采用模糊控制的垂直型旋轉式倒立擺系統
2011-03-16 07:41:38王春生侯云海劉凡
長春理工大學學報(自然科學版) 2011年2期
王春生,侯云海,劉凡
(1.長春市政瀝青混凝土有限公司,長春 130123;2.長春工業大學,長春 130012)
在自動控制系統中,以倒立擺為控制對象的自動調節系統因組成結構簡單、控制方法便于調整驗證、控制性能和結果直觀,特別可以直接地模擬機器人關節控制、火箭發射架姿態控制、航空飛行器的陀螺平衡控制等過程,故作為一種時變的非線性控制對象,在進行控制方法和有效驗證各種新型理論的應用研究上,作為基礎試驗模型常被采用。例如為之開發的單支點直線倒立擺;雙支點小車倒立擺;單級、二級直線倒立擺;單級、多級旋轉倒立擺等。因倒立擺系統是一個典型的時變非線性系統,故對此所采取的理論研究和控制方法研究也比較多,一般對單支點系統,多在平衡點附近線性化,之后采用線性控制理論方法進行系統設計與控制的研究。但隨著自動控制系統中被控對象復雜程度的加深,很難建立起被控對象的精確的數學模型,因此傳統的控制方法很難滿足現代化需要,而模糊控制、人工智能神經網絡是解決這類問題的有效工具,也是目前應用研究的主流和熱點[1-3]。
采用步進電機驅動平衡臂,通過平衡臂的旋轉、擺動控制思想做成了一個單支點垂直型旋轉式倒立擺的系統模型。以倒立擺的回轉角、角變化率為控制輸入量,采用模糊決策控制方法,通過調節旋轉臂的轉速、轉向,即電機的轉矩、轉向實現倒立擺的控制。
1 倒立擺的動力學模型
圖1是本系統制作的單支點旋轉式倒立擺的示意圖。采用步進電機作為旋轉系統的控制執行元件,旋轉臂通過滑環與電機軸固定聯接,其中一端安裝有光電編碼器實現位移檢測,倒立擺通過軸承與固定在旋轉臂上的光電編碼器聯接。通過檢測倒立擺的轉角位移及轉角變化率,經過控制系統的模糊控制規律判決,輸出電機的控制信號,調節電機的旋轉速度、方向和角度,從而實現了倒立擺的平衡控制。
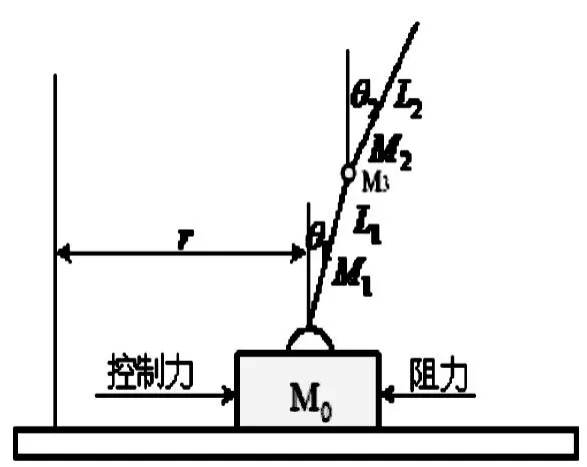
圖1 旋轉倒立擺示意圖Fig.1 Diagram of verticalrotary inverted pendulum
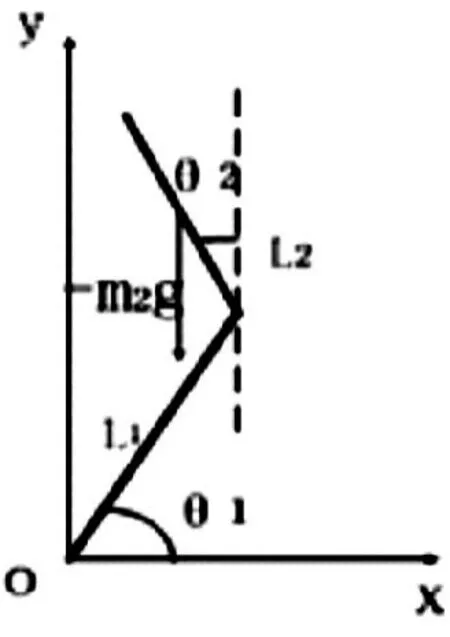
圖2 基本坐標系Fig.2 The basic reference frame
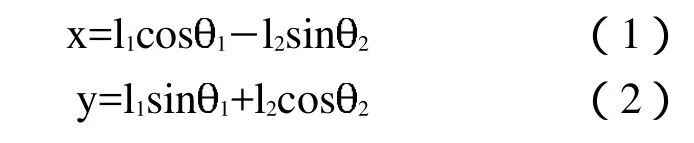
為推導倒立擺系統的運動狀態及動力學模型,取電機旋轉軸為坐標原點,水平面內取 x,y軸,假定電機及倒立擺逆時針旋轉為轉角的正方向,如圖2所示。系統具有兩個自由度,選取1,2為廣義坐標,則在任意時刻,倒立擺重心位置的坐標可用下式來描述。
系統的動能K可表示如下:

選取擺、臂在垂直位置為零勢能位置,則系統的勢能為:

把(3),(4)式代入拉格朗日方程[4]

可得系統的運動方程式:
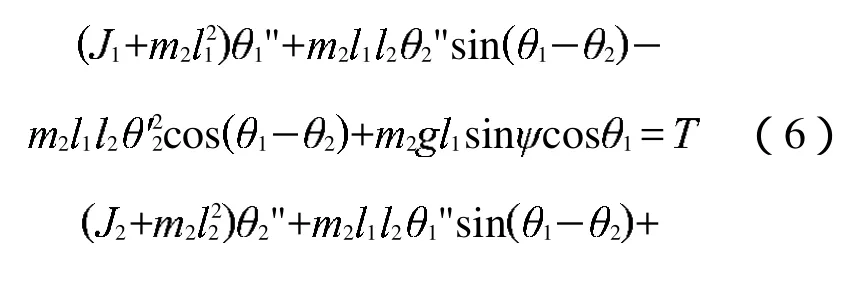

由運動方程可知,此系統是一個多變量、高階次、非線性的復雜系統。假設倒立擺的擺動幅度很小,可認為且忽略高相,則式(6),(7)可化為:


對(10)、(11)兩式進行拉普拉斯變換可得:
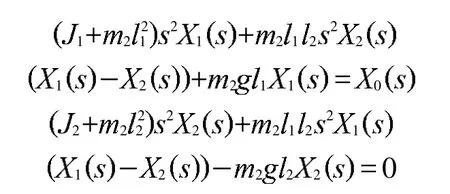
由上式可知,整理后的傳遞函數非常繁瑣,因此本設計采用模糊控制法。
2 圖形建模與仿真
為便于構圖,將式(10)、(11)改寫為下列形式:

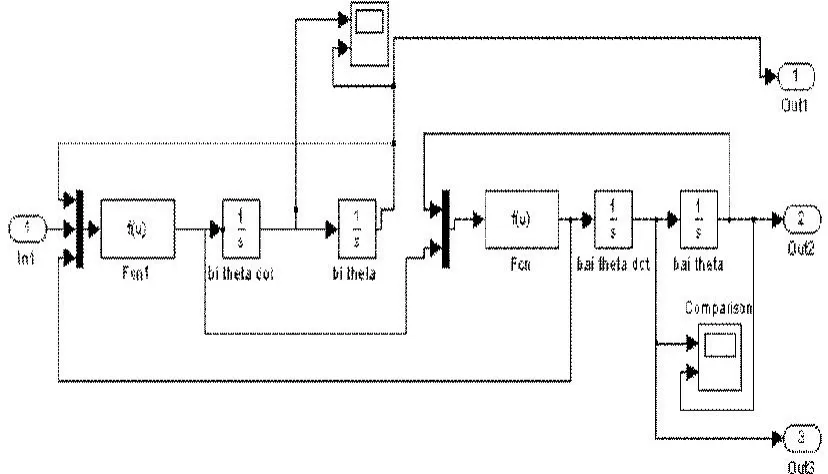
圖3 倒立擺的動力模型仿真結構圖Fig.3 The simulation frame of dynamic model for inverted pendulum
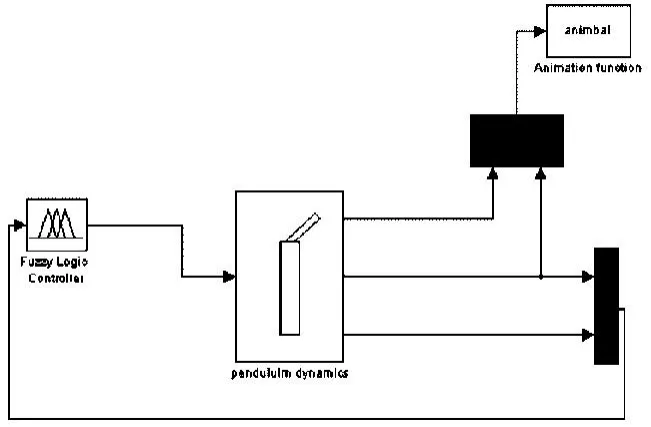
圖4 倒立擺模糊控制系統模型Fig.4 The model of fuzzy control systemfor inverted pendulum
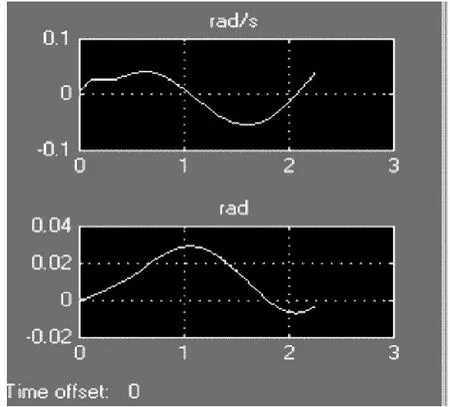
圖5 平衡臂的仿真結果Fig.5 The simulation result of balance arm
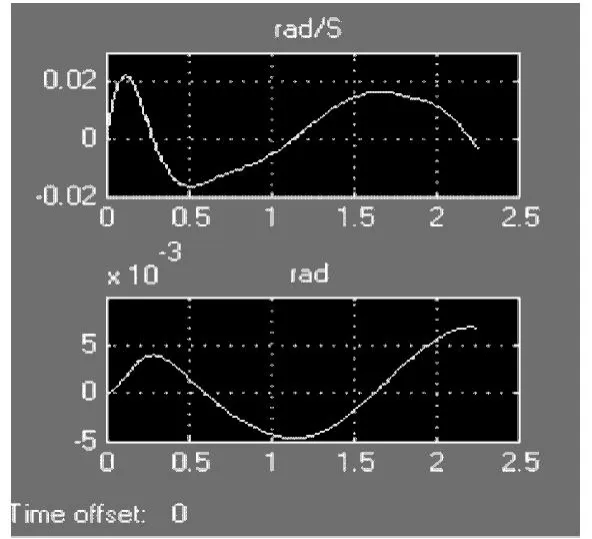
圖6 擺的仿真結果Fig.6 The simulation result of pendulum

根據(12)、(13)兩式,在 MATLAB中畫出仿真結構圖如圖3所示。
利用模糊邏輯控制塊及圖3,可得出倒立擺模糊控制系統模型,如圖4所示。其中圖3為圖4中"pendulum dynamics"的子系統,其"animbai"為擺的仿真函數[5]。
圖3,4是在Simulink環境下,應用S函數及模糊邏輯工具箱產生的模糊邏輯控制塊,針對系統運動狀態空間方程建立的倒立擺模糊控制系統模型[6]。由圖3,4得仿真結果如下圖5,6所示。
由仿真結果可知擺能夠在小角度范圍內穩定擺動,實現了對擺的控制。
4 結論
本文基于拉格朗日動力學分析方法,推導出倒立擺的運動方程。在對系統進行可行的近似化處理后,給出了便于實現的簡化控制關系模型。以倒立擺的回轉角,角變化率為控制輸入量,采用模糊控制方法實現了倒立擺的平衡控制規律。并通過MATLAB仿真實驗確認了該控制方法的可行性。不但初步解決了倒立擺非線性系統的控制問題,同時也可應用到多級雙支點倒立擺的控制系統中。
[1]哈爾濱工業大學理論力學教研組.理論力學[M].北京:高等教育出版社,2003.
[2]楊振強,程樹康,樸營國.二級倒立擺的遞階模糊神經網絡控制[J].電機與控制學報,2002,6(3):246-248.
[3]劉妹琴,廖曉聽,陳際達,等.用進化RBF神經網絡控制二級倒立擺[J].控制理論與應用,2008,12(4):593-596,600.
[4]Chih-Min Lin,Yi-Jen Mon.Decoupling Control by Hierarchical Fuzzy Sliding-Mode Controller[J].IEEE Trans.on control systems technology,2005,13(4):593-598.
[5]聞心,周露.MATLAB模糊邏輯工具箱的應用和設計[M].北京:科學出版社,2001.1
[6]馮冬青,謝宋和.模糊智能控制[M].北京:化學工業出版社,2000:95-100.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
當代陜西(2022年5期)2022-04-19 12:10:18
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:28
湘潮(上半月)(2021年4期)2021-07-20 08:05:28
汕頭大學學報(自然科學版)(2020年4期)2020-12-14 07:05:00
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
意林原創版(2016年10期)2016-11-25 10:28:30
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
