一種高動態性能數字DC-DC算法建模與芯片設計*
2010-12-21 06:28:22周浬皋李冬梅
電子器件 2010年4期
關鍵詞:系統
周浬皋,李冬梅
1.清華大學微電子學研究所, 北京100084;
2.清華大學電子工程系, 北京100084
手機、掌上電腦、MP4等多媒體設備需要精度高且穩定的供電,因此會配有專門的電源管理芯片。降壓型DC-DC是電源芯片當中的主要模塊,它將隨不穩定的電池電壓轉換成基帶芯片所要求的電壓,并且在負載變化的情況下依舊能保持電壓穩定。本文采用了一種新的結構,對反饋系統進行了優化,并以手機基帶供電為背景,提出指標,完成仿真和芯片設計。
文章第1部分簡單介紹降壓型DC-DC的工作原理和重要組成模塊;第2 部分描述算法設計的思路,接下來的第3部分介紹如何用硬件實現算法構想;最后給出了仿真結果、分析和結論。
1 工作原理
降壓型DC-DC的組成如圖1所示,虛線框以上為功率電路部分,它將電源電壓轉換成負載所要求的電壓,虛線框內是反饋控制部分,它將輸出電壓穩定在要求范圍內,使其不隨電源電壓、負載大小的變化而變化。其原理是利用反饋系統,對輸出電壓進行檢測,并通過補償算法來調整輸出脈沖的占空比,從而控制1、2開關的通斷時間,繼而控制輸出電壓。公式表示中, D代表輸出脈寬的占空比[1]:


圖1 數字降壓型DC-DC原理[2]
以手機基帶芯片供電這一應用為例, Vg代表手機電池,其輸出電壓變化范圍為2.4 V到3.3 V。R相當于基帶芯片負載,它是一個隨時變化的量。輸出電壓V則是芯片所獲得的電壓。虛線框內為數字校正部分,它由模數轉換器、補償算法、數字脈沖寬度調制器三部分組成。
2 算法分析
2.1 直接數字法介紹[ 3 ~5]
對于數字控制系統,通常有兩種建模的辦法:數字映射法和直接數字法。數字映射法是指先在模擬域內考慮補償函數,然后再將其轉化為數字信號來處理;直接數字法是將所有的模擬模塊全部建模成數字信號,直接在數字域里面尋找補償函數。數字映射法可以將模擬算法映射為數字算法,這樣可以利用模擬電路的豐富積累。但如果考慮功率轉換電路的相位裕度和帶寬,以及負載的瞬態響應,直接數字法是有優勢的。一來它是在一個更保守的環境下設計系統,這樣提高了設計的可靠性;二來直接數字法能夠更方便的控制階躍響應的波形。
2.2 系統建模[ 6]
功率電路的傳輸函數為:

利用直接數字法,將整個系統進行數字建模。先假定整個環路的延遲為一個周期,并且考慮DPWM的零階抽樣保持。

2.3 補償函數的尋找
對于BULK電路,在0 db時,相位為-180°,其相位裕度接近于零,見圖2。系統不穩定,須引入補償算法。
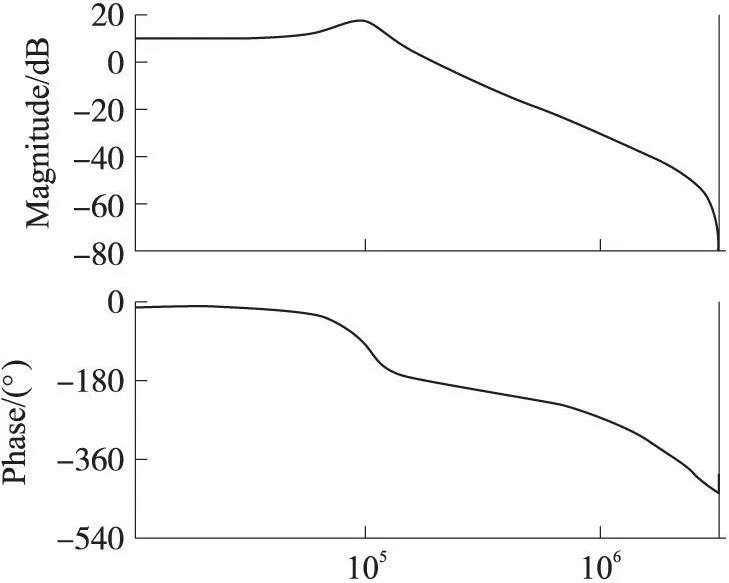
圖2 BULK電路開環波特圖
設補償算法的傳輸函數為C(z),系統開環傳遞函數為Hop,閉環傳遞函數為Hcl。
設補償函數具有如下形勢:

需要根據G(z)的特點,并且結合數字電路的可實現性,來確定補償函數零極點的個數和位置,從而使得閉環系統有良好的階躍響應。
傳統的方法是采用零極點相消,得到一個相位裕度足夠的開環波特圖,從而判斷其階躍響應。但這種方法對階躍響應的過沖、穩定時間的控制并不直觀。而利用MATLAB,在根軌跡中粗調補償零極點的位置,并且對開環波特圖進行細調,從而能夠更直接的控制階躍響應的波形,也提高了對波形精度的控制能力,使它更能貼近需求[7]。所得補償函數如下[8]:

2.4 周期個數對動態性能的影響
前面在建立系統函數的時候,假定系統在一個周期內能完成反饋。而通常的情況是輸出電壓經過模數轉換器需要一個周期,算法需要一個周期,脈寬調制器也可能增加一個周期。每增加一個周期,系統的相位裕度就會變差一些。對Z域而言,每多一個周期,就多了一個極點,這樣使得補償難度更大,階躍響應的動態性能更差。
表1對比了在此系統環境下,環路不同周期的延遲對階躍響應造成的影響。可以看出,周期的減少對動態性能與穩定性能均有較大的影響。因此本文嘗試用一個周期完成整個反饋過程。

表1 周期與階躍的關系
3 電路的實現
若要一個周期完成整個反饋運算,那么數模轉換與補償算法要在一個周期內完成,并且在下一個周期開始的那一刻,脈沖寬度調制器置為高電平,且輸出有效脈寬。系統的工作頻率為1 MHz,時序安排如圖3所示。

圖3 系統時序分配
3.1 ADC的設計
對于數字降壓型DC-DC而言,為使得輸出紋波較低(低于8 mV),同時又不出現極限環效應, ADC的最低有效位LSB的選取應該滿足如下關系:

其中Vr為最小輸出紋波, LSB為ADC最小采樣精度,最左邊的表達式是指輸出電壓的最小調節精度, n是指pwm的位數。結合電路指標, ADC的LSB選擇為5 mV。
在DC-DC的設計中,轉換效率是很重要的指標,因此ADC的功耗不能太大。同時,由于時序的要求,需要ADC在不到一個周期的時間內產生輸出。結合這些特點, ADC采用如圖4所示的結構[9]:

圖4 ADC的結構
左邊MOS開關與采樣電容、高增益運放構成一個采樣保持電路,其指標為50 ns內建立到0.1%,因此運放的增益要求為70 dB,帶寬為150 MHz。右邊是一個低壓VCO[10-11],其中心頻點約在1.25 V附近。此部分電路完成了對Vo信號的采樣,后面接計數器,將模擬量數字化,并完成校正和做差。
整個ADC的工作原理是,前50 ns采樣,然后用450 ns讓VCO起振,計數器記下VCO的震蕩個數,然后與預置的標準數做差,從而得出Vo與Vref誤差的數字輸出,見圖5 。

圖5 ADC的算法
3.2 算法的設計
在任何閉環系統的設計當中,開環增益是極其重要的參數,它直接影響反饋系統的穩定性以及建立精度。在DC-DC設計當中,最難的問題是確定系統的開環增益。整個環路中包括開關、ADC、PWM等模塊,因此不能簡單的認為補償函數與功率函數的總增益便是開環增益。目前尚沒有精確的理論分析來給出開環增益的推導過程,只好另辟途徑,采用測試的辦法。
在整個系統搭建起來之后,將系統在Vo與ADC的連接處斷開,并設補償函數的增益為1。在ADC的輸入端加入一個合適的電壓差量,并測量輸出Vo的值,相比得到的增益,便是算法增益歸一時的環路增益。將算法增益代入,便能得到整個系統的開環增益。
考慮一個周期的延遲,將補償函數轉化為差分方程:

3.3 DPWM的設計
這里需要一個10位的數字脈沖調制器(DPWM),脈寬的變化范圍是0 ns到1 023 ns,每個數值對應1 ns。傳統的結構是用32個的延遲單元構成低5位的延遲,然后再用一個5位的計數器,來實現高5位的延遲[12]。考慮功耗、面積等因素,本文依然沿用這一結構,但這一結構由于包含了豐富的數字電路,而脈寬最小單位為1 ns,因此容易產生競爭,尤其是在極小或極大輸出脈寬的情況下, RS觸發器無法正常啟動或復位,從而導致輸出脈寬產生根本性的誤差[13]。
考慮到輸出電壓一般是穩定在Vref附近,因此占空比在Vref/Vo附近的精度要求是最高的,而對于兩個極端情況,其精度對系統的影響可以忽略。因此,在算法部分,將容易使DPWM產生沖突的數值濾除掉,從而在不影響系統性能的情況下,極大的增加了系統的穩定性[14]。
4 結果分析
圖6所示是芯片的后仿結果,由圖可知,當負載從50 mA跳變到800 mA時,電路能夠在140 μs內穩定到1.25 V附近,紋波不超過5 mV,穩定的精度能達到0.5%。

圖6 仿真結果
實際電路仿真已取得良好的動態性能以及較高的建立精度,但與系統函數的仿真結果仍有少許差距:在負載跳變時,會出現短時間的震蕩。這主要是因為,在將系統數字化實現時,出現了參數量化、有限字長、高階極限環等效應的影響[15]。若要減少這些效應的影響,需要增加量化的精度,乘法器的位數等,這樣系統芯片的面積、功耗等開銷會有所增加。在實際應用中,可以根據情況進行折中。
[ 1] RobertW Erickson, Dragan Maksimovic.Fundamentals of Power Electronics SECOND EDITION[ M] .Page(s), 37-61.
[ 2] 孟浩.數字控制DC-DC開關電源研究[ D] .清華大學碩士學位論文, 2007.
[ 3]Peng H, Prodic A.Modeling of Quantization Effects in Digitally Controlled DC-DCConverters[ J] .IEEE Transactionson Power Electronics, 22(1):208-215.
[ 4] Lukic Z, Rahman N.MultibitΣ– PWM Digital Controller IC for DC-DCConverters Operating at Switching Frequencies beyond 10MH[ J].IEEE Transactions on Power Electronics, 22(5):1693-1707.
[ 5] A larcon E, Pao L.Proximate Time-Optimal Digital Control for DCDCConverters For Peer Review[ J] .IEEE Transactions on Power ElectronicsManuscript ID:TPEL-2007-07-0343 Manuscript Type:Regular Paper.
[ 6] Trevisan D, PMattavelli.Digital ControlofSingle-InductorMultiple-Output Step-Down DC–DCConverters in CCM.IEEE Transactions on Industrial Electronics, 55(9):3476-3483.
[ 7]Franklin G F, Powell JD, Workman M.Digital Control of Dynamic Systems[ M] .北京,清華大學出版社, 2001, 222-238.
[ 8] Bryant B, Kazimierczuk M.Voltage Loop ofBoost PWM DC-DCConverterswith Peak Current-Mode Control[ J].IEEE Transactions on Circuits and Systems Part 1:Regular Papers, 53(1):99-105.
[ 9] Chui Martin YeungKei, Ki W ingHung, Tsui ChiY ing.An Integrated Digital Controller for DC-DCSwitching Converterwith Dual-Band Switching[ C] //2003 Svmposium on VLSl Circuits Digest of Technical Papers.
[ 10] Straayer M, Perrott M.A 12-Bit, 10-MHz Bandwidth, Continuous-Time SigmaDelta ADC with a 5-Bit, 950-MS/s VCOBased Quantizer.IEEE Journal of Solid-State Circuits, 43(4):805-814.
[ 11] Wei P, Min P.Design of New CMOSQuadrature VCO[ J] .Chinese Journal of Electron Devices.
[ 12] Abram Dancy, Anantha Chandrakasan.A Reconfigurable Dual Output Low Power Digital PWM Power Converter[ J] .Low Power Electronics and Design, 1998, Page(s):191-196.
[ 13] Choe S, Ahn J.Dynam ic Simulator for a PEM Fuel Cell System with a PWM DC/DC Converter[ J] .IEEE Transactions on Energy Conversion, 23(2):669.
[ 14] Lukic Z, Wang K.Multibit 6 0 1 PWM Digital Controller IC for DC-DC Converters Operating at Switching Frequencies Beyond 10 MHz[ J] .IEEE Trans.Power Electron.22(5):1693-1707.
[ 15] 程佩青.數字信號處理教程(第二版)[M].北京:清華大學出版社, 2004, 392-440.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32