離散伺服定位系統(tǒng)的復(fù)合非線(xiàn)性控制
2010-09-20 05:48:12程國(guó)揚(yáng)彭可茂王惠
電機(jī)與控制學(xué)報(bào) 2010年1期
關(guān)鍵詞:系統(tǒng)設(shè)計(jì)
程國(guó)揚(yáng), 彭可茂, 王惠
(1.福州大學(xué)電氣工程與自動(dòng)化學(xué)院,福建福州 350108;2.新加坡國(guó)立大學(xué)Temasek實(shí)驗(yàn)室,新加坡 117508)
0 引言
伺服定位系統(tǒng)在工業(yè)加工和裝配生產(chǎn)線(xiàn)中廣泛存在。典型的伺服定位系統(tǒng),要求系統(tǒng)的輸出量能夠快速、平穩(wěn)且準(zhǔn)確地進(jìn)入目標(biāo)位置的鄰域,即系統(tǒng)同時(shí)具有良好的瞬態(tài)性能和穩(wěn)態(tài)性能。為實(shí)現(xiàn)這個(gè)目標(biāo),需要引入反饋控制技術(shù)。目前已提出多種伺服控制方案[1],其中應(yīng)用最廣的為PID控制,包括常規(guī)的PID以及各種改進(jìn)型 PID[2-3]。PID控制的優(yōu)點(diǎn)是結(jié)構(gòu)簡(jiǎn)單、容易實(shí)現(xiàn),但由于它是一種單自由度結(jié)構(gòu)的控制,其性能具有內(nèi)在的局限性,難以兼顧系統(tǒng)快速響應(yīng)與低超調(diào)之間的矛盾。
文獻(xiàn)[4]提出一種基于線(xiàn)性反饋和非線(xiàn)性反饋的復(fù)合非線(xiàn)性反饋(composite nonlinear feedback,CNF)控制技術(shù),其核心思想是通過(guò)加入非線(xiàn)性反饋來(lái)動(dòng)態(tài)改變閉環(huán)極點(diǎn)的阻尼,以綜合輕阻尼系統(tǒng)的快速響應(yīng)性能和重阻尼系統(tǒng)的低超調(diào)特性,從而實(shí)現(xiàn)快速平穩(wěn)的設(shè)定點(diǎn)跟蹤。但文獻(xiàn)[4]的CNF控制沒(méi)有考慮擾動(dòng)因素的影響,當(dāng)系統(tǒng)中存在擾動(dòng)時(shí),CNF控制下的系統(tǒng)輸出通常會(huì)有穩(wěn)態(tài)誤差。文獻(xiàn)[5-6]分別提出在CNF中嵌入積分控制和擾動(dòng)估計(jì)的方法來(lái)消除常值擾動(dòng)的影響,從而實(shí)現(xiàn)準(zhǔn)確的定位。文獻(xiàn)[7]把CNF與近似時(shí)間最優(yōu)控制結(jié)合起來(lái),以實(shí)現(xiàn)大范圍的準(zhǔn)確定位。文獻(xiàn)[4-7]的設(shè)計(jì)都是在連續(xù)時(shí)間域內(nèi),設(shè)計(jì)的控制器最終必須經(jīng)過(guò)離散化后才能在實(shí)際系統(tǒng)上實(shí)現(xiàn),這種模擬化設(shè)計(jì)通常要求一個(gè)30倍閉環(huán)帶寬的離散采樣頻率,否則實(shí)際控制性能將出現(xiàn)較大的偏差,從而增加了設(shè)計(jì)和調(diào)試的工作量。在離散時(shí)間域上直接設(shè)計(jì)出數(shù)字控制器是一個(gè)更合理的選擇。文獻(xiàn)[8]給出了在離散時(shí)間域上帶有積分控制的CNF設(shè)計(jì)方法。當(dāng)擾動(dòng)值或參考目標(biāo)有所變化時(shí),積分控制造成系統(tǒng)瞬態(tài)性能惡化,往往需要重新整定參數(shù)才能恢復(fù)系統(tǒng)原來(lái)的瞬態(tài)性能。
本文在離散域CNF設(shè)計(jì)的基礎(chǔ)上,舍棄積分控制,采用一種擴(kuò)展?fàn)顟B(tài)觀(guān)測(cè)器來(lái)同時(shí)實(shí)現(xiàn)對(duì)系統(tǒng)未知狀態(tài)和未知擾動(dòng)的準(zhǔn)確估計(jì),并用于反饋控制和擾動(dòng)補(bǔ)償,以實(shí)現(xiàn)理想的伺服跟蹤性能,其性能對(duì)給定目標(biāo)和擾動(dòng)值的變化不敏感,從而有利于實(shí)際應(yīng)用和推廣。
1 基于擾動(dòng)觀(guān)測(cè)的離散復(fù)合非線(xiàn)性控制
復(fù)合非線(xiàn)性反饋控制包含一個(gè)擾動(dòng)觀(guān)測(cè)和補(bǔ)償機(jī)制,以消除伺服系統(tǒng)中由擾動(dòng)引起的靜態(tài)偏差。該方法保持了現(xiàn)有CNF控制方法的快速、平穩(wěn)和準(zhǔn)確的性能,同時(shí)還具有很好的性能魯棒性,因而被稱(chēng)為魯棒復(fù)合非線(xiàn)性反饋(robust composite nonlinear feedback,RCNF)控制。
典型的伺服控制系統(tǒng)是一個(gè)控制輸入飽和受限的單輸入單輸出系統(tǒng),數(shù)學(xué)模型為
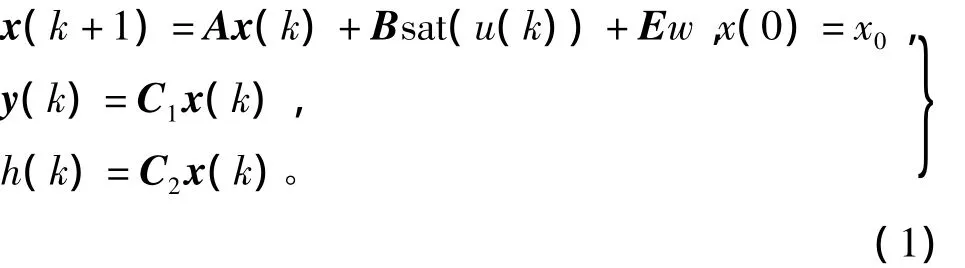
式中:x∈Rn;u∈R;y∈Rp,h∈R,w∈R 分別為狀態(tài)變量、控制輸入、測(cè)量輸出、受控輸出和擾動(dòng)。A、B、C1、C2、E為定常矩陣。函數(shù)sat()為飽和限幅函數(shù),定義為

假設(shè)系統(tǒng)滿(mǎn)足條件:
1)(A,B)可鎮(zhèn)定;
2)(A,C1)能觀(guān);
3)(A,B,C2)可逆,并且在 z=1處無(wú)不變零點(diǎn);
4)w是有界未知常值擾動(dòng);
5)h也是可測(cè)的,即它是測(cè)量輸出的一部分。
上述條件是跟蹤控制問(wèn)題的標(biāo)準(zhǔn)假設(shè)條件。控制設(shè)計(jì)的目的是使帶擾動(dòng)的系統(tǒng)受控輸出h能盡快平穩(wěn)且無(wú)靜差地跟蹤參考輸入信號(hào)r。
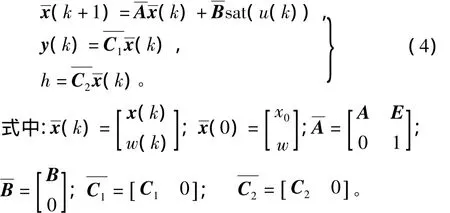
由于假設(shè)擾動(dòng)是某個(gè)常值w,有

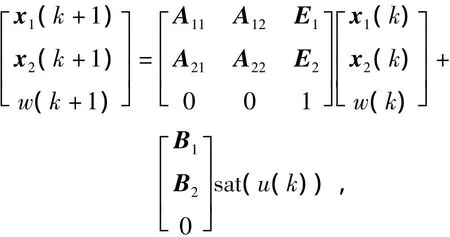
將式(3)加入系統(tǒng)模型中,得到增廣系統(tǒng)為
RCNF控制律的設(shè)計(jì)步驟為:①設(shè)計(jì)線(xiàn)性反饋律;②設(shè)計(jì)非線(xiàn)性反饋律;③設(shè)計(jì)觀(guān)測(cè)器來(lái)估計(jì)不可量測(cè)的狀態(tài)信號(hào)和未知常值擾動(dòng);④綜合線(xiàn)性反饋、非線(xiàn)性反饋和觀(guān)測(cè)器形成完整的控制律。
1)首先假設(shè)所有的狀態(tài)變量和擾動(dòng)都是可測(cè)量的。針對(duì)系統(tǒng)(1)設(shè)計(jì)一個(gè)帶有擾動(dòng)補(bǔ)償?shù)木€(xiàn)性狀態(tài)反饋控制律為

其中F的選取應(yīng)滿(mǎn)足以下條件:
1)A+BF漸近穩(wěn)定;
2)閉環(huán)傳遞函數(shù)C2(zI-A-BF)-1B具有某種期望特性。
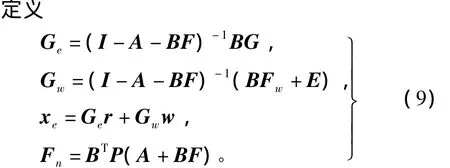
F的設(shè)計(jì)準(zhǔn)則是使閉環(huán)系統(tǒng)具有一對(duì)主導(dǎo)極點(diǎn),且其具有較小的阻尼比。這將使閉環(huán)系統(tǒng)具有快速的響應(yīng)。G和Fw分別選擇為

式(6)、式(7)中矩陣求逆的可行性是有保證的,因?yàn)橐鸭僭O(shè)(A,B,C2)可逆且在z=1處無(wú)不變零點(diǎn)。式(6)、式(7)的取值可保證在線(xiàn)性控制律(5)的作用下,系統(tǒng)輸出量h將漸近趨向于參考目標(biāo)r。
2)選擇一個(gè)正定矩陣W∈Rn×n,求解Lyapunov方程為

得到一個(gè)正定矩陣P,由于A(yíng)+BF漸近穩(wěn)定,此解總是存在的。
式中xe是系統(tǒng)狀態(tài)向量x(k)的穩(wěn)態(tài)目標(biāo)值,且可以驗(yàn)證C2xe=r。RCNF的非線(xiàn)性反饋律為

式中ρ(e(k))是誤差e(k)=h(k)-r的非線(xiàn)性增益函數(shù),用來(lái)逐漸改變閉環(huán)系統(tǒng)阻尼比,以得到一個(gè)較好的跟蹤性能。
3)設(shè)計(jì)一個(gè)降階觀(guān)測(cè)器來(lái)估計(jì)不可量測(cè)的狀態(tài)變量和未知的擾動(dòng)。為簡(jiǎn)單起見(jiàn),假設(shè)在系統(tǒng)(1)的測(cè)量輸出矩陣為

相應(yīng)地,增廣系統(tǒng)(4)可被分割為
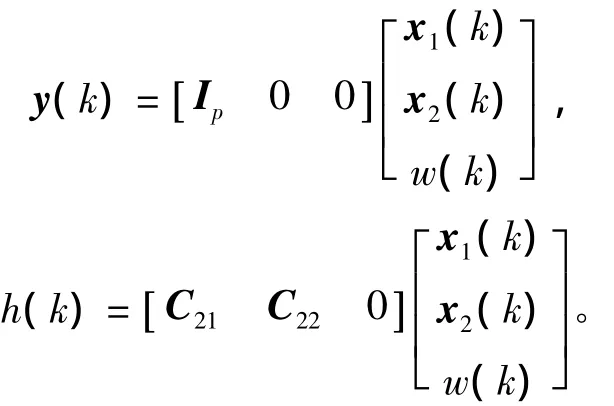
顯然,x1即為測(cè)量輸出y,所以?xún)H需估計(jì)x2和w。
定義
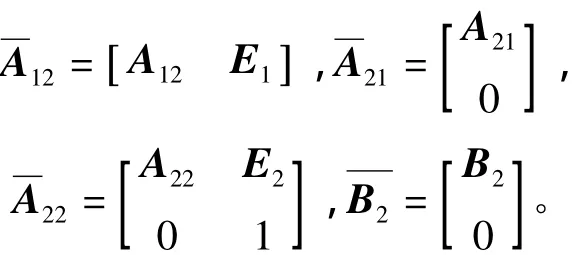
選擇觀(guān)測(cè)器增益矩陣K,將+K A12的特征值配置在z平面以原點(diǎn)為中心的單位圓內(nèi)。
得到的降階觀(guān)測(cè)器方程[8]為
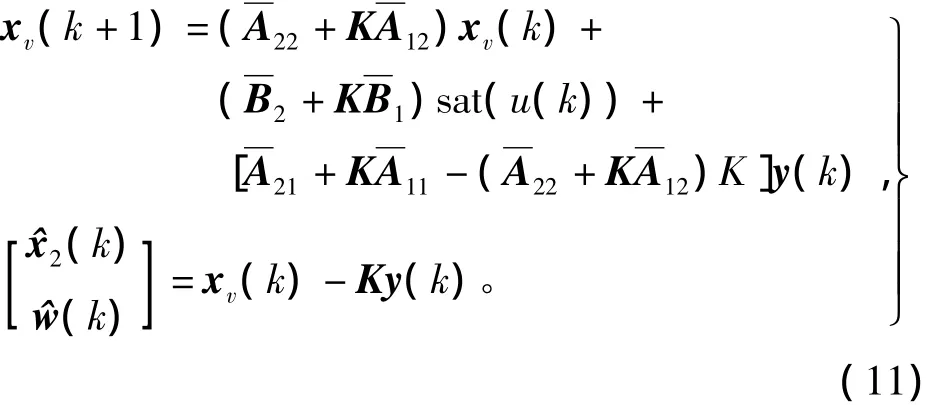
4)將線(xiàn)性反饋律、非線(xiàn)性反饋律和降階觀(guān)測(cè)器合并成最終的控制器,其中,不可量測(cè)的狀態(tài)變量和未知擾動(dòng)被各自的估計(jì)值代替。
基于觀(guān)測(cè)器(11)的離散RCNF控制律為
2 閉環(huán)系統(tǒng)穩(wěn)定性分析
控制律(11)、(12)能解決系統(tǒng)(1)的定點(diǎn)跟蹤問(wèn)題。為便于推導(dǎo),對(duì)反饋增益陣F和Fn進(jìn)行分解,使其與x1和x2相一致,即

選取一個(gè)正定矩陣 WQ∈R(n-p+1)×(n-p+1),滿(mǎn)足

求解關(guān)于正定矩陣Q的Lyapunov方程為

定理1 考慮式(1)給出的系統(tǒng),其中未知擾動(dòng)w的幅值以某個(gè)非負(fù)常數(shù)τw為界,即。在下列條件全部滿(mǎn)足的情況下,存在一個(gè)常數(shù)ρ^>0,使得對(duì)于滿(mǎn)足的任一平滑非正函數(shù)ρ(e(k)),由式(11)和式(12)構(gòu)成的RCNF控制律能使系統(tǒng)的受控輸出h(k)漸近無(wú)靜差地跟蹤定值參考目標(biāo)r:
1)存在正常數(shù)δ∈(0,1)和cδ>0滿(mǎn)足
為了表達(dá)簡(jiǎn)單,省略非線(xiàn)性函數(shù)ρ(e(k))的參數(shù)e(k),并且在不引起混淆的情況下省略時(shí)間索引(k)。
可驗(yàn)證式(20)成立,為

則系統(tǒng)的誤差動(dòng)態(tài)方程可表示為
根據(jù)控制信號(hào) u的幅值范圍,由式(19)和式(22),v可以表示為
顯然對(duì)所有可能的情況v均可以寫(xiě)為
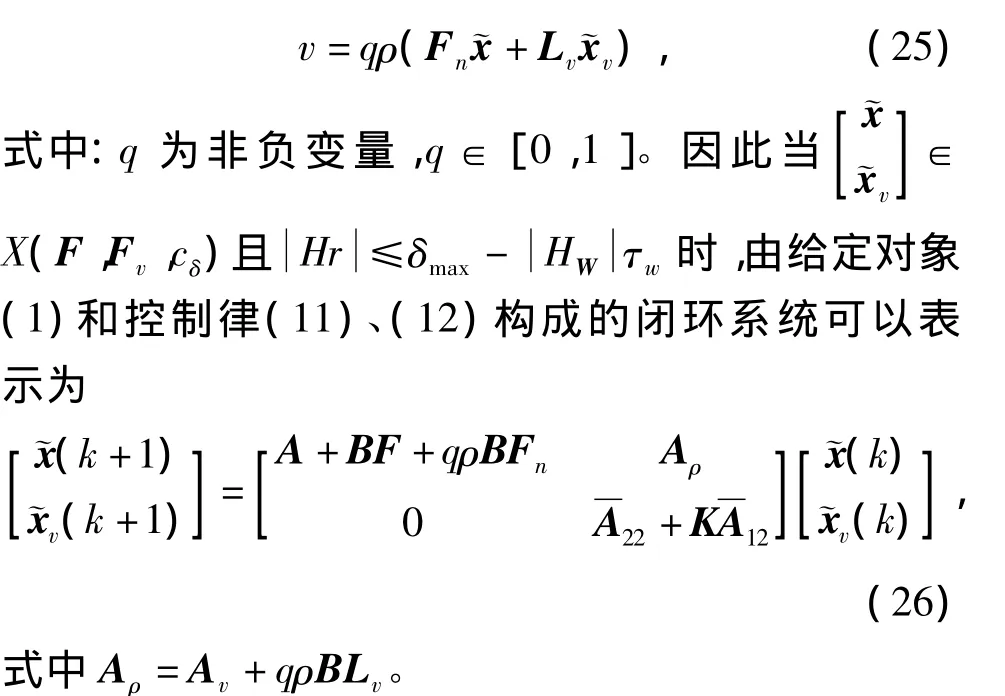
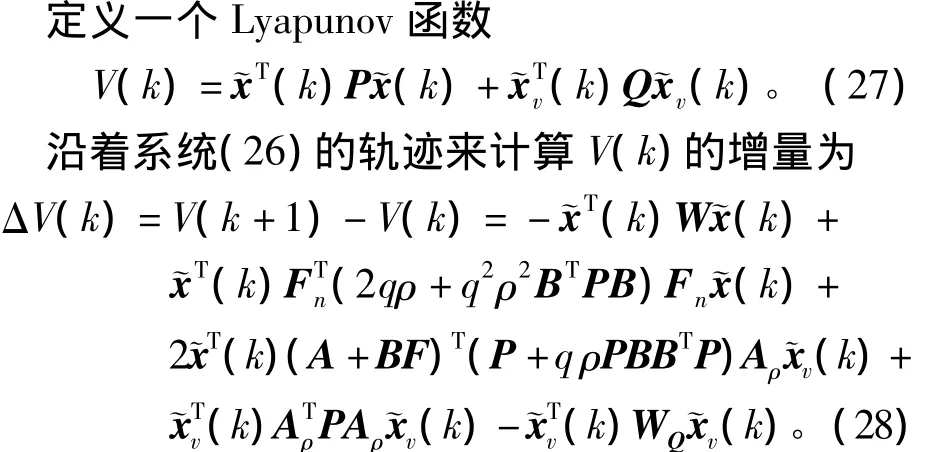
需要證明當(dāng)初始條件x0、xv0,參考目標(biāo)r和擾動(dòng)w滿(mǎn)足定理中的限制條件時(shí),誤差動(dòng)力學(xué)方程(26)是漸近穩(wěn)定的。
即系統(tǒng)輸出h(k)漸近無(wú)靜差地跟蹤參考目標(biāo)r。
定理1證畢。
由式(26)的誤差動(dòng)力學(xué)方程可以看出:閉環(huán)系統(tǒng)的特征根可隨ρ(e(k))和矩陣P而改變,而P由W陣來(lái)決定。通過(guò)合理選擇W和ρ(e(k))的參數(shù),可以調(diào)整控制律從而改進(jìn)閉環(huán)系統(tǒng)的響應(yīng)。總的來(lái)說(shuō),應(yīng)選擇一個(gè)合適的矩陣W>0陣和ρ(e(k)),以使得在穩(wěn)態(tài)(e(k)=0)時(shí)閉環(huán)系統(tǒng)具有一對(duì)較大阻尼比的主導(dǎo)極點(diǎn)。這將有助于抑制系統(tǒng)輸出響應(yīng)的超調(diào)量。W的選擇不是唯一的。一種可行的方法是把W陣限定為對(duì)角正定陣,并通過(guò)仿真來(lái)調(diào)整對(duì)角元素的值。
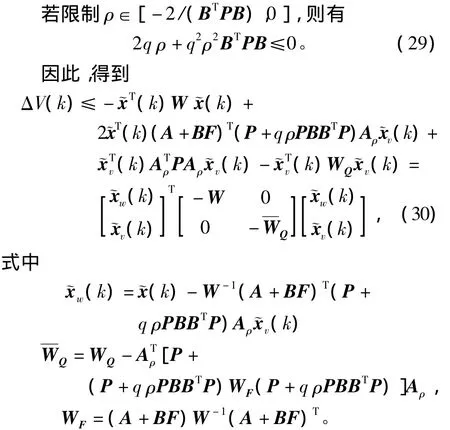
選取ρ(e(k))的一般準(zhǔn)則是:它是關(guān)于e(k)的平滑非正函數(shù),且 ρ(e(k))∈[-2/(BTPB),0]。一種可行的但不是唯一的選擇為
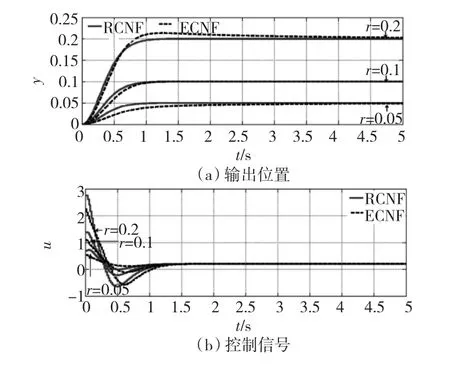
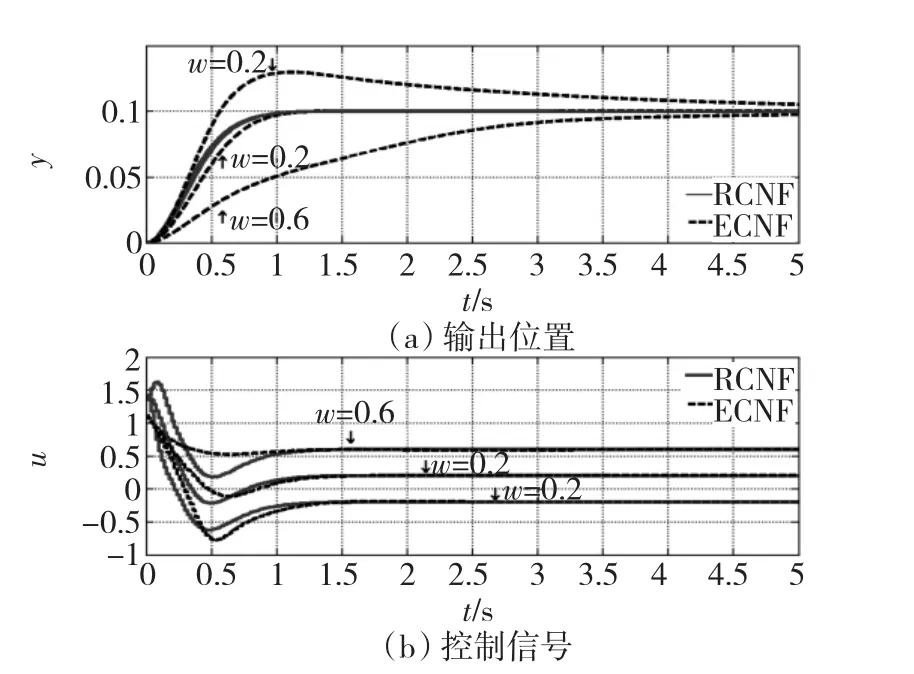
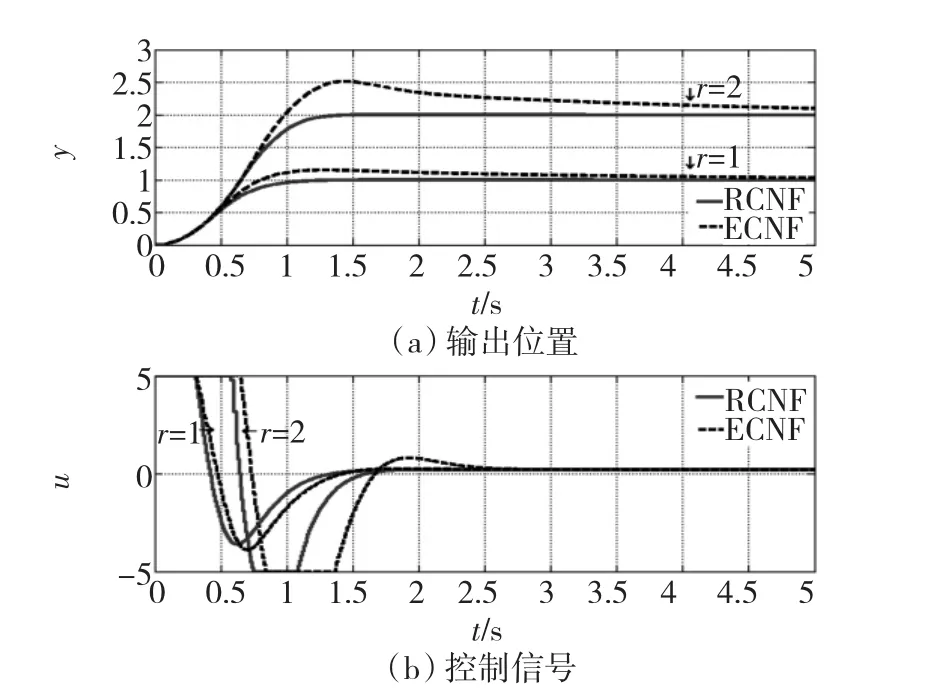
ρ(e(k))= -β/(BTPB)sech(α α0e(k)), (31)式中0≤α;0≤β≤2;sech()是雙曲正割函數(shù),sech(x)=2[exp(x)+exp(-x)],顯然0 當(dāng)h趨近于r時(shí),ρ(e(k))將從-β/(BTPB)×sech(α)逐漸減小到 -β/(BTPB)。參數(shù) α 可調(diào)節(jié)ρ(e(k))的變化率。 將系統(tǒng)模型按采樣周期Ts=0.01s進(jìn)行基于零階保持器的離散化,得到如式(1)所示的離散狀態(tài)空間模型,對(duì)應(yīng)的系數(shù)矩陣為 選擇一對(duì)閉環(huán)極點(diǎn)的阻尼比為0.4,自然頻率為π,從而得到線(xiàn)性反饋控制律(5)中的參量為 由于 B=E,可知Fw= -1,Gw=0。 選取矩陣W為對(duì)角陣diag(100,1),得到非線(xiàn)性反饋律(10)中各矩陣為 非線(xiàn)性增益函數(shù)為 其中參數(shù)α0按式(32)計(jì)算。 將系統(tǒng)按式(4)增廣后設(shè)計(jì)一個(gè)降階觀(guān)測(cè)器來(lái)估計(jì)狀態(tài)變量和擾動(dòng)信號(hào)。把觀(guān)測(cè)器的極點(diǎn)按Butterworth模式配置,其截止頻率選為采樣頻率的10%,得到觀(guān)測(cè)器增益矩陣為 相應(yīng)地,根據(jù)式(11)可得觀(guān)測(cè)器方程為 最終的離散RCNF控制律為 為了進(jìn)行比較,按照文獻(xiàn)[8]提出的基于誤差積分的增強(qiáng)復(fù)合非線(xiàn)性反饋(enhanced composite nonlinear feedback,ECNF)控制方案設(shè)計(jì)控制器為 RCNF控制器和ECNF控制器的控制信號(hào)需經(jīng)過(guò)飽和限幅后才能進(jìn)入系統(tǒng)的輸入端。2個(gè)控制器都在r=0.1和w=-0.2的標(biāo)稱(chēng)情況下進(jìn)行參數(shù)整定,確保其具有優(yōu)越的性能:2%調(diào)節(jié)時(shí)間為1 s,超調(diào)量很小。隨后,分別改變參考目標(biāo)r和擾動(dòng)w的值,在Matlab/SIMULINK環(huán)境下進(jìn)行仿真比較。仿真結(jié)果如圖1~圖3所示。可以看出:在各種條件下,2個(gè)控制器都能實(shí)現(xiàn)對(duì)參考目標(biāo)的漸近無(wú)靜差跟蹤,即穩(wěn)態(tài)誤差為零,同時(shí)控制量u穩(wěn)態(tài)趨向于擾動(dòng)的相反值,剛好抵消擾動(dòng)信號(hào);但標(biāo)稱(chēng)情況下具有良好性能的ECNF控制器對(duì)參考目標(biāo)和擾動(dòng)的變化非常敏感,其瞬態(tài)性能發(fā)生很明顯的惡化;而RCNF控制器在各種目標(biāo)或擾動(dòng)值下的性能基本保持不變。圖1中RCNF控制器在3種目標(biāo)值下的調(diào)節(jié)時(shí)間都在1 s左右,無(wú)明顯超調(diào)。圖2中RCNF控制器在3種擾動(dòng)值下的系統(tǒng)輸出響應(yīng)曲線(xiàn)幾乎重合在一起。圖3表明在控制信號(hào)飽和情況下(w=-0.2),RCNF控制器仍具有良好的性能,盡管其調(diào)節(jié)時(shí)間隨參考目標(biāo)的增大略有增加。綜合以上結(jié)果,RCNF控制器可以在不同的擾動(dòng)和目標(biāo)值條件下正常工作,即其性能具有較好的魯棒性。 圖1 仿真結(jié)果(w=-0.2,r=0.05,0.1,0.2)Fig.1 Simulation results for w= -0.2 and r=0.05,0.1,0.2 圖2 仿真結(jié)果(r=0.1,w=0.2,-0.2,-0.6)Fig.2 Simulation results for r=0.1 and w=0.2,-0.2,-0.6 圖3 控制信號(hào)飽和時(shí)的仿真結(jié)果Fig.3 Simulation results in case of control saturation 本文提出了一種離散時(shí)間復(fù)合非線(xiàn)性反饋控制方案,用于實(shí)現(xiàn)快速和準(zhǔn)確的定點(diǎn)跟蹤。控制律以復(fù)合非線(xiàn)性反饋控制為主體,利用擴(kuò)展?fàn)顟B(tài)觀(guān)測(cè)器來(lái)估計(jì)系統(tǒng)狀態(tài)和擾動(dòng)信號(hào)并進(jìn)行補(bǔ)償。在一個(gè)典型的雙積分伺服系統(tǒng)上進(jìn)行仿真研究并與基于積分控制的CNF控制方案進(jìn)行比較。結(jié)果表明:提出的控制方案可以實(shí)現(xiàn)快速、平穩(wěn)和準(zhǔn)確的伺服定位,且其性能具有更好的魯棒性。進(jìn)一步的研究工作將考慮時(shí)變的擾動(dòng)信號(hào)。 [1]劉強(qiáng).高性能機(jī)械伺服系統(tǒng)運(yùn)動(dòng)控制技術(shù)綜述[J].電機(jī)與控制學(xué)報(bào),2008,12(5):603-609. LIU Qiang.Survey on motion control technologies of high performance mechanical servo systems[J].Electric Machines and Control,2008,12(5):603-609. [2]ANG K H,CHONG G,LI Y.PID control system analysis,design,and technology[J].IEEE Transactions on Control Systems Technology,2005,13(4):559-576. [3]SERAJI H.A new class of nonlinear PID controllers with robotic applications[J].Journal of Robotic System,1998,15(3):161 -181. [4]CHEN B M,LEE T H,PENG K M,et al.Composite nonlinear feedback control for linear systems with input saturation:theory and an application[J].IEEE Transactions on Automatic Control,2003,48(3):427-439. [5]PENG K M,CHEN B M,CHENG G Y,et al.Modeling and compensation of nonlinearities and friction in a micro hard disk drive servo system with nonlinear feedback control[J].IEEE Transactions on Control Systems Technology,2005,13(5):708-721. [6]CHENG G Y,PENG K M.Robust composite nonlinear feedback control with application to a servo positioning system[J].IEEE Transactions on Industrial Electronics,2007,54(2):1132-1140. [7]程國(guó)揚(yáng),曾佳福.快速定位伺服系統(tǒng)的控制器設(shè)計(jì)[J].電機(jī)與控制學(xué)報(bào),2009,13(1):52-56. CHENG Guoyang,ZENG Jiafu.Controller design for fast servo postioning systems[J].Electric Machines and Control,2009,13(1):52-56. [8]PENG K M,CHENG G Y,CHEN B M,et al.Improvement of transient performance in tracking control for discrete-time systems with input saturation and disturbances[J].IET-Control Theory&Applications,2007,1(1):65-74.
3 仿真研究




4 結(jié)語(yǔ)
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17