直驅式電液伺服轉葉舵機退火蟻群尋優PD控制
2010-06-06 10:02:14蘇文海姜繼海劉慶和
電機與控制學報 2010年1期
關鍵詞:策略
蘇文海, 姜繼海, 劉慶和
(1.東北農業大學工程學院,黑龍江 哈爾濱 150030;2.哈爾濱工業大學機電工程學院,黑龍江 哈爾濱 150080)
0 引言
轉葉舵機具有設計緊湊、安裝方便、占用空間小等優勢[1-2],在許多大型艉機型船舶和軍艦上得到了廣泛的應用,是很有前景的舵機形式。傳統的轉葉舵機控制方式主要有比例閥控制和變量泵控制兩種方式,這兩種方式由于采用精密液壓元件,對液壓系統的清潔度要求非常高,而且控制系統復雜,控制元件多,容易發生故障[3]。針對傳統的轉葉舵機伺服系統的弊端,提出并制造了直驅式電液伺服轉葉舵機的原理樣機。該型式舵機和傳統的轉葉舵機相比,用變頻電機驅動定量泵取代了異步電機驅動變量泵或者伺服閥的控制方式,對系統清潔度的要求大大降低。同時,直驅式電液伺服舵機去掉了泵站和管路,減少了控制元件,使得占地面積更小、系統的可靠性更高,節約能源且綠色環保。
直驅式電液伺服轉葉舵機結構緊湊、節約能源且易于安裝,是新型高效的舵機形式。但是,直驅式電液伺服轉葉舵機是一種具有強非線性的電液位置伺服系統,其轉動慣量大、液壓系統能夠調節死區、水動力負載復雜,呈現出時變特性和隨機性,傳統的PD控制器參數整定不良、性能欠佳,已經不能滿足直驅式電液伺服轉葉舵機的控制需求,因此需要一種智能的參數根據運行工況不同而在線整定的PD控制器。
目前PID參數的智能優化方法很多,主要有專家整定法和遺傳算法整定法兩種。專家整定法需要太多的經驗,整理專家庫是一項長時間的工程,需要大量的前期準備工作。遺傳算法具有良好的尋優特性,對初始值不敏感,可避免過早陷入局部最優解,但遺傳算法對系統中的反饋信息利用不夠,當求解到一定范圍時往往做大量無功的冗余迭代,求解效率低,在線整定時間相對較長。為了提高直驅式電液伺服舵機的響應速度和魯棒性,改善舵機系統對輸入信號的跟蹤性能,引進蟻群尋優的PD控制技術,將模擬退火算法與改進的蟻群算法相結合,提出基于模擬退火(simulated annealing,SA)算法[4-5]的蟻群尋優[6-8]PD智能算法,并將其應用到直驅式電液伺服轉葉舵機控制系統中。該算法在蟻群算法正反饋機制的基礎上,通過模擬退火策略來提高控制器跳出局部極值點、進入全局最優解所在區域的能力,提高求得全局最優解的可靠性。在直驅式電液伺服轉葉舵機原理樣機及其加載實驗臺上進行在線實驗。
1 直驅式電液伺服轉葉舵機
直驅式電液伺服轉葉舵機的原理圖如圖1所示。直驅式電液伺服舵機主要由3部分組成:計算機控制部分、電動機伺服調速部分及液壓動力機構。計算機控制部分對位移傳感器的采集信號進行信號處理,由系統主控制器計算處理后,經D/A數模轉換為電壓信號輸出到變頻器,驅動電機控制液壓動力機構,從而控制負載。通過改變變頻電機的正反轉、運動速度和運轉時間控制液壓執行機構的正反向、運動速度和位置,該方案可以充分發揮變頻調速系統的優勢。由于直驅式電液伺服轉葉舵機中沒有使用電液伺服閥和變量泵,使得直驅式電液伺服轉葉舵機抗污能力強,可靠性高,壽命長,節能高效。直驅式電液伺服轉葉舵機可以視為一種大功率大慣性的變頻泵控馬達調速系統,由于大的轉動慣量和液壓系統的調節死區和負載的時變特性等因素的影響,使得控制系統存在較大的時滯,控制系統響應慢,動、靜態性能比較差。
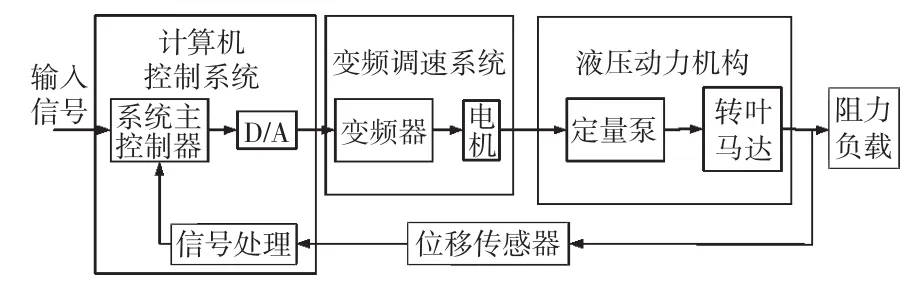
圖1 直驅式電液伺服轉葉舵機組成原理圖Fig.1 Principle sketch of direct drive electro-hydraulic servo rotary vane steering gear
2 退火蟻群尋優PD智能控制器設計
PD智能控制器是在最大最小螞蟻算法(maxmin ant system,MMAS)的基礎上,通過模擬退火策略來決定何種螞蟻被允許釋放信息素,以一定的概率接受性能較差解,使得控制器具有跳出局部極值點、進入全局最優解所在區域的能力,從而避免螞蟻算法早熟,有利于提高求得全局最優解的可靠性,得到PD控制參數的最優解。
2.1 不完全微分PD控制
在常規PID轉向控制響應中,由于積分控制的作用,船舶在到達預定航向前存在一個較大的超調,所以舵機控制系統多采用PD控制。PD控制雖然沒有超調,但是存在穩態誤差,也容易引進高頻干擾,使得舵機頻繁動作,影響舵機系統的穩定性。解決此缺點的方法是在PD控制器中加入一個一階慣性環節(低通濾波器),其傳遞函數為

式中Tf為濾波器時間常數。具有一階慣性環節的微分控制稱為不完全微分控制。不完全微分控制的PD控制器的傳遞函數可以表示為
式中:Kp為比例系數;Td為微分時間常數;Ts為采樣時間;E(s)為輸入與輸出之間的誤差;U(s)為控制量。在離散域內,增量式不完全微分PD控制律可表示為

式中:Kp為比例系數;Kd為微分系數,Kd=KpTd/Ts;λ為常數,且λ=Tf/(Tf+Ts)<1;e(k)為輸入與輸出之間的誤差。與傳統PD控制器相比,不完全PD控制器的算法復雜,具有良好的控制性和魯棒性。
2.2 節點和路徑的生成
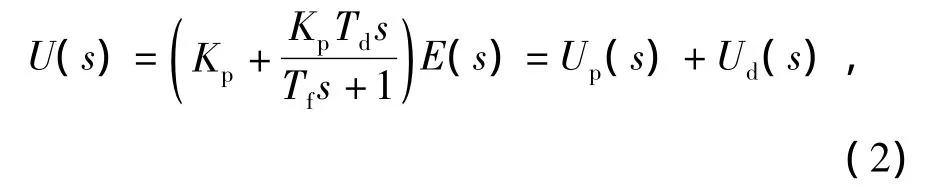
以PD控制器的2個參數Kp和Kd作為待優化的變量,根據直驅式電液伺服轉葉舵機的具體情況,設置Kp具有4位有效數字,其中小數點前占1位,小數點后占3位,Kd具有4位有效數字,其中小數點前后各占2位。圖2所示的可爬行節點(指虛線區域內),交點K(xi,yi,j)為螞蟻可到達的節點,其中:i取1~8中的整數,j取0~9中的整數,L1~L8為平行Y軸的線段。螞蟻由原點依次歷經(x1,y1,j)→(x2,y2,j)→(x3,y3,j)→ (x4,y4,j)→(x5,y5,j)→(x6,y6,j)→(x7,y7,j)→(x8,y8,j)形成爬行路徑,yi,j為節點在線段 Li上的縱坐標,其中 y1,j~ y4,j和 y5,j~y8,j分別為Kp和Kd第1到第4位上的數字。圖2所示的爬行路徑所表示的PD參數的值為:Kp=3.934,Kd=71.29。
圖2 節點及路徑示意圖Fig.2 Sketch map of knot and path
2.3 確定目標函數
為使系統具有良好的響應速度和準確性,采用誤差絕對值時間積分性能指標作為評價控制系統優劣的性能指標,其最優控制系統具有優良的系統響應特性。螞蟻s的目標函數f(s)為

式中e(t)為輸出與輸入的誤差值。
2.4 路徑點的選擇
假設每只螞蟻從線段Li上任意節點爬行到Li+1上任意節點時間相等,則所有螞蟻同時從原點O出發,同時歷經各線段Li并同時到達終點,完成一次循環[9]。設螞蟻總數為 n,τ(xi,yi,j,t)表示 t時刻在節點K(xi,yi,j)上遺留的信息量,初始時刻各節點上的信息量相等,即 τ(xi,yi,j,0)=c,c 為常數,τ(xi,yi,j,0)=0。設第 k 只螞蟻由 Li-1上任一點爬行至K(xi,yi,j)的路徑選擇概率為(t),則有
式中:α為信息啟發式因子;β為期望啟發式因子;分別表示信息素的濃度和能見度在轉移概率中的相對重要性。η(xi,yi,j,t)為節點 K(xi,yi,j)上的能見度,且有

2.5 初始溫度及溫度更新函數
n個人工蟻完成第一次爬行后,確定爬行最優路徑(一次爬行路徑中目標函數值最小的路徑)及其誤差絕對值時間積分性能指標cbest,和周游最差路徑(一次周游路徑中目標函數值最大的路徑)及其誤差絕對值時間積分性能指標cworst。確定初始溫度 t0= -(cworst-cbest)/ln p0,其中的 p0∈[0,1]為初始接受概率。退溫函數采用指數退溫策略tk+1=δtk,δ∈(0,1)為退溫速率。這種退溫策略能較好地折衷、兼顧優化質量和時間性能。
2.6 信息素的更新
最大最小螞蟻算法中,只有構建出迭代以來最優路徑的螞蟻或在本次迭代中構建出最優路徑的螞蟻才被允許更新信息素。使用迭代以來最優螞蟻更新策略,系統收斂很快。但由于正反饋現象的存在,螞蟻在最初的搜索步驟中可探索的路徑較少,在后期的搜索中易于陷入停滯狀態。而使用本次迭代最優螞蟻更新策略,減少了搜索的導向性、增加了搜索能力,但是系統收斂速度較慢。在最大最小螞蟻算法中引入退火策略,可以在不同概率下采用不同的更新策略解決此問題。
全部螞蟻在t+1時刻完成一次爬行后,則各節點信息量 τ(xi,yi,j,t+1)為


式中f(s)為螞蟻s的目標函數值。設本次迭代最優螞蟻為sib,至今迭代最優螞蟻為sgb,在每次迭代中信息素更新時,以概率Psa來使用本次迭代最優螞蟻更新策略,以(1-Psa)的概率來使用至今迭代最優螞蟻更新策略,有
式中:T為退火溫度的參數;μ為退火強度的參數。在算法運行的過程中,T逐漸減小,用以減少接受本次迭代最優螞蟻的概率。為保證算法的收斂速度,退火強度μ取一個較小的數。引入退火策略后,可以看出,在搜索早期,使用本次迭代最優螞蟻更新策略的概率較大,增加了解的多樣性和算法的搜索能力。在搜索中后期,由于初始解的多樣性已使得螞蟻有多種選擇,此時增大使用接受迭代以來最優螞蟻更新策略的概率可以加快收斂速度。由于MMAS陷入停滯時,信息素矩陣還會被重新初始化,所以還可以使用多次退火策略。一個退火循環完成后,可將溫度重置為T0′,開始新的退火循環。
設信息素的取值范圍為[τmin,τmax],則有
2.7 基于模擬退火的最大最小蟻群算法
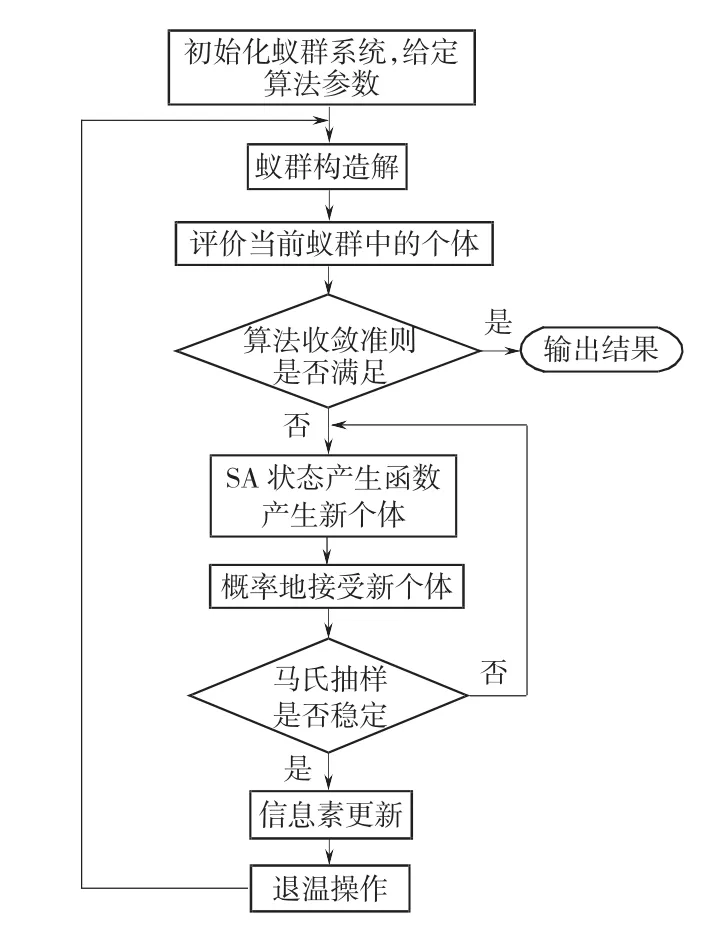
圖3 基于模擬退火的最大最小蟻群算法流程圖Fig.3 Flow process sheet of SAMMAS
基于模擬退火的最大最小蟻群算法流程圖如圖3所示。由圖3可以看出,MMAS為SA提供了一系列的初始解,使得SA的鄰域搜索能力進一步改善解,同時MMAS利用SA產生的新解再進行并行搜索。因此,基于模擬退火的最大最小蟻群算法結合了模擬退火和最大最小蟻群算法的特點,增強了這兩種算法的搜索能力,彌補了算法的弱點[10]。
3 實驗研究
基于理論分析編寫控制算法程序,在最大輸出扭矩320×103N·m的直驅式電液伺服轉葉舵機原理樣機及其加載實驗臺上進行實驗。為了驗證所提出的控制策略的有效性,需要考察系統對不同負載的補償特性和對干擾的抑制特性,以及系統的低速跟蹤特性。為此,實驗部分首先給出階躍響應實驗以驗證控制算法對不同負載的補償能力及對干擾的抑制能力,然后進行斜坡響應實驗驗證控制器的低速穩定性。實驗中,取Ts=20ms;Tf=0.5 s;n=30;ρ=0.4;α =1.5;β=1.5;p0=0.8;δ=0.7;μ =0.2。
階躍響應如圖4所示。由圖4中的曲線1和曲線2可以看出,當負載變化時,相對于Z-N法整定的PD控制器,本文所設計的控制系統具有更好的穩態精度,穩態誤差保持在±0.05°范圍內,并且調整過程變化小,上升時間也比較小,說明所設計的PD控制器具有很強的魯棒性。曲線3和曲線4的穩態誤差均超過±0.05°。

圖4 階躍響應Fig.4 Step response of system
影響直驅式電液伺服轉葉舵機的低速性能的主要因素是轉葉馬達的泄漏與非線性摩擦,具體表現為低速爬行。圖5為系統跟蹤斜率為0.01(°)/s的斜坡信號時的響應曲線。由圖5可以看出,采用Z-N法整定的PD控制器時,系統出現爬行和較大的滯后現象。采用退火蟻群尋優PD控制器時,爬行得到抑制,滯后時間也縮短到1 s以內,表明退火蟻群尋優的PD控制器能補償馬達的泄漏和抑制摩擦干擾。
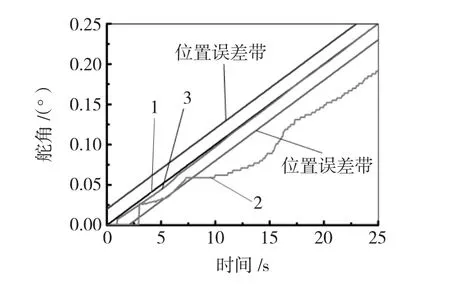
圖5 斜坡響應Fig.5 Ramp response of system
4 結語
采用基于退火策略的蟻群優化算法設計了直驅式電液伺服轉葉舵機控制參數實時整定的不完全微分PD控制器。該控制器具有最大最小螞蟻算法和模擬退火算法復合優點,具有大范圍快速全局搜索能力且求解能力高,避免螞蟻算法早熟,能滿足實時控制參數整定需求。實驗結果表明基于退火螞蟻群算法的PD控制器具有良好的動態性能和魯棒性能,能有效地提高直驅式電液伺服轉葉舵機的控制精確度。
[1]MARTINS M R,NATACCI F B.Reliability analysis of a rotary vane type steering gear system[C]//Proceedings of the Eighteenth International Offshore and Polar Engineering Conference,July 6-11,2008,Vancouver,Canada.2008:478 -483.
[2]蘇文海,姜繼海,劉慶和.直驅式電液伺服轉葉舵機系統分析及仿真[J].東北大學學報:自然科學版,2008,29(S1):244-247.SU Wenhai,JIANG Jihai,LIU Qinghe.Direct drive electric-hydraulic servo rotary vane steering gears system analysis and simulation[J].Journal of Northeastern University:Natural Science,2008,29(S1):244-247.
[3]祁聯仲.舵機液壓油污染的分析及控制[J].海軍航空工程學院學報,2006,21(6):618-622.QI Lianzhong.Analysis and control the hydraulic oil contamination of actuator[J].Journal of Naval Aeronautical Engineering Institute,2006,21(6):618-622.
[4]ANDO Keiko,MIKI Mitsunori,HIROYASU Tomoyuki.Multipoint simulated annealing with adaptive neighborhood[J].IEICE Transactions on Information and Systems E Series D,2007,90(2):457-464.
[5]LUO Yazhong,TANG Guojin.Spacecraft optimal rendezvous controller design using simulated annealing[J].Aerospace Science and Technology,2005,9(8):732 -738.
[6]DEMIREL N C,TOKSAN M D.Optimization of the quadratic assignment problem using an ant colony algorithm[J].Applied Mathematics and Computation,2006,183(1):427-435.
[7]FOX Bud,XIANG Wei,LEE Heowpueh.Industrial applications of the ant colony optimization algorithm[J].The International Journal of Advanced Manufacturing Technology,2007,31(7/8):805-814.
[8]段海濱,王道波,于秀芬.基于云模型的小生境MAX-MIN相遇蟻群算法[J].吉林大學學報:工學版,2006,36(5):803-808.DUAN Haibin,WANG Daobo,YU Xiufen.MAX-MIN meeting ant colony algorithm based on cloud model theory and niche ideology[J].Journal of Jilin University:Engineering and Technology E-dition,2006,36(5):803-808.
[9]譚冠政,李文斌.基于蟻群算法的智能人工腿最優PID控制器設計[J].中南大學學報:自然科學版,2004,35(1):91-96.TAN Guanzheng,LI Wenbin.Design of ant algorithm-based on optimal PID controller and its application to intelligent artificial leg[J].Journal of Central South University:Science and Technology,2004,35(1):91-96.
[10]馮遠靜,馮祖仁,彭勤科.智能混合優化策略及其在流水作業調度中的應用[J].西安交通大學學報,2004,38(8):779-782.FENG Yuanjing,FENG Zuren,PENG Qinke.Intelligent hybrid optimization strategy and its application to flow-shop scheduling[J].Journal of Xi’an Jiaotong University,2004,38(8):779-782.
猜你喜歡
教學考試(高考化學)(2021年2期)2021-05-30 06:15:52
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:42
中學生數理化·高一版(2020年3期)2020-04-21 08:03:20
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
小學生作文(低年級適用)(2018年9期)2018-10-08 02:29:48
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:10
數學大世界(2018年1期)2018-04-12 05:39:14
幸福(2017年18期)2018-01-03 06:34:53
中國衛生(2016年8期)2016-11-12 13:26:50