一類衛(wèi)星推力器布局的多目標優(yōu)化設(shè)計方法
2010-12-11 01:31:54武云麗
空間控制技術(shù)與應(yīng)用 2010年4期
關(guān)鍵詞:優(yōu)化
林 波,武云麗
(1.北京控制工程研究所,北京 100190;2.空間智能控制技術(shù)國家級重點實驗室,北京100190)
一類衛(wèi)星推力器布局的多目標優(yōu)化設(shè)計方法
林 波1,2,武云麗1,2
(1.北京控制工程研究所,北京 100190;2.空間智能控制技術(shù)國家級重點實驗室,北京100190)
針對一類衛(wèi)星平臺的推力器布局進行優(yōu)化方法建模,給出推力器布局設(shè)計原則和優(yōu)化指標,將推力器布局問題轉(zhuǎn)化為一個多約束多目標尋優(yōu)問題.最后對IntelSat-VII/VIIA推力器布局進行優(yōu)化設(shè)計,優(yōu)化結(jié)果達到了預(yù)期效果,驗證了本文方法和指標的有效性.
推力器布局;姿態(tài)控制;航天器;布局優(yōu)化
隨著現(xiàn)代衛(wèi)星平臺的任務(wù)和功能日益多元化,攜帶的載荷和其他設(shè)備越來越復(fù)雜,導(dǎo)致衛(wèi)星平臺上各種設(shè)備的布局日益復(fù)雜,需要考慮的限制條件更多.作為衛(wèi)星控制系統(tǒng)所需的推力器,安裝臺數(shù)一般多達12臺以上,其布局需要考慮推力器羽流、熱輻射、以及燃燒物等對整星以及其他有效載荷的影響,因此對其安裝位置和安裝角度有較為嚴格的要求.早期的衛(wèi)星平臺結(jié)構(gòu)簡單,布局空間余量大,12個推力器一般布置在過衛(wèi)星質(zhì)心的三個正交面附近,例如中國的東方紅三號衛(wèi)星平臺、北斗二號衛(wèi)星平臺屬于這種安裝方式,其優(yōu)點是單個推力器工作時對其他兩個軸的干擾力矩較小.隨著衛(wèi)星有效載荷逐步增加,結(jié)構(gòu)也日趨復(fù)雜,推力器已不能完全安裝在過衛(wèi)星質(zhì)心的平面附近.例如,SS/L-1300衛(wèi)星平臺推力器基本安裝在星體±Z面的4個頂角附近[1];日本的DRTS(date relay test satellite)衛(wèi)星安裝了12個推力器,其中4個位于過質(zhì)心的XOY面內(nèi),其余8個推力器也均安裝在±Z面上的頂角上[2];美國基于LS3000平臺的IntelSat VII/VIIA衛(wèi)星[3](布局見圖1)東西板上分別安裝了4GHz和6GHz的對地固面天線反射器,南北板上安裝有大型柔性太陽翼,為了避開推力器對這些部件的影響,12臺推力器全部安裝在衛(wèi)星的對地和背地板上,其中有8個推力器裝在對地板和背地板的4個角上;中國的東方紅四號衛(wèi)星平臺推力器布局也大多安裝在衛(wèi)星±Z面的4個角附近.由于這類衛(wèi)星平臺的推力器安裝面不過衛(wèi)星的質(zhì)心,因此單個推力器工作時會同時產(chǎn)生兩個方向的控制力矩,在進行姿軌控時需要同時開啟2個推力器組合使用才能獲得期望的控制力矩.
IntelSat VII/VIIA衛(wèi)星采用的這種推力器布局方式在國內(nèi)外有廣泛應(yīng)用,本文針對類似平臺下的一類衛(wèi)星的推力器布局和約束條件進行分析,給出推力器布局的優(yōu)化方法和模型,最后利用優(yōu)化方法和模型進行了推力器布局設(shè)計,獲得較好的效果.
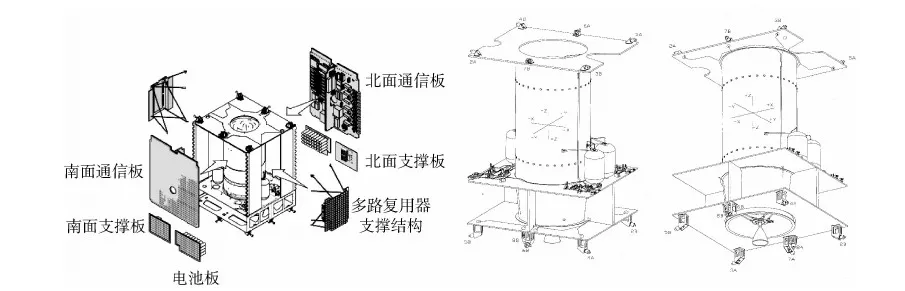
圖1 IntelSat VII推力器布局[3]
1 推力器布局模型
定義衛(wèi)星機械坐標系為:原點位于衛(wèi)星與運載火箭機械分離面內(nèi),原點固聯(lián)在衛(wèi)星上,并與星箭分離面上的3個銷釘所組成的理論圓的圓心重合,z軸垂直于衛(wèi)星與運載火箭的連接分離面,其正方向從原點指向?qū)Φ匕澹瑇軸的正方向從原點指向衛(wèi)星東板,y軸的正方向從原點指向衛(wèi)星南板.定義衛(wèi)星本體坐標系為:原點在整星質(zhì)心,xb、yb和zb3軸分別平行于機械坐標系3個軸.假設(shè)單個推力器標稱推力為F,推力矢量F=[Fx,Fy,Fz]在衛(wèi)星本體坐標系中方位角和仰角分別為φ和θ,其中φ∈[0,360°]為推力矢量F在衛(wèi)星本體系oxbyb平面內(nèi)與xb軸的夾角,θ∈[-90°,90°]為推力矢量F與衛(wèi)星本體系oxbyb平面的夾角.Rc=[xc,yc,zc]為整星質(zhì)心在機械坐標系中的位置矢量.R=[x,y,z]為推力器在機械坐標系中的位置矢量,D=R-Rc=[x-xc,y-yc,z-zc]為推力器在衛(wèi)星本體坐標系中的位置矢量,見圖2.
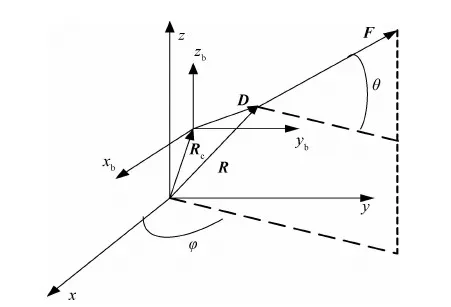
圖2 單個推力器推力矢量方位
這里定義Mx,My,Mz分別為推力器產(chǎn)生的三軸力矩;α,β,γ分別為推力矢量F與xb,yb,zb三個軸的夾角,則依據(jù)圖2可得到上述變量間有如下關(guān)系:
α=arccos(cosθcosφ),
β=arccos(cosθsinφ),
γ=arccos(sinθ),
式中,F(xiàn)、D為F、D的模.
安裝角度滿足約束方程:

安裝位置和力矩滿足約束方程為:
其中,


由上述方程可見,單個推力器的安裝位置和方位可由位置矢量R和兩個方位角φ,θ唯一確定,推力器的布局問題描述為在衛(wèi)星的可行安裝區(qū)域和方位范圍內(nèi)尋求一個最佳的S=[x,y,z,φ,θ],單個推力器其可行區(qū)域描述為一組取值區(qū)間
x∈[xl,xh],y∈[yl,yh],z∈[zl,zh],
式(7)可簡單記為S∈[Sl,Sh].
2 推力器布局組合優(yōu)化策略
對于衛(wèi)星系統(tǒng)而言,其控制往往需要多個推力器組合工作,因此除了考慮單個推力器的工作效率外,還需要考慮多個推力器配合使用的問題.例如,衛(wèi)星在進行軌道控制時需要產(chǎn)生的推力盡可能最大,同時對姿態(tài)的干擾力矩盡可能最小;而在進行姿態(tài)控制的時候要求產(chǎn)生的控制力矩盡可能最大,同時對衛(wèi)星位置干擾盡可能最小;此外,布局時還需要避免推力器羽流、燃燒殘余物等對相鄰設(shè)備的影響等.因此,衛(wèi)星推力器布局為一個多維、多約束條件下的多目標優(yōu)化問題.
2.1推力器布局原則
本文以IntelSat VII/VIIA推力器布局方式作為例子進行優(yōu)化,這種布局方式具有廣泛代表性.在IntelSat VII/VIIA衛(wèi)星共安裝有12臺推力器,A/B兩份互為備份,各6臺,編號為2A/B、3A/B、4A/B、5A/B、6A/B、7A/B,其位置關(guān)系見圖1.衛(wèi)星在軌運行中遠地點模式A/B分支都開啟,其余模式下A或B分支開啟其一.B分支作為A分支的備份.以A分支為例,在進行姿軌控時各個推力器組合如下:
a.2A+3A:向東位保,產(chǎn)生-X向推力-Fx;
b.4A+5A:向西位保,產(chǎn)生+X向推力Fx;
c.2A+4A:姿態(tài)控制,產(chǎn)生+Y軸姿態(tài)控制力矩+My;
d.3A+5A:姿態(tài)控制,產(chǎn)生-Y軸姿態(tài)控制力矩-My;
e.2A+5A:姿態(tài)控制,產(chǎn)生+Z軸姿態(tài)控制力矩+Mz;
f.3A+4A:姿態(tài)控制,產(chǎn)生-Z軸姿態(tài)控制力矩-Mz.
按上述組合方式可知,2A、3A、4A、5A推力器既要進行軌控又要進行Y軸和Z軸的姿態(tài)控制,在布局時需要兼顧考慮.例如,A分支布局需要滿足以下原則:
a.2A+3A向東位保時產(chǎn)生-X向的推力最大,而對向南或向北的干擾推力最小;
b.2A+3A向東為保時盡可能在三軸上不產(chǎn)生干擾力矩;
c.4A+5A向西位保時三軸干擾力矩最小;
d.2A+4A應(yīng)在+Y軸上提供最大的控制力矩,而在另外兩軸上產(chǎn)生的力矩最小;
e.3A+5A在應(yīng)在-Y軸上提供最大的控制力矩,而在另外兩軸上產(chǎn)生的力矩最小;
f.2A+5A應(yīng)在+Z軸上提供最大的控制力矩,而在另外兩軸上產(chǎn)生的力矩最小;
g.3A+4A在應(yīng)在-Z軸上提供最大的控制力矩,而在另外兩軸上產(chǎn)生的力矩最小.
此外,還需要考慮推力器附近設(shè)備的安裝及羽流對周邊設(shè)備的影響等.對于這些因素,一般可通過限定推力器安裝位置的可行域或者安裝方位的可行域來達到目的,因此,對于推力器2、3、4、5的安裝位置和角度需要進行優(yōu)化,以滿足上述原則.
2.2推力器優(yōu)化指標設(shè)計
依據(jù)上述布局原則,設(shè)計優(yōu)化指標如下:
a.位保指標函數(shù)
向東位保指標函數(shù)為:
向西位保指標函數(shù)為:
式中,JF,2A+3A為位保推力指標函數(shù),N為期望的推力值.物理意義是讓向東位保推力在X軸盡可能接近N,即滿足F2Ax+F3Ax=N,在Y軸和Z軸上產(chǎn)生的推力盡可能接近0,即滿足F2Ay+F3Ay=0、F2Az+F3Az=0;JM,2A+3A向東位保干擾力矩指標函數(shù),其物理意義是2A+3A推力器進行向東位保時產(chǎn)生的干擾力矩最小.
b.姿態(tài)控制指標函數(shù)
式中,JM,2A+4A為Y軸控制力矩指標,物理意義是讓2A+4A產(chǎn)生+Y方向期望力矩Mynom,同時讓X軸和Z軸上的力矩最小;JM,2A+5A為Z軸控制力矩指標,物理意義是讓2A+5A產(chǎn)生+Z方向期望力矩Mznom,同時讓X軸和Y軸的力矩最小;
c.綜合指標:
式中,ki(i=1,…,6)為加權(quán)系數(shù),k1,k2,k3,k4為東西位保指標的加權(quán)系數(shù),k5,k6為Y軸和Z軸姿控指標的加權(quán)系數(shù),可依據(jù)實際應(yīng)用調(diào)整某個指標的權(quán)重.一般情況下,衛(wèi)星在長期運行期間推力器主要用于進行位置保持和角動量卸載,而通常進行位置保持所消耗的推進劑比進行卸載消耗的要多,因此同步軌道段主要應(yīng)考慮提高位置保持的效率,即系數(shù)k1,k2,k3,k4應(yīng)選擇較大,而k5,k6系數(shù)則相應(yīng)小一些.
推力器布局問題最終轉(zhuǎn)化為尋求一組X=[S2A,S3A,S4A,S5A]使式(15)表示的指標最小:
J=minF(X)=min{k1F2+3+k2M2+3+k3F4+5+k4M4+5+k5M2+4+k6M2+5},
2.3優(yōu)化算法
對于2.2節(jié)所描述的優(yōu)化問題,求解方法較多.例如,有基于粒子群的多目標優(yōu)化算法[4]、遺傳算法等[5],該類算法特點是使用種群、適應(yīng)值以及繁衍等概念,容易在可行區(qū)間能尋求的全局最優(yōu)解,缺點是計算量大,計算時間消耗多;另外還有基于梯度的算法,如牛頓內(nèi)點法[6-7],共軛梯度法等,該類方法求解速度快,對于非凸集則會求解得到局部最優(yōu)解,優(yōu)點是算法成熟且在Matlab等商業(yè)軟件中有優(yōu)化工具箱.針對具有不等式約束優(yōu)化問題Matlab提供了一個通用的求解函數(shù)fmincon(x),使用者只需要給出指標描述函數(shù)和優(yōu)化變量的約束條件就可求解.本文利用Matlab提供的函數(shù)進行優(yōu)化計算.Matlab提供的fmincon(x)函數(shù)能夠?qū)κ?16)~(18)描述的多重約束問題進行優(yōu)化:
優(yōu)化向量X滿足:
式中,f(X)為優(yōu)化目標函數(shù),g(X)為不等式約束,h(X)為等式約束,且g(X)和h(X)可為向量X的非線性函數(shù).
對于式(16)~(18)的約束優(yōu)化問題,通過Lagrangian乘子法轉(zhuǎn)化為式(19)描述的無約束優(yōu)化問題,利用梯度法求解.

梯度法計算步驟如下:
Step1: 給定初始點X0和收斂精度ε,
Step2: 計算第k步的梯度ΔL(Xk,λ),
Step3: 令dk=-ΔL(Xk,λ),
Step5:Xk+1=Xk+σdk,
Step6: 若‖ΔL(Xk,λ)‖≤ε,則X*=Xk.
退出計算,否則,轉(zhuǎn)入Step2繼續(xù)迭代.
梯度法是fmincon(x)函數(shù)可選的求解方法之一,還可以通過Matlab提供的optimset函數(shù)設(shè)置其他求解方法.
3 推力器布局優(yōu)化算例
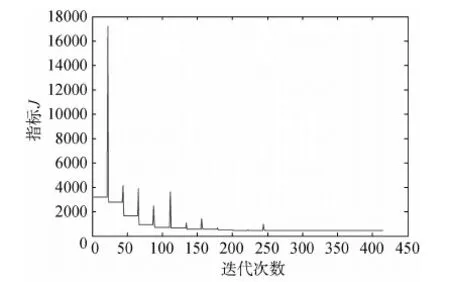
圖3 指標收斂曲線
優(yōu)化前后的安裝位置和安裝角度見表2,優(yōu)化前后推力和力矩見表3.表2中,優(yōu)化前推力器4A不滿足表1給定的約束范圍,優(yōu)化后位置和角度均滿足位置和角度約束.表3中,以+Y軸姿態(tài)控制為例,優(yōu)化前在X軸上產(chǎn)生約-6.18N·m的干擾力矩,在Z軸產(chǎn)生約-7.055N·m的干擾力矩,優(yōu)化后干擾力矩大幅降低,X軸約3.38N·m,Z軸約-0.73N·m;Y軸姿控力矩達到約27N·m,Z軸姿控力矩達到約14N·m,優(yōu)化前后控制力矩改善明顯;優(yōu)化后向東位保時產(chǎn)生18.46N的推力,在三軸上產(chǎn)生的力矩不大于0.6N·m,向西位保產(chǎn)生-15.76N的推力,在Y軸約-1.28N·m的力矩,約為Y軸控制力矩的5%,對姿態(tài)控制影響不大.

表1 推力器安裝位置和方位角約束范圍
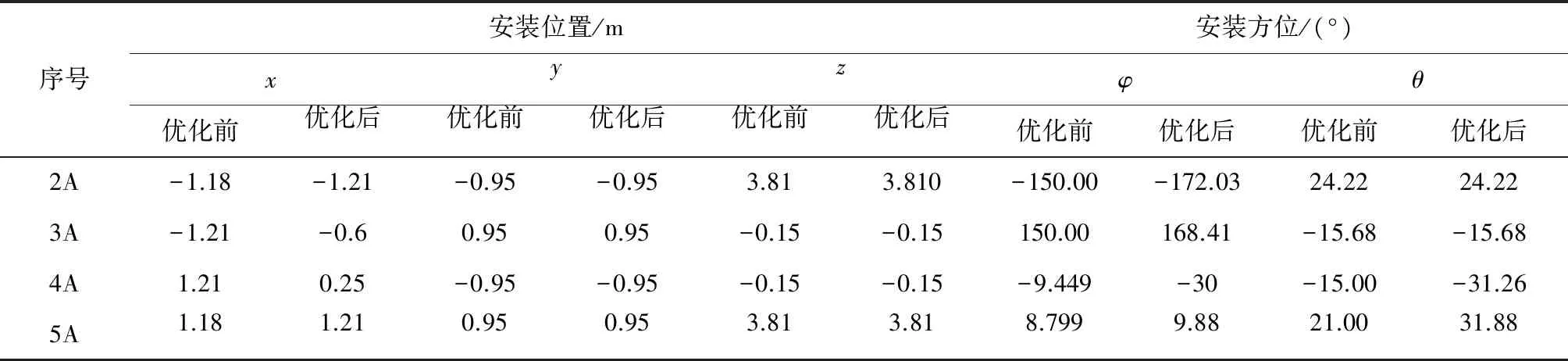
表2 優(yōu)化后的安裝位置和安裝角度

表3 優(yōu)化后的推力器組合產(chǎn)生的推力和力矩
4 結(jié) 論
本文針對一類衛(wèi)星平臺的推力器布局問題進行了優(yōu)化設(shè)計,給出了優(yōu)化設(shè)計原則和優(yōu)化指標,將推力器布局問題描述為一個多目標優(yōu)化問題,通過計算機在可行區(qū)域內(nèi)尋優(yōu),避免了通過人工試湊調(diào)整布局的不足.并基于文中的設(shè)計原則和指標對IntelSat-VII/VIIA衛(wèi)星的推力器布局進行了優(yōu)化設(shè)計,獲得了良好的效果.
[1] David J K,Jonathan C W.SS/L-1300 satellite optimized for land launch[R].AIAA 2006-5302
[2] Hitoshi K.Activities on electric propulsion in Japan-space flight from basic research[C].The 38thAIAA Joint Propulsion Conference and Exhibit,Indianapolis,Indiana,July 7-10,2002
[3] John C H,Peter G.Earth acquisition and attitude recovery for IntelSat VII/VIIA Satellites[C].The 20thAIAA International Communication System Conference and Exhibit,Montreal,Quebec,Canada,May 12-15,2002
[4] 鄒衛(wèi)強,卜質(zhì)瓊.一種基于智能群的快速多目標優(yōu)化算法[J].計算機工程與應(yīng)用,2008,44(6): 59-61
[5] 趙亮,雎剛,呂劍虹.一種改進的遺傳多目標優(yōu)化算法及其應(yīng)用[J].中國電機工程學報,2008,28(2):96-102
[6] Coleman T F,Li Y.An interior,trust region approach for nonlinear minimization subject to bounds [J].SIAM Journal on Optimization,1996,6(2):418-445
[7] Coleman T F,Li Y.On the convergence of reflective Newton methods for large-scale nonlinear minimization subject to bounds [J].Mathematical Programming,1994,67(2): 189-224
AMulti-ObjectiveOptimizationMethodofThrusterConfigurationforaClassofSatellite
LIN Bo1,2,WU Yunli1,2
(1.BejingInstituteofControlEngineering,Beijing100190,China;2.NationalKeyLaboratoryofScienceandTechnologyonSpaceIntelligentControl,Beijing100190,China)
A multi-objective optimization method for thrusters configuration is proposed for a class of satellites.In the paper,several optimization goals and design criterion are given for positioning and orienting thrusters.The position and the orientation of thrusters are achieved by solving the multi-objective optimization problem.Finally,the method is used to achieve positioning and oriening of thrusters for IntelSat-VII/VIIA,the results show the method is valid.
thruster configuration; attitude control; spacecraft; configuration optimization
V448
A
1674-1579(2010)04-0031-05
2010-04-16
林波(1977—),男,云南人,工程師,研究方向為飛行器動力學與控制、魯棒控制(e-mail: lb_less@163.com).
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48
中學生數(shù)理化(高中版.高考數(shù)學)(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
