MOTOMAN 機(jī)器人逆運(yùn)動(dòng)學(xué)新分析
2010-11-16 08:08:16王其軍杜建軍
哈爾濱工業(yè)大學(xué)學(xué)報(bào) 2010年3期
關(guān)鍵詞:方法
王其軍,杜建軍
(哈爾濱工業(yè)大學(xué) 深圳研究生院,廣東 深圳518055,jjdu@hit.edu.cn)
機(jī)器人現(xiàn)有的逆解求解方法主要有解析法[1-3]、幾何法[4]、符號(hào)及數(shù)值方法[5]及近年出現(xiàn)的神經(jīng)網(wǎng)絡(luò)法[6-8]等.在機(jī)器人逆解過程中,一般在360°范圍內(nèi)計(jì)算機(jī)器人關(guān)節(jié)角度,但文獻(xiàn)[2-3]在解關(guān)節(jié)角時(shí)采用單變量反正切函數(shù),一個(gè)反正切函數(shù)的解可能被丟失.機(jī)器人反解有多解,但控制機(jī)器人只能有一組解,所以必須選取一組解作為最后確定的解,文獻(xiàn)[2-3]中反解存在8 組解,沒有給出怎樣選取一組解作為最后反解的結(jié)果.
針對(duì)以上問題,本文在求關(guān)節(jié)變量時(shí)采用雙變量正切函數(shù),這樣通過自變量的符號(hào)確定關(guān)節(jié)角度所在的象限,避免了解被丟失的可能性,針對(duì)反解多解,采用“最短行程”準(zhǔn)則選取一組最接近于當(dāng)前操作臂的解.
1 機(jī)器人運(yùn)動(dòng)學(xué)模型的建立
機(jī)器人運(yùn)動(dòng)學(xué)傳統(tǒng)的描述方法是基于D-H方法[9],用D-H 法建立了各桿坐標(biāo)系如圖1 所示,第i-1 系和i 系間的關(guān)系可以用坐標(biāo)系的平移和旋轉(zhuǎn)來實(shí)現(xiàn).這種關(guān)系可由表示連桿i 對(duì)連桿i-1 相對(duì)位置的4 個(gè)齊次變換來描述,并叫做矩陣Ai.此關(guān)系式為
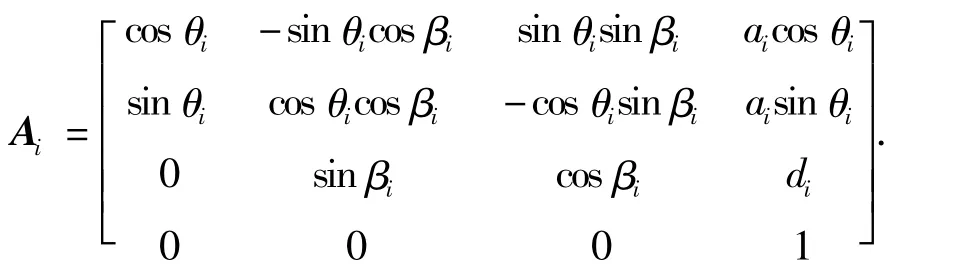
式中:θi為是關(guān)節(jié)i 的旋轉(zhuǎn)角;βi為是關(guān)節(jié)i 和i+1 間的扭轉(zhuǎn)角;ai為是關(guān)節(jié)i+1 的長度;di為是關(guān)節(jié)i 的偏距;i=0,1,2,…,6.
由六自由度機(jī)器人參考坐標(biāo)系圖,得到六自由度機(jī)器人的D-H 參數(shù)表如表1.
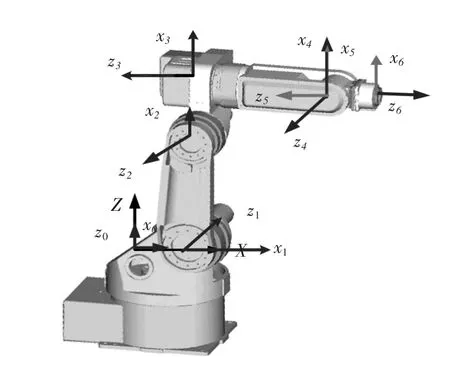
圖1 機(jī)器人D-H 表示法參考坐標(biāo)系
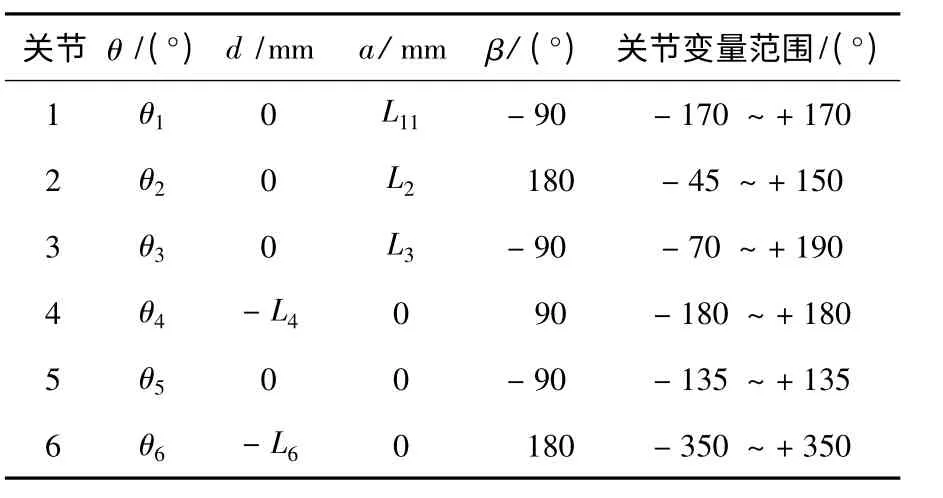
表1 D-H 參數(shù)
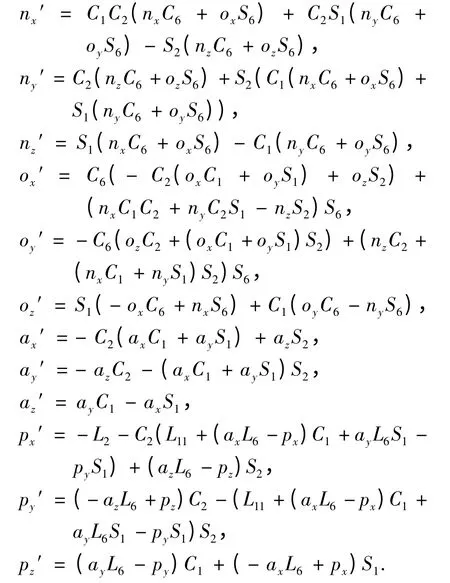
依照D-H 表示方法原理,可以得到坐標(biāo)系X0-Z0到坐標(biāo)系X1-Z1的變化矩陣為A1,同理相鄰坐標(biāo)系間的變化矩陣計(jì)為A2,A3,A4,A5,A6.這6 個(gè)坐標(biāo)變化矩陣的表達(dá)式如下:

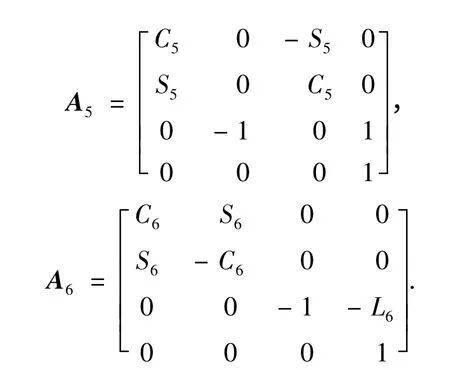
式中:Si=sin θi;Ci=cos θi,則
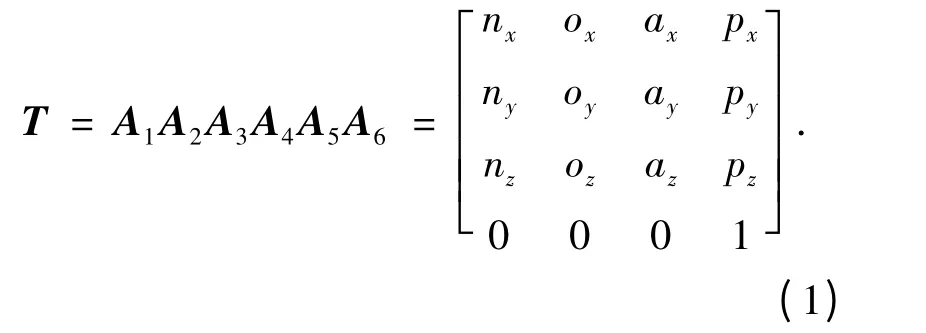
式中:
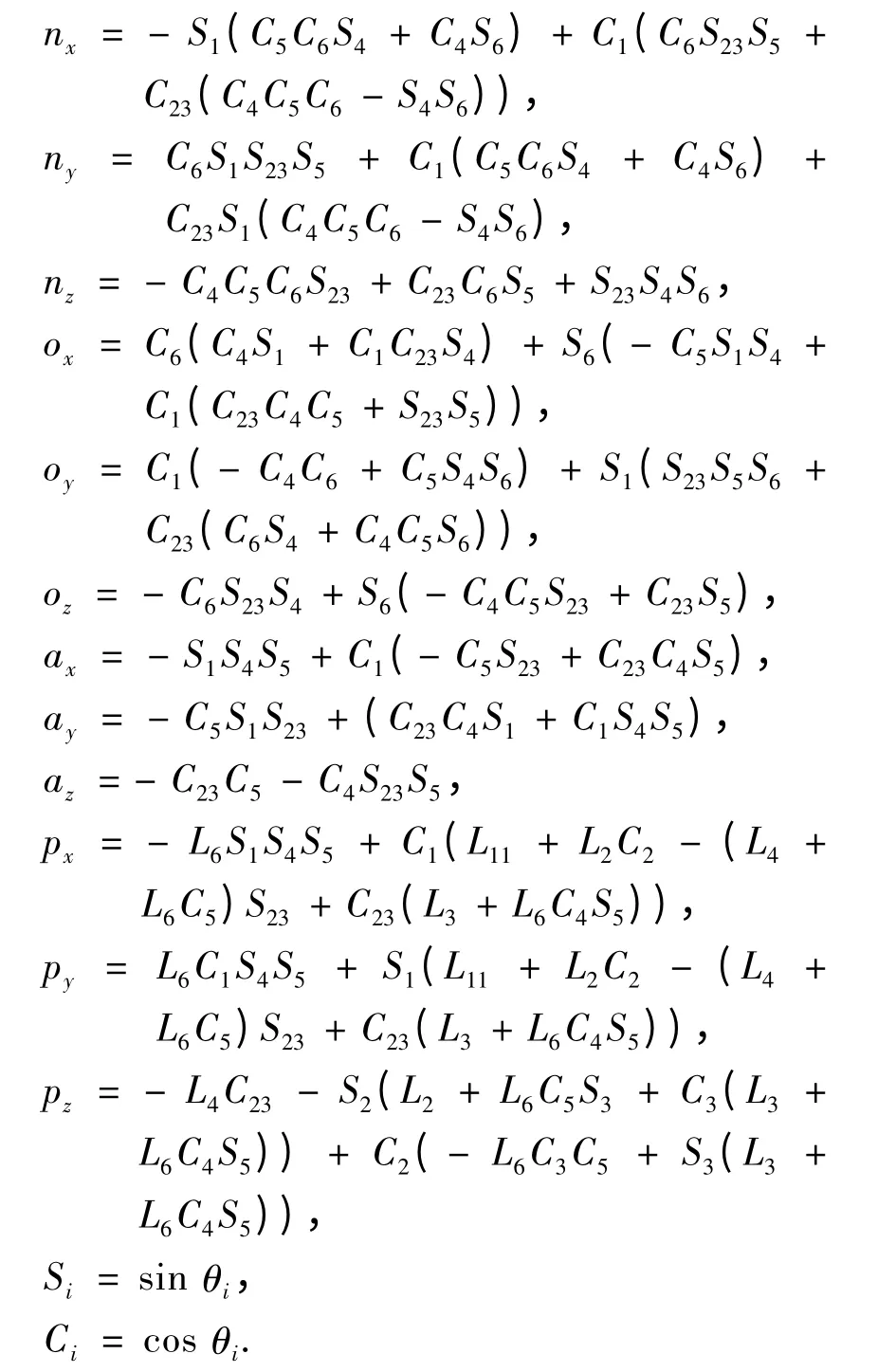
這樣,由T 可以得到機(jī)器人末端的位姿(位置和姿態(tài)).
2 運(yùn)動(dòng)學(xué)反解
逆運(yùn)動(dòng)學(xué)問題是已知機(jī)器人末端執(zhí)行器的位姿,求相應(yīng)的關(guān)節(jié)變量.
將式(1)變形為

式(2)的左邊

式(2)右邊
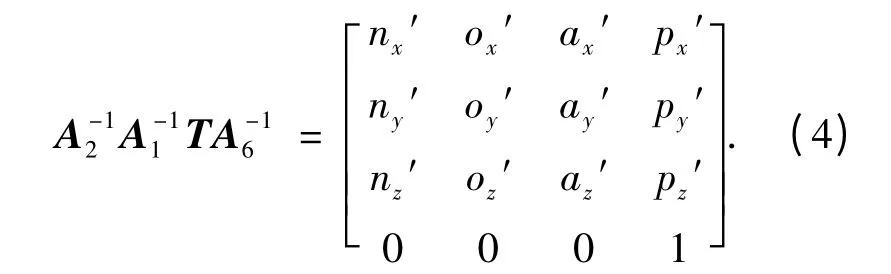
式中:
1)求解θ1.由式(3)與式(4)中的矩陣元素第三行第四列元素相等得到
θ1=Atan2(-ayL6+py,-axL6+px)或
θ1=Atan2(ayL6-py,axL6-px).
2)求解θ2.依據(jù)兩邊矩陣(3),(4)中的第一行第四列元素和第二行第四列元素分別相等得到等式:

令

把u,v 代入式(5)、(6)得到

令

將式(7)與與(8)兩邊平方然后相加化簡(jiǎn)得到

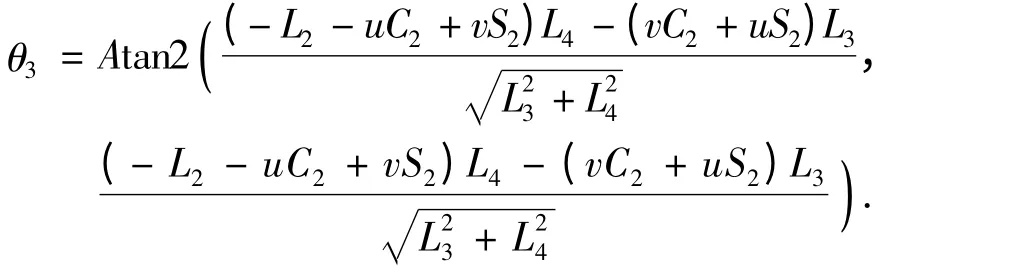
3)求解θ3.式(7)與(8)是關(guān)于S3與C3的方程組.所以可以解得
4)求解θ5.依據(jù)兩邊矩陣(2),(3)中的第一行第三列元素和第二行第三列元素分別相等得到等式:

假設(shè):

式(9)與(10)兩邊分別乘以S3與C3,然后相減,可以得到

5)求解θ4.式(9)與(10)兩邊分別乘以C3與S3,然后相加得到

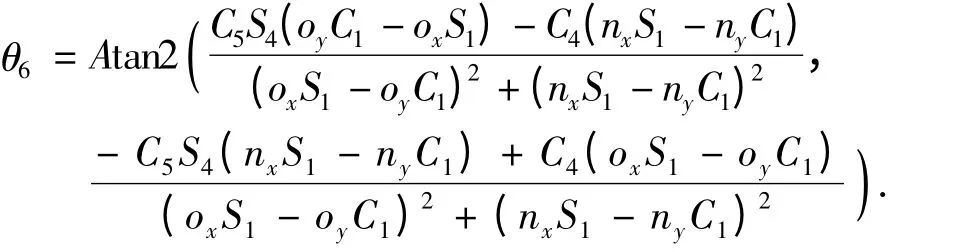
6)求解θ6.依據(jù)兩邊矩陣(2),(3)中的第三行第一列元素和第三行第二列元素分別相等,可以得到
3 運(yùn)動(dòng)學(xué)反解不唯一性
從解的表達(dá)式中可以看到θ1,θ2,θ5分別有兩個(gè)根,所以機(jī)器人有8 組根.在實(shí)際運(yùn)行中,如何從機(jī)器人運(yùn)動(dòng)學(xué)的多組反解中選擇一組合適的解是一個(gè)值得研究的問題.一般地,具有多組反解的機(jī)器人運(yùn)動(dòng)學(xué)問題可以采用優(yōu)化算法來解決,定義一個(gè)優(yōu)化準(zhǔn)則,選擇滿足優(yōu)化準(zhǔn)則的最優(yōu)解作為機(jī)器人運(yùn)動(dòng)學(xué)的確定反解.本文采用“最短行程”準(zhǔn)則選取一組最接近于當(dāng)前操作臂的解.算法流程圖如圖2 所示.
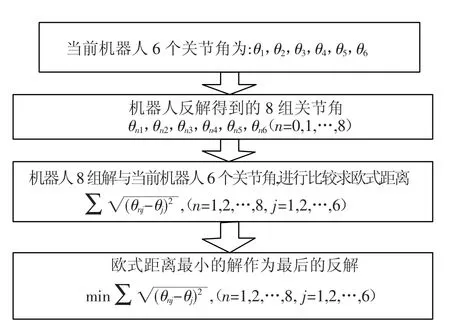
圖2 最短行程準(zhǔn)則流程圖
4 驗(yàn) 證
按照如圖3 所示的具體步驟,利用計(jì)算機(jī)程序進(jìn)行計(jì)算,可以驗(yàn)證運(yùn)動(dòng)學(xué)解的正確性.
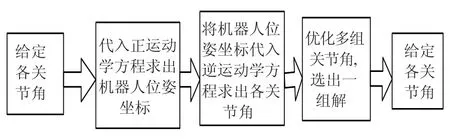
圖3 運(yùn)動(dòng)學(xué)驗(yàn)證流程圖
已知輸入各關(guān)節(jié)角分別為-18.495 4,-37.618 3,-59.786 4,19.860 0,110.967 2,7.364 8,正解得到機(jī)器人位姿為387.217 0,-99.421 0,-104.717 0,180.000 0,-89.999 9,0.
逆解得到的關(guān)節(jié)角為-18.495 3,-37.618 3,-59.786 4,19.859 8,110.967 1,7.364 7.
計(jì)算結(jié)果表明,所得的解完全符合所賦初值.
5 結(jié) 論
2)在機(jī)器人逆解求關(guān)節(jié)角過程中,采用雙變量反正切函數(shù),通過自變量的符號(hào)就可以確定關(guān)節(jié)角度所在的象限,避免了解被丟失的可能性.
3)給出了六自由度機(jī)器人對(duì)應(yīng)某一位姿的8個(gè)位行,采用“最短行程“準(zhǔn)則選取一組最接近于當(dāng)前操作臂的解.
4)本文提出的方法已經(jīng)在深圳市元?jiǎng)?chuàng)興科技有限公司自主研發(fā)的工業(yè)六自由度機(jī)器人中成功應(yīng)用.
[1]PAUL R P,SHIMANO B E,MAYER G.Kinematic control equations for simple manipulations[J].IEEE Trans SMC,1981,11(6):449-455.
[2]王雪松,許世范,郝繼飛.MOTOMAN 機(jī)械手運(yùn)動(dòng)方程新的推導(dǎo)方法及求解[J].中國礦業(yè)大學(xué)學(xué)報(bào),2001,30(1):73-76.
[3]王奇志,徐心和.PUMA 機(jī)械手逆運(yùn)動(dòng)方程新的推導(dǎo)方法及求解.機(jī)器人.1998,20(2):81-87.
[4]FU K S,GONZALEZ R C,LEE C S G.Robotics Control Sensins Vision and Intelligence[M].New York:McGrawHill,1987:78-82.
[5]MANOCHA D,CANNY J F.Efficient inverse kinematics for general 6R manipulators[J].IEEE Transactions on Robotics and Automation,1994,10(5):648-657.
[6]KARLIK B,AYDIN S.An improved approach to the solution of inverse kinematics problems for robot manipulators[J].Engineering Applications of Artificial Intelligence,2000(13):159-164.
[7]陳學(xué)生,陳在禮,謝濤.基于神經(jīng)網(wǎng)絡(luò)的機(jī)器人操作手IKP 精確求解[J].機(jī)器人,2002,24(2):130-133.
[8]MAYROGA R V,SANONGBOOM.A radial basis function network approach for geometrically bounded manipulator inverse kinematics computation[J]//2003 IEEE/RSJ International Conference on Intelligent robots and system,2003,4(12):3564-3569.
[9]DENAVIT J,HARTENBERG R S.A kinematic notation for lower-pair mechanisms based on matrices[J].ASM Journal of Applied Mechanics,1955,22(2):215-221.
[10]TAROKH M,KIM M.Inverse Kinematics of 7-DOF Robots and Limbs by Decomposition and Approximation[J].IEEE Transaction on Robotics,2007,23(3):6-11.
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(bào)(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56