一種同播發射機的基準頻率源設計
2010-09-27 05:57:52
電訊技術 2010年4期
(成都信息工程學院,成都 610225)
1 引 言
無線同頻同播系統是在一個區域內建立多個同頻中轉臺,并利用鏈路將這些中轉臺連接起來,每個中轉臺負責一定范圍的覆蓋。這樣,利用多個同頻中轉臺和鏈路就可完成大范圍同播覆蓋的目的。無線同頻同播系統以其占用頻率少、覆蓋范圍大、投資低、建網快等特點,近幾年來在公安、消防、城市應急聯動等專業無線通信網中得到了廣泛應用。但是,這種組網形式不可避免地會引起同頻干擾。為了有效抑制同頻干擾,必須使各中轉臺發射機的載頻頻率穩定度達到1×10-8(一級頻率標準),并采用話音判選、話音延遲處理等技術,確保中轉臺轉發信號的載頻精度、頻率偏移、音頻參數等滿足抑制同頻干擾的要求。為了滿足載頻精度和頻率偏移的要求,同播發射機的基準頻率源通常可采用恒溫晶體振蕩器(OCXO)(在-20℃~+70℃溫度范圍內,長期頻率穩定度為5×10-9)、銣原子振蕩器(3×10-10)、全球衛星定位系統(GPS)(5×10-10)等[1]。采用OCXO雖然也能滿足同播發射機頻率穩定度的要求,但要進一步提高指標存在一定技術難度。而高指標的原子鐘因成本和國外禁運等原因尚不能夠普遍運用,采用GPS定時信號來實現高穩定度的基準頻率源無疑是一個很好的途徑。
目前,國內外應用GPS時鐘作時間、頻率同步信號的領域有很多,但針對同播系統的應用還很少。本文針對普通調頻FM制式的發射機,根據數字鎖相原理,提出了一種利用 GPS 秒時鐘來修正晶體振蕩器頻率,獲得高穩定度基準頻率源,從而將普通FM制式的發射機升級為同播發射機的方法。
2 GPS秒時鐘和數字鎖相環
全球衛星定位系統(GPS)是一個覆蓋全球的導航、授時和定位系統,每顆GPS衛星上都裝備有星載原子鐘,各監測站和主控站也都裝備有高性能的銫原子鐘組。主控站上的主鐘又與USNO(United States Naval Observatory)的主鐘之間始終保持精密的同步。因此,GPS時間基準具備非常良好的頻率準確度和長期穩定度,GPS時鐘已成為世界上傳播范圍最廣、精度最高的時間發布系統之一[2-3]。但是,美國對民用用戶不承擔責任,不保證民用GPS 時鐘的精度和可靠性。而且,由于民用 GPS 接收機接收到的GPS 時鐘因星歷誤差、衛星鐘差、電離層誤差、對流層誤差、多徑誤差、接收機誤差、跟蹤衛星過少等因素的影響,秒脈沖前沿跳動較大,短期穩定度難以得到保證,如在衛星失鎖或衛星時鐘實驗跳變的條件下,GPS 時鐘誤差達幾十甚至上百毫秒[4]。通常,該指標由接收機生產廠家給出,并且不同廠家的接收機定時性能可能會有差異。通過對不同廠家的GPS接收機的秒脈沖定時信號實測表明,GPS秒脈沖誤差呈鋸齒狀,短期內有跳變,一般在±1 μs以內,對應的頻率穩定度或定時誤差一般在10-7量級;但長期看并無漂移,長時間的平均值在0值附近[5]。
與GPS時鐘相比,原子鐘、晶振時鐘等短期穩定性較高,單個時間間隔的漂移非常小,但長時間運行的累計誤差較大[6-7],而GPS秒時鐘的累計誤差較小,所以可以參考GPS秒時鐘對晶振時鐘的累計誤差進行修正。
數字鎖相環組成框圖如圖1所示,它由數字鑒相器、環路濾波器和壓控振蕩器3個電路部件組成[8]。數字鎖相環的主要作用是實現輸出與輸入信號之間嚴格的相位同步,當環路進入鎖定狀態時,壓控振蕩器輸出信號u2與環路的輸入信號u1(參考信號)之間便保持極小的相位差,而沒有頻差存在,即輸出信號與輸入信號的頻率一致,其頻率穩定度也一致。本文借鑒這一原理來實現高穩定度頻率源,用GPS秒脈沖作為參考信號,電壓控制晶體振蕩器(VCXO)作為壓控振蕩器,既能保持晶體振蕩器較小的隨機誤差,又能消除晶體振蕩器的累計誤差,從而獲得與GPS秒脈沖相同穩定度的信號。
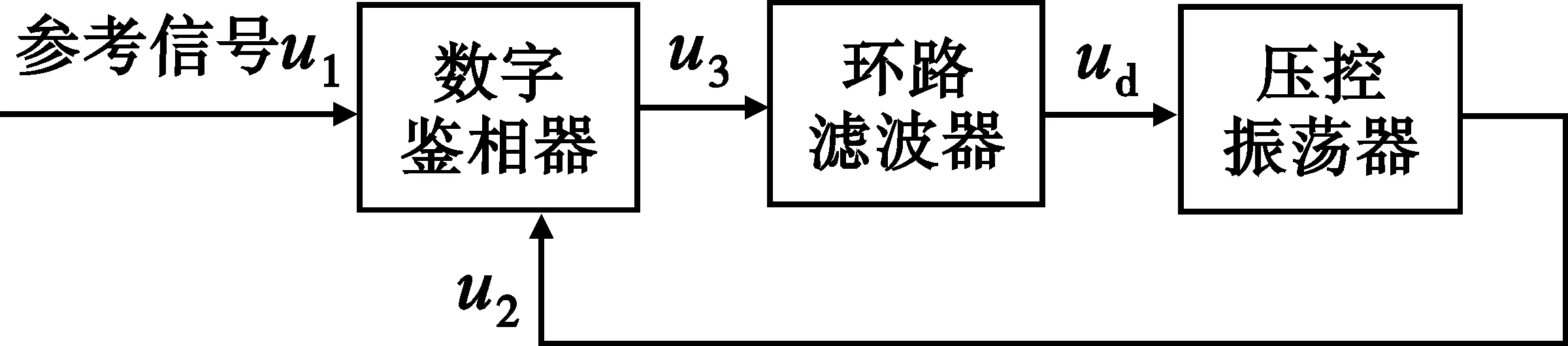
圖1 數字鎖相環一般組成Fig.1 The general structure of digital phase-locked loop
3 高穩定度基準頻率源的組成與工作原理
一般FM發射機的信號源采用“TCXO+PLL”形式,其頻率穩定度在±5×10-6左右,顯然滿足不了同播發射機1×10-8的要求。要將普通的FM發射機用作同播發射機,只需將FM發射機中的TCXO用本文提出的高穩定度基準頻率源替代即可。
3.1 設備組成
高精度基準頻率源在設計上采用“GPS+DPLL”的方案,其組成包括GPS 接收機、微處理器、數字鑒相器、12 MHz的VCXO、D/A轉換器、分頻器、環路濾波器等。設備組成框圖如圖2所示。
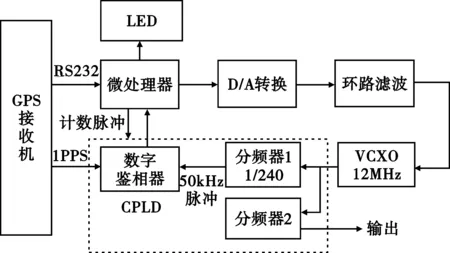
圖2 高穩定度基準頻率源的組成圖Fig.2 Composition of high-stability reference frequency source
GPS 接收機采用美國Rockwell公司的Jupiter GPS OEM板,該OEM板內部帶有平滑處理軟件和專用算法,其靜態漂移為零,秒脈沖精度為30~100 ns;微處理器采用美國STC公司的高速STC12C5A60S2單片機;數字鑒相器和分頻器用Altera公司的CPLD-EPM7128實現;D/A轉換器采用美國Maxim公司的電壓輸出12位串行數據數模轉換器MAX531; 環路濾波器采用三階RC低通濾波器;VCXO采用Kinseki公司的KSS 12 MHz 壓控晶體振蕩器,其長期頻率穩定度為±1×10-7,短期頻率穩定度為±1×10-9;LED由4個發光二極管(LED)構成,在微處理器的控制下,分別指示GPS、DPLL的鎖定狀態以及DPLL在鎖定過程中頻率的遞增和遞減狀態。
3.2 工作原理
在開啟GPS接收機前,調節VCXO的自由振蕩頻率為12 MHz±5 Hz,以確保環路在開啟時能快速、準確地鎖定在12 MHz。GPS接收機接收衛星信號并經處理后,產生秒脈沖信號(1 PPS)以及接收天線位置坐標、時間、衛星狀態和GPS 接收機的狀態等信息,并從串口輸出至微處理器串口。微處理器根據接收的GPS信息,確定GPS接收機是否正常工作,通常以GPS接收機鎖定的衛星數大于3顆為正常工作。
初,呂夷簡罷相,夏竦授樞密使,復奪之,代以杜衍,同時進用富弼、韓琦、范仲淹在二府,歐陽修等為諫官。石介作慶歷圣德詩,言進賢退奸之不易。奸,蓋斥夏竦也,竦銜之。而仲淹等皆修素所厚善,修言事一意徑行,略不以形跡嫌疑顧避。竦因與其黨造為黨論,目衍、仲淹及修為黨人。[1]3580
在GPS接收機正常工作狀態下,微處理器指示鎖相環工作于跟蹤狀態或鎖定狀態,VCXO輸出的12 MHz信號經分頻器1進行240分頻后得到50 kHz的脈沖,再輸入到數字鑒相器與GPS接收機輸出的1 PPS秒脈沖進行相位比較,其相位差經微處理器和D/A轉換后變成VCXO的壓控電壓,調整VCXO的輸出頻率,修正VCXO因老化引起的頻率漂移,實現本地輸出的頻率信號與GPS秒脈沖信號嚴格同步,取得良好的長期穩定度特性,進而實現高穩定度的基準頻率源。
通過設置分頻器2的分頻比可以獲得不同頻率的基準信號,該基準信號可以送到FM發射機PLL頻率合成器的鑒相器輸入端,作為參考信號使用,從而使發射機具有與基準頻率源相同的頻率穩定度。
在GPS接收機工作不正常,如衛星部分或全部失鎖時,微處理器設置設備工作于保持狀態,此時環路維持保持狀態開始之前、跟蹤狀態下最后一個D/ A 變換器輸出的VCXO壓控電壓值數據不變。此時,輸出信號的頻率穩定度依賴于所使用的VCXO的頻率穩定度,所以VCXO的穩定度也要盡可能高。由于同播發射機一般固定放置在較高位置,這種情況出現的幾率不高,且持續時間也不長,對民用通信系統來說是可以接受的。當微處理器重新檢測到1 PPS秒脈沖時,解除保持狀態,鎖相環可快速進入鎖定狀態。
3.3 電路實現
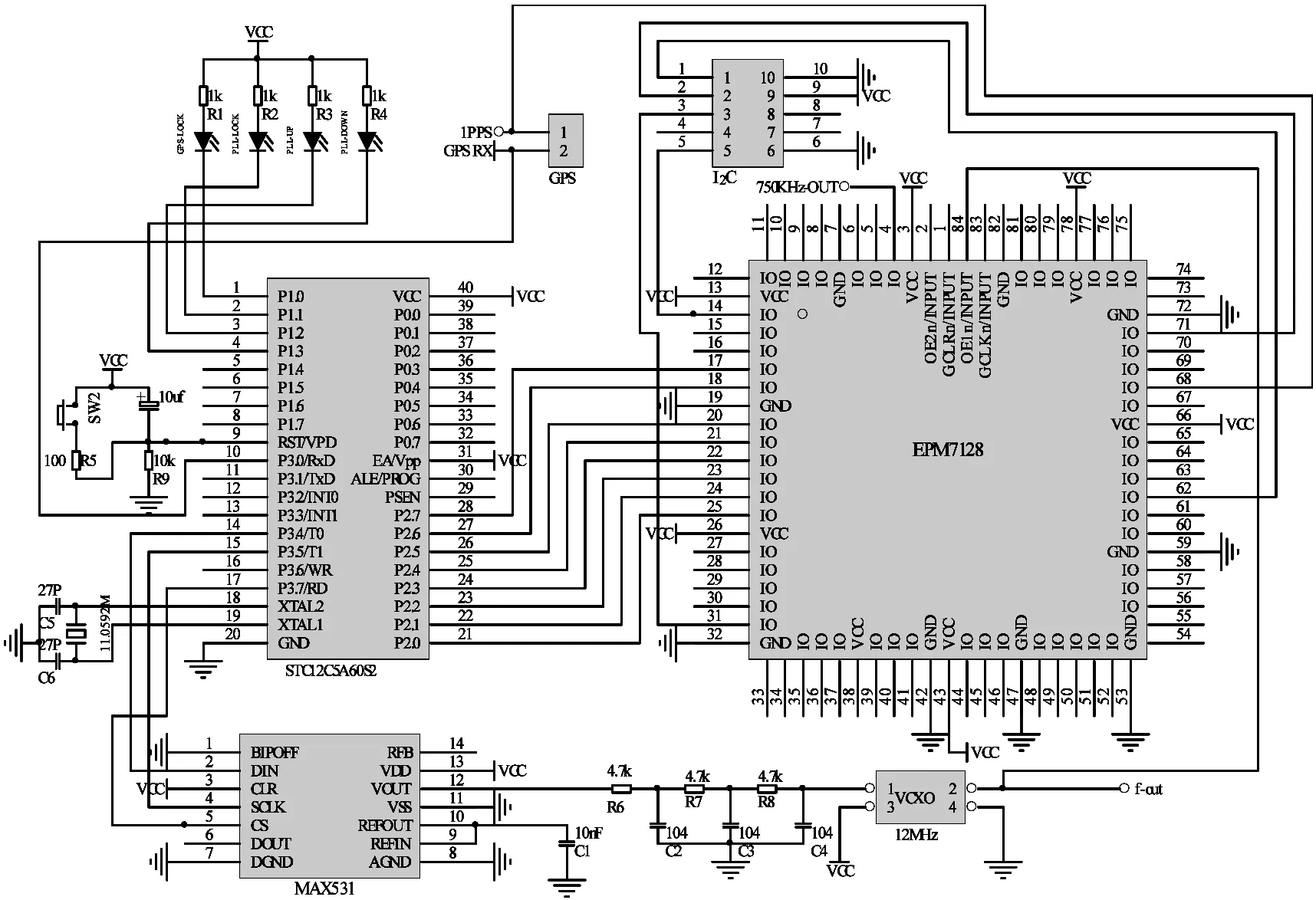
圖3 高穩定度基準頻率源的電路原理圖Fig.3 Circuit schematic diagram of high-stability reference frequency source
根據上述原理,本文設計并實現了一種基于GPS的高穩定度基準頻率源,其電路原理圖如圖3所示。
基于CPLD-EPM7128的鑒相器是高穩定度基準頻率源的關鍵部件,除完成相位比較器的功能外,還要測量相位誤差脈沖的脈寬。來自GPS 接收機的1 PPS秒脈沖輸入到CPLD的Pin68腳,VCXO的輸出接到CPLD的Pin83腳。經分頻、鑒相和脈沖計數后,將相位誤差信號以8位并行數據方式從CPLD的 Pin17~25腳輸出到微處理器STC12C5A60S2的P2口。微處理器進行并/串轉換后,由STC12C5A60S2的P3.4輸入到D/A轉換器Max531的Pin2腳,經DAC轉換后在Max531的Pin12腳得到根據相位差每秒變化一次的直流電壓。該電壓經由R6、R7、R8、C2、C3、C4構成的環路濾波器后形成VCXO的控制電壓,調整VCXO的頻率輸出。在ADS中對這個環路濾波器進行了仿真分析,其幅頻特性如圖4所示。
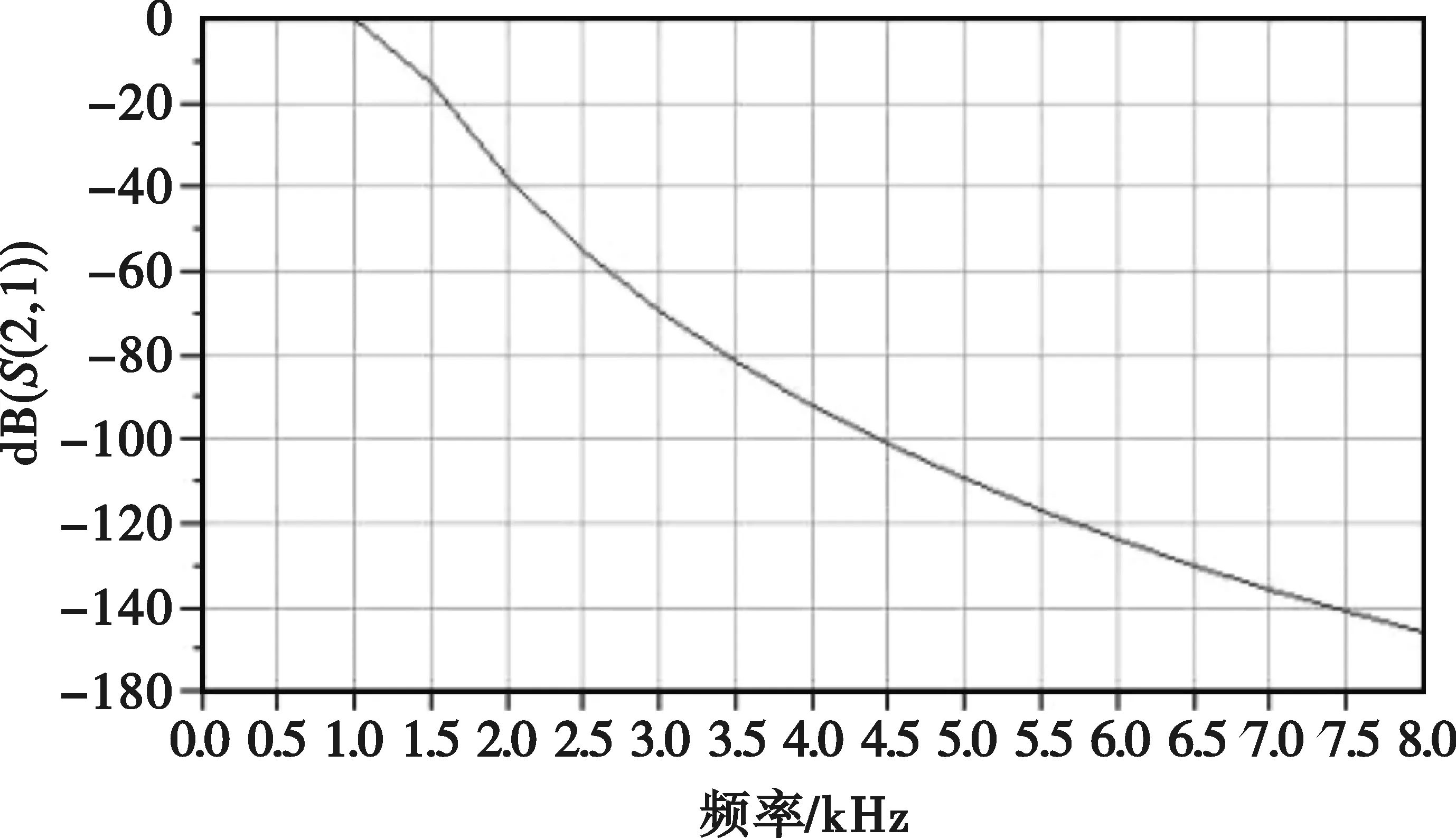
圖4 環路濾波器幅頻特性的ADS仿真結果Fig.4 ADS simulation results of loop filter amplitude-frequency characteristics
為了指示設備的工作狀態,使用了4個發光二極管。GPS-LOCK 用于指示GPS是否正常工作,PLL-LOCK用于指示PLL是否鎖定,PLL-UP和 PLL-DOWN用于指示鎖相環在捕獲過程中環路VCXO輸出頻率增高和降低的情況,這4個LED均受單片機控制。
4 設計要點
4.1 數字鑒相器
數字鑒相器將每一個1 PPS秒脈沖的上升沿與其后最接近的50 kHz信號的第一個上升沿時間比較,并且產生一個相位誤差脈沖,其寬度精確地等于兩者的時間差,即在每一個1 PPS秒脈沖的開始時產生一個相位誤差脈沖,而其脈沖寬度可以從零(當兩個信號完全同步時)到理論上的最大值10 μs(兩個信號在50 kHz信號的一個周期內部同步)之間變化。如圖5所示,Jupiter GPS OEM板輸出的1 PPS秒脈沖信號其高電平持續時間為25.6 ms。
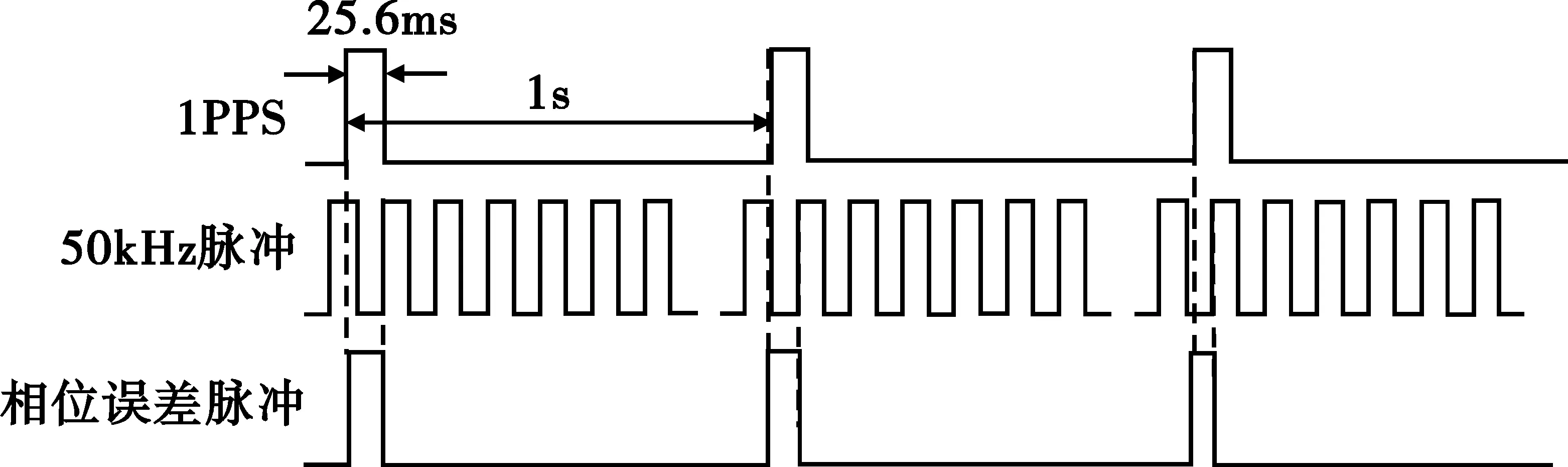
圖5 數字鑒相器相位比較波形示意圖Fig.5 Waveform diagram of phase comparison in digital phase detector
4.2 控制電壓的產生
為了測試誤差脈沖寬度,從微處理器引入了一個約11.059 2 MHz的時鐘信號作計數脈沖信號。當誤差脈沖信號為高電平時,允許計數器開始對計數脈沖計數,計數脈沖的個數正比于誤差脈沖寬度,即正比于相位差。由于誤差脈沖寬度的變化,計數器會得到不同數量的“11.059 2 MHz脈沖”。如誤差脈沖寬度為10 μs,計數脈沖個數為111;如誤差脈沖寬度為8 μs,計數脈沖個數為88。計數器準確地在每個1 PPS秒脈沖結束時復位。
引入11.059 2 MHz計數脈沖的好處是可以減小D/A轉換之后的直流誤差電壓的增量,保證VCXO更精確地鎖定在12 MHz。
4.3 鎖定頻率分析
由于用振蕩器頻率除以了240,這使得鎖定振蕩器頻率在11.999 76 MHz或11.999 52 MHz及12.000 24 MHz或12.000 48 MHz時有效。換句話說,鎖相環頻率鎖定能力是從12 MHz開始的,按頻率差每240 Hz及其整倍數加以區別。這就意味著,在設置這個基準頻率源時要調整主振蕩器的自由振蕩頻率在12 MHz±120 Hz之內,否則,鎖相環就會將鎖定頻率定為11.999 76 MHz或12.000 24 MHz,不是正確的頻率了。啟動時如果VCXO偏移12 MHz較大,此時利用數字鎖相原理進行調整的時間是不能容忍的,應采用輔助手段在啟動時實現鎖相環的快速鎖定。所以在開啟GPS接收機前,需調節VCXO的自由振蕩頻率為12 MHz±5 Hz,以確保環路在開啟時能快速、準確地鎖定在12 MHz。
5 實驗測試
按照本文提出的方法,筆者制作了一套高穩定度基準頻率源,并用此基準頻率源替代了日本KYODO生產的FM中繼臺KG110中的12 MHz溫度補償晶體振蕩器(TCXO)。對已改造的發射機和未改造的發射機進行了24 h老化對比實驗,之后又在不接GPS天線時對改造后的發射機進行了老化實驗。實驗時發射機的工作頻率均為450 MHz,并用同一臺專用頻率計觀測其頻率的變化。測試結果表明,未改造的發射機頻率漂移量為568 Hz,對應的頻率穩定度為568/450×106≈1×10-6;改造后的發射機接GPS接收機時,頻率漂移量為1 Hz,對應的頻率穩定度為1/450×106≈2×10-9;不接GPS接收機時,頻率漂移量為48 Hz,對應的頻率穩定度為48/450×106≈1×10-7。
可見,本文提出的方法能夠有效地提高發射機的頻率穩定度,完全能夠滿足同頻同播系統對同播發射機的要求。
6 結束語
本文根據GPS秒時鐘無累計誤差和晶振時鐘累計誤差較大、無隨機誤差的特點,提出了一種利用GPS秒時鐘修正晶振頻率實現高穩定度基準頻率源的方法。該方法所產生的基準頻率源具有較高的頻率穩定度,且實現過程簡單,完全能滿足同播發射機的要求。目前,這種基于GPS的高穩定度頻率源已應用于部分同播系統中,下一步將進一步研究GPS失鎖時如何修正VCXO的頻率漂移問題,使基準頻率源既充分利用GPS又不完全依賴GPS,以滿足同播系統和其它應用系統的需求。
參考文獻:
[1] 陳愛萍,陳昌明.同頻同播系統中同頻干擾及其抑制對策[J]. 電訊技術,2009,49(11):18-22.
CHEN Ai-ping, CHEN Chang-ming. The Co-channel Interference and its Restraining Measures in Co-frequency Simulcast System[J]. Telecommunication Engineering,2009,49(11):18-22. (in Chinese)
[2] CONLEY R, LAVRAKAS J W. Global implications on the removal of selective availability[C]// Proceedings of the 2000 IEEE Position Location and Navigation Symposium.San Diego, CA, USA: IEEE, 2000: 506-513.
[3] LEWANDOWSKI W, PETIT G, THOMAS C. Precision and accuracy of GPS time transfer[J]. IEEE Transactions on Instrumentation and Measurement , 1993, 42 (2) : 474-479.
[4] 王元虎, 周東明. 衛星時鐘在電網中應用的若干技術問題[J].中國電力,1998,31(2):10-13.
WANG Yuan-hu, ZHOU Dong-ming. Some Technical Problems of Satellite Clock Aplied on Power Network[J]. Electric Power, 1998,31(2):10-13.(in Chinese)
[5] 郭振坤. GPS高精度時間-頻率同步設備設計和實現[J]. 全球定位技術,2009(2):31-35.
GUO Zhen-kun. Design and Implication for High Accuracy GPS Time and Frequency Synchronization System[J]. GNSS World of China, 2009(2):31-35. (in Chinese)
[6] 徐丙垠,李桂義,李京,等.接收GPS衛星信號的電力系統同步時鐘[J].電力系統自動化,1995,19(3):18-20.
XU Bing-yin, LI Gui-yi, LI Jing, et al. Synchronous Clock in Power System by Receiving Signal from GPS[J]. Automation of Electric Power Systems,1995, 19 (3): 18-20. (in Chinese)
[7] 臧其源,林時昌.振蕩器的頻率穩定度及其對電子系統的影響[M]. 北京:宇航出版社,1990.
ZANG Qi-yuan, LIN Shi-chang. Frequency Stability of Oscillator and Its Effects on Electronic System[M]. Beijing: China Astronautic Publishing House, 1990. (in Chinese)
[8] 張厥盛,鄭繼禹,萬心平.鎖相技術[M]. 西安: 西安電子科技大學出版社,1994.
ZHANG Que-sheng, ZHENG Ji-yu,WAN Xin-ping. Phase Lock Technique[M]. Xi′an: Xidian University Press, 1994. (in Chinese)
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
電子制作(2018年9期)2018-08-04 03:31:04
電子制作(2018年12期)2018-08-01 00:48:02
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
西部廣播電視(2015年9期)2016-01-18 03:46:07
西部廣播電視(2015年8期)2016-01-16 03:45:32
西部廣播電視(2015年3期)2016-01-15 02:05:45
西部廣播電視(2015年1期)2016-01-15 02:05:37