 改進后的全波傅里葉算法
電機保護裝置要實時獲取電壓和電流數據,及時響應各種故障狀態,準確地做出保護反應。在故障發生以后的瞬間,信號里面含有直流分量和很多諧波分量,信號發生了畸變。很多保護裝置都是建立在整數次諧波之上,通過一定的算法處理得到的基波和諧波分量[4],進而實現故障檢測。算法是對交流采樣信號參數的一個估計運算,所以算法性能的好壞還要看數據窗的長短,從采樣值中提取出有用信號。為能讓保護快速的動作,一定要選擇數據窗較短的算法。
輸入量通常認為是由衰減后的非周期分量、基頻與倍頻分量所組成。最具有代表性的就是傅氏算法和它的推廣算法。一般假設一個輸入信號是周期信號,除基波外還有不衰減的直流分量和各次諧波,用公式可以表示為:

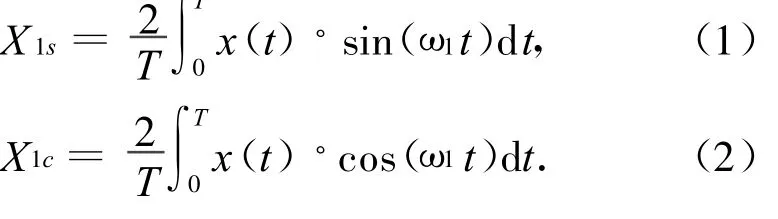
在進行故障分析時,只需要分析基波分量就行,基波分量為:
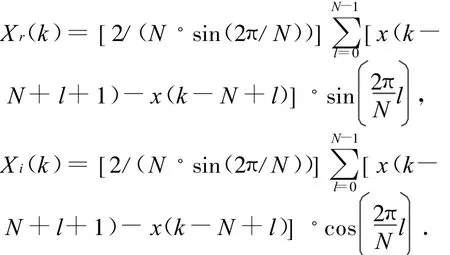
經采樣后的連續變量分解成為離散變量,積分運算變成求離散和的形式。如果每周波采樣設為 N次,在進行矩形積分時,則第k次采樣的電流基波分量的傅里葉級數中余弦系數值和正弦系數值分別為:

這樣就得到了離散系統的一般表達形式,這種算法幾乎能完全地濾掉直流和各整次諧波分量,但是對衰減的直流分量和頻率小于50 Hz的低頻分量抑制效果不是很好。為了去除直流分量的影響,一般都是在其前面加差分環節,形成全波差分傅氏算法,計算公式如下:
還有一種是半波傅氏算法,其數據窗很短,僅有半個周波,所以在計算量上要小得多。不過,這種算法的缺點是只能濾掉奇次諧波,而且精度和速度不能同時達到最佳,所以就要在速度和精度兩方面進行折中考慮。異步電動機保護對算法數據窗長度要求較低,于是用全波傅氏算法能夠得到很好的精度。又因為采用C語言編程,所以運算量最好小一些。基于上述情況,特別地對全波傅氏算法進行了改進,即給計算方法進行瘦身處理,計算當前k點保護算法的實虛部時,用前k-1點的計算結果就可以了。改進的算法如下:
如果在式(3)之前在加上差分環節就構成了全波差分傅氏遞推形式,公式為:
全波傅氏算法[2]的遞推形式和全波差分傅氏算法相比,頻率響應和時間響應差不多,但是算法經過瘦身處理,計算量減少了很多。
1.2.3 各序分量算法的實現
正序分量、負序分量和零序分量電流的保護,一般要從電流中計算出負序和零序分量,然后再根據序量和相量之間的關系,可以計算出序電流分量:


往后延了16點 -4/3π得來。同理α2I C也可看作IC對應的瞬時值延后采樣得來,這樣式(5)就可以寫為一周波24點的序分量瞬時值的表達式:

式(6)中,k是當前采樣點,于是得到當前采樣時刻的序分量i1(k)、i2(k)、i0(k)后,再經傅里葉算法得到序分量的有效值I1,I2,I0,進而就可以進行相關保護的判斷了。通過這樣處理,避免了復數的運算,又簡化了計算量,所以非常適合微機計算。
2 靜態模擬實驗結果與分析
本文通過靜態模擬試驗來檢驗掘進機電氣綜合保護各項指標是否滿足設計要求,同時測試傅氏算法和數據采集系統的效果和精度。在模擬實驗過程中,分別對裝置的動作電流值和動作時間進行了檢測。主要是給出不同的整定值,看各種保護在不同整定值下實際動作的數值。本文仍以截割電機三相電流保護為例,其靜態模擬實驗的具體數值如表1所示。經過分析,其相對誤差和技術誤差均在要求范圍內。
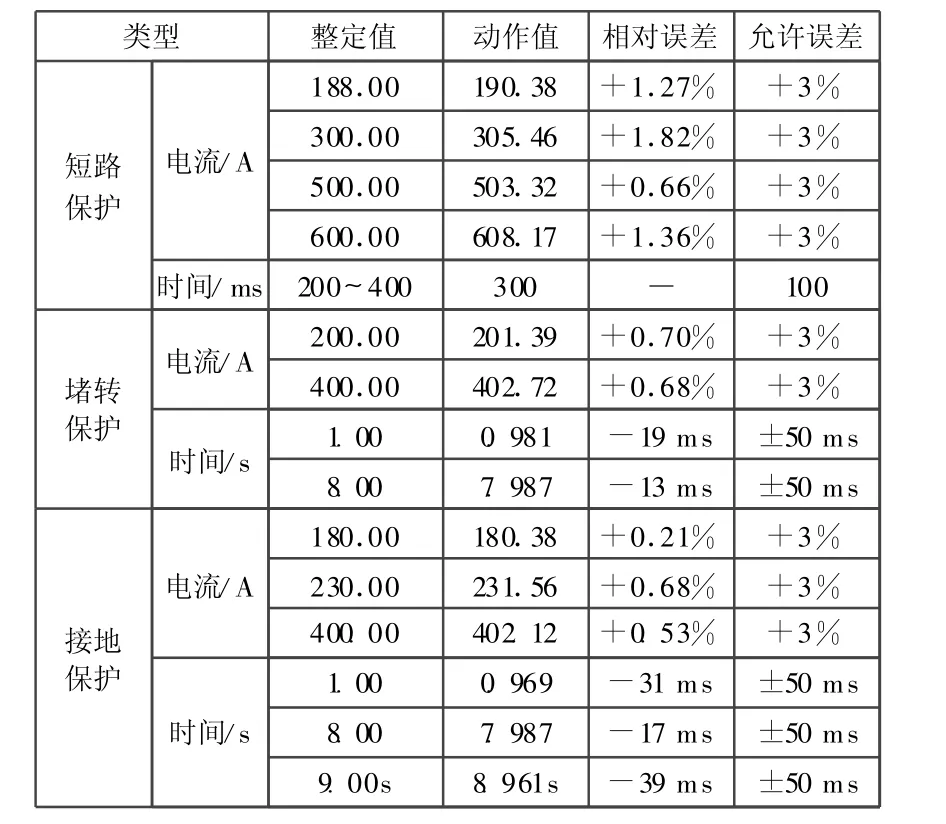
表1 截割電機三相電流保護數據
3 結束語
掘進機電氣綜合保護不僅要求保護動作的可靠性,還要保證測控的準確性和實時性。本文通過對掘進機電氣保護數據采集方法的研究,并通過靜態模擬試驗的數據分析可以看出,電流和動作時間的最大測量誤差在額定值時均不會超過±0.5%,可以滿足監控的精度要求。參考文獻:
[1] 郭香云,邊冰.用對稱分量法分析三相異步電動機的斷相運行[J].河北理工學院學報,2004(2):84-87.
[2] 諸佳云.傅氏算法在電力系統繼電保護中的應用[J].電工電氣,2009(12):28-30.
[3] 伍道明.基于單片機的數據采集與控制系統[J].化工職業技術教育,2006(3):26-29.
[4] 程璋,李永堅,汪超.利用傅氏算法求取正確的基波及諧波分量初始角方法的研究[J].廣東輸電與變電技術,2005(2):13-17.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
中國生殖健康(2019年3期)2019-02-01 06:12:26
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34