城市軌道交通工程精密施工測量技術的應用與研究
2010-09-28 01:19:06馬全明
測繪通報 2010年11期
馬全明
(北京城建勘測設計研究院有限責任公司,北京100101)
城市軌道交通工程精密施工測量技術的應用與研究
馬全明
(北京城建勘測設計研究院有限責任公司,北京100101)
以多年城市軌道交通工程建設的實際測量作業為背景,通過分析、研究與總結,從城市軌道交通工程測量精度設計的主要原則和要求、地面控制測量技術方法、豎井聯系測量技術方法、隧道施工控制測量及貫通測量技術方法四個部分,論述軌道交通工程施工測量的精度要求及主要測量的手段和方法。
城市軌道交通;GPS;精密導線;聯系測量;貫通測量
一、引 言
近年來北京、上海、廣州、重慶等大城市軌道交通線路的相繼建成通車,不僅標志著建設者施工技術的創新和進步,而且從眾多側面和角度充分展示出精密施工測量技術在保障施工精度和速度方面發揮了重要的作用。
城市軌道交通是城市公共交通的一種形式,是包括地下、地面和高架三種方式的軌道工程體系。由于其在建筑物、構筑物稠密和地下管網繁多的城市環境中建設,不僅工程測量精度要求高、技術密集,而且在工程測量方面有其特殊方法和要求。這就對測量工作提出了較高的要求。為使測量技術更好地為城市軌道交通工程建設服務,本文以北京、廣州、天津等地鐵工程建設的實際測量作業為背景,通過分析、研究與總結,從城市軌道交通工程測量精度設計的主要原則和要求、地面控制測量技術方法、豎井聯系測量技術方法、隧道施工控制測量及貫通測量技術方法四個部分進行分析和闡述。
二、城市軌道交通工程測量精度設計的主要原則和要求
城市軌道交通工程的測量精度設計是根據其線路的特征、施工方法、施工精度、設備安裝精度和貫通距離等諸多因素確定的,它不僅要保證隧道和線路貫通,而且要滿足線路定線和放樣,軌道鋪設及設備安裝的精度要求。
城市軌道交通工程測量的一項主要任務是保證其隧道貫通,其貫通誤差的大小將直接影響到工程鐵建設質量和工程造價。因此,在城市軌道交通工程測量精度設計中,合理地規定隧道貫通誤差及其允許值,是城市軌道交通工程測量的一項重要研究任務。目前在《城市軌道交通工程測量規范》(GB 50308—2008)中規定隧道橫向貫通中誤差在±50 mm之內,高程貫通中誤差在±25 mm之內,該指標主要應用在采用盾構和噴錨構筑法進行的隧道施工中。
1.城市軌道交通工程平面貫通測量誤差
精度指標的確定
城市軌道交通工程平面貫通測量誤差是根據設計所給定的限界裕量(安全空隙)和隧道結構聯結處的允許偏差兩個主要因素以及測量儀器設備的精度狀況來確定的。設計中一般給定的隧道結構限界裕量每側為100 mm(式(1)中用M表示),這100 mm的限界裕量中主要包括施工誤差、測量誤差、變形誤差等。《地下鐵道工程施工及驗收規范》(GB 50299—1999)規定采用噴錨暗挖施工時,初期支護鋼筋格柵安裝允許誤差為±30 mm(式(1)中用M1表示),噴射混凝土平整度允許隧道橫向偏差為±30 mm(式(1)中用M2表示),變形允許誤差為±20 mm(式(1)用M3表示),則由式(1)計算出采用該施工方法時貫通測量誤差的允許值M4=±88.3 mm。

該值為極限誤差,如以極限誤差為2倍中誤差M4來計算,則橫向貫通測量中誤差M4=±44.2 mm。
根據上述貫通誤差制定的原則,并考慮各測量環節實際容易達到的精度情況,參照軌道交通貫通測量實踐采用不等精度分配方法,將貫通誤差配賦到軌道交通平面測量的主要環節。其中,地面控制測量中誤差為 ±25 mm;豎井聯系測量中誤差為±20 mm;地下控制導線測量中誤差為±30 mm。則隧道橫向貫通中誤差為±43.8 mm<±44.2 mm。
2.城市軌道交通工程高程貫通測量誤差精度指標的確定
城市軌道交通工程設計所給定的的高程安全裕量比較大,一般為70~100 mm,因此根據目前測量儀器和設備狀況以及隧道結構的豎向允許偏差,土建施工比較容易滿足貫通誤差設計要求。但考慮到城市軌道交通工程采用整體道床鋪軌對高程精度的要求,地鐵高程貫通測量誤差確定為±25mm。同樣采用不等精度分配方法,將高程貫通測量誤差分配到高程測量的各個環節。其中,地面高程控制測量中誤差為±16 mm;高程傳遞測量中誤差為±10 mm;地下高程測量中誤差為±16 mm。則高程貫通測量中誤差Mh=±24.7 mm<±25 mm。
上述確定的城市軌道交通工程貫通測量誤差要求經我國北京、上海及廣州等城市各條軌道交通線路貫通測量的實踐驗證是比較切合實際的。
三、城市軌道交通工程地面控制測量技術方法
1.城市軌道交通工程首級GPS控制網測量技術方法
隨著城市經濟建設的發展,城市軌道交通必然逐步形成縱橫交錯的地上、地下網絡系統。原來各城市建造的地面三角控制網,由于城市建設的迅猛發展,三角點大部分已破壞,現存的個別點也不能通視,給地鐵建設的測量工作帶來困難。而GPS技術則為城市軌道交通工程控制網測量提供了更好的選擇。
1990年在北京地鐵復八線地面控制網測量中首次應用了GPS技術。該控制網由10個GPS控制點組成,布網選點時要求各個控制點不僅要滿足地鐵復八線工程設計和施工要求,還要盡量與原有北京市I等三角網的高級控制點相聯系,以便檢核并評定1965年I等三角網點的穩定情況。布設的GPS控制網形式如圖1所示。
外業觀測采用W101接收機,觀測前利用GPS軟件算出測區上空衛星的可見性、高度、方位角、PDOP值。為了削弱電離層的影響,選擇PDOP<5的最佳觀測窗。每時段觀測2 h,以確保數據篩選后仍有60 min的有效數據可用于計算。

圖1 北京地鐵復八線控制網GPS控制點分布示意圖
內業數據采用POPS202版軟件進行處理。在計算中采用自動篩選和人工篩選相結合的辦法消除有周跳的觀測數據,經平差計后異步環閉合差為(1.73~2.89)×10-6,邊長中誤差為±2.1 mm,點位中誤差為±3.5 mm。
1994年由于城市建設的影響,原有GPS控制點有的被破壞,有的發生變形,需要對原控制網進行擴充,并對原控制點的穩定性進行評價。為此在原GPS控制網的基礎上新網共選設了13個點,7個點為舊點,新增6個點,其中3個點為一等點,新網布設形式如圖2所示。

圖2 新網布設示意圖
考慮到地鐵測量誤差分配到GPS測量的誤差精度要求(相鄰點位中誤差小于±10 mm),為加強控制網整體強度,采用“一次布設、兩級觀測、整體平差”的原則設計和布設GPS網。一級網由兩個重疊的大地四邊形組成,二級網為一級網下加密的三角鎖。
GPS網采用Trimble 4000SSE雙頻接收機進行觀測,一級網共觀測5個時段,二級加密網共觀測11個時段,每時段觀測60 min。重復測站數R= 3.7,網的可靠性指標η=0.625。外業觀測結果:同步環16個,平均閉合差為0.44×10-6,最大閉合差為1.26×10-6,最小閉合差為0.07×10-6,絕大部分均小于0.5×10-6。異步環36個,最大閉合差為2.83×10-6,最小閉合差為0.06×10-6,大部分均小于1×10-6。全網共計31條邊,其中復測邊占45%,平均互差值為4.4 mm。
內業平差時選定以2個已知點為固定點,以一級網下加密三角鎖的網型方案進行平差,平差后點位中誤差為±3.2 mm,方位角中誤差為±0.23″,邊長中誤差為±2.3 mm。同時通過對不同網型方案的平差方法的分析,發現在一級網下加密導線的方案以較小的工作量同樣可以得到較高的測量精度。
北京地鐵復八線GPS控制網測量的成功經驗,為以后的城市軌道交通工程GPS控制網測量奠定了基礎。此后北京、廣州、青島、天津等城市的軌道交通工程控制網測量均采用了GPS測量技術。當今伴隨著電子和通信技術的迅猛發展,GPS測量技術也在不斷地創新和完善,不僅觀測成果精度高,而且投入也少,大大地提高了生產效率,取得了良好的效果。
2.城市軌道交通工程精密導線網測量
技術方法
城市軌道交通工程精密導線網是為其工程線路區間隧道設計、施工而建立的平面控制導線。它附合在GPS控制網中,導線一般沿軌道交通線路布設成直伸形,附合長度在3~4 km,平均邊長控制在350 m左右。圖3為北京地鐵某區段精密導線點布設示意圖。

圖3 北京地鐵某區段精密導線點布設示意圖
該段精密導線點的設置除按一般選點條件考慮外,為提高角度和邊長的傳算精度,采用了增加導線輔點的方法增強圖形強度。導線點標石為人工混凝土結構,標石底部埋設在凍土層以下(即1.2 m以下),標石中心為鑲有直徑1 mm銅芯的不銹鋼標志。標石埋設后穩定一個月才進行觀測。
導線采用TCA 2003全站儀施測,水平角觀測四測回(分左、右角觀測),邊長往返觀測四測回,每測回三次讀數。為提高觀測精度,照準目標選用高精度專用覘牌,觀測中覘牌和儀器兩次對中;水平角觀測遇到長、短邊需要調焦時,采用“盤左長邊調焦,盤右長邊不調焦,盤右短邊調焦,盤左短邊不調焦”的觀測順序進行觀測,消除了多次調焦對觀測的影響;測前對使用的儀器和設備進行全面檢核。由于采用上述措施,盡管導線較長、測站較多,仍取得測角中誤差Mβ=±0.9″,導線全長相對誤差為1/14萬的高精度成果,為下一步豎井聯系測量和地下控制導線測量工作奠定了良好的基礎。
3.城市軌道交通工程精密水準網測量
技術方法
由于受城市軌道交通工程施工中降水和施工等因素影響,易造成水準點變化,精密水準點一般選在軌道交通工程線路中線兩側40 m以外,遠離地表變形區,水準點以墻上標志為主,埋設在年代較長的永久建筑物上。圖4為北京地鐵某區段精密水準路線布設圖。

圖4 北京地鐵某區段精密水準路線布設示意圖
該段精密水準路線起算于I京良2、I京良3和I京西2三個北京市I等水準點,由9個水準點組成,水準路線全長4.6 km。水準測量采用NA2+ GPM3自動安平水準儀和因鋼水準尺,按Ⅱ等水準測量的方法和水準路線閉合差小于±8■L mm(L為水準路線長,以km計)的精度要求進行施測。其往返閉合差<±3 mm,平差后每km高程偶然中誤差<±1 mm。滿足了城市軌道交通工程地面高程控制測量的精度要求。
四、城市軌道交通工程豎井聯系測量技術方法
由于城市軌道交通工程車站和隧道大多采用暗挖法施工,為了保證地下隧道各工作面按設計位置正確施工,必須把地面控制點的坐標和高程經由豎井傳到地下。通過這一豎井聯系測量工作使地下建立起與地面統一的坐標和高程系統,指導地下隧道施工作業。
1.豎井定向測量方法
常規定向工作大多采用懸吊鋼絲的聯系三角形法,不僅對三角形圖形幾何條件要求高、工作時間長、勞動強度大,而且由于豎井風流等外界因素影響,定向精度很難達到。
為提高定向測量精度,縮短定向時間,在城市軌道交通工程測量實踐中經分析和研究后,決定采用“全站儀+投點儀+陀螺經緯儀”組成的定向測量系統來完成豎井聯系測量工作。其工作原理如圖5所示。
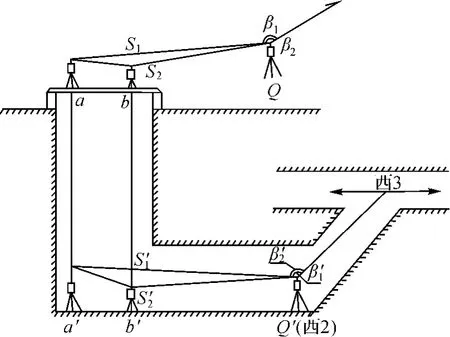
圖5 豎井定向測量工作原理示意圖
該定向測量系統具體工作方法如下:
1)將兩臺NL1/20萬自動安平投點儀分別安置在豎井井架a、b兩點上,并分別精確和井下a'、b'兩點對中。
2)在地面將全站儀TCA 2003安置在近井點Q點上,通過觀測角度β1、β2和邊長S1、S2分別測定a、b兩點坐標。由于a和a',b和b'分別位于同一鉛垂線上,因此它們的兩組坐標一致,亦即將a、b坐標傳到井下a'、b'上。
3)在井下將GAK 1陀螺經緯儀安置在“西2”點上,采用逆轉點法三個測回分別單獨測定陀螺方位α1(a'—西2)、α2(b'—西2),然后取下GAK 1陀螺經緯儀,再在“西2”點上安置全站儀TCA 2003,觀測β1'、β2'以及S1'、S2',從而確定“西2”點的坐標和西2—西3邊方位角,定向工作完畢。
此外為提高定向精度和成果的可靠性,在定向工作的前、后都在緊靠豎井的精密導線邊上進行陀螺常數測定;在一個測回陀螺定向的前、后都進行陀螺經緯儀零位測定。
在豎井定向測量中,由“全站儀+投點儀+陀螺經緯儀”組成的聯合作業方法擺脫了傳統懸吊鋼絲的聯系三角形法,不僅克服了受現場施工場地條件制約圖形強度不易提高、測量工作占用豎井時間長等缺點,而且采用雙投點、雙定向的方法,增加了測量檢核條件,有效地提高了測量定向精度。
2.高程傳遞測量技術方法
通過豎井傳遞高程,是將豎井附近的近井水準點的高程,通過豎井傳遞到井下高程測量起始點上。通過豎井傳遞高程的方法如圖6所示。
在地面建立一懸掛鋼尺尺架,將檢定過的鋼尺懸掛其上,下放到井下,并掛上10 kg重的工作垂球。井上、井下安置兩臺水準儀,同時觀測近井水準點BM上、BM下的水準尺和鋼尺并讀數,通過鋼尺將地面近井水準點 BM上的標高傳到井下水準點BM下。

圖6 豎井高程傳遞測量工作示意圖
水準測量時井上、井下同時測定溫度。為防止出現粗差和提高觀測精度,三次變更儀器高進行觀測,測定井上、井下水準點高差的不符值(高差的不符值<±3 mm)。
在水準測量數據處理時,對觀測值進行溫度、拉力、鋼尺自重等項改正,取三次觀測成果平均值,得到高精度井下水準點(BM下)的高程成果。
五、隧道施工控制測量及貫通測量的技術方法
城市軌道交通工程測量最主要的任務在于確保地下隧道在預定誤差范圍內的正確貫通。隧道施工控制測量是在隧道內建立起一套平面和高程測量控制網,其用途在于放樣隧道的中線位置,指示隧道掘進的方向,以及放樣施工中各設施的位置等。
1.隧道平面施工控制測量技術方法
1)以豎井定向測設的基線邊的坐標和方位角為起算依據,觀測采用Ⅰ級全站儀進行測量,測角四測回(左、右角各兩測回,左、右角平均值之和與360°的較差應小于4″);測邊往返觀測各兩測回。施工控制網最遠點相對于起始點的橫向中誤差小于±25 mm。
2)隧道內控制點設置有多種形式。根據施工方法和隧道結構形狀確定,可埋設在隧道底板的線路中線上,采用鋼板在上面鉆2 mm小孔鑲銅絲作為點的標志;也可埋設在線路中線一側結構邊墻上,安裝放置儀器的強制對中支架。
由于在隧道貫通前的地下控制是一條支導線,這條導線起著指示隧道掘進方向的作用,所以它必須是十分準確的。為提高地下控制測量精度,常采用布設交叉導線和雙導線的形式,在每設置一個新的導線點時,均由兩條導線測得其坐標,當檢核無誤后,取其平均值作為新點的測量數據。另外由于地下施工場地為一個不穩定的載體,測量控制點埋設在上面其穩定性必然受到影響,為保證測量成果的可靠,隨著導線的延伸必須進行重復測量。
2.隧道高程施工控制測量技術方法
1)洞內水準測量以豎井高程傳遞到井下的水準點為起算依據,采用二等精密水準測量方法和水準路線閉合差小于 ±mm的精度要求進行施測。
2)地下水準點可與導線設在一起,在設置導線點的鋼板上焊一突出的金屬標志,作為水準點,也可以在邊墻上設置水準點。
3.隧道貫通誤差測量技術方法
暗挖隧道貫通后及時進行貫通誤差測量,以證實所有測量工作是否滿足精度要求,地鐵隧道是否按設計準確就位,貫通測量包括縱、橫向貫通誤差測量和高程貫通誤差測量。
1)隧道的縱、橫向貫通誤差可根據隧道兩側控制導線點,相向測定貫通面上同一點的坐標閉合差確定,實測的坐標閉合差分別投影到線路和線路的法線方向上,計算縱、橫向貫通誤差值。
2)隧道高程貫通誤差應由兩側控制水準點測定貫通面附近同一水準點的高程差值確定。
六、結束語
隨著測繪科學技術的迅速發展,城市軌道交通工程測量技術也在不斷地創新和進步。GPS控制測量技術、智能化全站儀(測量機器人)、高精度的電子水準儀、激光投點儀、自動定向陀螺儀、三維激光掃描儀以及全站儀與計算機組合斷面測量和數據處理系統、施工變形測量和監控量測自動化系統等在全國軌道交通工程測量中都得到了應用和發展。今后隨著城市軌道交通事業的發展,服務于軌道交通工程建設的工程測量工作,必將從理論和實踐上進一步完善和發展,工程測量新技術、新方法也將在軌道交通工程測量中得到更廣泛的應用。
[1] 秦長利.淺談地下鐵道工程測量工作的現狀和展望[J].鐵路航測,1998(4):30-34.
[2] 潘國榮,王穗輝.地鐵盾構施工中的若干測量手段及方法[J].測繪通報,2001(1):23-25.
[3] 北京城建勘測設計研究院有限責任公司.GB 50308—2008城市軌道交通工程測量規范[S].北京:中國建筑工業出版社,2008.
[4] 北京城建集團有限責任公司.GB 50299—1999地下鐵道工程施工及驗收規范[S].北京:中國計劃出版社,
1999.
Precise Construction Survey Technique for Urban Rail Communication Project:Application and Development
MA Quanming
0494-0911(2010)11-0041-05
P258
B
2010-07-01
馬全明(1964—),男,山西新絳人,教授級高工,主要從事城市軌道交通工程測量及大型精密工程測量工作。
猜你喜歡
建材發展導向(2021年9期)2021-07-16 07:11:36
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
太空探索(2016年6期)2016-07-10 12:09:06
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
中國房地產業(2016年2期)2016-03-01 01:25:48
河南電力(2016年5期)2016-02-06 02:11:34
筑路機械與施工機械化(2015年11期)2015-07-01 16:28:43
筑路機械與施工機械化(2015年8期)2015-01-11 09:24:54
