基于廣義Hough變換的航跡關(guān)聯(lián)算法
2011-04-26 08:31:40湯子躍段樹森曾劍新
艦船電子對抗 2011年1期
關(guān)鍵詞:關(guān)聯(lián)
張 斌,湯子躍,段樹森,曾劍新
(1.空軍雷達(dá)學(xué)院,武漢 430019;2.解放軍93251部隊,齊齊哈爾 161000)
0 引 言
航跡與航跡的關(guān)聯(lián)是用于確定幾個不同傳感器的航跡來自同一個目標(biāo),通常應(yīng)用在分布式信息處理系統(tǒng)中,來解決傳感器空間覆蓋區(qū)域中的重復(fù)跟蹤問題,因而,航跡關(guān)聯(lián)過程也稱為去重復(fù)。統(tǒng)計航跡關(guān)聯(lián)法和模糊航跡關(guān)聯(lián)法是現(xiàn)有的兩大類航跡關(guān)聯(lián)方法。統(tǒng)計法在目標(biāo)密集,分叉或分岔航跡較多,機(jī)動目標(biāo)較多,系統(tǒng)包含有較大的導(dǎo)航、傳感器校準(zhǔn)及轉(zhuǎn)換和延遲誤差的場合下,要判斷來自2個局部節(jié)點的航跡是否屬于同一個目標(biāo)是很困難的,錯誤關(guān)聯(lián)較多,有時甚至不能滿足要求;模糊法的最大缺點是系統(tǒng)參數(shù)設(shè)置復(fù)雜,精確性和快速性難以同時滿足。
1962年,P.V.C.Hough根據(jù)數(shù)學(xué)對偶性原理提出了檢測圖像直線的方法,現(xiàn)已發(fā)展成為一種應(yīng)用較為成熟的圖像邊緣檢測技術(shù),具有良好的抗噪聲性能。1981年,D.H.Ballard提出了非解析任意形狀的R表法,有效地將Hough變換推廣到對非解析的任意形狀的識別,被稱為廣義Hough變換法(GH T)。
徐毓教授在文獻(xiàn)[5]~[7]中把Hough變換成功引入到雷達(dá)數(shù)據(jù)關(guān)聯(lián)領(lǐng)域,取得了較好的實驗效果。本文在前人基礎(chǔ)上,探討了基于廣義Hough變換的航跡關(guān)聯(lián)算法,并通過仿真試驗,證明了該方法的有效性。
1 基本原理
在所需檢測的曲線或目標(biāo)輪廓沒有或不易用解析式表達(dá)時,可以利用表格來建立曲線或輪廓與參考點間的關(guān)系,從而繼續(xù)利用Hough變換進(jìn)行檢測,這就是廣義Hough變換的基本原理。
這里的參考表格就是所說的R表,是參考點與曲線輪廓點的對應(yīng)關(guān)系,避免了使用解析式,如圖1所示。先在所給輪廓內(nèi)部取一個參考點(p,q),對任意一個輪廓點(x,y),令從(x,y)到(p,q)的矢量為r,r與X軸正向夾角為φ,做出過輪廓點(x,y)的切線和法線,令法線與X軸正向的梯度角為θ,使r和φ都是θ的函數(shù),從而使每個輪廓點在參考點(p,q)下都對應(yīng)著一個梯度角,但是,一個梯度角可能對應(yīng)多個輪廓點,對應(yīng)點的數(shù)量與輪廓形狀和θ的量化間隔Δθ有關(guān)。
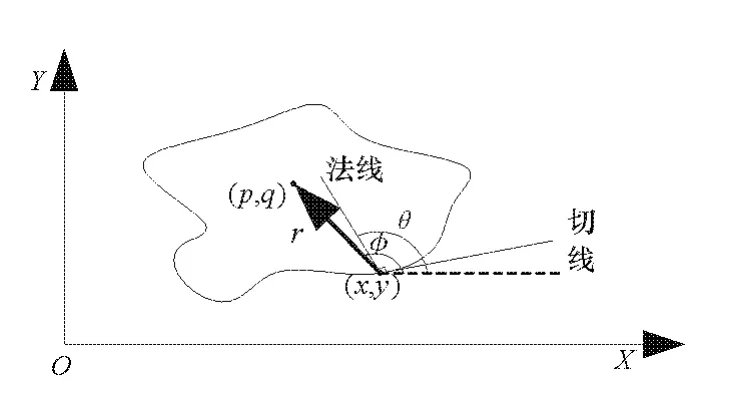
圖1 參考點和輪廓點的對應(yīng)關(guān)系圖
2 算法步驟
(1)把目標(biāo)航跡時空統(tǒng)一后,顯示成灰度圖,分別定為模板圖和目標(biāo)圖。
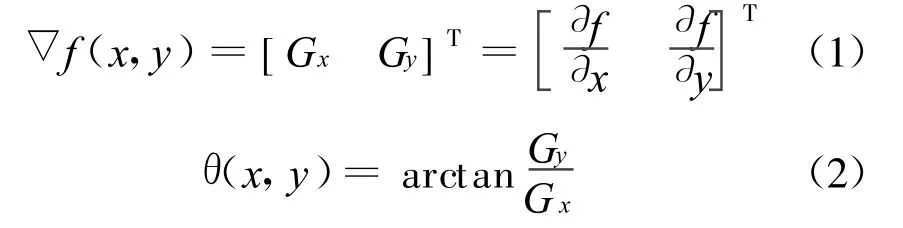
(2)求梯度角θ,梯度算子比較常用的有Prewitt算子和Sobel算子,其中后者效果較好,應(yīng)用最廣泛,本文亦采用這種算子求梯度的沿X方向的導(dǎo)數(shù)Gx和沿Y方向的導(dǎo)數(shù)Gy,進(jìn)而求梯度角θ(x,y)如下:
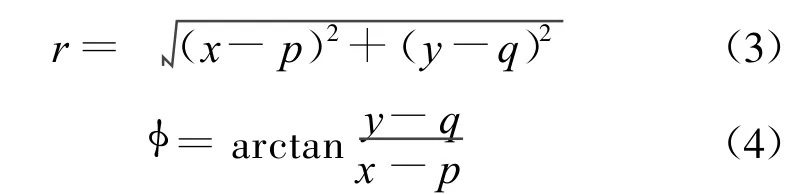
(3)求模板圖上每個輪廓點到參考點(p,q)的距離r和r與X軸正向的夾角φ:
(4)根據(jù)r,φ與θ的關(guān)系,做出一個參考表,如表1所示。其中θ為目錄,r和φ為內(nèi)容,M為梯度角θ的個數(shù),N為航跡點數(shù)。
(5)對目標(biāo)圖中的每個灰度為1的點(可能存在的輪廓和一系列雜波點)求梯度角同步驟(2),并以此值檢索參考表,通過下式求得


(6)A中的最大值即是目標(biāo)圖中存在的待檢輪廓的參考點,接下來整個輪廓的位置以及形狀就可以確定了。

表1 參考表
3 仿真結(jié)果分析
采用Matlab進(jìn)行200次蒙特卡洛仿真實驗,驗證算法有效性。假設(shè)傳感器A和傳感器B的過程噪聲υ(k)和測量噪聲 ω(k)都服從高斯分布,且相互獨(dú)立。其中,傳感器A的過程噪聲υA(k)~N(0,25),測量噪聲 ωA(k)~N(0,100);傳感器B的過程噪聲υB(k)~N(0,30),測量噪聲 ωB(k)~N(0,200)。圖2和圖3分別是來自不同的傳感器A和B的航跡,圖中直線為勻速直線運(yùn)動目標(biāo)的航跡,曲線是機(jī)動目標(biāo)的航跡。
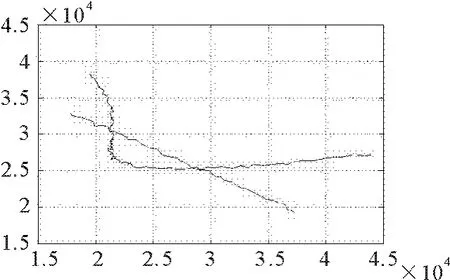
圖2 來自傳感器A的航跡
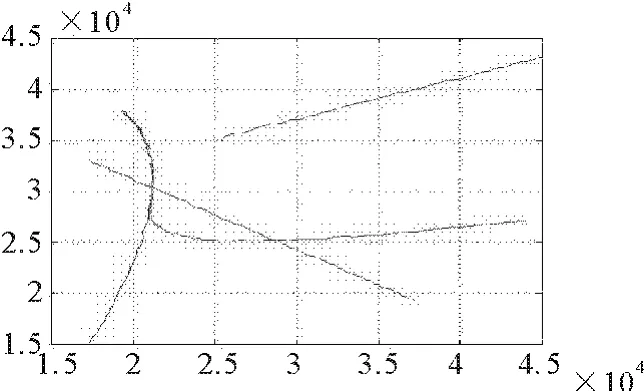
圖3 來自傳感器B的航跡
圖4是由傳感器A航跡制成的模板二值灰度圖,圖5由傳感器B航跡制成的目標(biāo)二值灰度圖。
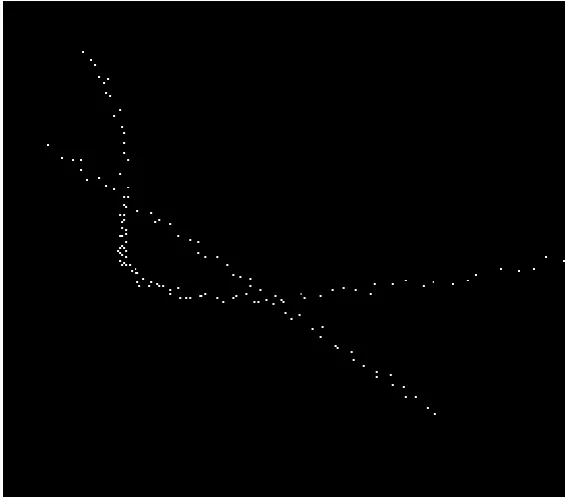
圖4 模板圖
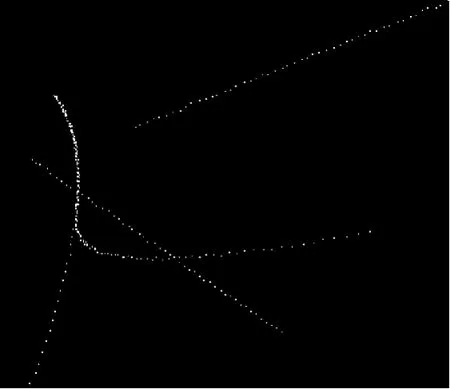
圖5 目標(biāo)圖
圖6是變換到GH T參數(shù)空間的累加器顯示圖,圖7是變換到GH T參數(shù)空間的累加器三維顯示圖,圖8為航跡融合圖。
圖6 參數(shù)空間顯示
4 結(jié)束語
本文研究了廣義Hough變換在航跡關(guān)聯(lián)中的應(yīng)用問題。利用廣義Hough變換的特性,仿真實現(xiàn)了不規(guī)則曲線航跡的關(guān)聯(lián),并對影響關(guān)聯(lián)效果的因素進(jìn)行了分析。
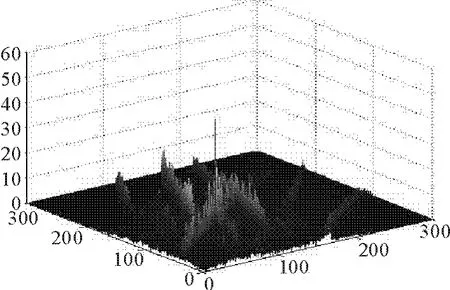
圖7 參數(shù)空間的三維顯示
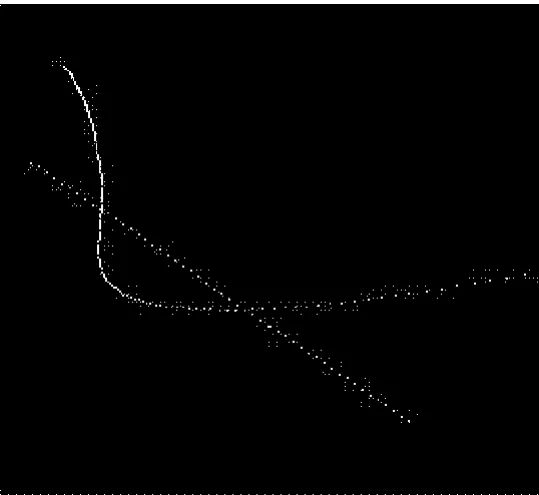
圖8 航跡融合圖
下一步,可從正確關(guān)聯(lián)概率、錯誤關(guān)聯(lián)概率、漏關(guān)聯(lián)概率等角度與其它算法進(jìn)行對比研究;在提高算法的適時性和魯棒性方面探索改進(jìn)算法。
[1] 侯雪梅,胡飛.多傳感器多目標(biāo)航跡關(guān)聯(lián)算法研究[D].西安:西北工業(yè)大學(xué),2006.
[2] 何友,王國宏,陸大钅金,等.多傳感器信息融合及應(yīng)用[M].北京:電子工業(yè)出版社,2000.
[3] 章毓晉.圖像工程[M].北京:清華大學(xué)出版社,2005.
[4] 徐毓,楊瑞娟,李鋒.Hough變換與數(shù)據(jù)融合[J].現(xiàn)代雷達(dá),2001,23(6):16-18.
[5] 徐毓,葉斌.HOUGH變換與航跡關(guān)聯(lián)[J].火力與指揮控制,2002,27(4):12-14.
[6] 張萍,徐毓,張楠,等.基于 Hough變換的航跡關(guān)聯(lián)算法[J].計算機(jī)測量與控制,2006,14(1):98-99.
[7] 姚立健,丁為民,趙三琴,等.廣義Hough變換在遮擋圖像識別中的應(yīng)用[J].農(nóng)業(yè)工程學(xué)報,2008,24(12):97-101.
猜你喜歡
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:30
當(dāng)代陜西(2021年17期)2021-11-06 03:21:36
原道(2020年2期)2020-12-21 05:47:06
當(dāng)代陜西(2019年15期)2019-09-02 01:52:00
中國非營利評論(2018年2期)2018-06-18 10:48:50
學(xué)苑創(chuàng)造·A版(2018年11期)2018-02-01 06:29:20
自動化學(xué)報(2017年1期)2017-03-11 17:31:17
讀者(2017年5期)2017-02-15 18:04:18
西藏科技(2016年5期)2016-09-26 12:16:39
振動工程學(xué)報(2015年1期)2015-03-01 01:15:42