甜菜紙筒育苗移栽機械化技術
2011-03-24 09:23:06盧秉福楊驥
中國糖料 2011年3期
盧秉福,楊驥
(1.黑龍江大學農作物研究院,哈爾濱150080;2.中國農業科學院甜菜研究所,哈爾濱150080)
甜菜紙筒育苗移栽機械化技術
盧秉福1,2,楊驥1,2
(1.黑龍江大學農作物研究院,哈爾濱150080;2.中國農業科學院甜菜研究所,哈爾濱150080)
介紹了甜菜紙筒育苗機械化的主要設備及其工藝流程,闡述了甜菜紙筒育苗移栽的技術要求及甜菜移栽機的類型和工作原理。實現甜菜紙筒育苗移栽機械化不僅能夠保證甜菜紙筒秧苗的移栽質量,而且能夠提高勞動生產率,已成為甜菜生產的必然選擇。
甜菜;紙筒育苗;機械化
甜菜紙筒育苗移栽技術是1956年日本甜菜糖業公司農事研究部增田昭芳博士首創[1],具有增加有效積溫,延長生育期,保證甜菜種植密度,增強甜菜抗逆性,實現規范化栽培等優點。尤其是在中輕度鹽堿地上種植甜菜,采用紙筒育苗移栽技術可獲得高產,甚至在重鹽堿地塊種植也能獲得較好的產質量。
我國于1981年從日本引進該項技術,首先在黑龍江省進行試驗,與此同時,黑龍江、吉林、內蒙古等省、自治區多次派譴技術人員赴日本研修甜菜紙筒育苗移栽技術,隨著甜菜紙筒育苗移栽面積的迅速擴大,甜菜單產、總產均有很大提高[2]。近年來隨著農村勞動力成本的迅速上升,對甜菜紙筒育苗移栽機械化技術提出了更高的要求,為保證甜菜紙筒育苗移栽技術的推廣應用,實現甜菜紙筒育苗移栽機械化已成為必然選擇。
1 甜菜育苗紙筒
甜菜育苗紙筒分為特1號和1號兩種規格。特1號紙筒直徑1.9cm,長15cm,適于壟作地區使用;1號紙筒直徑1.9cm,長13cm,適于平作地區使用。每冊均為1400個紙筒。這種育苗紙筒不用時可以折疊起來,育苗時將紙筒展開,放在墊板上裝入營養土,然后播種、覆土和灌水,放入塑料大棚內育苗。育苗紙筒紙為專用合成紙,有的是在牛皮紙漿中加10%~30%的親水性維尼龍纖維和少量防腐劑及肥料制成。粘貼用粘合劑要保證育苗期內紙筒不脫粘,栽植時又容易撕開。
2 甜菜紙筒育苗機械設備
2.1 床土篩分與肥料混配機
先將上年取好的或新準備的床土按一定比例放入輸送機上,由輸送機把原土加入碎土機。在高速旋轉的滾筒碎土刀打擊下,通過碎土刀與凹板的擠搓后,拋在碎土板上撞擊破碎;破碎的土壤,經由振動篩分離,未碎的較大土塊,則經篩面從大土塊出口送出,細碎土粒通過篩網落在滑土板上滑出機外,沿著輸送帶進入填土機。碎土機輸送帶的上方有可控制肥料流出量的肥料槽,肥料槽流出的肥料與碎土機輸出的床土進行初步混合。
2.2 土壤肥料攪拌機
土壤肥料攪拌機用于將土壤和肥料攪拌均勻。裝有一定數量的交錯排列鉤形刀的滾筒在料斗內回轉時,可進一步松碎土壤和肥料,并且進行攪拌。混合均勻后,轉動料斗,將土肥倒出斗外,螺旋推運器將配制好的床土均勻加入甜菜育苗紙冊。
2.3 蹾土機
蹾土機翻轉臺上安裝突起板,掛接紙冊,通過蹾土機振動將土蹾實,翻轉后撤掉突起板,再進行播種作業。表1為幾種甜菜紙筒育苗主要設備技術參數[3]。

表1 甜菜紙筒育苗主要設備技術參數
2.4 甜菜紙筒育苗播種機
甜菜紙筒育苗播種機主要使用氣力播種機。工作時,甜菜種子被快速地撒在吸種板上,通過吸氣裝置使板上每個孔眼吸附1粒甜菜種子,剩余甜菜種子流回板的下面。將吸種板轉動到漏種板處時,通過控制裝置,去除真空吸力,甜菜種子便自吸種板孔落下,通過漏種板孔及下方的輸種管落入各個相對應的紙筒內,然后覆土和澆水。這種播種機適用于紙筒的單粒點播,能有效地吸附各種顆粒狀的甜菜種子,也能吸附非顆粒狀的種子,如未經加工的甜菜單粒種等。有利于機械化作業,生產率較高。要求種子籽粒飽滿,發芽率高,干凈。
3 甜菜紙筒育苗工藝流程
用以育苗的土經過嚴格的消毒和調整pH值,稱為原料土。原料土通過帶施肥機構的原料土輸送機,輸送到碎土去石機。經過施肥、松碎、去石后制成床土,床土經輸送機輸送到裝土機(圖1)[4]。與此同時,裝在特制塑料架內,底部盛有凸起板的展開了的紙筒組合(一冊紙筒,一個架子)也被送到裝土機下,裝土機給紙筒裝土,裝的土高出于紙筒約5cm,通過滑道送到墩土機,墩土機將裝入紙筒的土墩實,同時將上面多余的土刮平。通過滑道送到翻轉機,翻轉機將紙筒組合翻轉1800,凸起板被翻轉到上面,取走凸起板,每個紙筒上就留下了一個凹坑。通過滑道送到育苗播種機,在每個凹坑內播下1粒單胚種,通過滑道送到覆土工作臺上,將床土覆蓋在上面、刮平,裝入專用的車上送入育苗設施內。該育苗成套設備每小時可完成60冊紙筒的裝土、播種任務,一天可處理8~10hm2所需要的苗。

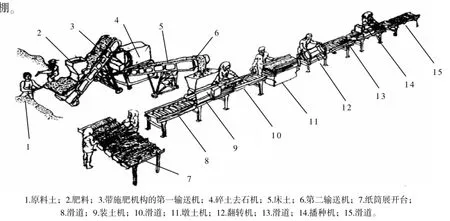
圖1 甜菜紙筒育苗裝土、播種工藝流程
4 甜菜紙筒育苗移栽機械
4.1 甜菜紙筒育苗移栽的農業技術要求
甜菜秧苗的栽植方法,一般是先開穴或開溝,按預先計劃好的距離栽下,覆土后壓緊和澆水,待水全部滲下去以后,在定植穴的表面覆以細干土[5]。機械栽植要求把上述工藝過程全部或把主要部分一次完成。工作時應滿足以下農業技術要求:第一,甜菜株行距和栽植深度均勻一致;第二,保證甜菜秧苗基本上垂直地面,傾斜度一般不應超過30°,無窩根現象;第三,避免傷秧,在紙筒栽植時,不應有嚴重破壞紙筒的現象;第四,無漏植和重植。
4.2 甜菜紙筒育苗移栽機的類型及工作原理
甜菜幼苗長到一定大小后,就要進行田間移栽。甜菜紙筒育苗移栽機的種類很多,按自動化程度可分為人力紙筒育苗移栽機、半機械化紙筒育苗移栽機和全自動紙筒育苗移栽機。按栽植器的形式又可分為鏈夾式、鉗夾式、撓性圓盤式、吊籃式、導苗管式和帶式等紙筒育苗移栽機。目前國內廣泛使用的紙筒育苗移栽機絕大多數是半自動化甜菜紙筒育苗移栽機和少量日本進口的全自動化甜菜紙筒育苗移栽機。主要機型有:國產的2ZT-2型、2ZTK-2型以及日本進口的HB-SS20型、HBT-40型、CT-4S型、CT-2S型、BTP-2型、BTP-4型甜菜紙筒育苗移栽機等[6-8]。甜菜紙筒育苗移栽具有栽后沒有緩苗期,成活率高等優點,在實際應用中取得了很好的效果。
半機械化鴨嘴式甜菜紙筒育苗移栽機主要由爪手、栽植圓環、偏心圓環、滑道等部件組成。栽植圓環與轉軸固定,在圓環側面裝有栽植爪手,軸轉動時帶動栽植圓環一起旋轉。偏心圓環是保證爪手作平行運動的主要部件,它通過偏心板與栽植圓環聯結,并保持水平向前50mm的偏心。栽植爪手由兩個爪片組成,爪片張開靠滑道的作用,關閉則靠彈簧的作用。
栽植器的工作過程為:機組前進時,開溝器破土成溝,紙筒秧苗由人工喂入旋轉的爪手里。栽植爪手在偏心圓環的作用下,始終垂直于地面,當運行到接近于最低位置時,栽植爪手在滑道的作用下被張開,紙筒秧苗落入溝中。部分土壤從開溝器兩側尾部滑至紙筒秧苗周圍,其余的土壤靠覆土器推送覆蓋紙筒秧苗根部。脫離滑道控制的栽植爪手靠彈簧作用自行合攏。為了使紙筒秧苗栽入溝中保持直立,栽植爪手始終應做垂直于地面的運動,當轉至最低位置投放紙筒秧苗時,爪手的線速度應該與機器前進速度相等,方向相反,即投入紙筒秧苗時,爪手絕對速度接近于零,才能保證紙筒秧苗平穩落入溝內[9]。
全自動甜菜紙筒育苗移栽機的工作原理:當機器前行時,平土器刮開表土,其后的開溝器破土成溝,操作者把紙筒苗放到喂苗傳送帶上,苗的根部朝向操作者。排列好的紙筒苗被傳送帶依次傳送,經苗檢測皮帶對紙筒的夾持,空苗或弱苗被去除,好的苗最后被傳輸給橡膠圓盤。被橡膠圓盤夾住的紙筒苗隨著圓盤向下轉動,然后被垂直放到由開溝器開出的溝里。紙筒被投入溝中的瞬間,隨著機器的前進由開溝器兩側尾部回土及溝兩側自動回土把紙筒穩住在溝里,同時開溝器后的圓盤覆土器繼續覆土,將紙筒埋住。
4.3 紙筒育苗移栽機前進速度的確定
甜菜紙筒育苗移栽機工作時的前進速度Vm取決于規定的株距S(mm)和喂入量Q(棵/分),即:

由上式可以看出,當要求株距一定時,機器的前進速度Vm與栽植手喂入量Q有關。一個栽植手一般每分鐘喂入45棵左右,當要求株距為S=200~280mm時,則Vm=0.54~0.76km/h。
4.4 甜菜紙筒苗移栽株距的調節
紙筒育苗移栽機多數采用鏈條傳動,以地輪為驅動輪,通過鏈條帶動栽植器工作。機器工作時,地輪走過的距離應等于所栽秧苗株數與株距的乘積,如果再考慮地輪打滑率δ,則:πD地n地(1+δ)=S·C·n栽

由上式可知,傳動比i為地輪轉速n地與栽植器主動鏈輪轉速n栽之比值。株距S及秧夾數C與傳動比i成正比,與地輪直徑D地成反比。對一臺機器來說D地和秧夾數C基本上是確定的,因此,調節株距通常用改變傳動比的辦法來實現,即采用更換主、被動鏈輪的辦法進行調節。
5 結論
移栽機結構雖然不十分復雜,但設計巧妙,制造精細,工藝要求高。目前生產中使用最多約占80%~90%的是機引雙行移栽機,配套動力14.7~29.4kW拖拉機,需駕駛員1人,分苗、供苗每壟2人,由苗床裝箱及倒運1~2人,一般需6~7人組成1個作業組,每天可移栽1.5~2hm2。為了減少人工,移栽機目前正向全自動發展,只需要拖拉機駕駛員1人和1~2人苗床裝箱倒運[10]。機械移栽甜菜紙筒秧苗栽得直、深度一致,株、行距一致,所以種植均勻,機械移栽較人工移栽效率可提高8~10倍。
[1]楊驥,韓秉進.日本甜菜生產考察報告[J].中國糖料,2010(4):83-86.
[2]盧秉福,張祖立.甜菜生產機械化的研究進展及發展趨勢[J].農機化研究,2007(1):59-62.
[3]王立濤,趙勝雪,藤紅英.甜菜機械化紙筒育苗移栽[J].新疆農機化,2009(1):22-23.
[4]陳光樂.日本甜菜機械考察報告[J].中國甜菜,1984(1):50-56.
[5]李剛,秦樹才.發揮“龍頭”企業優勢加速甜菜產業化進程[J].中國糖料,2004(1):60-63.
[6]年玉寶,郭瑞,菅晨光,等.日本CT-4S和CT-2S型甜菜紙筒育苗移栽機的試驗示范[J].中國糖料,2004(2):32-35.
[7]東洋農機株式會社.ビ-ト栽培の機械化[R].1980.
[8]杜義.日本甜菜糖業管理[M].哈爾濱:黑龍江科學技術出版社,1990.
[9]蔣恩臣.農業生產機械化[M].北京:中國農業出版社,2003.
[10]趙鳳梧,王志德,年玉寶,等.建設“三高四化”甜菜產業化基地的框架[J].中國糖料,2004(4):54-57.
Mechanization Technique for Sugarbeet Paper Pot Seedling Transplanting
LU Bing-fu1,2,YANG Ji1,2
(1.Crops Research Institute of Heilongjiang University,Harbin 150080,China; 2.Sugarbeet Research Institute of Chinese Academy of Agricultural Sciences,Harbin 150080,China)
The main equipments and technologic process for mechanization of sugarbeet paper pot seedling, expounded technical requirements,types of machines and work theory for sugarbeet paper pot seedling transplanting were introduced.Mechanization of sugarbeet seedling transplanting was realized which could not only ensure the quality of sugarbeet paper pot transplanting seedlings,but also increase productivity,it has become an inevitable choice for sugarbeet production.
sugarbeet;paper pot seedling;mechanization
S566.3
A
1007-2624(2011)03-0068-03
2010-12-02
農業部“948”項目(2010-C8)資助。
盧秉福(1963-),男,吉林省梅河口市人,博士、研究員。
