基于dSPACE平臺(tái)的穩(wěn)瞄控制系統(tǒng)建模方法研究
2011-02-22 08:06:20胥青青吳玉敬張璟玥姜世洲
兵工學(xué)報(bào) 2011年11期
胥青青,吳玉敬,張璟玥,姜世洲
(西安應(yīng)用光學(xué)研究所,陜西 西安710065)
機(jī)載光電穩(wěn)瞄系統(tǒng)常常要將光電傳感器(電視、紅外和激光測(cè)距機(jī))的視軸精確指向目標(biāo),以完成對(duì)目標(biāo)的捕獲、跟蹤及測(cè)量,配合武器系統(tǒng),完成對(duì)目標(biāo)的精確打擊。機(jī)載光電穩(wěn)瞄伺服控制系統(tǒng)是機(jī)載光電穩(wěn)瞄系統(tǒng)的重要組成部分,用來隔離載體的擾動(dòng),保證光電傳感器的視軸在慣性空間的穩(wěn)定。伺服控制系統(tǒng)的性能決定了機(jī)載光電穩(wěn)瞄系統(tǒng)的整體作戰(zhàn)效能。
對(duì)象模型是進(jìn)行控制系統(tǒng)設(shè)計(jì)的基礎(chǔ),模型建立的精確程度會(huì)直接影響控制系統(tǒng)設(shè)計(jì)效果。傳統(tǒng)的建模方法是物理建模法,該方法首先建立理論模型,然后對(duì)其中的參數(shù)進(jìn)行計(jì)算、測(cè)量和估算,最終得到控制對(duì)象的模型,但實(shí)際建模過程中往往存在控制對(duì)象某些參數(shù)難以實(shí)際測(cè)量,結(jié)構(gòu)體諧振、軸系摩擦和線纜擾動(dòng)等非線性因素難以準(zhǔn)確估算等問題,最終導(dǎo)致建立的模型和實(shí)際系統(tǒng)差別很大。本文提出一種頻域建模方法,該方法通過對(duì)控制系統(tǒng)進(jìn)行掃頻,然后采用最小二乘擬合方法對(duì)數(shù)據(jù)進(jìn)行處理,獲得對(duì)應(yīng)于該系統(tǒng)的頻率特性數(shù)據(jù),通過MATLAB 中的Ident 工具箱辨識(shí)頻率特性數(shù)據(jù),獲得與該頻率特性數(shù)據(jù)擬合精度較好地一個(gè)傳遞函數(shù),對(duì)該傳遞函數(shù)前向通道和反饋通道進(jìn)行分離,前向通道的傳遞函數(shù)較好地反應(yīng)了實(shí)際穩(wěn)瞄系統(tǒng)的模型。在該模型基礎(chǔ)上,本文還利用SISO 控制系統(tǒng)設(shè)計(jì)工具箱設(shè)計(jì)了速率穩(wěn)定回路控制器,取得了較好的控制效果。
1 基于dSPACE 平臺(tái)的建模方法
基于dSPACE 半實(shí)物仿真平臺(tái)的建模主要用dSPACE 和MATLAB 實(shí)現(xiàn),具體分為2 步:1)對(duì)控制對(duì)象掃頻后采用最小二乘法擬合頻率特性;2)利用MATLAB下的Ident 系統(tǒng)辨識(shí)工具箱辨識(shí)對(duì)象數(shù)學(xué)模型。
1.1 dSPACE 系統(tǒng)簡介
dSPACE 半實(shí)物仿真平臺(tái)是由德國dSPACE 公司開發(fā)的一套基于MATLAB/Simulink 的控制系統(tǒng)在實(shí)時(shí)環(huán)境下的開發(fā)及測(cè)試工作平臺(tái),實(shí)現(xiàn)了和MATLAB/Simulink 的無縫連接。dSPACE 由2 部分組成:1)硬件系統(tǒng),2)軟件環(huán)境。
dSPACE 硬件系統(tǒng)的主要特點(diǎn)是具有高速計(jì)算能力,包括處理器和I/O 接口等;本系統(tǒng)采用的硬件配置板卡包括處理器板DS1005、AD 轉(zhuǎn)換板DS2002和DA 轉(zhuǎn)換板DS2103.
dSPACE 軟件環(huán)境具有強(qiáng)大的功能,可以很好地完成控制算法的設(shè)計(jì)、測(cè)試和實(shí)現(xiàn),可以方便地實(shí)現(xiàn)代碼生成/下載和試驗(yàn)調(diào)試等工作。dSPACE 軟件環(huán)境主要由MATLAB/Simulink 和ControlDesk 組成。激勵(lì)信號(hào)、數(shù)據(jù)處理和控制器設(shè)計(jì)由MATLAB/Simulink 完成,調(diào)試由ControlDesk 實(shí)現(xiàn)。
將dSPACE 半實(shí)物仿真平臺(tái)和穩(wěn)瞄伺服控制系統(tǒng)相結(jié)合,可以非常快速地實(shí)現(xiàn)系統(tǒng)建模和控制器設(shè)計(jì)[1]。
1.2 頻率特性擬合方法
本文擬采用掃頻法建立系統(tǒng)數(shù)學(xué)模型[2-5]。該方法首先給系統(tǒng)輸入一個(gè)正弦掃頻信號(hào),并記錄輸出信號(hào),得到系統(tǒng)各頻率處的原始輸入和輸出,采用最小二乘法[1,7-8],對(duì)輸入的激勵(lì)信號(hào)數(shù)據(jù)和記錄的輸出信號(hào)數(shù)據(jù)處理,消除噪聲得到系統(tǒng)幅頻和相頻特性。
設(shè)系統(tǒng)輸入、輸出分別為

式中:A,B 分別為輸入、輸出信號(hào)的幅值;B/A 為系統(tǒng)傳遞函數(shù)的線性幅值;由于輸入信號(hào)的相位為0,所以φ 既是輸出信號(hào)的相位,也是系統(tǒng)傳遞函數(shù)的相位。
由dSPACE 獲得某個(gè)頻率下輸出y0(t)的一組采樣數(shù)據(jù)為y(kT),根據(jù)三角公式可知

式中:Bs、Bc分別為正弦、余弦分量系數(shù)。當(dāng)采樣頻率f0,測(cè)試頻率點(diǎn)ω0,采樣點(diǎn)數(shù)N 滿足等式ω0=時(shí),

因此系統(tǒng)輸出y0(t)的線性幅值和相位差為

系統(tǒng)傳遞函數(shù)在測(cè)試頻率點(diǎn)處的線性幅值B/A和相位φ 就可求得。
1.3 系統(tǒng)辨識(shí)的方法
圖1為dSPACE 平臺(tái)的系統(tǒng)辨識(shí)流程圖。
首先對(duì)控制對(duì)象的模型階次和轉(zhuǎn)折頻率進(jìn)行估計(jì),確定掃頻范圍,再利用dSPACE 平臺(tái)給測(cè)試對(duì)象一個(gè)設(shè)定好的掃頻信號(hào)源,并保存相關(guān)的掃頻數(shù)據(jù),根據(jù)最小二乘法處理保存的數(shù)據(jù),得到系統(tǒng)的頻率特性數(shù)據(jù)(線性幅值,相位和頻率),繪制出系統(tǒng)的線性幅頻和相頻曲線。

圖1 系統(tǒng)辨識(shí)流程圖Fig.1 Flowchart of system identification
將得到的系統(tǒng)頻率特性數(shù)據(jù)導(dǎo)入MATLAB 中的Ident 系統(tǒng)辨識(shí)工具箱[6-7],根據(jù)預(yù)估的系統(tǒng)階次辨識(shí)出最優(yōu)的數(shù)學(xué)模型,對(duì)該模型進(jìn)行轉(zhuǎn)化,最終導(dǎo)入Simulink,進(jìn)行分析。需要說明的是Ident 的輸入為所要辨識(shí)系統(tǒng)的線性幅值、相位和頻率,而控制系統(tǒng)通常概念上Bode 圖為對(duì)數(shù)幅頻曲線,其之間差20 倍的LOG 關(guān)系,本文在辨識(shí)過程中的幅頻曲線縱軸采用線性幅值,其單位為無量綱的增益,在控制器設(shè)計(jì)過程中的幅頻曲線縱軸采用對(duì)數(shù)幅值,其單位為dB.
2 仿真實(shí)驗(yàn)
為了驗(yàn)證本方法的正確性,在MATLAB 中對(duì)一個(gè)已知的二階系統(tǒng)進(jìn)行仿真實(shí)驗(yàn)。給定掃頻信號(hào)幅值為1,頻率變化范圍為1~100 Hz,采樣頻率為5 kHz.將仿真得到的大量數(shù)據(jù)導(dǎo)入最小二乘擬合算法,獲得該對(duì)象的頻率特性數(shù)據(jù),繪制出的線性頻率特性如圖2所示。

圖2 二階系統(tǒng)線性頻率特性Fig.2 Linear frequency characteristic of object
將頻率特性數(shù)據(jù)導(dǎo)入MATLAB 中的Ident 系統(tǒng)辨識(shí)工具箱,選擇線性參數(shù)模型后,給定階次為二階,辨識(shí)出的模型和已知的二階系統(tǒng)頻率特性對(duì)比如圖3所示。擬合度為95.2%,擬合精度較高,獲得的模型傳遞函數(shù)為

對(duì)比可知,辨識(shí)結(jié)果較為精確,該辨識(shí)方法可行。
3 某穩(wěn)瞄方位軸穩(wěn)定回路實(shí)驗(yàn)

圖3 二階系統(tǒng)與辨識(shí)輸出模型線性頻率特性對(duì)比Fig.3 Comparison of linear frequency characteristics of object and model
選定的辨識(shí)對(duì)象為某型穩(wěn)瞄系統(tǒng)速率穩(wěn)定回路,如圖4所示[8]。它由陀螺測(cè)量視軸相對(duì)慣性空間的速度,與速度命令形成誤差信號(hào),經(jīng)過穩(wěn)定回路控制器形成控制電壓,通過伺服驅(qū)動(dòng)器控制力矩電機(jī),力矩電機(jī)產(chǎn)生驅(qū)動(dòng)力矩,帶動(dòng)平臺(tái)反向轉(zhuǎn)動(dòng),消除誤差。

圖4 穩(wěn)瞄系統(tǒng)速率穩(wěn)定回路Fig.4 Stabilizing loop of system
3.1 對(duì)象模型階次和轉(zhuǎn)折頻率估計(jì)
對(duì)象模型階次和轉(zhuǎn)折頻率是采用系統(tǒng)辨識(shí)方法對(duì)控制對(duì)象建模的一個(gè)重要參數(shù)。為了便于預(yù)估環(huán)路參數(shù),辨識(shí)開始前,選擇穩(wěn)定回路控制器為比例控制,電流環(huán)帶寬通常大于1 kHz,遠(yuǎn)遠(yuǎn)大于穩(wěn)定回路轉(zhuǎn)折頻率,因而可以將其近似成一個(gè)比例環(huán)節(jié)[9]。從圖4可知,辨識(shí)數(shù)據(jù)來源于控制系統(tǒng)的給定,因此可以將閉環(huán)系統(tǒng)看做反饋通道為單位負(fù)反饋,前向通道依次為控制器和功放、電機(jī)、平臺(tái)以及陀螺的串聯(lián),因而從掃頻給定到速率反饋整個(gè)前向通道階次為一個(gè)四階系統(tǒng),綜合考慮到諧振、摩擦和線擾等因素影響,實(shí)際系統(tǒng)應(yīng)該是一個(gè)高階系統(tǒng),反饋通道為單位負(fù)反饋。
掃頻頻率區(qū)間應(yīng)覆蓋系統(tǒng)所有轉(zhuǎn)折頻率點(diǎn),并向高頻和低頻有所延伸,速率穩(wěn)定回路轉(zhuǎn)折頻率通常為30 Hz 左右,所以辨識(shí)掃頻信號(hào)的合理區(qū)間為0.5~200 Hz.
已知穩(wěn)瞄系統(tǒng)速率穩(wěn)定回路控制器Gk(s)為比例控制;驅(qū)動(dòng)器、電機(jī)、平臺(tái)和陀螺的串聯(lián)傳遞函數(shù)為Gp(s);整個(gè)速率穩(wěn)定回路閉環(huán)傳遞函數(shù)為Gs(s).
因此

3.2 根據(jù)頻率特性辨識(shí)系統(tǒng)模型
掃頻信號(hào)作為速率穩(wěn)定回路的給定,反饋信號(hào)為速率陀螺的信號(hào)。將給定信號(hào)、反饋信號(hào)和掃頻信號(hào)的頻率同時(shí)保存作為辨識(shí)的數(shù)據(jù)來源。頻率區(qū)間選擇0.5~200 Hz,采用與仿真實(shí)驗(yàn)同樣的擬合算法,獲得速率穩(wěn)定回路頻率特性如圖5所示。

圖5 穩(wěn)定回路線性頻率特性Fig.5 Linear frequency characteristic of stabilizing loop
輸入系統(tǒng)頻率特性數(shù)據(jù),取模型為六階系統(tǒng),辨識(shí)輸出模型頻率特性和系統(tǒng)頻率特性如圖6所示,低頻誤差小于5%.
辨識(shí)獲得速率穩(wěn)定回路閉環(huán)傳遞函數(shù)為

圖6 穩(wěn)定回路與辨識(shí)輸出模型線性頻率特性對(duì)比圖Fig.6 Comparison of linear frequency characteristics of stabilizing loop and model

采用(8)式,得前向通道傳遞函數(shù)

由以上分析可知,該傳遞函數(shù)是功放、電機(jī)、平臺(tái)、陀螺和擾動(dòng)等的串聯(lián)組合,可以作為穩(wěn)定回路的控制對(duì)象。
3.3 SISO 控制器設(shè)計(jì)
將(10)式導(dǎo)入SISO 控制系統(tǒng)設(shè)計(jì)工具箱,利用經(jīng)典控制理論中典型的串聯(lián)補(bǔ)償方法設(shè)計(jì)獲得的控制器為

(10)式包含3 個(gè)0 點(diǎn),其中2 個(gè)0 點(diǎn)重合,包含1 個(gè)極點(diǎn)和2 個(gè)積分環(huán)節(jié)。獲得期望特性的頻率曲線,如圖7所示。

圖7 SISO 工具箱開環(huán)Bode 圖Fig.7 Open loop Bode diagram of SISO toolbox
將所設(shè)計(jì)控制器加入該半實(shí)物仿真實(shí)驗(yàn)平臺(tái)運(yùn)行,實(shí)測(cè)該控制器用于真實(shí)系統(tǒng)后的Bode 圖如圖8所示,由圖7和圖8可知,仿真開環(huán)剪切頻率為31.5 Hz,實(shí)測(cè)為32 Hz,仿真相位裕度為50°,實(shí)測(cè)為53°,仿真結(jié)果和實(shí)測(cè)結(jié)果非常接近。
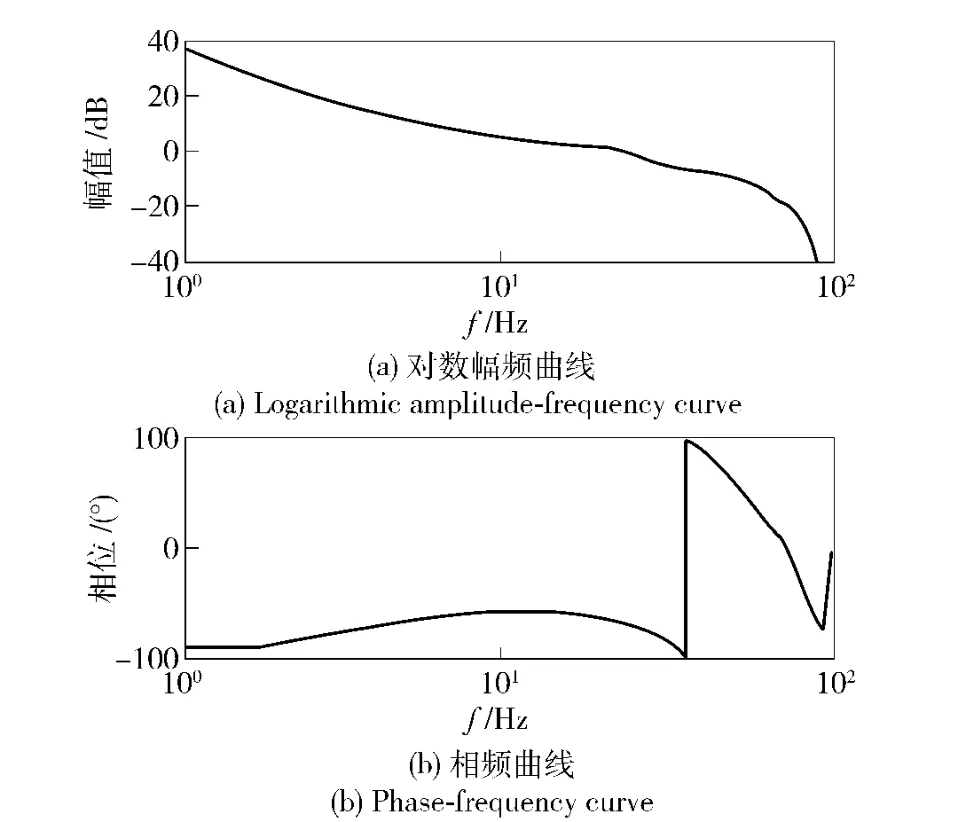
圖8 實(shí)測(cè)開環(huán)Bode 圖Fig.8 Bode diagram in actual test
4 結(jié)論
利用最小二乘法和系統(tǒng)辨識(shí)方法,在dSPACE半實(shí)物仿真平臺(tái)上實(shí)現(xiàn)了陀螺穩(wěn)定回路模型的建立,并基于該模型設(shè)計(jì)了控制器,仿真結(jié)果和半實(shí)物平臺(tái)實(shí)驗(yàn)結(jié)果非常接近,證明了這種方法的有效性和實(shí)用性。由辨識(shí)過程可知,辨識(shí)數(shù)據(jù)是在穩(wěn)瞄系統(tǒng)實(shí)際工況下掃頻獲得的,其中包含了摩擦和線擾等非線性因素,因而這種建模方法獲得的模型更接近實(shí)際。最終獲得的穩(wěn)定回路模型可以直接作為位置回路的控制對(duì)象,為位置隨動(dòng)控制器和瞄準(zhǔn)線跟蹤控制器的設(shè)計(jì)提供了依據(jù)。本方法實(shí)現(xiàn)了速率穩(wěn)定回路的數(shù)字控制,其控制器可以直接移植到嵌入式處理器進(jìn)行實(shí)時(shí)控制而無需調(diào)試,極大地提高了效率。本方法為數(shù)字化機(jī)載光電穩(wěn)瞄伺服控制系統(tǒng)分析和設(shè)計(jì)奠定了基礎(chǔ)。
References)
[1] 潘峰,薛定宇,徐心和.基于dSPACE 半實(shí)物仿真技術(shù)的伺服控制研究與應(yīng)用[J].系統(tǒng)仿真學(xué)報(bào),2004,16(5):936-939.PAN Feng,XUE Ding-yu,XU Xing-h(huán)e.The research and application of dSPACE based hardware-in-the-loop simulation technique in servo control[J].Journal of System Simulation,2004,16(5):936-939.(in Chinese)
[2] 李言俊.系統(tǒng)辨識(shí)理論及應(yīng)用[M].北京:國防工業(yè)出版社,2006.LI Yan-jun.Theory and application of system identification[M].Beijing:National Defense Industrial Press,2006.(in Chinese)
[3] 范世珣,范大鵬,張智永,等.機(jī)電裝置頻率特性的數(shù)字化測(cè)試方法研究[J].動(dòng)力學(xué)與控制學(xué)報(bào),2007,5(1):92-96.FAN Shi-xun,F(xiàn)AN Da-peng,ZHANG Zhi-yong,et al.The research on the digital measurement of frequency response characteristics of machatronics equipment[J].Journal of Dynamics and Control,2007,27(6):92-96.(in Chinese)
[4] 劉德朋,趙葉華.關(guān)于頻率特性的一種精確測(cè)量算法[J].電子測(cè)量與儀器學(xué)報(bào),2006,20(3):54-56.LIU De-peng,ZHAO Ye-h(huán)ua.A novel precision measuring algorithms of frequency characteristic[J].Journal of Electronic Measurement and Instrument,2006,20(3):54-56.(in Chinese)
[5] 張紹寧,陳鵬.非標(biāo)準(zhǔn)設(shè)備頻率特性的自動(dòng)化測(cè)試[J].戰(zhàn)術(shù)導(dǎo)彈技術(shù),2006,(6):76-79.ZHANG Shao-ning,CHENG Peng.Automation test for frequency characteristic of nonstandard facilities[J].Tactical Missile Technology November,2006,(6):76-79.(in Chinese)
[6] 薛定宇,陳陽泉.基于MATLAB/Simulink 的系統(tǒng)仿真技術(shù)與應(yīng)用[M].北京:清華大學(xué)出版社,2006.XUE Ding-yu,CHENG Yang-quan.system simulation technology and application based on MATLAB/Simulink[M].Beijing:Tsinghua University Press,2006.(in Chinese)
[7] Lennart Ljung.System Identification Toolbox 7 User’s Guide[EB/OL].[2008-10].http:∥www.mathworks.cn/help/ toolbox/ident/ug/ug_intropage.html.
[8] 張璟玥,紀(jì)明,王惠林.機(jī)載穩(wěn)瞄控制系統(tǒng)模型及仿真分析[J].應(yīng)用光學(xué),2006,27(6):491-496.ZHANG Jing-yue,JI Ming,WANG Hui-lin.Modeling and simulation of airborne stabilized sighting system[J].Journal of Applied Optics,2006,27(6):491-496.(in Chinese)
[9] 秦繼榮,沈安俊.現(xiàn)代直流伺服控制技術(shù)及其系統(tǒng)設(shè)計(jì)[M].北京:機(jī)械工業(yè)出版社,1999.QING Ji-rong,SHENG An-jun.DC servo control of modern technology and system design[M].Beijing:China Machinery Press,1999.(in Chinese)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
