小型室內水槽造波造風系統設計
2011-01-10 01:41:26王巖峰黃振興高軍偉
海洋技術學報 2011年4期
官 晟,王巖峰 ,黃振興 ,高軍偉
(1.國家海洋局第一海洋研究所,山東 青島 266071;2.青島大學自動化工程學院,山東 青島 266071)
小型室內水槽造波造風系統設計
官 晟1,王巖峰1,黃振興2,高軍偉2
(1.國家海洋局第一海洋研究所,山東 青島 266071;2.青島大學自動化工程學院,山東 青島 266071)
小型室內風浪水槽是海氣界面多種微尺度過程實驗研究的基礎設施。造風造波系統是風浪水槽的核心部分。針對多種微尺度過程模擬的需要,設計了造風造波系統的硬件結構與控制軟件。利用該系統,開展了多種造波、造風實驗。通過對實驗數據的分析,證明該設計滿足各項預定指標,可以有效模擬多種海氣界面風浪環境。
風浪水槽;搖板式造波機;labVIEW ;伺服系統;運動控制器
海氣相互作用對天氣和氣候的影響深遠,已成為大氣科學和海洋科學中重要的課題。但海氣相互作用中許多微尺度過程具有典型的間歇性湍流運動特征,觀測難度較大。因此利用室內風浪水槽對多種微尺度過程進行模擬,在此基礎上開展實驗室觀測是海氣相互作用研究中的一個重要方法。
為模擬包括微尺度波浪的形成及破碎過程;界面的能量傳輸;海水表層的物質輸運過程;界面和水體內部的湍流混合過程等微尺度過程,室內風浪水槽需要具備可預置參數、可編程的自動造風、造波功能,實時提供水槽風浪參數,并且能為海面微結構光學測量裝置、微尺度動力過程光學測量裝置(PIV和LIF)、紅外熱像系統、聲學多普勒流速儀(ADV)等試驗設備,提供多種可組裝的、可精密調節的光學及電子設備平臺及窗口。其中,造風造波系統無疑是小型室內風浪水槽的核心組成部分,也是此類系統的研究重點。
1 造風造波系統技術背景與參數設計
作為一種重要的研究平臺,國內外很多海洋、水利、水下工程的研究機構修建了多種應用于仿真實驗研究的室內風浪水槽。
1932年,美國海灘侵蝕管委會就建筑了世界第一臺規則波造波水槽。1957年,荷蘭的瓦格寧根造波水池正式交付使用,該造波水池是世界上最早的一個耐波性水池,水池長寬深分別為100 m、24.5 m和2.5 m,該造波機的造波結構為搖板式蛇形結構,能夠產生的波浪波長范圍是1.5~6 m。1958年,美國的泰勒矩形水池建造完成,水池主體長寬深分別為110 m、73 m和6 m,該造波機的造波結構為氣動式造波結構,能夠產生的波浪波長范圍為0.92~12.2 m,波浪的波高范圍為0.01~0.06 m,該造波機也可造短峰波及長峰不規則波。1962年,英國的哈斯拉水池也建造完成并投入使用,該造波機的造波結構為沖箱式造波機,能夠模擬長峰規則波和不規則波。德國漢堡大學風浪水槽長26 m、寬1 m,平均水深0.5 m。造風速度范圍1.5~25 m/s,推板式機械造波頻率范圍0.7~2.5 Hz,水槽遠端設有消波裝置[1]。法國馬賽無線電與電子研究所大型風浪水槽長40 m,寬2.6 m,平均水深1 m。設有長40 m,寬3.2 m,深1.6 m的封閉風道,風速最高可達14 m/s,電腦控制機械造波頻率范圍0.5~2 Hz。
我國對于水池造波設備及其理論方面的研究起步比較晚。20世紀80年代初,南京水利科學研究院成功的研制出國內第一臺不規則波造波機[2]。1986年,大連理工大學研制的低慣性伺服電機驅動式水槽造波機投入運行。該海洋環境水槽長50 m,寬3 m,深1 m,最大工作水深0.7 m。由造波板、液壓伺服動作器、液壓泵站、伺服放大器、A/D與D/A接口及計算機等硬件部分和控制分析軟件組成。該水槽選用推板式造波方案,由液壓伺服系統提供運動能量。可以造規則波和不規則波[3]。中國海洋大學大型風-浪-流水槽通過風機、造波機、流機,在封閉的管道中形成人工的風、浪、流,構建一個模擬海面實際情況的背景環境,進行多種模擬實驗。水槽長65 m,寬1.2 m,高1.5 m;最大水深1 m[4]。可造風速范圍 1.5~14 m/s;流速范圍 0~0.4 m/s;隨機機械造波機可造0.4 m內的規則波或給定譜形的隨機波。另有二維內波水槽和三維內波水槽,均配備有鉭絲波面測量裝置;聲學多普勒測速儀(ADV);粒子成像測速儀(PIV);風速測量裝置(熱線風速儀、皮托管、風杯)等。浙江省水利河口研究院波流風水槽由波流水槽、造波機系統、流場模擬系統及風模擬系統組成。水槽長70 m,寬為1.2 m,高為1.7 m,主要開展河流泥沙輸運模擬研究[5]。
隨著國內大型風浪水槽的建設,相關技術也在不斷進步。但目前這些大型水槽使用成本都較高。國內目前還沒有能實現規則波模擬、簡單的不規則波模擬以及風浪的模擬,專門與海氣界面微尺度過程觀測相配套的小型風浪水槽。
作為風浪水槽功能實現的核心部分,造風、造波系統涉及到海洋物理學、造波理論、自動控制、運動控制技術、計算機應用技術、電力電子技術、傳感技術等多種學科。制約造波技術發展的一個重要因素就是造波系統執行機構運動的隨機控制和造波波浪的數據采集和處理。隨著計算機應用技術、自動控制理論和伺服運動控制技術的發展,高性能控制器能夠對造波板的運動控制更加靈活、準確[6];控制信號的數字化,可對運動機構進行調幅、調頻,從而簡化了規則波和不規則波的產生。目前,造波方式仍以機械式造波為主,即通過造波部件的機械運動對水池中的水體進行擾動來激起波浪。造波機的形式主要有搖板式造波機、推板式造波機、沖箱式造波機、氣動式造波機等[7]。其中,應用最廣泛的是搖板式和推板式兩種。這兩種造波機具有結構簡單、控制方便、維護簡便的優點。
以海氣界面觀測實景為目標,以目前國內外相關系統技術方案及指標為參考,結合水槽建設場地、環境等客觀條件限制,確定造風、造波系統主要參數如下:
(1)水槽尺寸為5 m×1 m×0.5 m,采用直長水槽結構,安裝尺寸滿足實驗室空間7 m×6 m×3 m要求;
(2)風浪水槽主體為玻璃水槽,水槽有效測量段下方開有光學窗口;
(3)造波波長范圍0.05~1.5 m,最大波高不小于0.2 m;波譜類型包括Pierson-Moskowitz譜、JONSWAP譜和Neuman譜,可自定義波譜;造波重復性誤差小于2%,有消波功能;
(4)造風最大風速不低于15.0 m/s,風速均勻,在觀測段內變化不超過±0.3 m/s。
2 造風造波系統結構設計
2.1 造波系統設計
由于搖板式造波機有搖板小、結構簡單及便于實時控制等優點,考慮到造波機水槽尺寸的要求及現場應用情況,因此,選用與國外先進的造波機相同的搖板造波方式。搖板式造波機就是通過機械驅動令搖板繞固定軸擺動,使池中水波動。其原理示意圖如圖1所示。
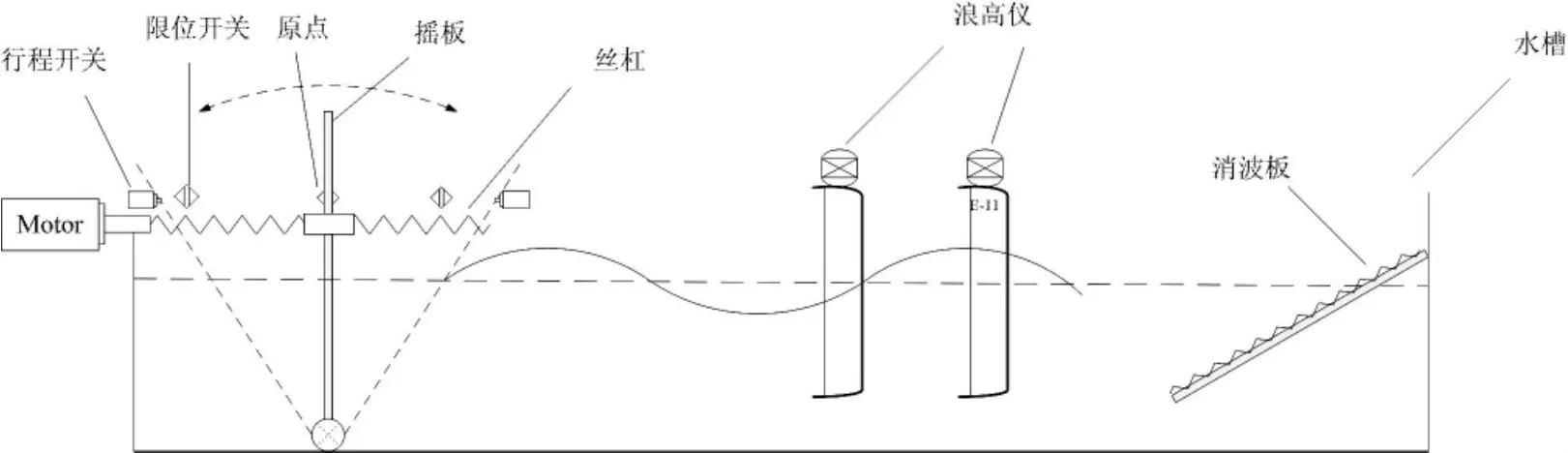
圖1 搖板造波機示意圖
搖板造波系統主要由驅動電機、線性模組(滾珠絲杠)、搖板等組成。目前運動控制系統按驅動方式不同,可分為電氣控制、液壓控制和氣動控制。經過比較分析各種控制系統的經濟性和控制精度,選用交流伺服電機驅動和運動控制卡內嵌于PC機的控制方式。上位機為工控機,主要完成各種波譜數據的計算、控制命令的發送、試驗數據采集處理以及對造波機運行狀況的監控;下位機為內嵌的NI4軸運動運動控制卡PCI-7390。伺服系統選用三菱公司生產的可與PCI-7390直接兼容的MR-J2S-70A驅動器和超低慣量中容量的HC-RP-103交流伺服電機。執行機構包括伺服電機和將旋轉運動轉換為直線運動的機械傳動裝置(線性模組)。
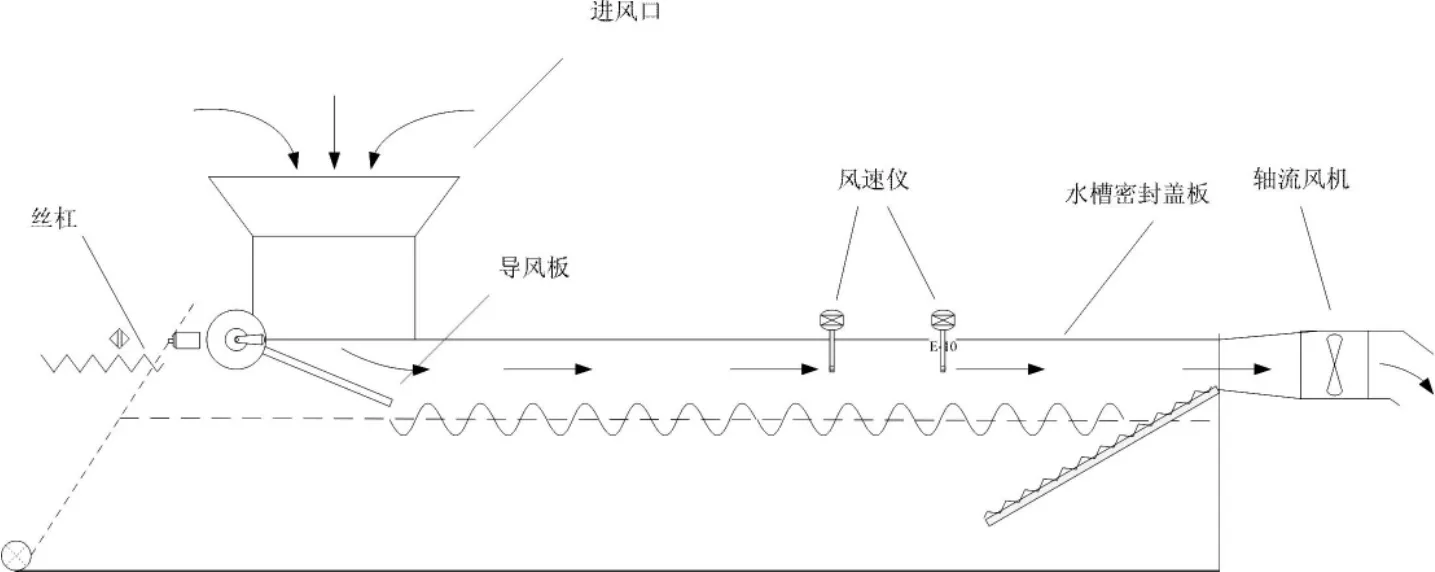
圖2 造風系統示意圖
為了運動控制的需要及搖板造波的安全,在滾珠絲杠的中間位置,安裝檢測原點的傳感器,在滾珠絲杠兩頭加裝兩套保護措施,即光電開關和行程開關。原點傳感器信號接入運動控制卡的Home輸入端子,作為搖板的平衡位置檢測輸入信號。光電開關位于行程開關內側,直接連接至運動控制卡的左右限位開關輸入端子,作為原點復位時的換向信號。行程開關位于光電開關外側,起搖板運行超限停機保護作用。
2.2 造風系統設計
在水槽頂部加蓋密封蓋板,構成風罩,與玻璃水槽共同形成一體化風道。為使水槽內風場分布均勻,在水槽尾部安裝軸流風機,以抽風的方式在水槽內造風。在水槽前端靠近搖板處安裝進風口,在進風口的下端安裝可調仰角導風板,便于對風向進行微調。造風系統結構示意圖如圖2所示。
根據設計最大風速的要求,對風機功率進行計算選型。
風速:V=15 m/s
風道截面積:F=l*h=1*0.2=0.2 m2
風量計算:Q=V*F=15*0.2=3 m3/s=10 800 m3/h
風機動壓:Pd=0.5*ρ*V2=15*1.237*152=139 Pa
風機靜壓:Pst=L*f=10*10 Pa=100 Pa
風機全壓:P=Pst+Pd=239 Pa
風機功率計算:
P=1.15*Q*P/(3600*1000*η)
=1.15*10800*239/(3600*1000*0.75)
≈1.1 kW
根據風機選型手冊,由計算數據留取一定域量,選取低噪聲節能大流量軸流風機,參數如表1。

表1 風機參數表
為實現風速可調,選擇三菱FR-F700系列2.2 kW的變頻器控制風機。三菱FR-F700通用變頻器最適合風機、泵類負載使用,內置噪聲濾波器,并帶有浪涌電流吸收回路,具有先進的壽命診斷及預警功能,操作維護簡單。
2.3 傳感器系統設計
為了構成搖板造波的閉環控制,在搖板前安裝有兩個浪高儀,實時檢測波面高度。為實現風速的無級自動調節閉環控制,在水槽試驗段前后兩側各放置一個熱膜風速傳感器,實時測量風道內的風速。
2.4 消波系統設計
由于水槽尺寸限制,試驗段和消波段相距很近,若要避免反射波對測量段的干擾,必須在水槽的另一端采取有效地消波方法。經過大量理論分析和現場試驗,最終采用波浪海綿消波結構,并在消波板下堆放鋼絲球,增加消波效果。
3 造風造波系統控制軟件設計
3.1 總體設計
造風造波系統控制軟件總體框圖如圖3所示。
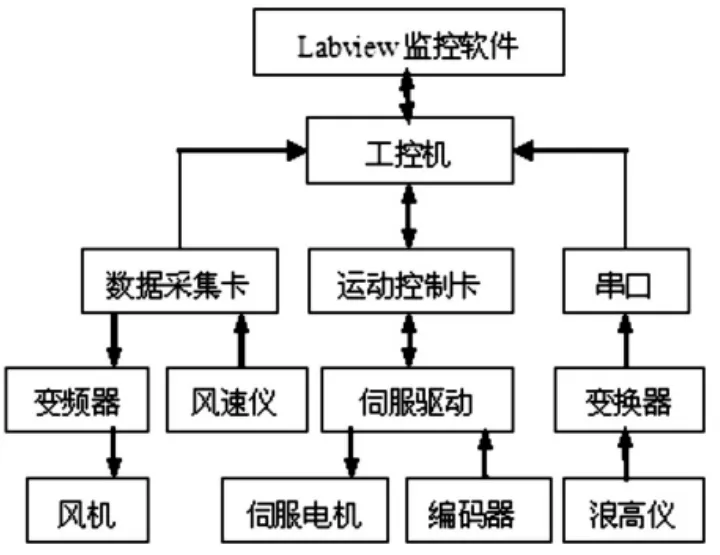
圖3 控制軟件總體框圖
3.2 搖板造波程序設計
搖板造波控制系統采用雙閉環結構。運動控制卡通過伺服驅動器控制電機,讀取伺服電機位置編碼器構成系統內環。上位機控制程序將浪高儀測量的實時波高數據與給定值比較,控制輸出,構成系統外環。程序框圖如圖4所示。
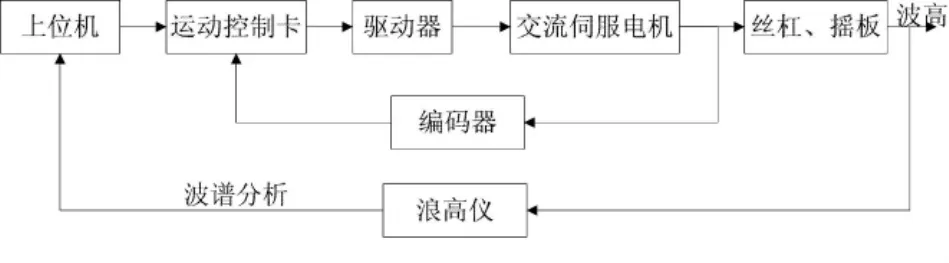
圖4 搖板造波程序框圖
規則波造波程序的實現包括設備的復位、參數的設置、搖幅及控制數據的計算。設備復位,即搖板原點復位。每次啟動程序前,需要判斷當搖板是否位于絲杠中間的原點位置,防止搖板運行時行程超限。規則波輸入參數為水深、波浪周期及波高。計算程序根據搖板搖幅和波高之間的關系,計算造波機的搖幅,得到搖板運動目標譜,并將連續的目標譜離散化,得到控制伺服電機運行的離散速度序列。在造波過程中,通過實時分段改變伺服電機的速度實現搖板的周期性變速運動。
造不規則波時,首先也需要執行搖板復位子程序。然后讀取前面板設定的參數,進行不規則波頻譜的模擬再現。在程序進入正式造波之前,計算程序模塊先進行頻譜計算,并將目標頻譜轉換為時域搖板運動目標譜,進而計算得到伺服電機的控制數據。
3.3 造風控制程序設計
造風控制系統主要有兩大功能,造風和定速反轉。造風即風機在正常情況工作時都處于抽風狀態,并且可以根據需要實時地改變風速。定速反轉為維護維修等特殊情況下需要風機工作在吹風狀態,其風速為預先設定的一個固定值。
風速的閉環控制采用的是經典控制理論PID控制算法。造風控制系統框圖如圖5所示。
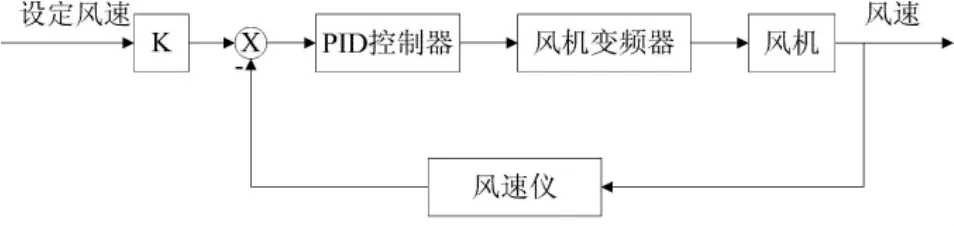
圖5 造風控制系統框圖
造風時,先輸入造風時間及風速設定值,計算機根據設定風速與風速儀測量得到的實際風速比較后采用PID算法,計算出相應的數字信號輸出值,經多功能數據采集卡進行D/A轉換為模擬信號量。通過變頻器改變風機電源頻率來改變風機轉速,實現風速的閉環控制。
由于風機反轉只有在維護維修時偶爾使用,對風速精度沒有嚴格的控制要求,對風速采用開環控制,即通過控制變頻器使風機工作在一個穩定頻率即可。
3.4 人機界面設計
LabVIEW提供很多外觀與傳統儀器如示波器、儀表盤等類似的控件,可用來方便地創建用戶界面。前面板的控件基本分為輸入控件和顯示控件兩大類,它們分別是VI的交互式輸入輸出端口。當使用LabVIEW程序框圖編程時,虛擬控件可以在前面板自動產生用戶界面,大大縮短了用戶開發界面的時間。
該控制系統界面組態了登錄界面、系統界面、風機界面、伺服界面、報警界面、數據查詢界面及波形數據查詢界面。除使用LabVIEW軟件直接提供的輸入輸出控件組態基本畫面外,還通過自定義輸入輸出控件實現了搖板運動動畫、風速動畫及波浪動畫的模擬,提高了系統的可讀性和趣味性。
4 實驗與結論
4.1 規則波測試
規則波測試部分數據列舉如圖6所示。
測試數據分析如表2所示。
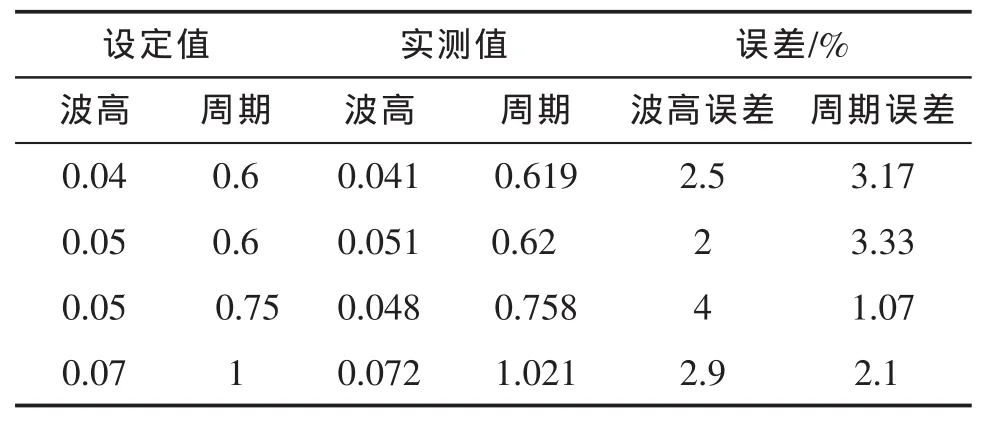
表2 規則波測試結果分析
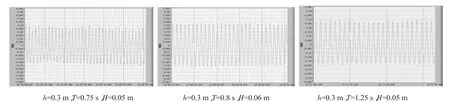
圖6 規則波測試
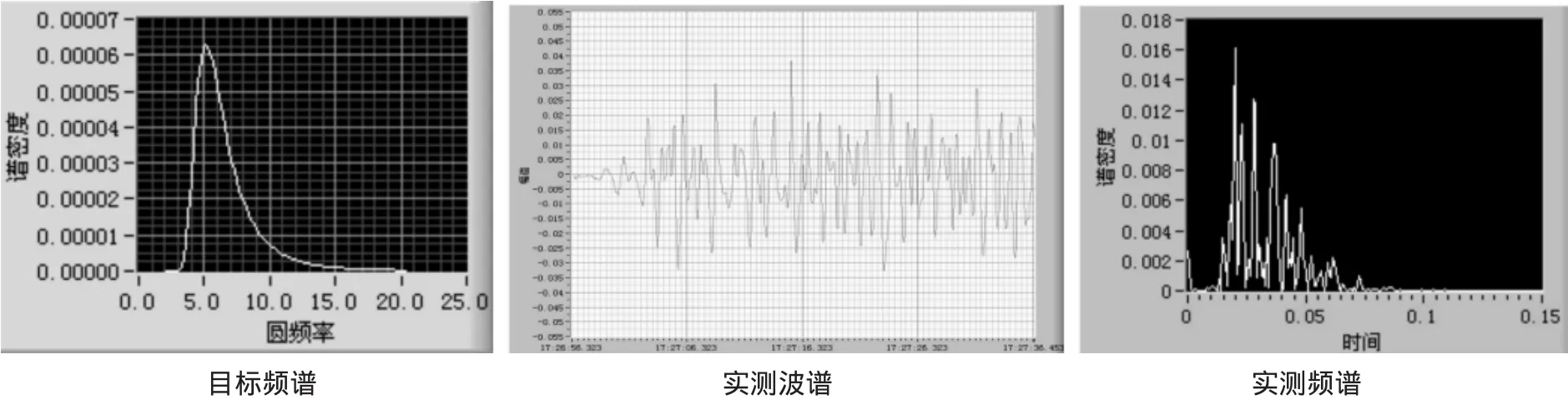
圖7 P-M譜測試(h=0.3 m,H1/3=0.06 m)
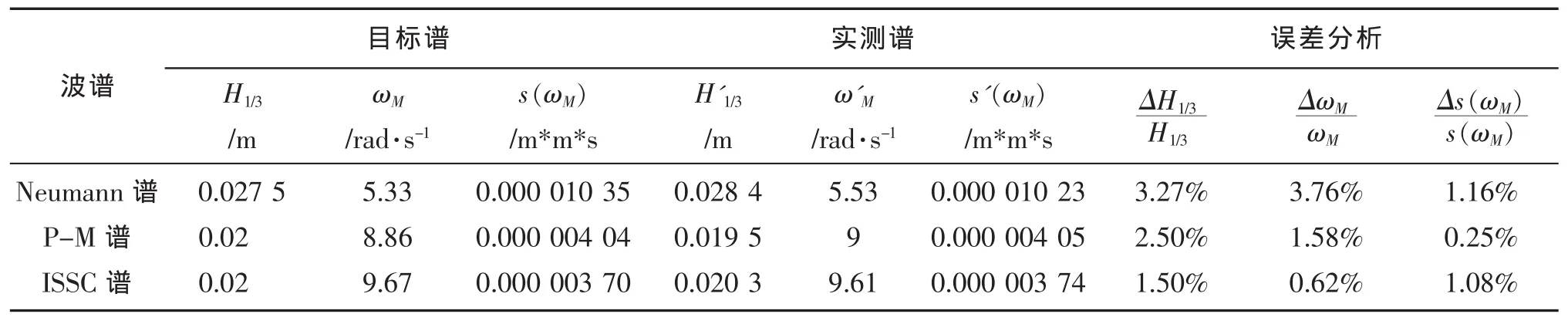
表3 不規則譜測試
實測波高模擬誤差≤4%,周期模擬誤差<4%,滿足試驗時對規則波模擬的精度要求。
4.2 不規則波測試
對不規則波的各種波譜進行了測試,以P-M譜的測試結果為例,如圖7所示。
對主要幾種不規則波的波譜進行了測試,結果如表3所示。
結果表明,各項指標均滿足不規則波模擬的精度要求。
5 結論
實踐證明,安裝于室內的小型風浪水槽造波機,不僅能夠通過搖板造波實現規則波與不規則波的模擬,而且能夠通過造風實現水面毛細波等微幅波的模擬,實現了造風造波和機械式造波的一體化。小型風浪水槽造波機的設計完成了綜合性水文試驗平臺的搭建,能夠較好地模擬實際海洋環境中海氣界面微尺度過程,為研究海氣相互作用提供方便的試驗平臺。
[1]Martin Gade,Werner Alpers,et al.Wind wave tank measurements ofwave damping and radar cross sections in the presence ofmonomolecular surface films[J].Geophysical Research,1998,103(C2):3167-3178.
[2]王崇賢.二維波浪水槽造波控制系統研究[D].天津:天津大學,2005.
[3]張群,李木國,等.海洋環境水槽液壓伺服造波機系統[J].中國海洋平臺,2002,8:20-22.
[4]孫龍,呂紅民,等.高頻波浪的測量與譜分析[J].海洋通報,2008,27(6):9-14.
[5]王立忠,潘冬子,等.波浪對海床作用的試驗研究[J].土木工程學報,2007,40(9):101-109.
[6]蔣仕龍.今天的通用運動控制技術[J].現代制造,2004,29:38-40.
[7]楊志國.國內外水池造波設備與造波技術的發展現狀[J].黑龍江科技信息,2003,9:97-99.
Design of Wind-Wave Making System for A Small Indoor Flume
GUAN Sheng1,WANG Yan-feng1,HUANG Zhen-xing2,GAO Jun-wei2
(1.The First Institute of Oceanography,SOA,Qingdao Shandong 266071,China;2.College of Automation Engineering,Qingdao University,Qingdao Shandong 266071,China)
The small indoor flume is the basis facility of the experimental research for many microscale processes of air-ocean interface.The wind-wave making system is the core of the flume.To meet the requirement of various micro-scale processes simulation,a wind-wave making system is designed.Through many experiments,the designed system is proven to be suitable for the planed index and capable of simulating a variety of wind and wave environment of air-ocean interface efficiently.
wind-wave flume;shake-flap wave maker;labVIEW;servo system;motion controller
TP273
B
1003-2029(2011)04-0006-05
2011-06-03
國家自然科學基金資助項目(41076062);中央級科學事業單位修繕購置專項“海氣界面微尺度過程光學探測實驗系統”資助
官晟(1972-),男,高級工程師,研究方向為海洋物理應用技術。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
電機與控制應用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
北京測繪(2020年12期)2020-12-29 01:33:58
當代陜西(2020年13期)2020-08-24 08:22:02
制造技術與機床(2017年5期)2018-01-19 02:49:17
家庭影院技術(2017年9期)2017-09-26 03:41:45
濰坊學院學報(2016年2期)2016-12-01 13:00:11
西南交通大學學報(2016年4期)2016-06-15 20:29:37