基于多Agent技術的復雜結構件自動裝配系統
2011-01-29 08:48:40苗新剛懷其武
中國機械工程 2011年12期
苗新剛 汪 蘇 懷其武 郭 倩
北京航空航天大學,北京,100191
基于多Agent技術的復雜結構件自動裝配系統
苗新剛 汪 蘇 懷其武 郭 倩
北京航空航天大學,北京,100191
復雜結構件自動裝配系統是集自動裝配、精確定位、誤差檢測、過程仿真、數據存儲等于一體的系統,由柔性裝配工裝、工業機器人、激光跟蹤儀、激光掃描儀等單元組成,而各單元之間的合作與協調是該系統的關鍵技術。通過分析裝配過程發現,多A gent技術非常適合該裝配過程的特點,因此,對復雜結構件自動裝配系統進行了多Agent建模,將系統分成若干個相互獨立的Agent,各Agent間通過局域網進行通信,通過改進的合同網協議進行協商,從而可以可靠地、有效地完成自動裝配任務。
飛機裝配;多A gent;激光跟蹤儀;激光掃描儀;機器人
0 引言
研究發現,復雜結構件自動裝配系統由若干個相對獨立的子系統組成,是典型的分布式系統,將多Agent的控制思想應用到該裝配系統中,是解決各子系統間通信、協調和合作的最有效途徑。
1 復雜結構件自動裝配系統總體方案
1.1 裝配過程簡介
在復雜結構件自動裝配系統工作時,由柔性裝配工裝來支撐和夾持飛機部件。在飛機部件的定位基準點上安裝光學目標反射器,由激光跟蹤儀測量這些光學目標點的位置,以獲得位置信息。該信息與飛機部件模型信息比對后,將數據傳遞給裝配系統的運動控制器,從而驅動柔性裝配工裝來調整飛機部件的位姿,直到定位基準點到達公差范圍內的準確目標位置上,實現部件的精確對接定位。同時,輔助機器人夾持著激光掃描儀對裝配部件進行掃描,獲得飛機部件的形面數據,然后傳遞給數據分析與處理系統,實現對整個裝配過程的實時在線仿真。
1.2 系統的總體方案
如上所述,復雜結構件自動裝配實驗系統是一個集自動裝配、精確定位、適時檢測、批量數據處理、裝配過程仿真等一體的綜合系統,涉及機械、控制、測量、計算機等方面的專業知識,系統的硬件結構如圖1所示。
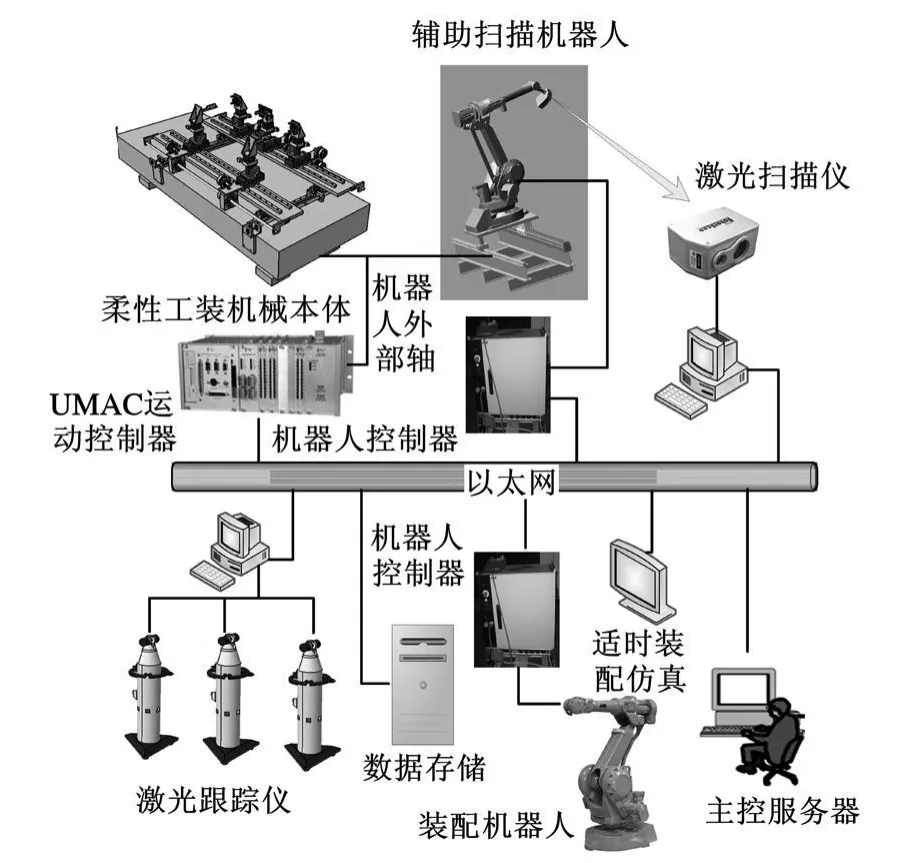
圖1 飛機裝配檢測一體化實驗系統硬件結構
(1)柔性裝配工裝子系統。主要由柔性工裝機械本體、多姿態柔性裝配型架、UMAC運動控制器等部分組成。柔性裝配工裝子系統是整個裝配系統的主體,它接受產品數據集數據,并根據其內部的控制算法來驅動機械本體,從而實現裝配定位的具體動作。
(2)數據采集與定位子系統。在裝配的過程中,裝配部件位置測量的準確性直接影響裝配的成敗,而激光跟蹤測量系統是解決這一難題的最好手段。激光跟蹤儀是近十幾年才發展起來的新型測量儀,它可對空間運動目標進行跟蹤并實時測量其空間三維坐標,具有安裝快捷、操作簡便、實時掃描測量、測量精度及效率高等優點。
(3)裝配適時檢測與仿真子系統。采用三維激光掃描儀,可快速準確地對工件原型進行三維掃描和高精度數字化復制,從而建立工件的數學模型,產生出裝配全過程的三維動態仿真,并顯示裝配工裝系統的生成時間、飛機部件的裝配時間以及裝配操作性、安全性的檢查評估報告。該系統由輔助機器人末端夾持激光掃描儀來實現。
(4)裝配機器人子系統。當定位完成后,由裝配機器人按照裝配工藝的要求,對零部件進行裝配連接。
(5)數據管理子系統。基于Orical數據庫,利用多線程技術并行實現數據采集、數據存儲與在線監控,將產品數據集、裝配工作數據、測量數據、檢測數據等關鍵數據進行實時保存,并提供一個友好的用戶界面。
2.1 文獻檢索結果 初檢獲得相關文獻498篇,閱讀題目和摘要后納入74篇文獻,然后按納入與排除標準,最終納入10篇文獻[4-13],共541例。文獻篩選流程,見圖1。
2 復雜結構件自動裝配系統的多Agent建模
2.1 系統的多Agent建模
通過對系統的特征分析我們可以發現,系統中包含有功能不同、相互獨立的資源,采用傳統的集中式控制存在一定的困難。而多Agent[4-11]思想符合飛機自動裝配系統分布式控制的特點,并且該系統中的獨立資源,如柔性裝配子系統、激光掃描儀、激光跟蹤儀、裝配機器人等,它們都是Agent的最佳代表。因此,本文選擇多Agent的思想作為系統的控制模型,從而建立系統的多Agent結構,如圖2所示。
系統中各 Agent的功能如下:系統管理Agent負責整個系統的管理工作,用戶Agent通過系統管理Agent提供的界面與裝配過程進行交互;柔性裝配工裝Agent負責系統的裝配任務,包括基本的機械構件及控制模塊,是整個裝配系統的主體;數據采集與定位Agent負責系統的精確定位,一般由三臺激光跟蹤儀組成,可對空間的定位點提供精確地三維坐標;定位完成后,由裝配機器人Agent進行裝配連接;適時檢測Agent由工業輔助機器人手持激光掃描儀組成,主要完成裝配零部件的關鍵部分輪廓掃描,得到該特征的三維實體模型;裝配過程仿真Agent一方面要根據裝配零部件生成相關的裝配工藝,另一方面還要根據反饋的信息對裝配過程進行適時仿真,從而監控整個裝配過程;數據庫Agent將裝配過程中生成的大量數據進行保存。所有的Agent通過以太網進行通信,并采用改進的合同網協議進行協商,從而共同完成整個裝配任務。
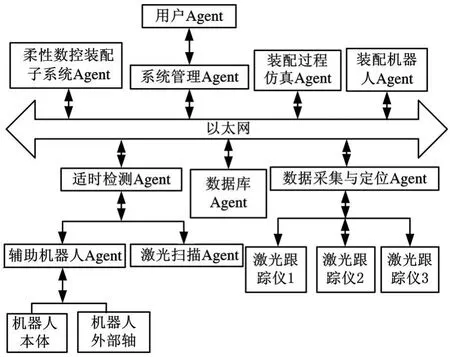
圖2 飛機自動裝配系統的多Agent模型
2.2 Agent內部結構建模
Agent的體系結構一般包括以下三種[12-13]:慎思型結構、反應型結構、混合型結構。其中,混合型結構是慎思型結構和反應型結構的結合,既能實現面向目標的長期規劃,又具有實時性的特點,是多Agent應用中最常用的體系結構。
在考慮Agent基本結構和實際裝配生產過程的基礎上,本文提出了如圖3所示的混合式Agent模型。
各模塊功能如下:
(1)總控模塊 初始化內部知識庫,調入領域專家定義的協作描述,應用交互協議與其他專家Agent交互,控制任務隊列中任務的提交和委托等。它是各個Agent內部的控制機構。
(2)反應模塊 使得Agent具備了反應性;繼承了反應型Agent的優點。
(3)通信模塊 與其他 Agnet的接口,使Agent不再是孤立的,具備和其他Agent的交互能力,從而使Agent具有了社會性。本系統通信協議采用改進的合同網協議,通信語言采用KQM L語言。
(4)局部任務規劃模塊和協作模塊 使Agent根據自己的目標、能力及狀態做出決定,而不受其他系統干涉,保證了Agent具有自主性和能動性。
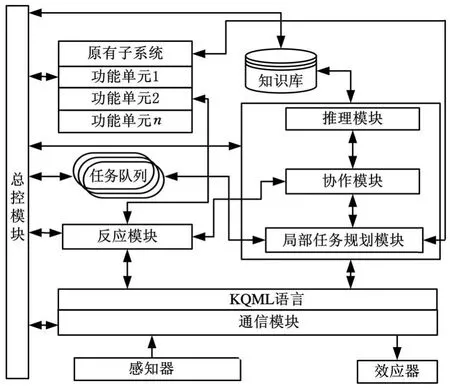
圖 3 Agent內部結構
(5)任務模塊和任務隊列 系統中的問題求解和協作均以任務為單位進行,任務處理模塊對本地用戶提交的問題進行分析,將超出自身知識領域的部分問題分解成一個或多個子任務并放入任務隊列,將其轉化成推理模塊可以識別的信息格式以進行推理。
(6)推理模塊 是專家Agent的執行機構,由任務處理模塊啟動,推理機體現了知識運用的方法。
(7)知識庫 記錄本地專家Agent和協作問題求解過程中的中間信息。存放專家Agent間協作的策略、知識、方法,以及采用的交互協議。
從系統的開發方式來看,該模型既具有反應層的特性又復合慎思層的要求,以適應系統對反應速度和智能水平的不同要求。有了這樣的混合型Agent內核,可以實現更多原有系統的重用,同時原有子系統的重用也為新系統的開發提高了效率、節約了成本。
3 裝配實例
圖4為用多Agent系統進行裝配定位的一個實例。裝配要求為:某機翼的翼梁模型由三段連接而成,3個三坐標的柔性工裝上分別夾持其中一段進行對接,由激光跟蹤儀進行定位測量。為了對比效果,分兩次進行對接,一次是基于傳統的集中式控制方法,另一次是基于多Agent方法。
對接完成后再次使用激光跟蹤儀對其設計軸線的同軸度進行測量,測量方法是在每段翼梁上分別取一個測量點A、B、C,分別測其空間 X、Y、Z的坐標,每個點測量三次,測量結果如表1和表2所示。

圖4 裝配實例圖
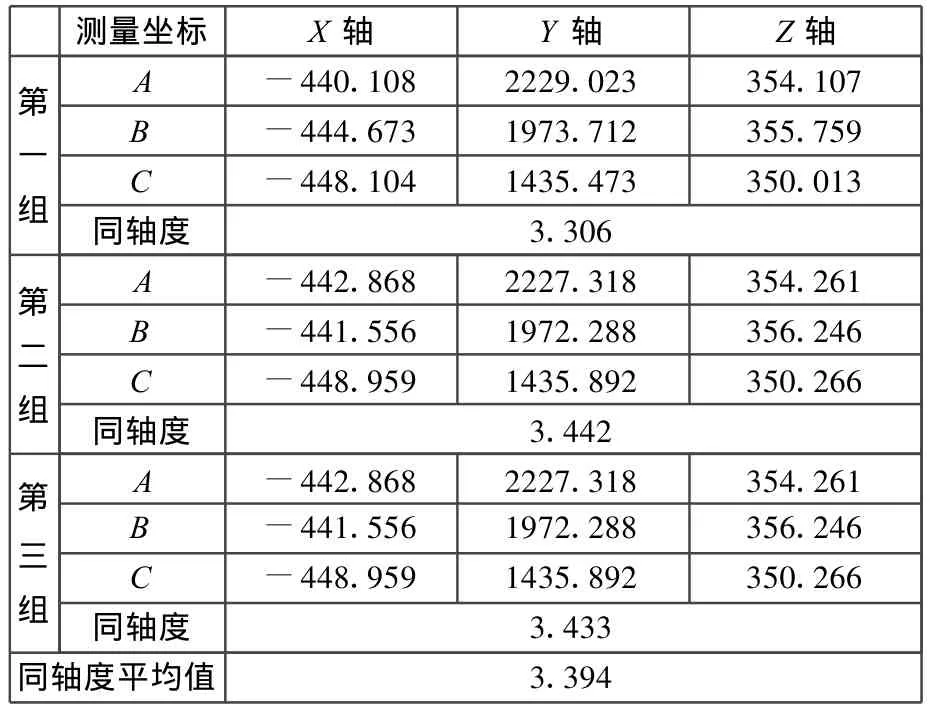
表1 集中式控制方法測量的同軸度
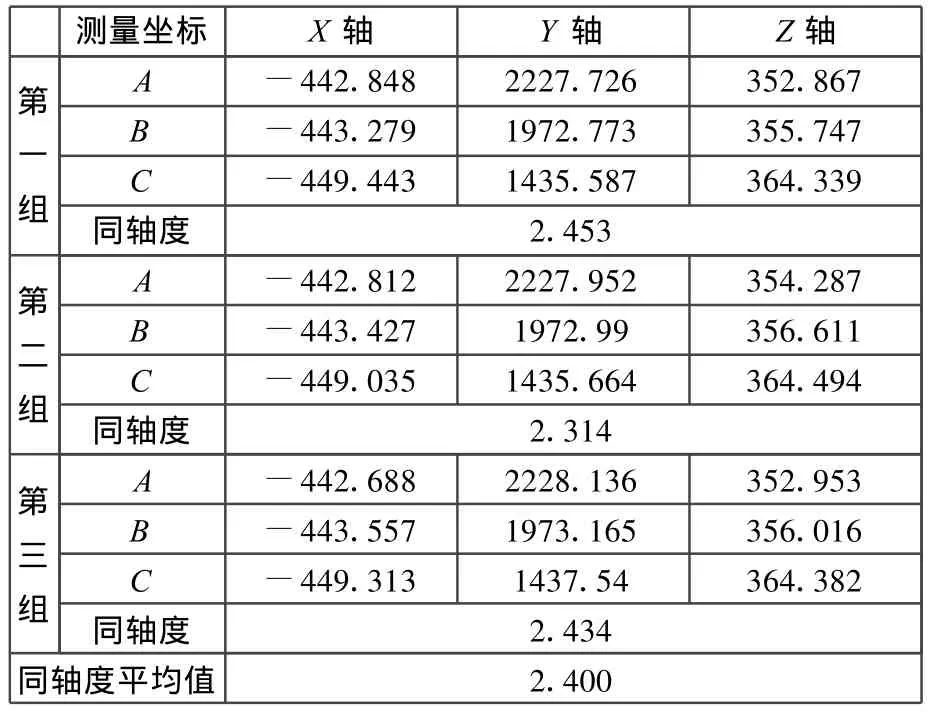
表2 基于Agent方法測量的同軸度
從表中可以看出,與傳統的集中式控制相比,運用基于多Agent的控制方法裝配的定位精度(同軸度)大約提高了30%。另外,由于多Agent系統在控制方式和數據傳遞上都比集中式控制減少了中間環節,所以,其裝配效率有很大提高。
4 結束語
本文首先設計了復雜結構件裝配檢測一體化系統的總體方案,該方案是一個集自動裝配、適時檢測、精確定位、批量數據處理、裝配過程仿真等一體的綜合系統。其次,提出了基于多Agent技術的控制思想,對系統進行了多Agent建模,將整個系統劃分為系統管理Agent、柔性裝配工裝Agent、數據采集與定位Agent等獨立的Agent,并根據裝配過程的實際情況設計了單Agent的內部結構,從而為復雜結構件自動裝配系統的各子系統設計提供了理論基礎。裝配實驗表明,基于多Agent技術的控制方法,其定位精度和裝配效率都得到很大的提高。
[1] 許國康.大型飛機自動化裝配技術[J].航空學報,2008,29(3):734-740.
[2] 陳先有,黃俊波.直升機數字化裝配技術分析[J].新技術新工藝,2007(7):57-60.
[3] 范玉青.飛機數字化裝配技術綜述——飛機制造的一次革命性變革[J].航空制造技術,2006(10):44-48.
[4] 王天然,朱楓,黃閃.智能機器人體系結構的研究與設計[J].機器人,1995,17(4):193-199.
[5] Wooldridge M,Jennings N R.Intelligent Agents:Theory and Practice[J].The Know ledge Engineering Review,1995,10(2):115-152.
[6] 聶亞杰,劉大昕,馬惠玲.Agent的體系結構[J].計算機應用研究,2001(9):52-55.
[7] 蔡自興,徐光祐.人工智能及其應用[M].3版.北京:清華大學出版社,2003.
[8] 武海鷹,王緒安.分布式人工智能與多智能體系統研究[J].微機發展.2004,14(3):80-82.
[9] 張連新.基于多智能體技術的機器人遙控焊接系統研究[D].哈爾濱:哈爾濱工業大學,2007.
[10] Nw ana H S.Softw are Agents:An Overview[J].The Know edge Engineering Review,1996,11(3):205-244.
[11] Jenning N R,Sycara K P,Woold ridge M.A Roadmap o f Agent Research and Deve lopment[J].Autonomous Agents and Multi-Agent System s.1998,1(1):7-38.
[12] 李海剛 ,吳啟迪.多 Agent系統研究綜述[J].同濟大學學報,2003,31(6):728-732.
[13] Woold ridge M,Jennings N R.Agent Theories,A rchitectures,and Languages:A Survey in Agents[J].Lec ture Notes in Computer Intelligence,1995,890:1-39.
Comp lex-structure Automatic Assembly System Based on Multi-agent
M iao Xingang Wang Su HuaiQiwu Guo Qian
Beijing University of Aeronautics and Astronautics,Beijing,100191
Comp lex-structure assemb ly detection integrated system included autom atic assemb ly,precision orientation,error checking,process simulation and data storage.Itwasmade up by flexible numerical control assem bly p latform,industrial robot,laser tracker and laser scanner.The cooperation of all parts is the key techno logy.It can be seen from analyses that the technology of multi-agent is very suitable for theassembly,so themulti-agentmodel ismade.Thewhole system can be divided into several separate agents,they can communicate by local area network,and they can negotiation by contract net protocol,so they can accom plish the assembly task reliably and effectively.
aircraft assembly;multi-agent;laser tracker;laser scanner;robot
TP273
1004—132X(2011)12—1440—04
2010—07—23
北京市教育委員會共建項目專項資助(20091024)
(編輯 何成根)
苗新剛,男,1973年生。北京航空航天大學機械工程及自動化學院博士研究生。研究方向為焊接機器人設計及控制系統、飛機自動裝配系統。發表論文10余篇。汪 蘇,男,1959年生。北京航空航天大學機械工程及自動化學院教授、博士研究生導師。懷其武,男,1985年生。北京航空航天大學機械工程及自動化學院碩士研究生。郭 倩,女,1987年生。北京航空航天大學機械工程及自動化學院碩士研究生。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
