在漂泊狀態下使用WH ADCP測流
2011-01-10 01:41:48梁廣建王江偉
海洋技術學報 2011年4期
關鍵詞:測量
梁廣建 ,王江偉 ,徐 剛
(1.南海艦隊海洋水文氣象中心,廣東 湛江 524001;2.總參氣象水文局,北京 100073;3.92488部隊,廣東 湛江524064)
在漂泊狀態下使用WH ADCP測流
梁廣建1,王江偉2,徐 剛3
(1.南海艦隊海洋水文氣象中心,廣東 湛江 524001;2.總參氣象水文局,北京 100073;3.92488部隊,廣東 湛江524064)
WH ADCP主要用在沉底式潛標觀測和錨系式潛標觀測,在以調查船為平臺的海洋調查中則常用UCM、SLC等海流儀。由于WH ADCP具有體積小,可同時觀測多層的優點,可考慮將其用在以調查船為平臺的海洋調查中。介紹WH ADCP以調查船為平臺的海洋調查中的使用方法,并與OSADCP的測量結果進行分析對比,證明WH ADCP用在連續站觀測中效果理想。
WH ADCP;OS ADCP;海洋調查;海流
WH ADCP全稱Work Horse Broadband Acoustic Doppler Current Profilers[1],其工作原理與OS ADCP相同,是利用聲學多普勒原理對海流遙測,有不破壞流場和可同時觀測多層的優點[2],是目前海洋海流測量比較理想的工具。OSADCP為船載式走航測流儀,能在船只航行的情況下測量,其體積相對較大,安裝難度也大,必須安裝在船底,還需連接計算機機、GPS、羅徑才能工作。WH ADCP主要用于大洋浮標布放(錨系或座底),港口測量,湖泊測量,河道測量,岸邊測量等海洋監測中,它的特點是體積小,重量輕,攜帶和使用方便,能連續工作幾個月,既可自容,又可直讀,耗電低,精度高。在大洋的海洋調查中,連續站的海流觀測方法通常是利用絞車吊放UCM、SLC等單點海流儀,投放在標準層測流,為消除船舶噪聲等因素影響,一般每層觀測3 min,然后取平均[3],6個層次觀測時間約為20 min,層次越多,觀測時間越長,對流速變化大的海區無法達到同步觀測的目的。將WH ADCP用在連續站的海流觀測,能達到上下層同步觀測,而且得到5 min的采樣間隔,精確獲得海區各層海流的分布及變化趨勢。大型海洋綜合調查船雖然安裝OS ADCP,但其不能測表層流,而且受安裝、羅徑、環境擾動等因素影響測量精度[4]。本文對300 KWH ADCP在調查船漂泊狀態中的使用方式進行研究,并與船載式150KOSADCP結果進行對比分析。
1 吊放方式
1.1 向下測量吊放方式
在儀器吊放前,應先制作儀器架,儀器架的作用是方便儀器的吊放、維持其穩定的姿態和保護儀器,制作儀器架應注意的是探頭前方15°范圍內不應有障礙物。簡單的儀器架如圖1所示,由4根不銹鋼管組成,上下有吊環,中間有兩個圓盤固定儀器。向下測量吊放方式是用絞車將儀器吊放到海面,儀器探頭朝下進行測流,為增加儀器的穩定可在儀器的下方吊掛鉛魚,如圖2所示。儀器吊放在10 m的深度范圍內且深度應大于船體吃水深度,吊放時儀器盡可能的遠離船體,遠離船體有聲源的地方。這種方式的優點是吊放快捷,還可接上電纜實時數據顯示,及時掌握儀器的狀態。缺點是不能觀測表層流,在惡劣海況時船體的狀態和海面混響會對測量精度造成一定的影響。
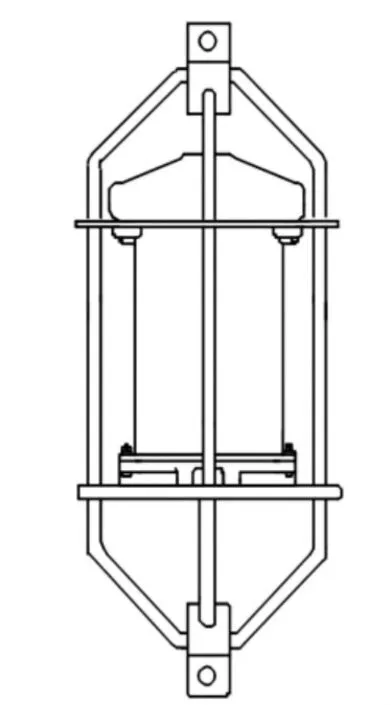
圖1 儀器架
1.2 向上測量吊放方式
將儀器吊放至儀器測量范圍內或指定深度,探頭朝上進行測量,如圖3所示,這種方式測量的優點是儀器遠離海面,消除了海面混響和船體的磁場等因素影響[5],而且深水流速小,能保證儀器在水下的姿態穩定,還能測表層流,惡劣海況對其影響較小,是推薦的使用方法。另外,在其下方還可增加測量儀器,儀器探頭朝下,如圖4所示,加大測量范圍。WH ADCP的型號有多種,它的頻率越小,測量范圍越大,但其分辯率越低,1200K WH ADCP層長最小可設為0.25 m,但其測量范圍僅為16 m以內。根據海流的變化主要在上層特點,向上測量使用分辨率高的WH ADCP 300K,層長可設為2 m,測量范圍為110 m,深層海流變化小則使用范圍大的WH ADCP 75K,測量范圍為800 m,層長可設為16 m,儀器吊放深度為110 m,整個測量深度可達910 m。缺點是在水淺時注意儀器觸底,且無法采用直讀方式。
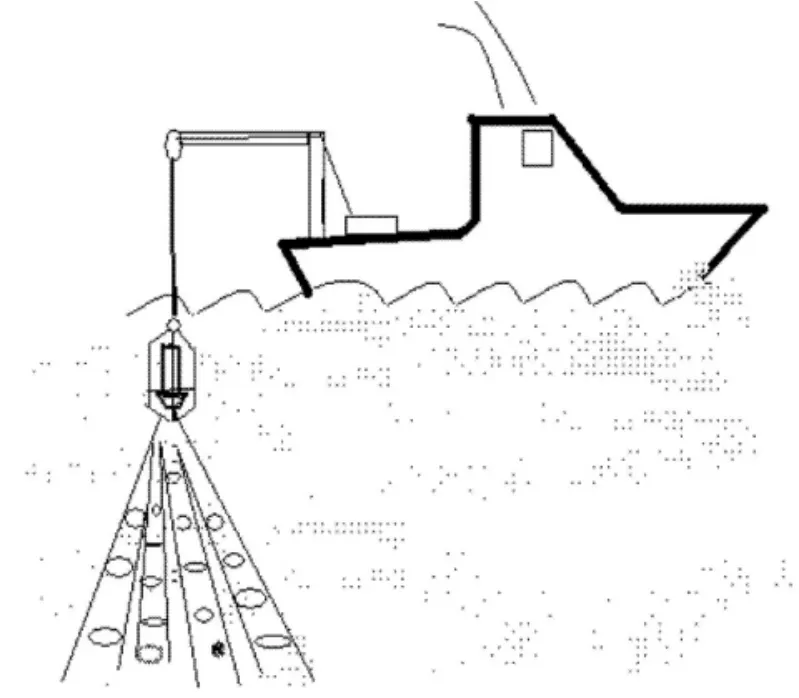
圖2 儀器向下測量的吊放示意圖
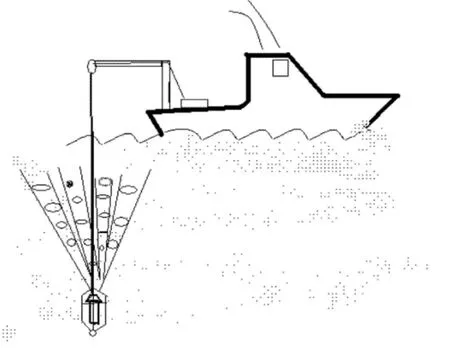
圖3 儀器向上測量的吊放示意圖
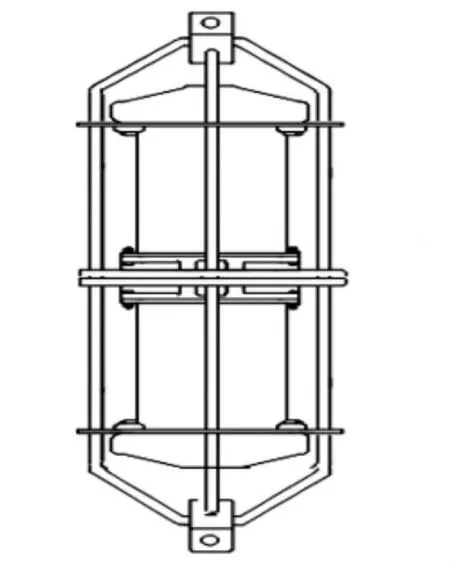
圖4 雙儀器吊放
2 資料預處理
資料預處理的主要內容是計算絕對流速及異常值處理。由于船的移動,儀器測的流速是相對船的流速而不是對地流速。當船拋錨時船的移速較小,基本可忽略,當船在漂泊時則船的移速較大,甚至超過流速,這時須刪除船速[6]。船速的刪除方法一般是利用GPS船位數據計算船速,通過矢量合成計算出真實流速。通過GPS計算船速的方法較多,常用的有逐點法、逐段法、實際航速平均法、起點終點法等,這里介紹一種適用的逐點法[7],方法是以ADCP儀器測量時間為中點將儀器測量平均間隔時間長度分為前后兩段,利用GPS在前段內取 7 個連續船位 P1,P2,P3,P4,P5,P6,P7及時間 T1,T2,T3,T4,T5,T6,T7,對應后段的船位 P1′,P2′,P3′,P4′,P5′,P6′,P7′及具體時間 T1′,T2′,T3′,T4′,T5′,T6′,T7′,對應點時間差為平均間隔的一半左右。利用前后段對應兩點的位置和時間計算相應的船速:νi=Si/ti,其中

Si為 Pi和 Pi′之間累積的距離,單位為 n mile,yi,yi′,xi,xi′分別為經緯度,單位為分,ti=Ti′-Ti為各段航行時間。刪除船速的最大值和最小值,或是認為不可靠的數據,對剩余的5個νi值進行平均(式2)算出船速船,通過矢量合成算出絕對流速絕=相+船

異常值可采用傳統的閾值判別法和變率判別法[8]。閾值判別法:根據要素可能的取值范圍設定相應的閾值,超過閾值的數據即可確認為異常數據或列為可疑異常數據。變率判別法:要素的時間變化率應在一定的范圍內,并具有某種規律性。可利用這一特性對異常觀測值進行判別。ADCP可用來判別的要素有水平流速流向、垂直流速、完好率、回波強度、羅徑值、縱橫搖值等。另外還可用濾波等方法判別。異常數據的處理:根據水文要素序列的特征和分析要求,采取簡單剔除或進行插值處理。測量過程中發現最多的異常值為下放或上升過程的數據,這些數據可通過垂直流速來判別。
3 測量結果分析
3.1 與VMADCP比對
利用一次海洋調查作業中使用的測流儀器300K WHADCP、150K OS ADCP進行數據分析比較,兩儀器距離60 m,測量地點為南海南部,水深大于2 000 m,由于海況較差,WHADCP采用水中探頭朝上方式測量,儀器投放深為105 m,采樣間隔5 min,層長4 m,連續觀測25 h(連續站),由于水深無法拋錨,船受風和海流影響有一定的速度,因此利用GPS信息采用逐段法計算船速。150KVMADCP探頭深度為4 m,采樣間隔5 min,層長8 m。為方便比較,將WHADCP與VMADCP數據通過三次樣條插值方法插值到整點時刻20 m,30 m,50 m,75 m層,流速分量對比如圖5和表1。
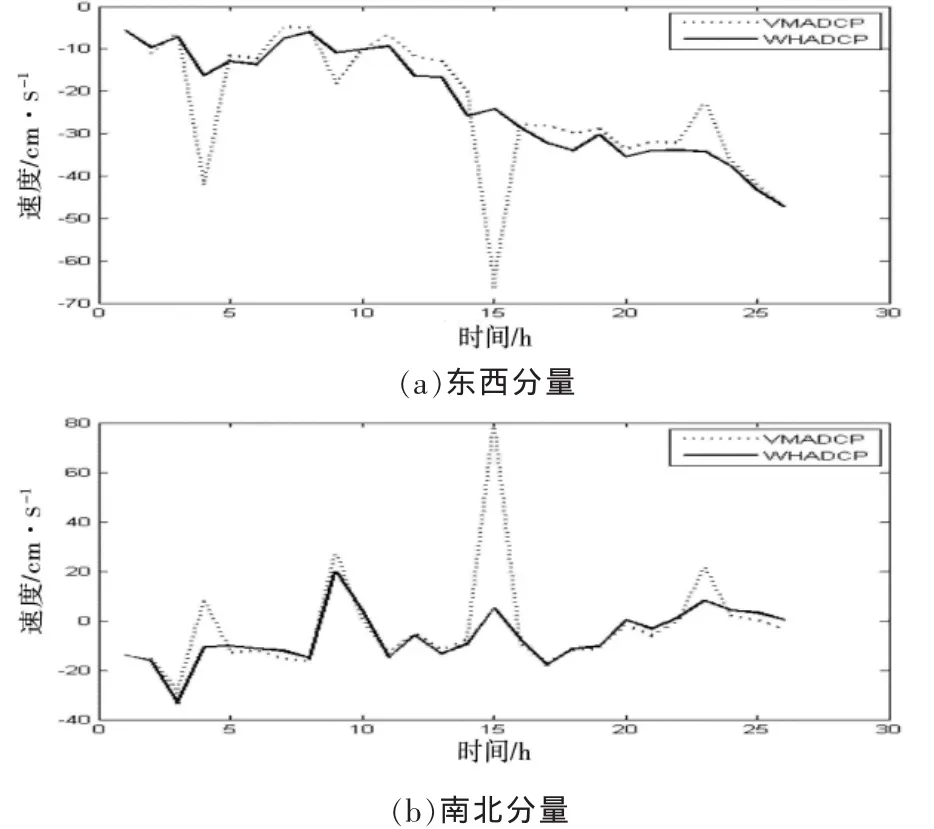
圖5 75 m層流速分量圖
從圖5及表1可看出,兩種儀器的測量數據總體趨勢一致,測量值相差不大,個別相差較大的從流速的時間變化來看是由OS ADCP突變引起,從圖中可判別為異常值,這跟儀器工作環境有關,OSADCP固定在船體上,受船體搖擺及海面噪聲干擾大,WH ADCP放至水下105 m,消除了船體的磁場及環境干擾的等影響。
3.2 儀器姿態分析
儀器在水下的姿態變化也影響到測量的精度,姿態變化越激烈,測量效果越差,儀器姿態可做為測量數據質量好壞的判斷依據。儀器在水下的姿態要素主要有縱搖、橫搖和羅徑,這些要素可通過儀器內部的傳感器獲得,圖6為WHADCP在水下的姿態變化圖。
圖中橫坐標為觀測次數,采樣間隔5 min,測量時風速較大,船的漂移速度也較大,圓圈變化激烈處為因船漂離測站太遠,需將儀器提出水面動船返回測站造成。測量時海況為4級,儀器在水中的縱搖和橫搖變化較小,最大分別為0.36°和0.67°,標準差為0.12和0.27,羅徑變化率稍大,最大為19°。總體來說姿態較穩定,均達到儀器的測量要求。圖7為只刪除船速沒有經異常值處理的矢量圖,圖中橫坐標為觀測次數,縱坐標為深度,從圖中可看出,WH ADCP觀測資料的異常值較少,且有很高時間分辨率和垂直空間分辨率,能很好地反映出時間和空間變化規律:海區的海流為層狀結構,說明海洋密度層結對流速結構的影響非常明顯[9],上層為東北流到東南流的轉變,中層為東北流到西北流的轉變,而底層基本維持偏北流。最上一層接近表層,測量時為西南風季節,風向為西南,流向基本與風向一致,為東北流。

表1 流速誤差分析表
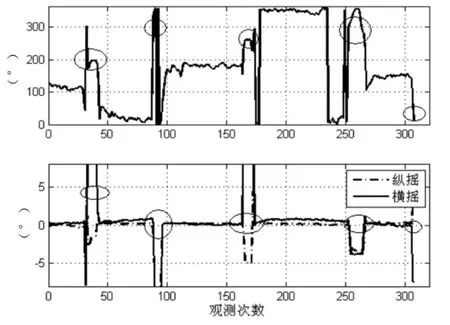
圖6 儀器姿態圖(上圖為羅徑,下圖為縱橫搖)

圖7 WHADCP觀測矢量圖
4 結論
WH ADCP在飄泊狀態下使用時,儀器在水下的姿態穩定,4級海況下縱橫搖的傾角均小于1°,測量結果與VMADCP具有很強的一致性,且異常值明顯少于VMADCP。采用向上測量方式,減少了船體磁場的影響,還能測量表層流,與VMADCP一起使用,彌補VMADCP無法測得表層的缺點,能較好在反映出海流隨時間和空間變化規律,因而可用于大洋海洋調查時的連續站觀測。
[1]RDInstruments.WorkHorse Technical Manual[M],1998.
[2]RDInstruments.Ocean Surveyor Technical Manual[M],1999.
[3]中華人民共和國國家質量監督檢驗檢疫總局.GB/T12763.2-2007.海洋調查規范:海洋水文觀測[S].北京:中國標準出版社,2007.
[4]刁新源,于非,葛人峰,等.船載ADCP測量誤差的因素分析和校正方法[J].海洋科學進展,2006,24(4):552-560.
[5]侍茂崇,高郭平,鮑獻文.海洋調查方法導論[M].青島:中國海洋大學出版社,2008.
[6] 吳中鼎,梁廣建,李占橋.ADCP 資料處理中的船速計算[J].海洋測繪,2004,24(5):13-15,19.
[7] 丁舉.利用 GPS測試船舶航速的算法研究[J].船舶工程,2005,27(3):5-8.
[8]陳上及,馬繼瑞.海洋數據處理分析方法及其運用[M].北京:海洋出版社,1991:445-448.
[9]杜巖,王東曉,陳榮裕,等.南海西邊界ADCP觀測海流的垂直結構[J].海洋工程,2004,22(2):31-38.
WH-ADCP Ocean Current Measuring on Float Boat
LIANG Guang-jian1,WANG Jiang-wei2,XU Gang3
(1.The Navy Fleet of the South Sea Hydrological and Meteorological Center,Zhanjiang Guangdong,524001,China;2.Meteorological and Hydrological Bureau of the General Staff,Beijing 100073,China;3.92488 Troops,Zhanjiang Guangdong 524064,China)
WH ADCP is primarily used in mooring observatory.The standard current observation platform in the ocean research vessel survey is often UCM,SLC and other ocean current meter.As WH ADCP is small and can be used to observe simultaneously multi levels.It can be considered as a platform in the ocean research vessel surveys.The WH ADCP onboard used for marine survey is introduced.The comparison results with the OS ADCP analysis is used to prove the effectiveness of WH ADCP in continuous observation stations.
WH ADCP;OS ADCP;ocean survey;ocean current
P715;TM 170.6050
B
1003-2029(2011)04-0038-04
2011-07-16
梁廣建(1969—),男,大學,高級工程師,主要從事海洋調查。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00