車輛座椅三維減振平臺的運動學分析及參數優化
2011-01-29 08:47:08吳偉光馬履中
中國機械工程 2011年12期
吳偉光 馬履中
江蘇大學,鎮江,212013
車輛座椅三維減振平臺的運動學分析及參數優化
吳偉光 馬履中
江蘇大學,鎮江,212013
針對車輛座椅的三維減振問題,提出一種新型三平移并聯機構減振平臺,對減振平臺進行了運動學分析,利用MATLAB搜索機構的工作空間及其工作空間的奇異位形和操作靈活度,分析了機構結構參數與工作空間以及操作靈活度之間的關系,對該并聯減振平臺的結構參數進行了優化,且在MATLAB/Simulink中建立了該減振平臺的仿真模型。仿真結果表明:在隨機激勵下減振平臺具有較小的振動傳遞特性,適合作為車輛座椅三維減振平臺。
三維減振;工作空間;靈活度;優化;仿真
0 引言
車輛在行駛過程中由于路面不平引起上下顛簸,在制動時引起車體前后振動,在汽車拐彎轉向時引起車體左右振動,這些振動綜合起來可視為三維 x、y、z方向的振動。目前有關座椅的多維減振的方法還不多見,徐曉美等[1]研究了一種剪式座椅的振動特性,姚為民等[2]研究了空氣懸掛式座椅的減振特性,劉會英等[3]研究了人體—座椅系統的主動振動控制系統模型,但上述研究均只考慮了垂直方向車輛振動的影響。文獻[4]提出一種救護車用三維防振架,采用機械多層單自由度減振裝置,分層各自實現獨立方向的減振,結構十分復雜。由于并聯機構是一種多輸入和多輸出的多自由度系統,假設并聯機構平臺受到多維振動激勵,在并聯機構運動輸入的原動件處裝配可控的彈性阻尼減振系統,整個機構即可實現多方向的多自由度減振效果。基于并聯機構的運動特點,這種多維減振平臺具有結構緊湊、承載能力大、控制精度高、能夠滿足多種多維減振場合的需求,如陳修祥等[5]就提出采用多自由度的并聯機構實現車載設備的多維振動控制。近年來基于Stewart并聯機構的6自由度振動控制研究比較活躍[6-7],但針對少自由度的多維減振研究較少,對于車載座椅等少于六維的空間耦合振動,若采用上述裝置則顯得裝置復雜、成本高,且會導致多余的非期望振動出現,為此,必須研究按實際所需減振維數的多維減振裝置。
1 三維座椅減振平臺的結構
車載座椅的三維減振平臺采用一個3-PRRP(4R)并聯機構和彈性阻尼裝置組成,并聯機構由上下平臺和3個單開鏈組成,每個單開支鏈均由單自由度的移動副或轉動副組成,上平臺與座椅相連,它相對于下平臺可產生 x、y、z 3個方向的平移,在主動移動P副處安裝彈性阻尼減振器,這里采用空氣彈簧可調黏滯阻尼器,通過設計彈簧剛度可調整系統的固有頻率,通過可調阻尼器消耗車輛振動沖擊的能量來實現減振。考慮機構設計的對稱性,3個支鏈對稱布置,且結構參數相同。座椅三維減振平臺簡圖見圖1。
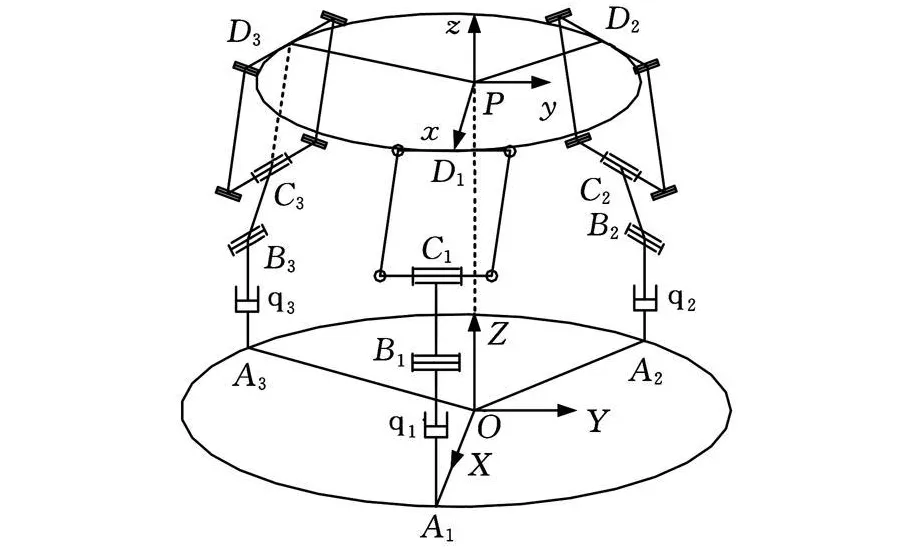
圖1 座椅三維減振平臺簡圖
2 三維座椅減振平臺的運動學分析
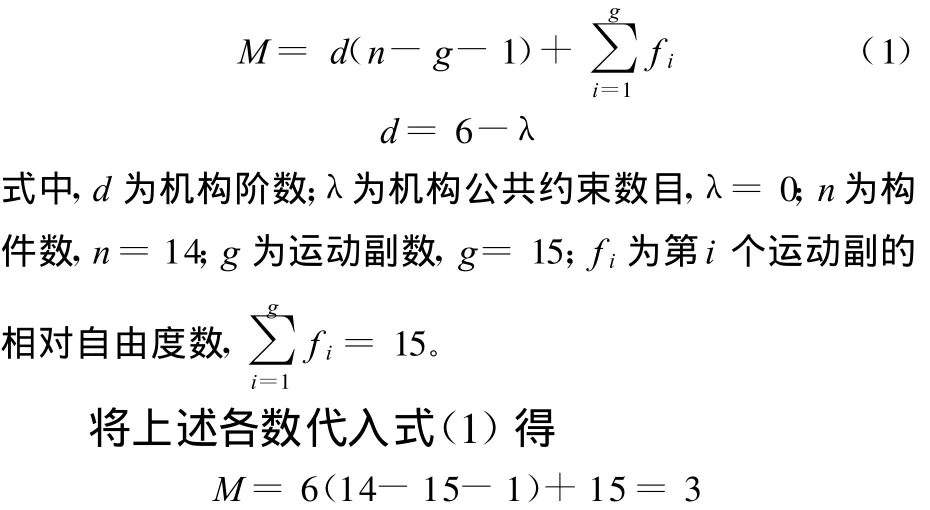
2.1 機構的自由度計算
該機構中,由于與動平臺相連的平行四桿機構存在虛約束,故計算自由度時應去掉平行四桿中與CiD i平行的一桿及其兩端的兩個轉動副(i=1,2,3),機構的自由度計算采用 Kutzbach G rub ler公式,即
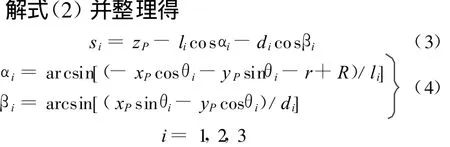
2.2 位置逆解分析
如圖1所示,在下平臺和上平臺的形心分別建立固定參考系OXYZ和動參考系P xyz,取機構的單開鏈進行分析,圖2所示為機構單支鏈投影圖,其中平行四桿采用虛擬桿CiDi代替[8-9],li、di分別為連桿 B iCi、CiD i的長度,αi、βi 分別為BiCi、CiD i與 z方向的夾角,si為桿AiBi上Bi點的位移 ,θi為OAi與 X 軸的夾角,θi=(0°,120°,-120°),r、R分別為動平臺、靜平臺的半徑。設r P、r D i分別為OP 、PD i在定坐標系OXYZ中的矢量,ai、e、li,di分 別 為 OAi、AiBi、BiCi、CiDi在OXYZ中的單位矢量,由圖2可得

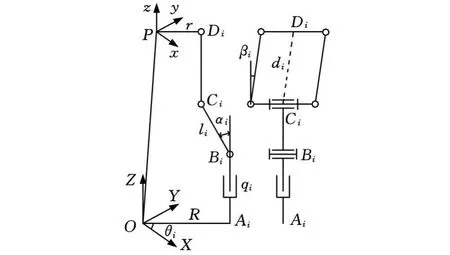
圖2 機構單開鏈坐標投影圖
2.3 機構的Jacob ian矩陣分析
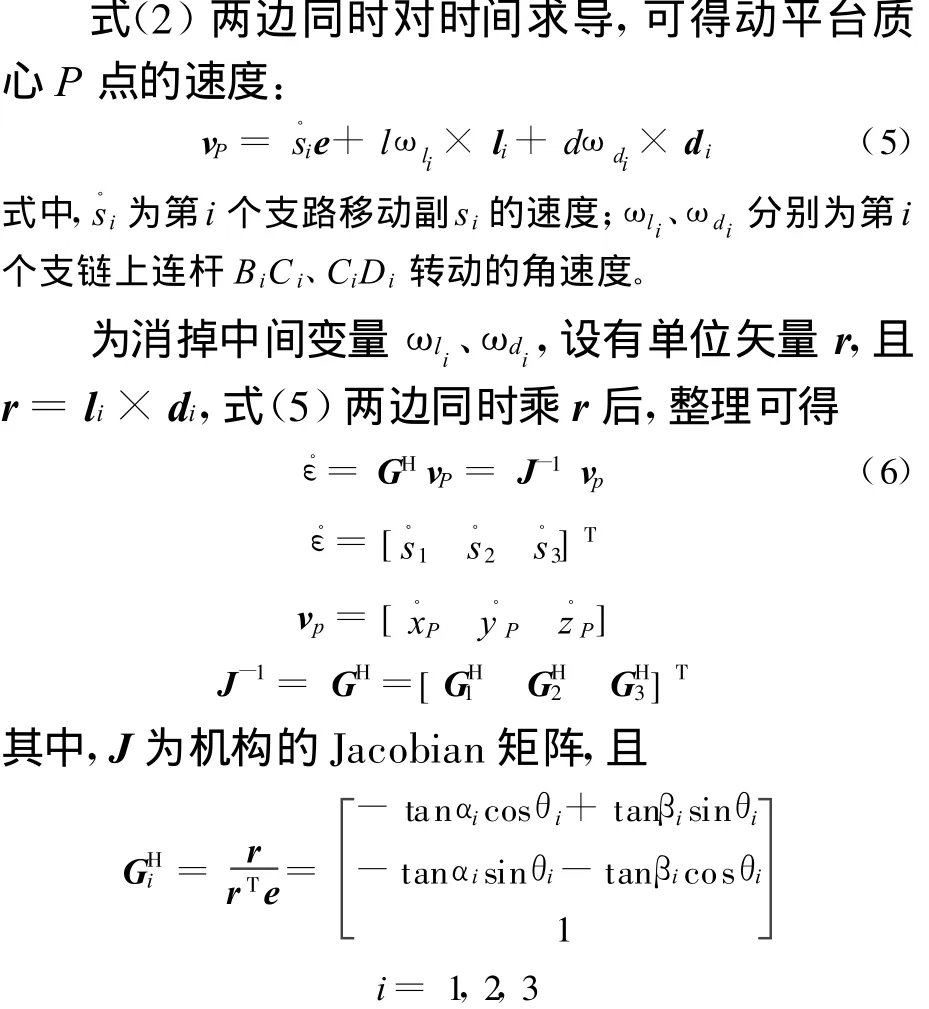
由Jacobian矩陣和虛功原理,可得力的Jacobian矩陣G=(JT)-1。從式(6)可知,該機構的Jacobian矩陣與機構動平臺的垂直位移zP無關,故座椅在垂直方向因載荷產生的位移不影響機構的Jacobian矩陣,這是該減振平臺的特點之一。
3 機構的工作空間分析
機器人的工作空間是指機器人操作器末端端點所能達到的空間點的集合,它是衡量機器人性能的重要指標之一。由于該并聯機構能夠實現三維平動,故動平臺相對靜平臺的姿態是固定的,所以該并聯機器人的可達工作空間和靈活工作空間是重合的。
并聯機構的工作空間分析依賴于機構位置逆解,通過位姿逆解可求出各關節變量,然后判定這些關節變量是否滿足約束條件,可搜索出機構的工作空間。該并聯機構的關節變量主要應滿足以下約束條件:
(1)驅動桿長的約束。驅動桿是機構的主動件,驅動桿的伸長范圍越大則機構的工作空間也越大,但是該減振平臺的驅動桿伸縮范圍有確定的極限值,根據主動副的行程及長度,這里每個驅動桿的位移取為120mm≤si≤180mm。
(2)轉動副轉角的約束。由于受機構運動和結構安裝的限制,同時也考慮到機構運動過程中連桿轉動角的影響,機構中轉動副應有一定的轉動范圍,本文連桿li、di兩端轉動副的轉角取為0≤αi≤π/3,-π/3 ≤βi≤π/3。
在MATLAB中通過坐標搜索,得到該并聯機構的工作空間,如圖3所示。由于移動副的行程與兩連桿li、di的長度接近,故其工作空間近似為一個錐形,若移動副的行程遠大于兩連桿的長度,則工作空間為一柱形,因此適合座椅空間三維的減振要求。
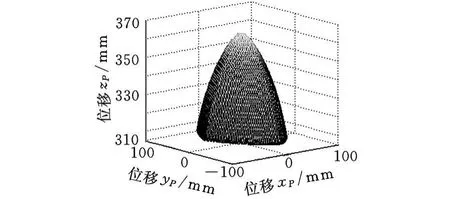
圖3 平臺的工作空間
4 機構的奇異位形分析
由于并聯機構在奇異位形位置時會使機構剛度喪失以及自由度發生變化、動力學性能惡化等,在設計和應用減振平臺時其工作位置應盡量避開奇異位形位置。有學者在研究了一般并聯機構的奇異位形問題后,根據Jacobian矩陣行列式方程的不同形式,提出了三種類型的奇異位形,即邊界奇異、構形奇異和位形奇異。
由于并聯機構的Jacobian矩陣是機構位姿的函數,Jacobian矩陣的奇異性分析是非常復雜的,這里通過MATLAB的工作空間搜索,直接尋求滿足det[J]=0的點,結果是在工作空間內沒有找到Jacobian矩陣奇異的點,表明該并聯機構在可達的工作空間中均不存在奇異點。
5 機構的靈巧度分析
由于減振需要,要求平臺機構在正向運動和反向運動中均不自鎖,具有較高的傳動效率,因此該減振平臺應具有較好的操作靈活性。并聯機構的靈活度是通過條件數、可操作度、最小奇異值等指標反映的,其中Jacobian矩陣J的條件數被認為是最適合評價操作性能的指標,并可定義為

其中,若J為非奇異陣,則σmax為J譜范數的最大奇異值,σmin為 J-1譜范數的最小奇異值。
從3-PRRP(4R)并聯機構的工作空間看,其形狀近似為一個錐形,這里取減振樣機平臺的工作平衡位置,即zP為320mm時分析機構的運動靈活度。通過坐標搜索,在機構的可達工作空間內計算其雅可比矩陣的條件數,其中Jacobian矩陣見式(6)。圖4所示為該條件數在工作截面上的分布,可以看出機構的條件數在4.5~8.5之間,其中在中間位置的機構條件數最小,即意味著機構在中心處的靈活度最好,越遠離中心則靈活度越差,而從總體上說該機構的運動靈活性還是較好的。
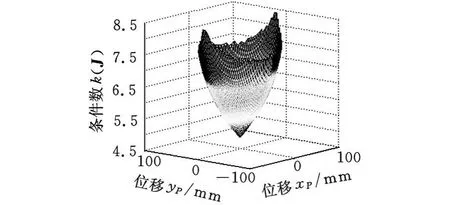
圖4 機構工作位置的條件數分布
6 減振平臺的尺度優化
通過前面的研究可知,并聯機構的工作空間比較復雜,且其隨著結構參數的變化而變化,通常只能通過空間搜索得到工作的邊界,考慮到該減振平臺一般主要工作在平衡位置,同時注意到垂直方向的位置改變并不改變該機構的Jacobian矩陣,因此,僅取機構樣機的工作位置 zP=320mm進行尺度優化分析。
首先分析機構上下平臺的結構參數對機構運動特性的影響。保持動平臺半徑r不變,改變下平臺的半徑R,計算機構在工作平面上條件數的平均值,通過在MATLAB中計算搜索,得到圖5所示的平均條件數隨下平臺半徑R的變化圖,從圖中可見,隨著靜平臺半徑R的增大,平均條件數逐漸減小,機構的操作靈活性增大,但同時機構的總體尺寸亦隨之增大。
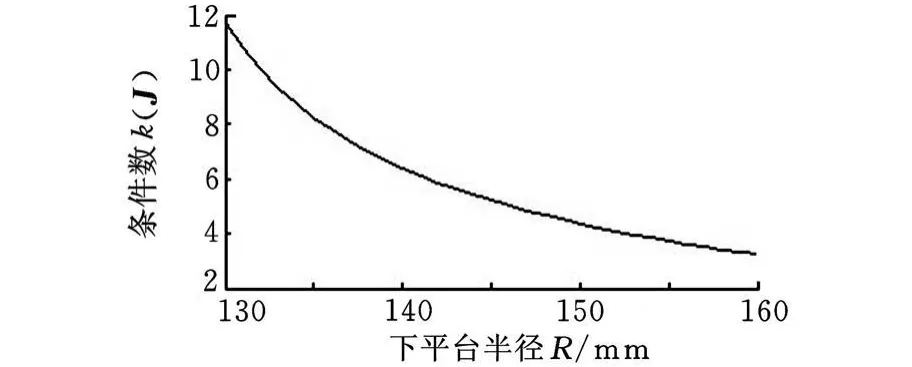
圖5 平均條件數隨下平臺半徑R的變化圖
其次分析連桿li、di尺寸對機構運動特性的影響。若保持機構上下平臺的參數不變,改變連桿li、di的尺寸,并分別計算在平臺工作平面的平均條件數,得到圖6所示的平均條件數隨桿長l、d的變化圖。從圖6可見,機構的操作性能隨連桿li、di尺寸的減小而增大,但在減小連桿 li、di尺寸的同時機構的工作空間亦隨之減小。
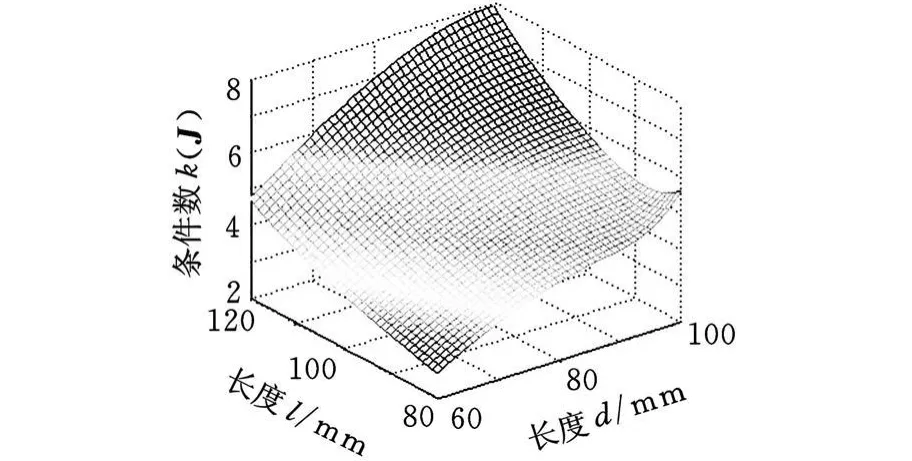
圖6 平均條件數隨桿長l、d的變化圖
設計中,我們希望機構的結構參數在能使平臺達到規定的工作空間要求的前提下,盡可能地使整個并聯機構具有更好的操作運動靈活性,同時具有較小的機構總體尺寸。因此以機構的結構參數為設計變量,取X=(R/r,l/r,d/r),其中設計變量參數取為量綱一形式,動平臺半徑r相對不變。取工作平面的平均條件數最小為目標函數,以一定的工作空間和結構尺寸(R、r)為約束條件,同時考慮到運動副的約束,通過在MATLAB中進行全局搜索,得到機構的最優尺寸。
在減振平臺的設計中,要求動平臺至少在x、y方向具有±15mm左右的位移空間,平臺上下行程在120~180mm之間,下平臺直徑不超過360mm,以方便車輛座椅的安裝。通過上述的全局優化搜索方法得到的機構結構設計參數為X=(1.25,0.67,0.5),此時機構的平均條件數為2.6802,工作空間在工作平面的投影如圖7所示,基本滿足減振平臺的設計要求。
7 減振平臺的振動分析
在實際的問題應用中,對車輛座椅來說主要關心其減振性能,特別是由于路面不平度引起的車輛隨機激勵下的振動特性。以圖1所示的減振平臺的動平臺為研究對象,不計各桿件質量,取
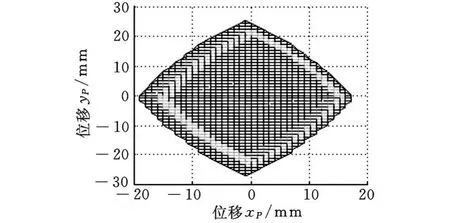
圖7 優化后的工作空間投影圖
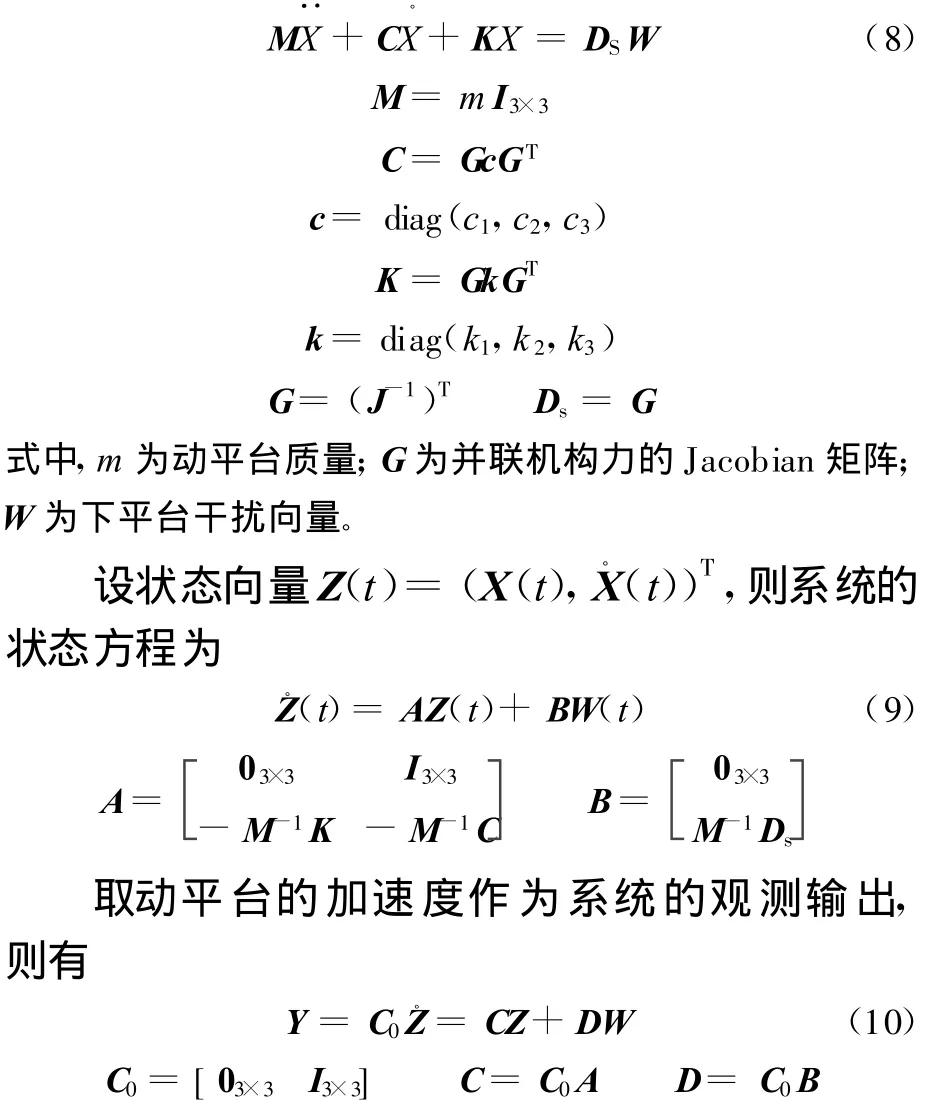
這里主要考慮在系統的靜力平衡位置,此時動平臺在承載后產生垂直方向的位移,但不影響機構的Jacobian矩陣。取系統參數 m=60kg,k1=k2=k3=100N/mm,阻尼比 ζ=0.2,根據式(9)、式(10),在MA TLAB中建立多維隨機激勵下振動響應的Simu link仿真模型,如圖8所示,其中增益K用來設置3個方向的激勵,并同時施加3個方向的隨機激勵,如圖9所示。在示波器中可求得動平臺加速度響應,圖10所示為橫向x、y方向的加速度響應。圖11所示為垂直z方向的響應,經過運動變換還可求得主動副qi的輸出,最后在MATLAB中求得系統在隨機激勵下的動平臺3個方向的振動頻率響應函數,如圖12所示,圖中η=W/a。由圖12可見,系統同時具有3個方向的良好減振效果。
8 結論
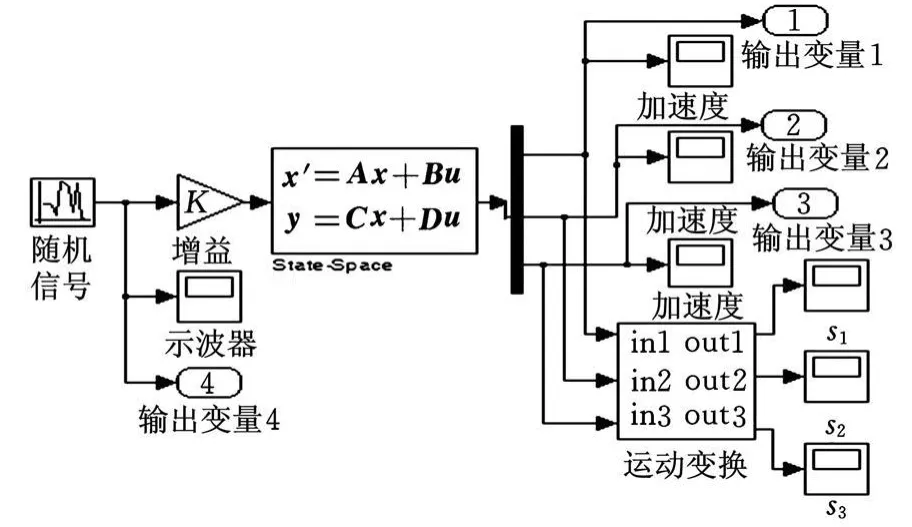
圖8 多維減振平臺隨機激勵下的仿真模型
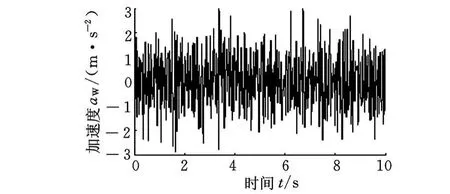
圖9 隨機激勵信號
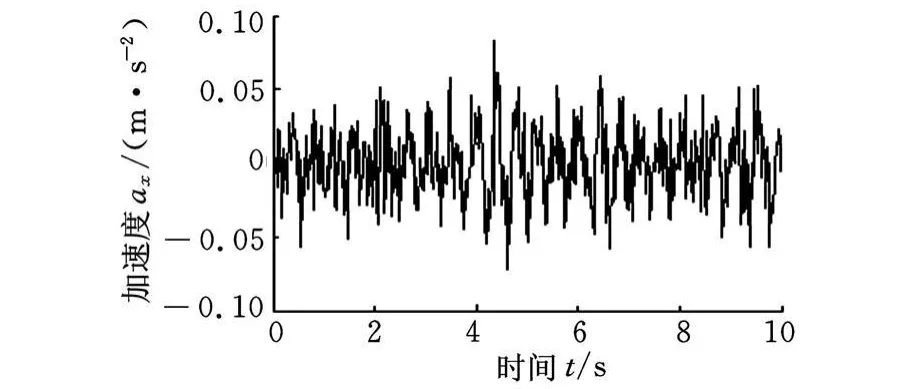
圖10 動平臺橫向加速度響應
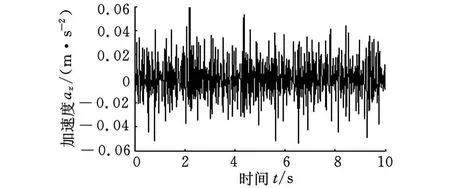
圖11 動平臺垂直加速度響應
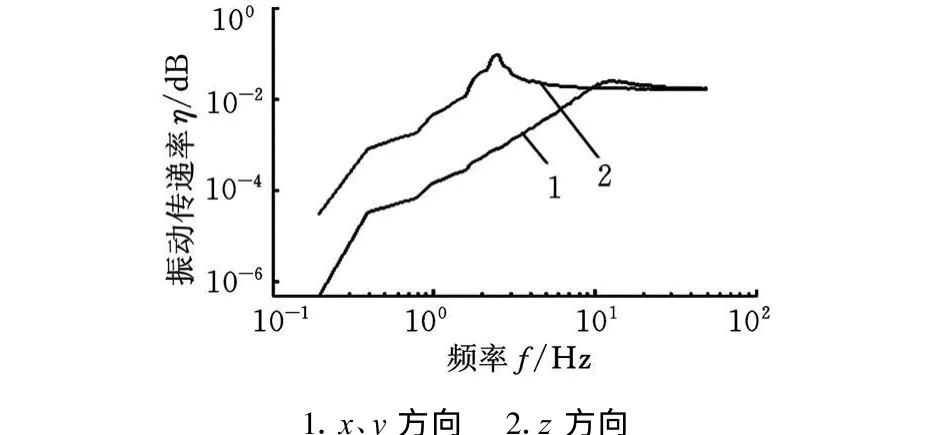
圖12 減振平臺頻率響應特性
(1)提出采用一種并聯機構作為車輛座椅的三維減振平臺,運動學分析表明該三維減振平臺可實現空間三平移運動,從而滿足座椅的三維減振要求,另外,三維減振平臺的Jacobian矩陣與機構的垂直位移無關。
(2)該減振平臺的工作空間均為靈活工作空間,可以滿足座椅空間三維的使用要求,并且在可達的工作空間內無奇異位形。
(3)該減振平臺的操作靈活性隨結構參數和工作位姿而改變,隨著下平臺半徑的增大以及連桿長度的減小,機構的操作靈活度變好,但同時機構的工作空間變小,故在使機構的結構參數滿足動平臺達到規定的工作空間要求的前提下,盡可能地使整個并聯機構具有更好的操作運動靈活性,同時盡量減小機構的總體尺寸。
(4)為了分析減振平臺的減振性能,以動平臺的位移、速度為狀態變量,加速度為觀測輸出,建立了多維減振系統的狀態方程,并在MATLAB中建立了隨機激勵下的系統振動仿真模型,仿真結果表明該平臺具有良好的三維減振效果。
[1] 徐曉美,朱思洪.一種剪式座椅振動特性的理論分析[J].中國機械工程,2006,17(4):802-804.
[2] 姚為民,孫丹丹,林逸.臥姿人體垂直振動模型的研究[J].汽車技術,2002(6):10-12.
[3] 劉會英,蓋玉先,鄭超.汽車座椅主動振動控制與仿真分析[J].中國機械工程,2006,17(12):1227-1230.
[4] 藤田悅則.救護車用防振架:中國,CN 1251292A[P].200-04-06.
[5] 陳修祥,馬履中.車載設備多維振動控制裝置的設計及模態研究[J].自然科學進展,2007,17(4):551-555.
[6] Preumont A,Horodinca M,Romanescu I.A Six Axis Sing le-stage Active V ibration Isolator Based on Stewart Platform[J].Journa l of Sound and V ibration,2007,300(3/5):644-661.
[7] Yang Tao,Ma Jia,Hou Zengguang,et al.Robust Backstepping Control of A ctive Vibration Iso lation Using a Stew art Platform[C]//IEEE International Conference on Robotics and Automation.Kobe,Japan,2009:1788-1793.
[8] 吳光中,李劍峰,費仁元,等.3-PU*U*型平動并聯機構的運動學分析[J].中國機械工程,2004,15(9):816-819.
[9] 朱偉,馬履中,吳偉光,等.新型3-PUU并聯機構的運動學和動力學分析及建模仿真[J].機床與液壓,2007(9):17-19.
Kinem atics Analysis and Optim ization of 3D V ibration Damping Platform of Vehicle Seat
Wu Weiguang Ma Lǜzhong
Jiangsu University,Zhenjiang,Jiangsu,212013
A new three-translation parallel mechanism was designed to resolve the problem of three-dimension vibration in vehicle seat.The kinematics of the platform was analyzed and the workspace and singularitieswas researched by softw are of MATLAB.Then the dexterity in workspace was analyzed and the relations betw een geometrical parameter,workspace and dex terity were studied.Finally the parametersof platform wereoptimized.Foranalyzing the vibration dam ping performance of the p latform,a simulation model w as built in MATLAB/Simulink,and the results indicate that the parallel p latform is suitable for three-dimension vibration isolation in vehicle seat.
three-dim vibration damping;workspace;dexterity;optim ization;simulation
TH 112
1004—132X(2011)12—1503—05
2010—08—13
國家自然科學基金資助項目(50905077);江蘇省博士后科研基金資助項目(0901010B)
(編輯 何成根)
吳偉光,男,1969年生。江蘇大學機械工程學院講師、博士研究生。研究方向為機械系統動力學及其控制。發表論文15篇。馬履中,男,1939年生。江蘇大學機械工程學院教授、博士研究生導師。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
電子制作(2018年18期)2018-11-14 01:48:24
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
山東工業技術(2016年15期)2016-12-01 05:31:22
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
計算物理(2014年2期)2014-03-11 17:01:44
