基于MRAS和SVPWM的無速度傳感器永磁同步電動機(jī)控制研究*
2010-09-20 02:56:04上海電力學(xué)院上海200090梅柏杉程曉勇
電氣自動化 2010年1期
關(guān)鍵詞:模型
上海電力學(xué)院(上海200090) 梅柏杉 程曉勇 劉 斌
蔚縣空中草原風(fēng)廠(河北 075000) 劉玉剛
1 引言
永磁同步電機(jī)因其功率密度大,效率高的優(yōu)點(diǎn),在國防、工農(nóng)業(yè)生產(chǎn)和日常生活等方面獲得越來越廣泛的應(yīng)用。由于無速度傳感器不僅可以降低成本,還可以增強(qiáng)系統(tǒng)穩(wěn)定性,所以無速度傳感器永磁同步電機(jī)的矢量控制方法,也成為研究中的一個熱點(diǎn)[1]。模型參考自適應(yīng)(MRAS)是一種較常用的估算轉(zhuǎn)子位置和速度的方法。模型參考自適應(yīng)辨識的主要思想是將含有待估計參數(shù)的方程作為可調(diào)模型,將不含未知參數(shù)的方程作為參考模型,兩個模型具有相同物理意義的
輸出量。兩個模型同時工作,并利用其輸出量的差值根據(jù)合適的自適應(yīng)率來實(shí)時調(diào)節(jié)可調(diào)模型的參數(shù),以達(dá)到控制對象的輸出跟蹤參考模型的目的[2]。根據(jù)穩(wěn)定性原理得到速度估計自適應(yīng)公式,系統(tǒng)和速度的漸進(jìn)收斂性由Popov的超穩(wěn)定性來保證。
近年來,電機(jī)的空間矢量理論被引入電機(jī)控制系統(tǒng)中,形成了空間矢量脈寬調(diào)制技術(shù)(SVPWM)。其原理就是利用逆變器各橋臂開關(guān)控制信號的不同組合,使逆變器的輸出空間電壓的矢量運(yùn)行軌跡盡可能接近圓形[3]。SVPWM能夠明顯地減小逆變器輸出電壓的諧波成分,降低轉(zhuǎn)矩脈動,而且有較高的電壓利用率,更易于數(shù)字實(shí)現(xiàn),應(yīng)用前景十分看好。
2 永磁電機(jī)的數(shù)學(xué)模型及矢量控制
PMSM把永磁體作為轉(zhuǎn)子,三相 A,B,C對稱繞組作為定子,在定子三相繞組中通以相位相差120°的三相交流電,產(chǎn)生旋轉(zhuǎn)的定子磁場,該磁場與永磁體勵磁場相互作用產(chǎn)生電磁轉(zhuǎn)矩。假設(shè)PMSM磁路為線性,忽略鐵心損耗,所有繞組產(chǎn)生的磁動勢波和磁場在空間都按正弦分布[4]。經(jīng)過推導(dǎo)后可以得到PMSM在dq坐標(biāo)系下的數(shù)學(xué)模型如下:
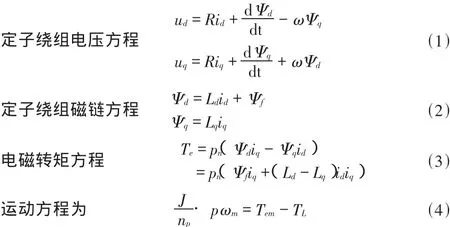
矢量控制實(shí)際上是對電動機(jī)定子電壓或電流矢量的相位和幅值同時進(jìn)行控制。對于貼面式PMSM,Ld=Lq。一般,為了簡化控制策略,采用 id=0,將此式代入電磁轉(zhuǎn)矩方程式(3),可得電磁轉(zhuǎn)矩方程為:

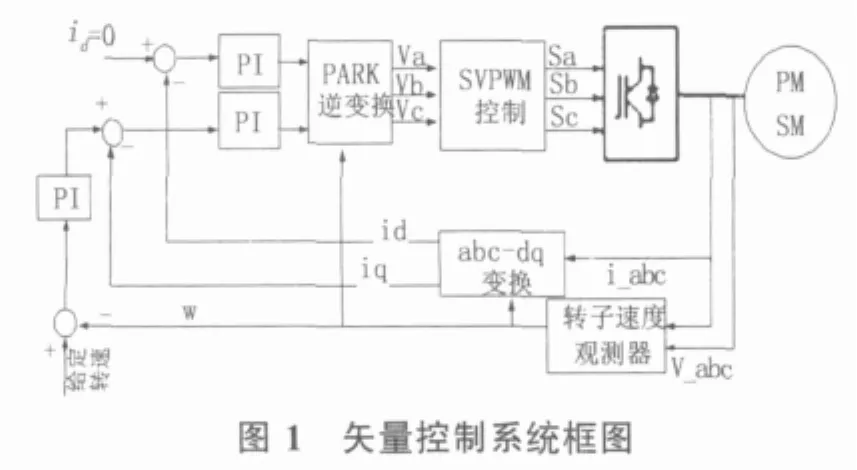
即電磁轉(zhuǎn)矩只和q軸的電流 iq有關(guān),所以在貼面式永磁同步電機(jī)的矢量控制系統(tǒng)中,令 id=0時,通過控制 iq,即可實(shí)現(xiàn)電磁轉(zhuǎn)矩的解耦控制。圖1所示為采用 id=0策略的矢量控制框圖。
通常轉(zhuǎn)子實(shí)際位置是通過編碼盤或測速發(fā)電機(jī)等位置傳感器獲取的。本文采用模型參考自適應(yīng)狀態(tài)觀測器估算轉(zhuǎn)子角度和轉(zhuǎn)速,實(shí)現(xiàn)PMSM的無速度傳感器矢量控制。
3 空間矢量PWM
空間矢量PWM(SVPWM)控制策略采用逆變器空間電壓矢量的切換以獲得準(zhǔn)圓形旋轉(zhuǎn)磁場,從而在不高的開關(guān)頻率時,提高了電壓型逆變器的電壓利用率和電機(jī)的動態(tài)響應(yīng)性能,同時還減小了電機(jī)的轉(zhuǎn)矩脈動等[5]。其關(guān)鍵在于SVPWM更加直接地控制了交流電機(jī)的旋轉(zhuǎn)磁場。
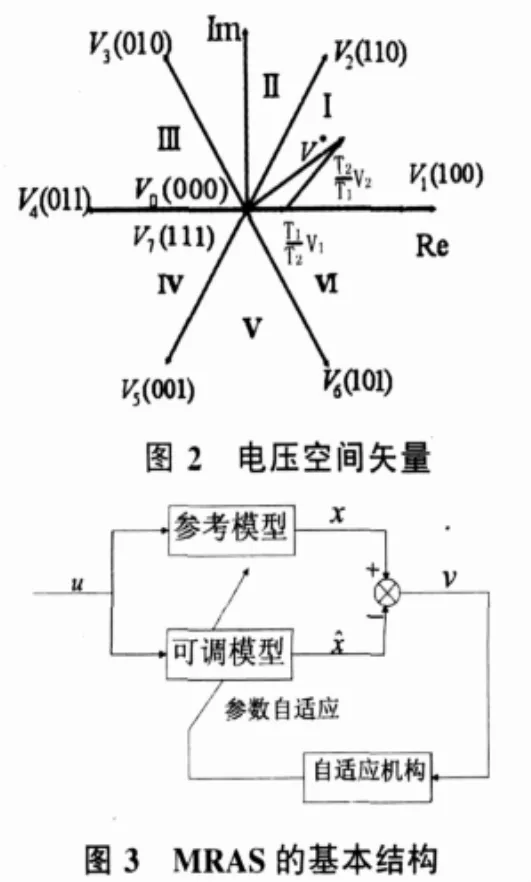
對于三相電壓型逆變器電路,每相橋臂可以看作是一個開關(guān)S,開關(guān)函數(shù) SU(t)、SV(t)、SW(t)表示三個橋臂的開關(guān)狀態(tài)。對于兩電平SVPWM逆變器,這些開關(guān)函數(shù)在任意時刻的取值為1或0。其中1表示該開關(guān)接通正電位,0表示接通負(fù)電位。根據(jù)開關(guān)函數(shù)取值的不同組合,逆變器最多有23=8種工作狀態(tài)。相應(yīng)的逆變器輸出電壓空間矢量可表示為

其中,Vdc為變頻器中間直流電壓值,a=ej120°。
對于任意給定的空間電壓矢量,都可以由這8個三相空間電壓矢量合成。利用它們的線性組合,構(gòu)成一組等幅而不等相位的電壓空間矢量,從而形成盡可能逼近圓形的旋轉(zhuǎn)磁場。由于它間接控制了電機(jī)的旋轉(zhuǎn)磁場,所以也可稱作磁鏈跟蹤控制的PWM逆變器。
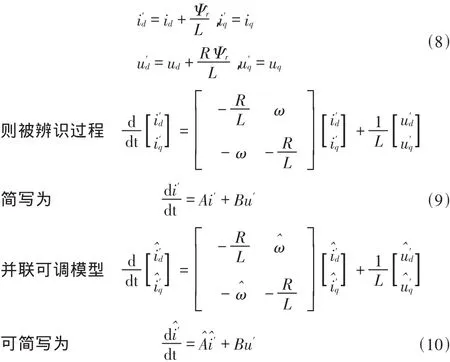
! 模型參考自適應(yīng)系統(tǒng)
MARS的主要思想是將含有待估計參數(shù)的方程作為可調(diào)模型,將不含未知參數(shù)的方程作為參考模型,兩個模型具有相同物理意義的輸出量。兩個模型同時工作,并利用其輸出量的差值,根據(jù)合適的自適應(yīng)率來實(shí)時調(diào)節(jié)可調(diào)模型的參數(shù),以達(dá)到控制對象的輸出跟蹤參考模型的目的[6]。根據(jù)穩(wěn)定性原理得到速度估計自適應(yīng)公式,系統(tǒng)和速度的漸近收斂性由Popov的超穩(wěn)定性來保證。
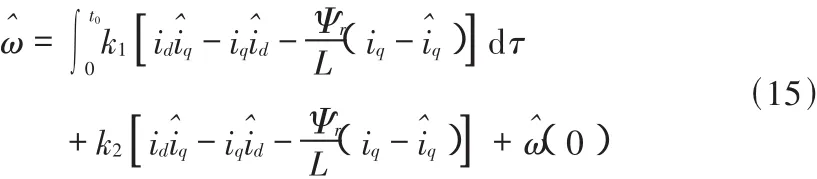
根據(jù)所得電機(jī)數(shù)學(xué)模型,可以看出電流模型與電機(jī)的轉(zhuǎn)速有關(guān),因此可選PMSM本身作為參考模型,而電流模型為可調(diào)模型,采用并聯(lián)型結(jié)構(gòu)辨識轉(zhuǎn)速。
PMSM在dq軸下的定子電流數(shù)學(xué)模型為
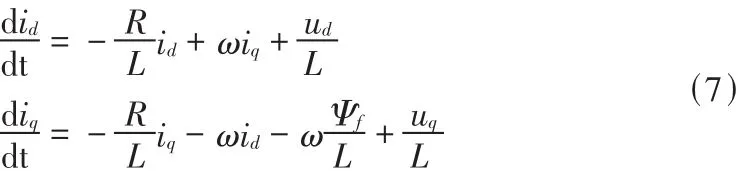
為便于分析系統(tǒng)穩(wěn)定性,應(yīng)使轉(zhuǎn)速量被約束于系統(tǒng)矩陣A中,因此對控制量和狀態(tài)變量作相應(yīng)變換,得
其中并聯(lián)可調(diào)模型中 ω是需要辨識的量,而其它參數(shù)不變化。狀態(tài)變量誤差

首先將并聯(lián)模型狀態(tài)方程改寫為以下形式

取 D=I,則 v=Ie=e。
根據(jù)Popov超穩(wěn)定性定理,如果滿足:
1)傳遞陣 H(s)=D(sI-A)-1為嚴(yán)格正實(shí)矩陣;
2)η(0,t0)= ∫0t0vTwdt≥ - γ0,?t0≥0,γ0為任一有限正數(shù)。
可得辨識算法為

其中,k1,k2≥0,將式(8)代入式(14)可得
?
5 仿真和結(jié)果
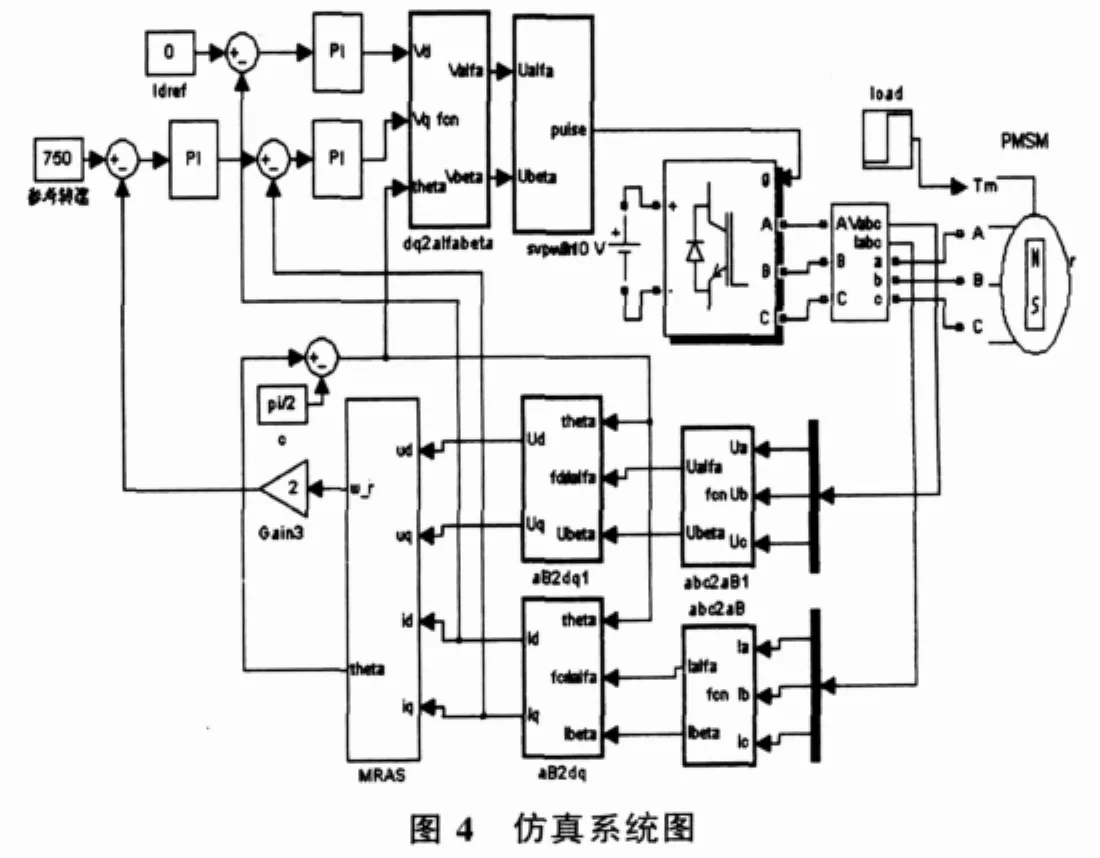
如下圖4基于MARS永磁同步電機(jī)無速度傳感器SVPWM仿真系統(tǒng)圖。
速度環(huán)PI參數(shù)取Ki1=0.5,Kp1=1;電流環(huán)Ki2=10,Kp2=1。模型參考自適應(yīng)系統(tǒng)中,PI調(diào)節(jié)中經(jīng)過調(diào)試確定下來 Ki=100、Kp=0.001,可以得到對轉(zhuǎn)速的估計值。
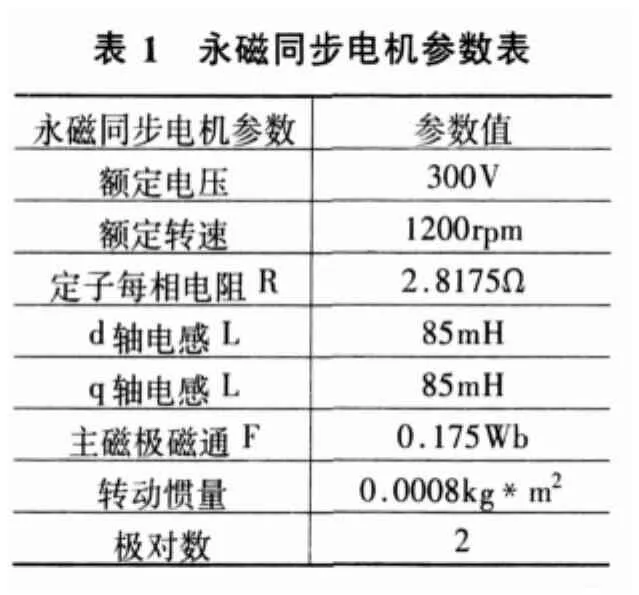
仿真中使用的永磁同步電機(jī)參數(shù)見表1。
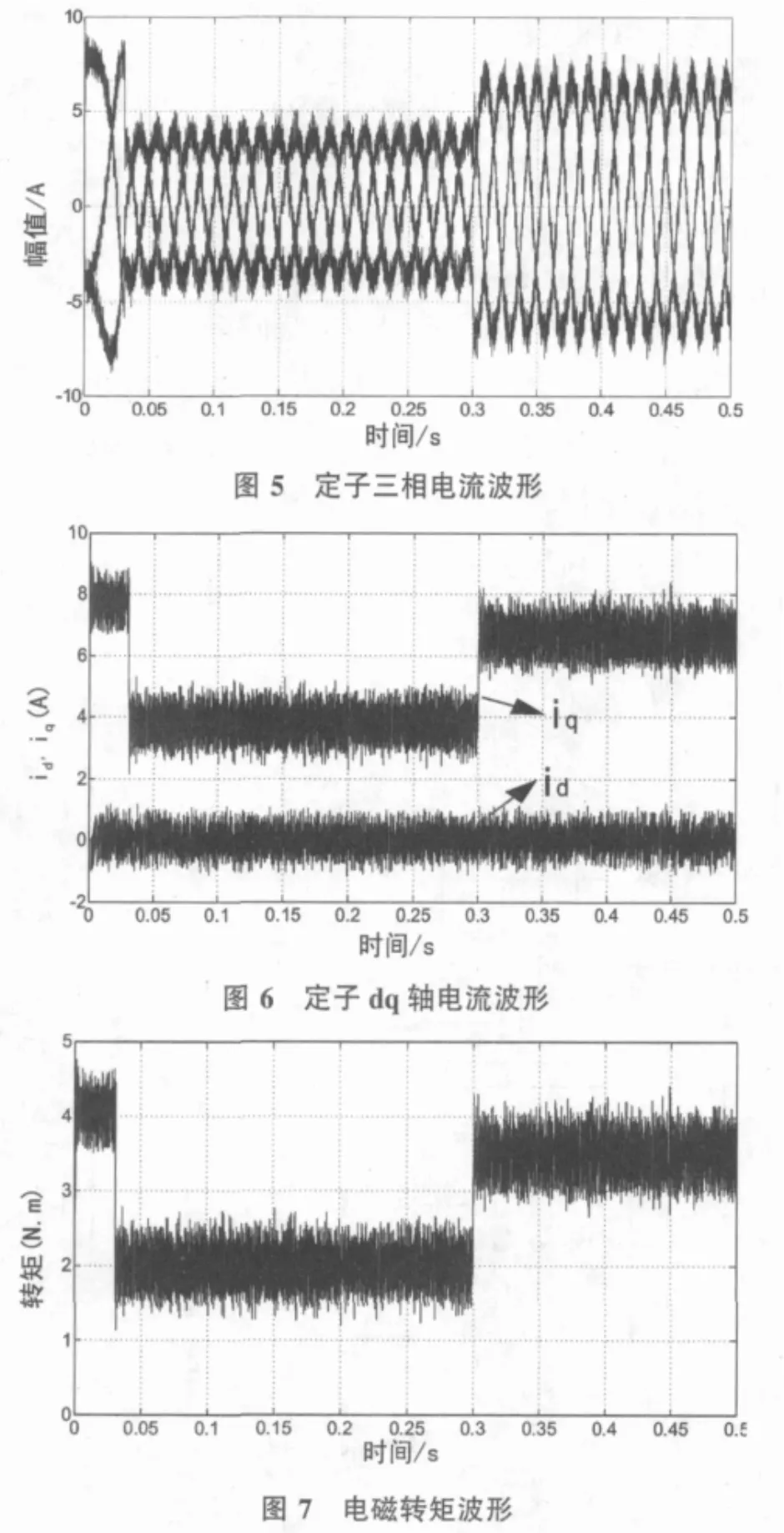
負(fù)載轉(zhuǎn)矩 T為2N·m,在0.3秒加負(fù)載擾動為3.5N·m,仿真結(jié)果如下:
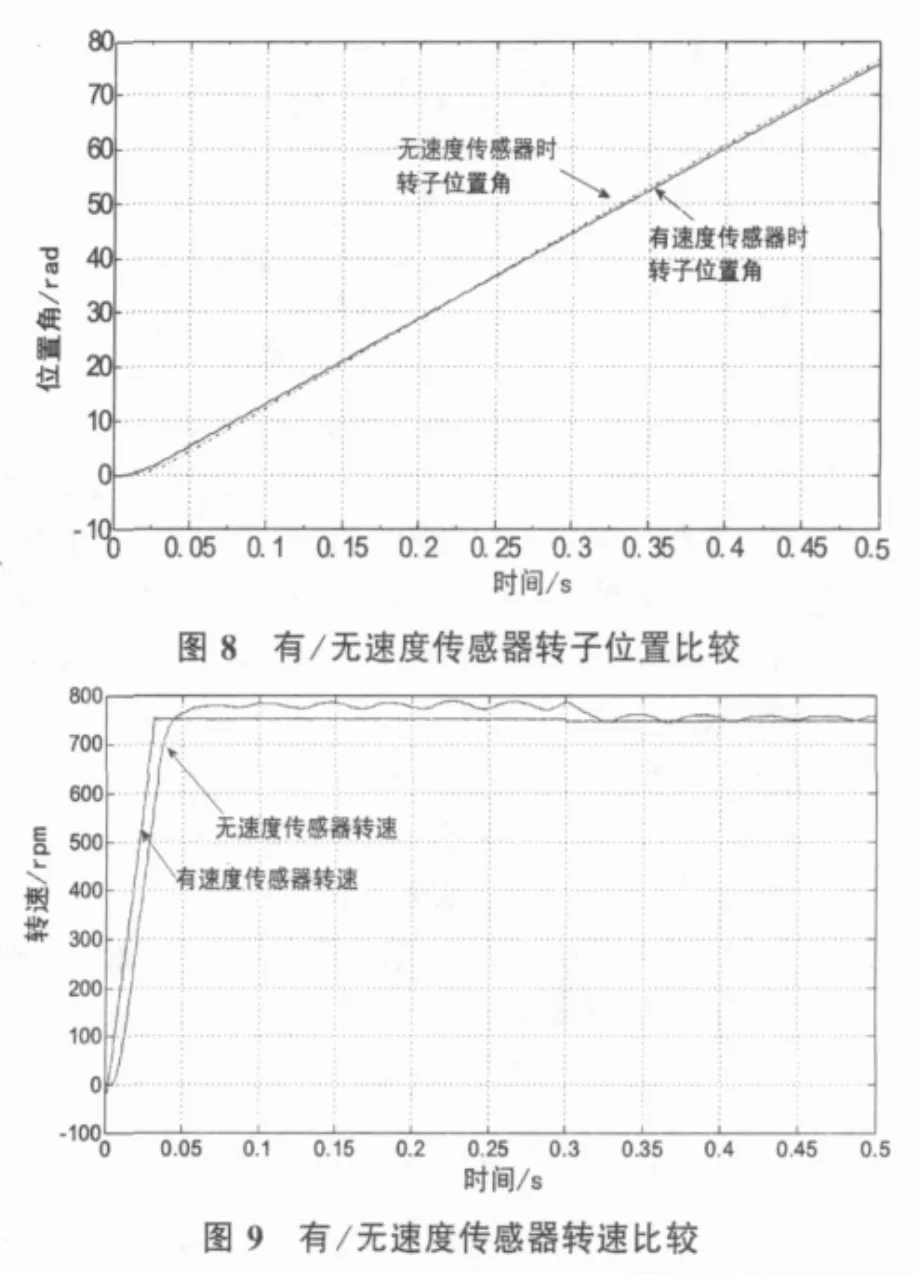
由圖5和圖6可知,模型自適應(yīng)速度觀測系統(tǒng)能夠準(zhǔn)確觀測轉(zhuǎn)子位置和轉(zhuǎn)速,具有較好的抗擾動能力,但是MRAS辨識過程具有一定的時間延遲,并且在低速狀態(tài)下會出現(xiàn)小的波動,這也是模型參考自適應(yīng)系統(tǒng)還有待解決的問題。
6 結(jié)論
本文將模型參考自適應(yīng)觀測器和空間矢量脈寬調(diào)制技術(shù)應(yīng)用于永磁同步電機(jī)無速度傳感器矢量控制中。根據(jù)永磁同步電機(jī)的數(shù)學(xué)模型,設(shè)計了一個可調(diào)狀態(tài)觀測模型用于對永磁同步電機(jī)轉(zhuǎn)子位置和速度估算,建立其自適應(yīng)規(guī)律,并根據(jù)Popov漸進(jìn)收斂性理論進(jìn)行了設(shè)計穩(wěn)定性。該方法以PMSM電機(jī)本身作為參考模型,電流模型作為可調(diào)模型,采用并聯(lián)型結(jié)構(gòu)辨識轉(zhuǎn)速,可以在較寬的速度范圍內(nèi)觀測轉(zhuǎn)速和轉(zhuǎn)子位置,對系統(tǒng)的抗擾動能力具有較強(qiáng)的魯棒性,并采用空間矢量脈寬調(diào)制技術(shù)減小轉(zhuǎn)矩脈動。仿真結(jié)果表明,模型參考自適應(yīng)狀態(tài)觀測器能夠在較高轉(zhuǎn)速范圍內(nèi)追蹤實(shí)際信號,實(shí)現(xiàn)對轉(zhuǎn)子速度的觀測,從而實(shí)現(xiàn)了無速度傳感器磁場定向控制。
[1]王宏,于泳,徐殿國.永磁同步電動機(jī)位置伺服系統(tǒng)[J].中國電機(jī)工程學(xué)報,2004:151~155.
[2]王成元,郭慶鼎.矢量控制交流伺服驅(qū)動電動機(jī)[M].北京:機(jī)械工出版社,1994.
[3]鄭萍,王明渝.感應(yīng)電機(jī)無速度傳感器矢量控制的速度估算器研究[J].電工技術(shù)學(xué)報,2001,16(5):24~29.
[4]Minghua Fu,Longya Xu.A Novel Sensor-less Control Technique for Permanent Magnet Synchronous Motor Using Digital Signal Processor(DSP).IEEE Aero space and Electronics Conference,1997,(1):403~408.
[5]賈洪平,孫丹,賀益康.基于滑模變結(jié)構(gòu)的永磁同步電機(jī)直接轉(zhuǎn)矩控制[J].中國電機(jī)工程學(xué)報,2006,26:134~138.
[6]Low TS,Lee TH,Chang KT.A Nonlinear Speed Observer for Permanent2 magnet Synchronous Motors.IEEE Trans Ind.1993,40(3):307 ~316.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19