“人在回路”的載人航天器控制系統地面驗證平臺設計
2010-12-11 01:31:54李志宇
空間控制技術與應用 2010年4期
任 焜,李 彬,李志宇
(北京控制工程研究所,北京 100190)
“人在回路”的載人航天器控制系統地面驗證平臺設計
任 焜,李 彬,李志宇
(北京控制工程研究所,北京 100190)
針對載人航天器“人在回路”的特點,在評價現有人控交會對接試驗系統特點的基礎上對地面驗證系統設計原則進行歸納,提出一種載人航天器人工控制系統地面驗證平臺設計方案.該方案在繼承以往航天器自動控制系統地面測試系統設計要點的基礎上將“人”納入控制閉環中,確保了載人航天器人工控制系統地面驗證真實性.最后對平臺的信息流回路、光學變換器等關鍵技術進行了闡述.
人工控制;交會對接;模擬座艙;視景;光學變換器
中國是世界上第3個成功發射載人航天器的國家.與非載人航天器相比,載人航天器除配備自動控制系統外一般還配備了人工控制系統(以下稱人控系統),可由人參與完成對航天器的控制,其典型應用為人控交會對接,即航天員在航天器上對航天器的軌道和姿態進行觀測,并實施人工控制,完成兩航天器的交會對接[1].
由于人控系統中人處在控制閉環回路中,其地面驗證試驗需將人與設備共同納入控制回路,因此與自動控制系統的地面測試系統相比需考慮更多環節.以往航天器自動控制系統的地面測試平臺設計方案研究較深入,已積累了較豐富的地面激勵源設計、信息流設計等經驗,但對人控系統地面驗證平臺的設計方案研究不多.
本文以人控交會對接為背景,提出了“人在回路”[2]的載人航天器控制系統地面驗證平臺設計方法.
1 人控系統地面驗證平臺設計原則
1.1現有平臺特點分析
目前可用于人控交會對接的地面驗證系統主要有兩種形式,分別為交會對接半物理仿真運動模擬器、基于虛擬現實技術的交會對接人機控制仿真系統.
交會對接半物理仿真運動模擬器利用轉臺等設備實現對追蹤器和目標器的空間轉動和平動的模擬,一般通過簡化將兩航天器的12自由度運動簡化為9自由度運動.美國、歐洲、日本等均建立了此類運動模擬器用于地面驗證交會對接技術,如圖1所示[3].該運動模擬器可同時用于自動控制系統和人控系統的交會對接方案驗證,但存在一定局限,主要體現為:
1)在試驗距離、試驗轉角等方面受試驗場地、設備限制較大;
2)受室內背景限制,難以提供模擬太空環境的背景.
受上述條件限制,該系統一般僅用于人控交會對接方案驗證及典型工況下的交會對接系統驗證,難以達到工程研制階段測試覆蓋性要求.
交會對接人機控制仿真系統是利用虛擬現實技術建立的人控交會對接試驗系統,如圖2所示[4].它通過計算機軟件將交會對接場景進行動態顯示,為操作者提供了真實的對接圖像.操作者通過控制手柄向主控機的動力學模型施加激勵,由主控機產生動力學數據及航天器模擬顯示數據,并驅動相應的計算機生成圖像和模擬顯示參數.該仿真系統完全基于PC機和仿真軟件開發,缺乏對實際載人航天器信息流、敏感器的模擬,適于進行人控交會對接技術原理性研究及初步人機功效設計研究,但與實際工程驗證要求存在差距.
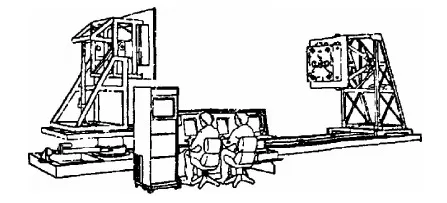
圖1 交會對接運動模擬器示意圖
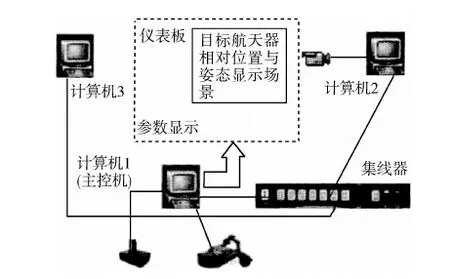
圖2 交會對接人機控制仿真系統
1.2平臺設計原則
為滿足載人航天器工程研制階段的地面驗證需求,達到對人控系統性能進行全面驗證的目的,需按照人控系統特點研制地面試驗平臺,滿足以下設計原則:
1)平臺應接入航天器真實設備.作為載人航天器工程研制階段的地面驗證平臺,其主要功能之一為驗證真實設備在系統中的功能、性能是否滿足要求,因此需按照航天器實際狀態將真實設備接入平臺,并且要求平臺具備對單機設備進行系統級驗證的能力.
2)平臺需具備真實的人機界面.人作為人控系統的主體,其狀態對系統試驗的結果影響較大,而人的發揮與環境、自身熟練程度等因素關系密切.為保證試驗有效性,需確保人能夠按照在軌實際狀態進入控制回路,因此需提供一套接近真實的人機界面,排除不真實環境對人的影響.
3)平臺應具備與航天器在軌狀態一致的信息流.為驗證航天器設備間的匹配性能及分系統整體性能,需設計與航天器一致的系統信息流體系,保證設備間硬件接口、協議、時延等與真實航天器一致.同時,要求人、機信息鏈路,包括供人觀察使用的圖像信息和數據信息等也保持與真實在軌環境一致.
4)利用仿真運動代替真實物理運動.航天器工程研制階段的工作重點轉為技術實現可靠性及設備間匹配性等方面.為確保測試覆蓋性,要求測試平臺能夠設置人控系統的全部任務工況(含正常、邊界和故障工況).半物理仿真運動模擬器無法滿足上述要求,而采用虛擬現實技術建立的仿真運動環境不受上述工況設置限制,能夠滿足測試覆蓋性要求.并且,仿真運動環境具有使用效率高、試驗開銷小等優勢.
2 人控系統地面驗證平臺設計方案
按照上述設計原則,提出圖3所示的載人航天器人控系統地面驗證平臺設計方案.系統主要由3部分組成,分別為模擬座艙、視景仿真系統和地面綜合閉環測試系統.
模擬座艙參照載人航天器狀態設計,為實施人工控制提供接近真實載人航天器環境的人機操作界面.艙內設置儀表面板、控制手柄等載人航天器真實設備,同時配備了模擬舷窗、模擬操作座椅及其他試驗輔助裝置.設備間相對位置關系也與真實航天器狀態一致.
視景仿真系統利用虛擬現實技術設計,它實時接收動力學數據,并驅動視景仿真軟件生成模擬太空圖像、交會對接模擬目標圖像以及模擬地球圖像,同時根據在軌環境下各種圖像的視線角特點設計相應的光學變換器,將各種圖像通過光學變換器變換為接近真實的模擬太空圖像,供人眼或人控系統專用設備觀察、采集.
地面綜合閉環系統參照星/船自動控制系統的地面試驗系統[5]設計,系統包含動力學仿真計算機、各種敏感器激勵源以及各種外系統的等效模擬器,具備完整的控制系統測試功能和完整的信息流體系.該系統能夠實現系統級仿真模擬,確保對人控系統設備及系統功能的測試有效性.
試驗時地面綜合閉環測試系統進行動力學仿真計算,并同時驅動各種敏感器、模擬器及視景仿真系統,視景仿真系統生成各種模擬圖像后按相應通道送出,并最終顯示在艙內儀表面板,操作者根據各種模擬圖像及狀態參數判斷航天器姿態和位置,并操縱控制手柄以及儀表面板對航天器實施控制,系統控制器接收各種敏感器信號以及操作者的控制指令,進行計算并輸出執行機構控制指令及各種狀態參數.
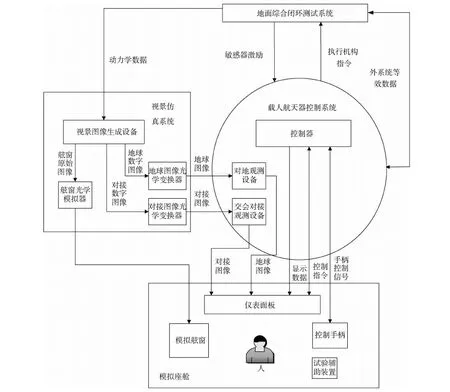
圖3 人控系統地面驗證平臺組成框圖
3 人控系統地面驗證平臺關鍵技術
3.1基于“人”的信息體系
以往星/船自動控制系統地面測試平臺對象為控制系統產品,信息鏈路設計主要針對信號接口、軟件協議等開展,設計方法相對成熟.載人航天器人控系統地面驗證平臺在繼承了上述信息鏈路設計特點的同時還需將“人”引入控制回路,構建以人為中心的信息體系.系統具有以下難點:
1)人機界面復現程度要求高.在自動控制系統地面測試中,對接地、電磁兼容、隔離等測試環境進行綜合設計,不需對設備布局、安裝狀態等嚴格要求,而人控系統地面測試為保證人以真實狀態參與閉環控制,對人機界面提出了較高要求,對設備布局、操作方式、信號特征等均要求與真實航天器保持一致.
2)信號模擬方式要求多樣.在自動控制系統測試中,信號形式主要有光、電、電磁波等.而人控系統除上述信號形式外,還需為人和航天器設備輸出圖像信號,真實獲得太空圖像的難度很大,需借助虛擬現實技術.隨著計算機技術的發展,利用計算機視景模擬太空圖像的技術已日益成熟.圖4是視景仿真系統的組成框圖.圖中4臺高性能計算機中3臺分別作為舷窗、對地觀測以及交會對接的視景圖像生成設備,剩下1臺作為3臺計算機的調度計算機,用于實現對3臺計算機的遠程軟件設置、加斷電操作及數據保存等.各計算機通過網絡接收動力學數據生成圖像并傳送至相應的顯示通道.
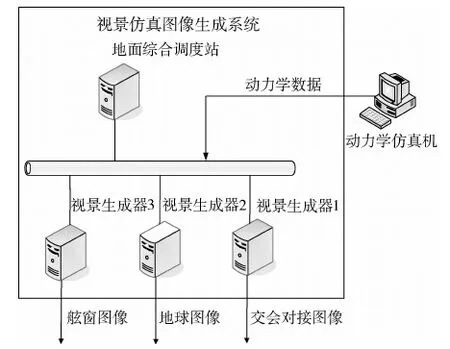
圖4 視景仿真系統框圖
3.2光學變換器
人控系統交會對接觀測設備和對地觀測設備等專用設備的輸入信號均為可見光圖像,為在系統閉環回路中引入上述設備,模擬激勵源需滿足以下要求:
1)激勵源為閉環動態圖像信號;
2)激勵源光學特性滿足航天器設備光學系統要求.
光學變換器接收視景生成計算機的數字圖像,經光學系統變換為航天器設備所需的光學圖像,如圖5所示.航天器設備與光學變換器通過精確裝調安裝成一體,保證模擬器光學系統與航天器設備光學系統對接.
上述光學變換器還具有如下優點:
1)光強控制能力強.太空環境由于缺少空氣、塵埃等反射作用,光強變化范圍巨大,因此航天器設備的背景光調節(以下稱調光)能力是地面需進行重點驗證的項目.而在實物成像試驗中,由于缺乏手段模擬極端宇宙背景光強變化,因此難以對設備的調光能力進行全面驗證.而模擬器光路與設備光路完全對接,作用距離短,背景封閉,從而容易實現對進入設備的光強的調節,到達驗證設備調光能力的要求;
2)試驗場地要求低.以交會對接成像設備為例,若采用實物成像,則要求試驗場地長度至少上百米才可完成設備的測量范圍檢查.與實物成像相比,利用光學變換器光路將圖像變換為虛像,依靠虛擬手段控制設備的成像距離,就能使普通試驗室環境下的動態成像測試成為可能.
4 結 論
本文針對“人在回路”的載人航天器人工控制系統特點,總結了工程研制階段人控系統地面驗證平臺設計原則,提出了具有針對性的地面驗證系統設計方案,該方案在繼承以往航天器自動控制系統地面試驗系統設計要點的基礎上將“人”納入控制閉環中,確保了人控系統地面驗證的真實性,能夠對載人航天器人工控制系統的工程研制起到重要作用.
[1] 蔣自成.基于虛擬現實的航天器手控交會技術研究[D].長沙:國防科學技術大學,2008
[2] Wigbert F.Automated rendezous and docking of spacecraft[M].Cambridge:Cambridge University,2003
[3] 張新邦,劉良棟,劉慎釗.航天器交會仿真試驗的運動模擬器[J].空間控制技術與應用,2009,35(2):51-55
[4] 曲戰勝,王春慧.交會對接人機控制仿真系統的研究[J].測控技術,2006,25(增刊):403-405
[5] 屠善澄.衛星姿態動力學與控制[M].北京:中國宇航出版社,1998
“Man-in-the-Loop”DesignofVerificationPlatformfortheMannedSpacecraftControlSystem
REN Kun,LI Bin,LI Zhiyu
(BeijingInstituteofControlEngineering,Beijing100190,China)
The existing test systems for manual-control rendezvous and docking technique are reviewed.Based on the characteristics of man-in-the-loop for a manned spacecraft,the design principle of ground verification system is thoroughly studied.As a result,a general design scheme is established.In this design,the essential elements of the conventional ground verification system for spacecraft autocontrol systems are kept,and man is included in the control loop as well.Finally key techniques such as man-based data link,optical converter and so on are described.
manual-control;rendezvous and docking;simulation cabin;virtual vision;optical converter
2010-06-12
任焜(1978—),男,貴州人,工程師,研究方向為控制系統總體設計(e-mail:rengreat@sina.com).
V448
A
1674-1579(2010)04-0050-04
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(2017年9期)2017-09-26 03:41:45
工業設計(2016年12期)2016-04-16 02:52:00
