基于ANSYS的工業(yè)機器人小臂有限元靜態(tài)分析
2010-11-28 04:59:38李偉光劉建華
制造技術(shù)與機床 2010年5期
李偉光 劉建華
(華南理工大學(xué)機械與汽車工程學(xué)院,廣東廣州 510640)
工業(yè)機器人小臂連接大臂和末端執(zhí)行機構(gòu)。直接影響機器人的強度和精度,是機器人的重要部件。因此在設(shè)計過程中必須保證小臂的強度以及剛度符合要求,在結(jié)構(gòu)設(shè)計出來后對其進行強度及剛度分析。以往的結(jié)構(gòu)分析方法往往局限于簡化條件下用解析法求解問題。由于做了過多的簡化,計算模型構(gòu)造得非常簡單,計算結(jié)果往往粗略,與實際情況相差較大[1]。
隨著計算機應(yīng)用技術(shù)的不斷發(fā)展,現(xiàn)已普遍采用有限元分析來解決這類問題[2]。ANSYS軟件含有多種有限元分析能力,包括從簡單線性靜態(tài)分析到復(fù)雜的非線性分析。一個典型的ANSYS分析過程可分為以下3個步驟:創(chuàng)建有限元模型 (輸入/建立幾何模型、定義材料屬性、劃分網(wǎng)格、建立單元特征)、施加載荷并進行求解和結(jié)果后處理等[3]。
本文采用有限元分析軟件ANSYS對機器人小臂進行靜力學(xué)分析,直觀展現(xiàn)結(jié)構(gòu)的應(yīng)力場和位移場。
1 機器人有限元模型
1.1 輸入/建立幾何模型
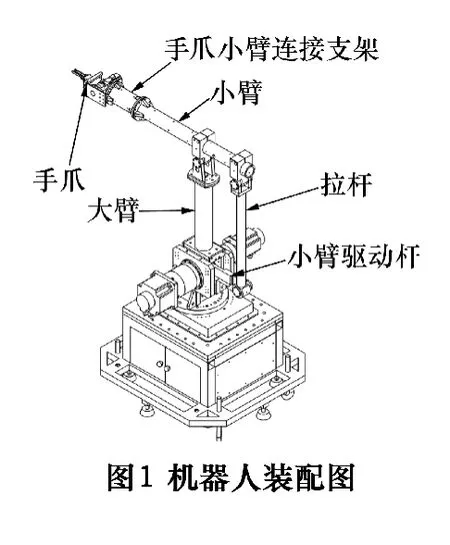
三維建模工業(yè)機器人實體模型如圖1所示。其中大臂安裝在腰部支架上,連接大臂電動機和小臂,承受大臂以上部件負(fù)荷,小臂驅(qū)動桿連接小臂電動機和拉桿,通過拉桿驅(qū)動小臂以及末端執(zhí)行件的運動。小臂安裝在大臂上端,末端連接拉桿,前端連接手爪小臂連接支架。手爪為機器人末端執(zhí)行機構(gòu),通過小臂連接支架與小臂末端相連接。
1.2 定義材料屬性、劃分網(wǎng)格、建立單元特征
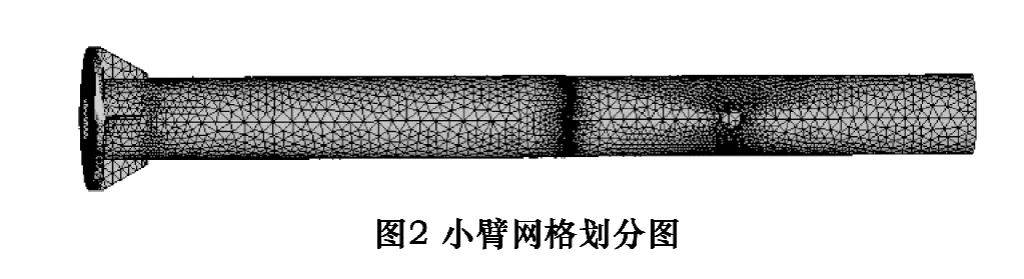
在SolidWorks中將小臂模型中的一些微小特征如倒角等刪除,然后將修改后的模型轉(zhuǎn)換格式導(dǎo)入Ansys。設(shè)置單元類型為SOLID187,小臂材料為硬鋁合金,材料的彈性模量為71 GPa,質(zhì)量密度為2.7×103kg/m3,采用自由網(wǎng)格劃分,利用Smart Size控制生成的網(wǎng)格質(zhì)量,網(wǎng)格劃分完成后共有 76935個單元,133082個節(jié)點,劃分后圖形如圖2所示。
2 施加載荷并且求解
下文對小臂的應(yīng)力及變形進行分析,研究小臂變形對末端手爪的定位精度產(chǎn)生的影響。
機器人在小臂水平、大臂豎直的姿態(tài)下,末端執(zhí)行器因結(jié)構(gòu)變形的位移量最大,因此選擇該姿態(tài)進行研究。計算過程中將小臂延長桿及末端執(zhí)行器看成剛體,機器人負(fù)載取1 kg。該部分所有結(jié)構(gòu)的重力在小臂與小臂延長桿處所產(chǎn)生的載荷為91 N的集中力和23990 Nmm的力矩,小臂的重力為51.6 N,它的作用點與大小臂連接處的距離為79 mm。機器人各部分結(jié)構(gòu)的尺寸及所受載荷簡圖如圖3所示。由機器人整體結(jié)構(gòu)的受力圖,根據(jù)力與力矩平衡
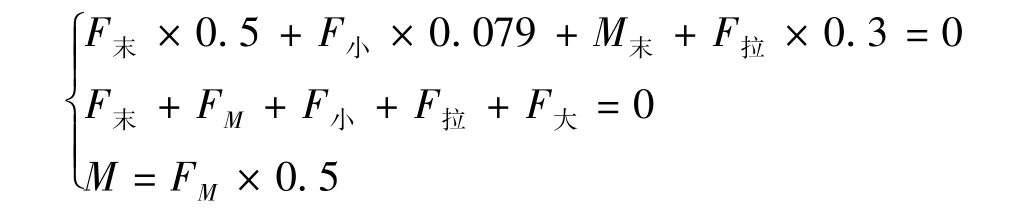
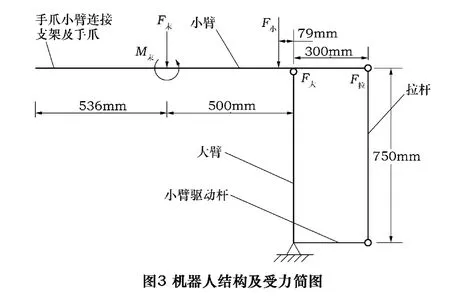
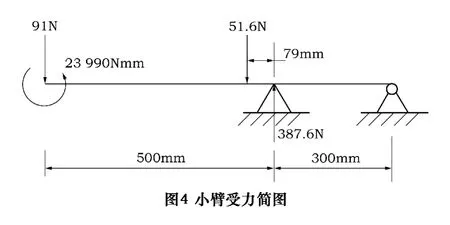
計算可得拉桿與小臂連接處的力為245 N,大臂與小臂連接處的力為387.6 N。因此,小臂的受力簡圖如圖4所示。
3 小臂應(yīng)力分析
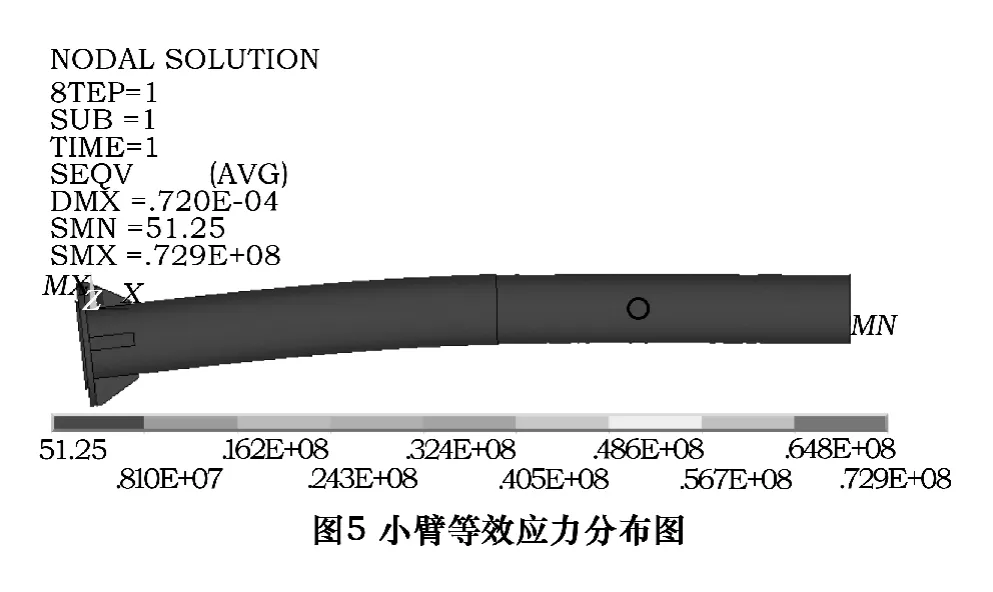
根據(jù)小臂受力簡圖,在相應(yīng)位置施加位移約束與集中力載荷進行分析,其von Mises等效應(yīng)力分布圖如圖5所示。
從圖中可以看出,小臂各部分所受應(yīng)力都比較小,最大應(yīng)力不超過72.9 MPa,遠小于鋁合金材料的屈服極限125 MPa,因此該結(jié)構(gòu)的強度滿足設(shè)計要求。
4 小臂變形分析
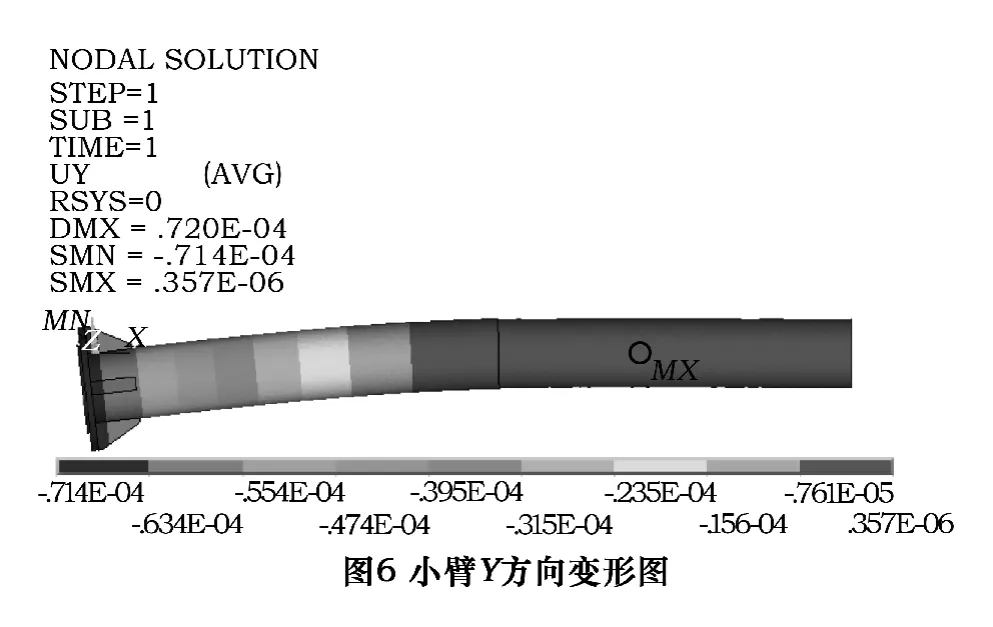
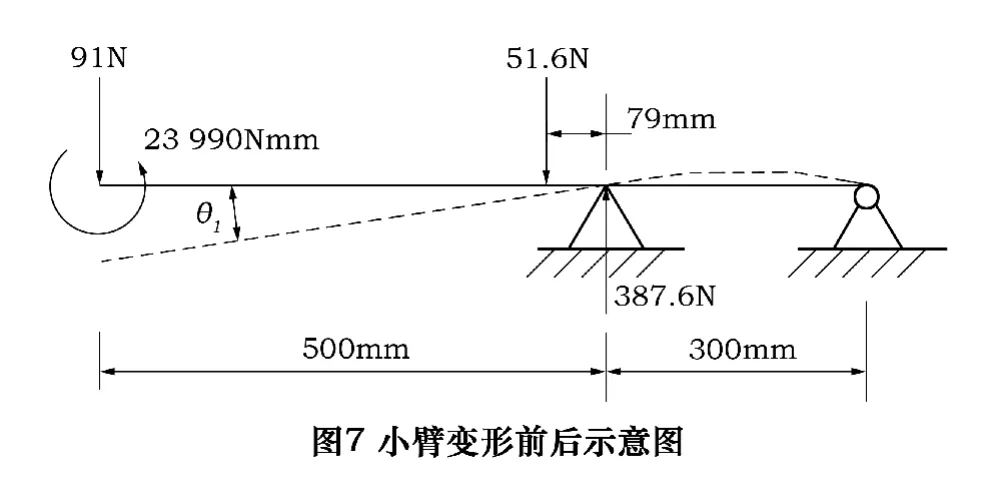
根據(jù)前面載荷以及材料特性可得其變形圖,如下圖6所示。從圖中可以看出,小臂在Y軸方向的最小變形為0.357 μm,最大變形發(fā)生在小臂與手爪小臂連接支架接觸部分附近,其值為72 μm,小臂在變形前后的簡化示意圖如圖7所示。圖中,實線表示小臂變形前位置,虛線表示小臂變形后位置,小臂的變形角度θ1很小,可通過 sinθ1=δ/l進行計算。 式中,δ為小臂在Y軸方向的變形位移,l為變形處沿小臂軸線方向離左端鉸接處的距離,根據(jù)已知可求得小臂末端處的變形角度為0.00825°。因此,機器人手指末端因小臂變形影響在XOY平面繞Y軸的偏移角度也為0.00825°,小于機器人手指在XOY平面繞Y軸的最大偏移角度設(shè)計值0.05°,因此該結(jié)構(gòu)的變形滿足設(shè)計要求。
5 結(jié)語
本文采用有限元法,根據(jù)小臂實際情況,在準(zhǔn)確建立實體模型的基礎(chǔ)上,選擇了合適的單元類型,進行了合理的網(wǎng)格劃分,建立了有限元模型,利用ANSYS軟件進行靜力分析。獲得了小臂的最大節(jié)點等效應(yīng)力、最大結(jié)構(gòu)總變形,直觀展示了小臂的應(yīng)力分布和位移分布。分析結(jié)果表明,小臂的安全系數(shù)較大,強度能滿足工作的要求,其剛度能保證機器人在實際工作情況下獲得足夠的精度。
[1]席思文.氣門電鐓成型工序機器人結(jié)構(gòu)設(shè)計與動力學(xué)仿真分析[D].廣州:華南理工大學(xué),2009.
[2]鐘佩思,孫雪顏,趙丹,等.基于ANSYS的貨車車架的有限元靜態(tài)分析[J].拖拉機與農(nóng)用運輸車,2008(2).
[3]姜鳳鵬.基于ADAMS和ANSYS的貼片機力學(xué)分析與結(jié)構(gòu)優(yōu)化[D].上海:上海交通大學(xué),2008.
猜你喜歡
哲學(xué)評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2020年1期)2020-09-21 09:24:52
中華詩詞(2019年7期)2019-11-25 01:43:04
小學(xué)生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2017年11期)2017-04-23 07:18:00
數(shù)學(xué)大王·中高年級(2016年12期)2016-12-26 21:37:36
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
機械工程師(2015年10期)2015-02-02 01:14:03
機電產(chǎn)品開發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24