鉆井平臺的鉆桿排放方式及其自動化操作系統
2010-09-09 01:46:02劉平全崔學政
中國海洋平臺 2010年1期
關鍵詞:系統
劉平全, 崔學政, 董 磊
(中國石油大學(華東),東營 257061)
鉆井平臺的鉆桿排放方式及其自動化操作系統
劉平全, 崔學政, 董 磊
(中國石油大學(華東),東營 257061)
對比了鉆井平臺的兩種鉆桿排放方式,并介紹了國外典型的自動化鉆桿操作系統,以期為國內鉆桿操作系統的研究提供幫助。
鉆井平臺;鉆桿操作系統
Abstract:Comparison on two different drill pipe treatment methods of drilling platforms,and some foreign typical drill pipe automatic handling systems are introduced in this paper,which will be helpful to domestic research.
Key words:drilling platform;drill pipe handling system
鑒于對油氣資源的需求,各國已將注意力逐漸轉向深海。隨著作業(yè)水深的增加,鉆井所需的鉆桿數量相應增加,鉆井作業(yè)時間和作業(yè)費用隨之也相應增加。傳統鉆桿操作方法現已無法解決所遇問題,唯采用機械化、自動化鉆桿操作系統,才能解決之。
1 鉆桿排放方式分析對比
1.1 鉆桿存放形式分析對比
目前,鉆井平臺上采用的鉆桿存放形式主要有立式和臥式兩種[2]。
立式存放:將鉆桿立根排放在鉆臺上的立根盒內,靠在井架的指梁上。其優(yōu)點是起下鉆速度快,鉆井過程中效率高,占用面積小;缺點是井架承載嚴重,風浪較大時,穩(wěn)定性差。
臥式存放:將鉆桿水平排放在甲板上。其優(yōu)點是設備重心低,鉆井平臺穩(wěn)定性提高,井架承載情況改善;缺點是排放架占用面積大。
1.2 鉆桿操作過程分析對比
1.2.1 傳統鉆桿操作過程分析
當鉆井平臺在指定位置開始鉆井時,需要人工將甲板鉆桿排放架上的鉆桿水平移至貓道,鉆臺上的小絞車下放鋼絲繩,利用索具等工具將鉆桿沿坡道拉上鉆臺。然后,利用吊卡、旋扣工具、在鼠洞內將鉆桿連接成立根,放入立根盒存儲以備使用。
在鉆進過程中隨著井深的增加,需要不斷地將立根從立根盒移至井口連接到鉆柱上;更換鉆頭或安裝測試工具及其他鉆柱底部工具時,又要不斷地將立根從鉆柱上取下移至立根盒或從立根盒將立根移至井口連接到鉆柱上,即進行起、下鉆操作。當鉆完一口井后,又需要將立根從鉆柱上逐根取下,利用小絞車掛住立根頂端將立根甩下,然后水平移至甲板的鉆桿排放架上。
傳統的操作方式需要工作人員與鉆桿直接接觸,在起、下鉆過程中需要司鉆、鉆工、井架工等人的密切配合,稍有不慎便可能造成事故。移動鉆桿立根時,需要二層臺上的井架工伸手到井口中心位置將立根接到游車上(或拆下來),并且還需要不斷在指梁與井口中心之間移動立根,這是鉆機上最危險的工作之一,且工作強度大,生產效率低。
1.2.2 自動化鉆桿操作過程是指采用自動化鉆桿操作系統代替人工來完成上述的鉆桿操作過程。開始鉆井時,甲板起重設備將水平放置在甲板鉆桿排放架上的鉆桿起升、并移送至鉆桿傳送設備上,經傳送后至鉆臺入口處。然后,位于鉆臺入口處的水平/垂直鉆桿轉換系統將鉆桿傳送設備上的鉆桿提起,并將其由水平狀態(tài)轉換至垂直狀態(tài),放入動力鼠洞或交給垂直鉆桿操作系統進行單根接成立根操作。單根接成立根操作是由垂直鉆桿操作系統、水平/垂直鉆桿轉換系統、動力鼠洞以及鐵鉆工配合完成的,然后由垂直鉆桿操作系統將立根送入立根盒存儲以備使用或直接送往井口。在鉆進以及起、下鉆過程中,由垂直鉆桿操作系統在井口與立根盒之間往返移送立根,以保證鉆井作業(yè)的正常進行。當鉆完一口井準備移井位時,根據相關要求,可以由上述自動化鉆桿操作設備按反向程序,將立根送回至甲板排放架上,至此,完成了整個鉆桿的自動化操作循環(huán)過程。
在自動化鉆桿操作過程中,不需要工作人員與鉆桿的直接接觸,所有的操作均可通過遙控來實現,鉆井效率明顯提高,減輕了工作人員的勞動強度,提高了鉆井作業(yè)的安全性。此外,自動化鉆桿操作系統還具備離線單根接成立根的功能,可以在鉆井作業(yè)的同時進行接立根操作,這是提高鉆井效率的一個重要因素。
2 自動化鉆桿操作系統
19世紀40年代 Humble oil公司和Byron Jackson公司就聯合研制了半自動化鉆桿操作系統,它必須由司鉆和井架工共同操作。1973年,全自動化鉆桿排放系統首次安裝到挪威Smedvig West Venture半潛式鉆井平臺[3]上。迄今為止,國外在鉆桿自動操作系統方面取得了較為顯著的成果,已經形成了一系列完善設備。目前,在鉆桿自動化操作系統方面具有世界領先水平的是National oilwell Varco公司和Aker Kvaerner MH公司,下面將結合這兩個公司的產品對自動化鉆桿操作系統進行描述。
依照立式鉆桿排放方案,自動化鉆桿操作系統根據其所處理的鉆桿的空間位置可分為:水平鉆桿操作系統、垂直鉆桿操作系統和水平/垂直鉆桿轉換系統。
2.1 水平鉆桿操作系統
水平鉆桿操作系統又稱為鉆桿傳送系統,其主要作用是在鉆臺和甲板之間進行鉆桿及其他管具的傳送,主要由甲板起重設備與鉆桿傳送設備兩部分組成。
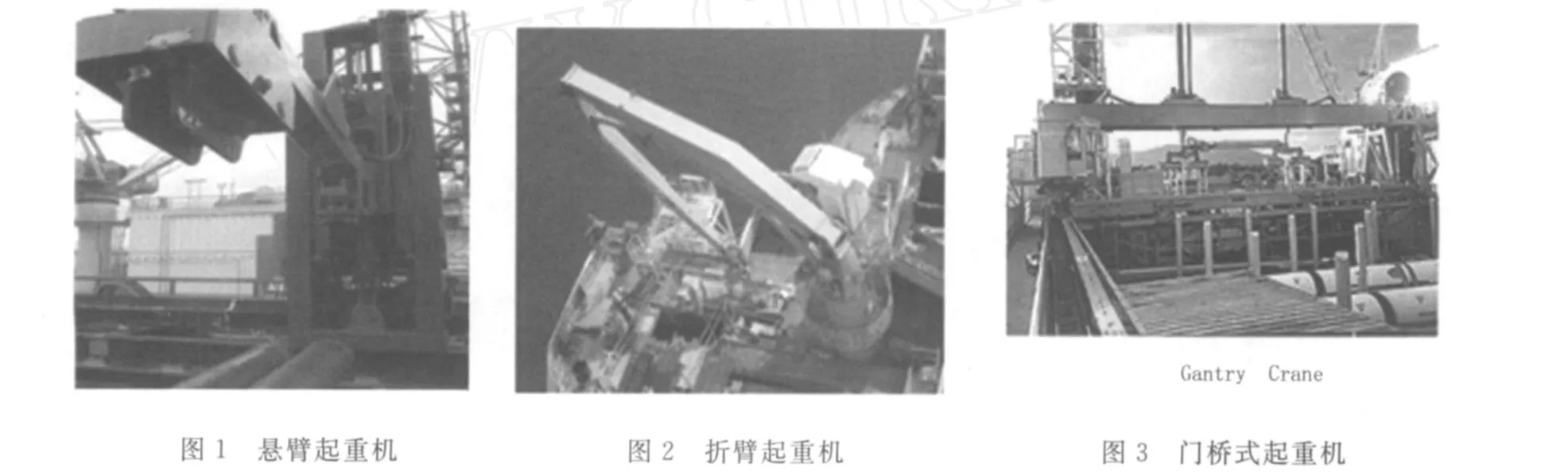
2.1.1 甲板起重設備的作用是將甲板上的鉆桿移送至鉆桿傳送設備上,或反向操作,按其結構形式分為3種類型:懸臂起重機、折臂起重機和門橋式起重機。
懸臂起重機(如圖1所示)主要由主體部分、懸臂裝置和機械手等構成。起重機本體可以沿著軌道做水平移動,舉升裝置可以帶著懸臂垂直上下移動,懸臂可以做一定角度的傾斜。除此之外,為方便對鉆桿的抓取,懸臂還可以自由伸縮一定距離。這種起重機結構簡單、安裝方便,但只能沿著軌道一次傳送一根鉆桿。由于自身結構限制,其舉升高度一般較低,多用于近海作業(yè)的鉆井平臺。
折臂起重機是目前在國外應用較多的一種甲板起重設備,典型的有Varco公司的Pipe Handling Crane和MH公司的 Pipedeck Pipehander。折臂起重機(如圖2所示)的塔身可以繞其自身軸線旋轉,各關節(jié)臂可以繞鉸接軸做一定角度的轉動,末端回轉裝置可以繞其軸線轉動,通過對塔身、關節(jié)臂以及末端回轉裝置等機構的調整可以實現對末端夾持機構的精確定位。該起重機塔身固定在甲板上,對安裝的定位精度要求相對較低,工作時不需要沿甲板做平面移動,因此產生的動載荷相對較小。折臂起重機具有一定的冗余自由度,可以靈活地進行鉆桿的移送操作。
門橋式起重機是在通用型門橋類起重機的基礎上進行了一系列的改進,用來滿足平臺鉆桿操作的要求。Varco公司的Riser Gantry Crane/Gantry Crane(如圖3所示)和 MH公司的 Gantry Crane都屬于這類起重機。在鉆井平臺甲板上安裝起重機的行走軌道并在軌道上安裝齒條機構,起重機的兩腿上安裝有滾輪和齒輪。滾輪只承受壓力負荷而不具有驅動的功能,通過液壓馬達驅動腿上的齒輪與軌道上的齒條嚙合來實現起重機的整體移動。為防止抓取作業(yè)時產生擺動,機械手與導桿連接,通過絞車鋼絲繩機構控制導桿的上下移動。起重機通過大車行走機構的平面移動、小車行走機構的平面移動、提升機構的垂直上下直線運動,來實現 XYZ三坐標定位功能[4]。該起重機的機械結構簡單,設計思路成熟,容易實現自動化定位;其工作范圍較大,工作只受軌道行程的限制和起重機跨度的限制。
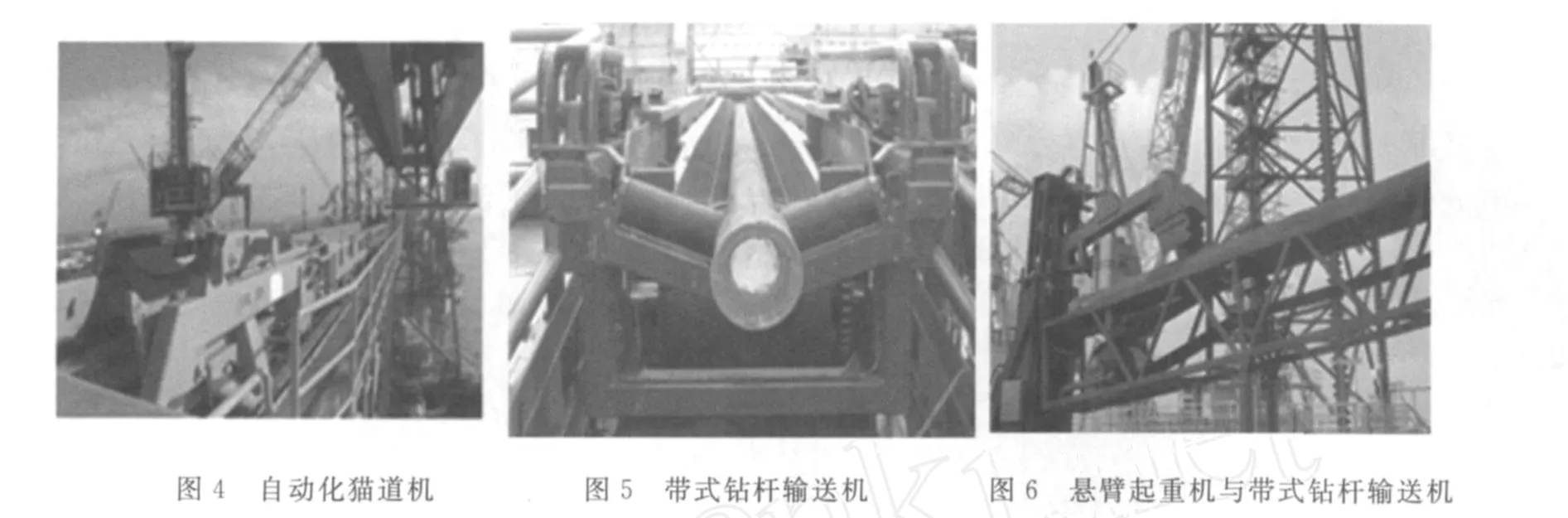
2.1.2 鉆桿傳送設備 自動化貓道機是鉆桿和其他相關管具的傳送設備,可以在鉆臺和甲板之間安全可靠地往返傳送鉆桿(如圖4所示)。該系統由貓道機本體、鎖車機構、尾部起升機構等組成。工作時,鉆桿水平放置到貓道機上,貓道機本體沿著導軌向鉆臺行進,到達預定位置后通過鎖車機構和尾部起升機構以及水平/垂直轉換系統的配合將鉆桿從貓道機上移出。貓道機的尾部(臨近鉆臺一端)安裝有附屬的引導設備,可用于引導鉆桿對準鼠洞或井口。
自動化貓道機的主要特點是可靠性高、適應性強,可以在多種平臺上使用,是目前國外應用較多的自動化鉆桿傳送設備。貓道機與折臂起重機配合的這種鉆桿傳送系統在國外被廣泛應用,并在我國的海洋石油941自升式鉆井平臺上進行了成功的運用。
帶式鉆桿輸送機(如圖5所示)是Varco公司生產的一種鉆桿傳送設備,其功能與貓道機相似。該系統使用一種防油污的多層橡膠帶來實現鉆桿的水平傳送,在輸送機的尾部安裝有一個驅動滾筒(如圖5所示),另一端安裝有一個張緊筒。通過液壓馬達帶動驅動滾筒旋轉,從而使傳送帶運行,以實現鉆桿的傳送。該設備優(yōu)點是結構簡單,可以快速連續(xù)地傳遞鉆桿,并且輸送帶在工作過程中會對鉆桿起到很好的保護作用,不需要安裝鉆桿護絲;缺點是,風過大時,會出現鉆桿從傳送帶滾落的現象,其工作時允許最大風速為20.56 m/s。由于這種傳送設備結構相對簡單獨立,所以可用來對現有鉆臺進行改造。帶式鉆桿輸送機常與懸臂起重機配合,使用起來輕巧而靈便(如圖6所示)。
2.2 水平/垂直鉆桿轉換系統
水平/垂直鉆桿轉換系統安裝在鉆臺入口處,其主要作用是將在其下方水平放置的鉆桿提起并轉換成垂直狀態(tài),或反向操作。此外,還可以輔助垂直鉆桿操作系統完成單根接立根操作或獨立完成單根接立根操作。目前比較典型的水平/垂直鉆桿轉換系統有 Varco公司的 V-Door Machine、Stand Hand II、Pipe Laydown System以及MH公司的Eagle/Eagle Light等。各種設備的結構形式不同,但基本功能都是作為水平鉆桿操作系統與垂直鉆桿操作系統的銜接裝置使用。
V-Door Machine(如圖7所示)安裝在井架的V形門處,其最大舉升行程可達27 m。該系統的特點是:與動力鼠洞和鉆桿傳送設備尾部的引導機構配合,即可完成單根接立根操作,并可以在井口和鉆桿傳送設備
之間往返移送鉆桿,而不需要鉆桿排放系統的涉及。
Pipe Laydown System(如圖8所示)是一種在自動化鉆井平臺上應用較多的水平/垂直鉆桿轉換系統,具有PLS-3、PLS-5等類型。該系統主要功能是進行鉆桿的水平/垂直轉換,以及協助垂直鉆桿操作系統進行離線單根接立根操作。
Eagle/eagle light兩種系統采用機器人控制原理實現其對運動的控制,屬于全自動化處理設備。其中eagle系統最大伸出范圍可達11 m,并具有接立根的功能,如圖9所示。

圖7 VDM系統

圖8 PLS系統
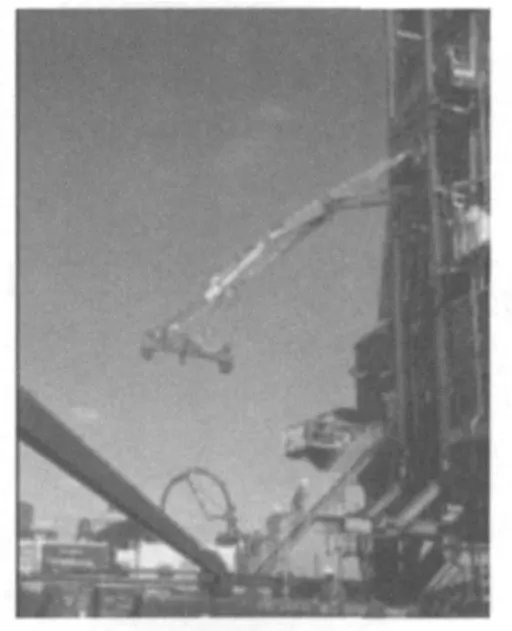
圖9 Eagle系統
2.3 垂直鉆桿操作系統
垂直鉆桿操作系統又稱鉆桿排放系統,其功能是在鉆臺上對鉆桿或其他管具進行操作,主要包括在井口與立根盒之間移送鉆桿立根、鉆桿單根連接成立根等操作。按其結構形式和工作原理可分為柱形排放系統、橋式排放系統、機械手式排放系統。
2.3.1 橋式排放系統
Varco公司的Bridge Racker系列和MH公司的Bridge Crane System(如圖10所示)都是這種類型。這種類型的排放設備結構相似,基本具有四個自由度,橫梁的兩端可以在支撐架的軌道上平行移動,中間垂直柱形結構可以隨著小車在橫梁上做直線移動,柱形結構可以繞自身軸線做回轉運動,機械手可以沿柱形結構上下移動。橫梁的支撐導軌一般安裝在井架上,因此工作時會對井架產生一定動載荷。其主要功能是在井口與立根盒之間進行立根的移送,這種排放系統一般不具備離線接立根的功能。為防止在移送過程中立根下部產生擺動,通常在鉆臺上安裝一個機械手式操作系統控制立根的下部,與橋式操作系統配合使用。
2.3.2 機械手式排放系統是將不同類型的機械手安裝在鉆臺、二層臺以及井架上等位置,通過系統的平面移動或機械手的伸縮功能來實現鉆桿的移送。Varco公司的Compact Racker、Racking Lift Arm、Racking Guide Arm、Z-back Arm,MH公司的2-Arm System等都是這種類型。Varco公司的Compact Racker(如圖11所示)是采用機器人控制原理實現對其機械手運動的精確控制,來達到準確移動鉆桿的目的。MH公司的2-Arm System(如圖12所示)是將上下兩個機械手分別安裝到二層臺和鉆臺上,通過兩個機械手的配合來實現立根在井口和立根盒之間的移送。機械手式排放系統既可以作為輔助設備與其他排放系統配合使用,也可以單獨進行鉆桿的操作。由于系統結構比較簡單,安裝也相對簡單,除了可以作為自動化鉆井平臺的鉆桿操作系統,還可以用來對現有的一些平臺進行改造。
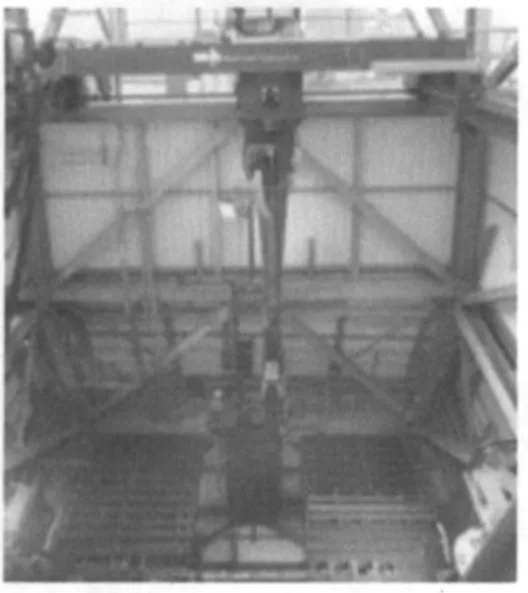
圖10 橋式排放系統
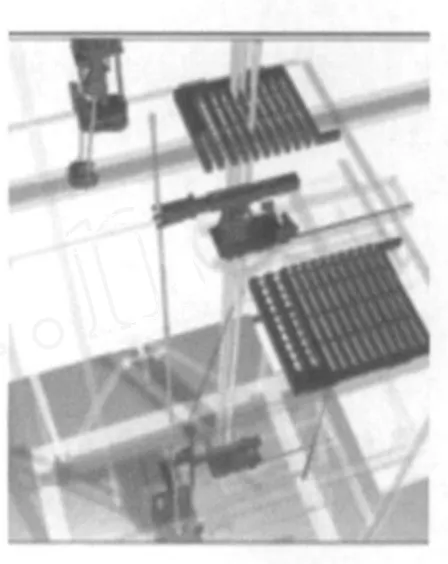
圖11 Compact Racker排放系統
2.3.3 柱形排放系統的結構特征是將兩個或多個機械手安裝在一個獨立支撐的柱形結構上,這種排放系統功能比較強大,適合在多種鉆井平臺上作業(yè)。Varco公司的 HydraRacker、Star Racker、Pipe Handling Machine、Pipe Racking System以及MH公司的Pipe Racking Machine都是這種類型。
Star Racker的特點是其具有一種星形結構的立根盒,不同于X-Y型和平行型,這種結構的立根盒不需要立根鎖定機構,結構簡單;該系統不能在鉆臺上移動,通過轉動和機械手的伸縮來實現立根的移送,如圖13所示。
Pipe Racking System(如圖14所示)是一種應用較多并且比較成熟的一種鉆桿排放系統,它經歷了PRS-3i、PRS-4i、PRS-5、PRS-6i、PRS-8、PRS-8i等多種型號的發(fā)展 ,該系統可以在鉆臺上沿軌道移動 ,并且具有離線單根接成立根功能。PRS系統與 PLS系統相互配合可以實現鉆臺上鉆桿的全自動化處理,在Transocean Sedco Forex的超深水鉆井船“Discoverer Enterprise”上得到成功運用[5]。
Pipe Racking Machine具有兩種工作模式。當系統處于水平/垂直模式(如圖15(a)所示)的時候具有水平/垂直鉆桿轉換系統的功能,可以實現鉆桿由水平狀態(tài)向垂直狀態(tài)的轉換;處于垂直模式(如圖15(b)所示)的時候可以進行立根的垂直移送操作,該系統同樣具備離線單根接立根的功能。
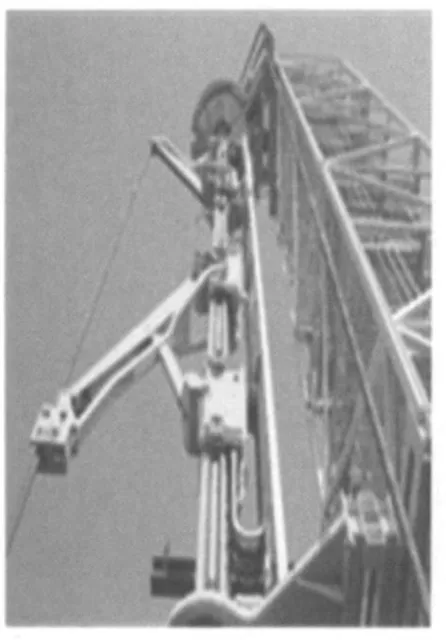
圖13 SR排放系統
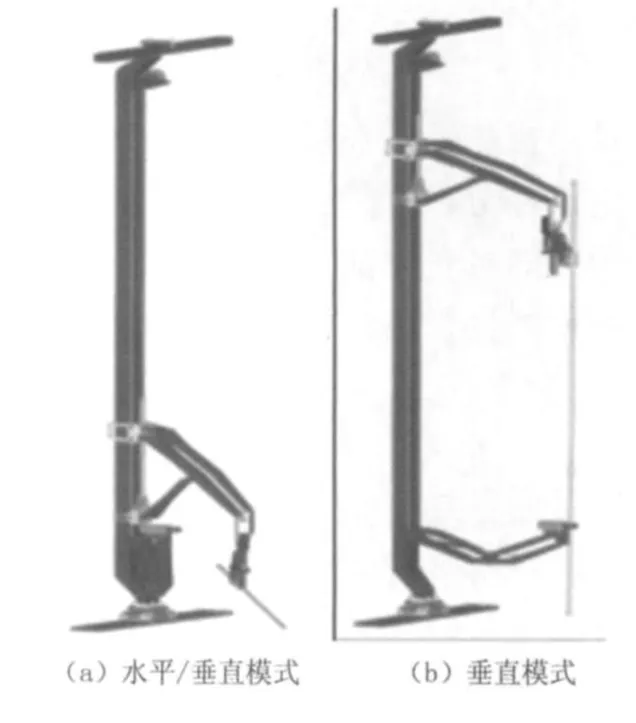
圖14 PRS排放系統
柱形排放系統多用于新型的自動化鉆井平臺或鉆井船上,作為鉆桿等的自動化排放設備使用,相對于其他排放系統,具有很多優(yōu)點:柱形排放系統結構獨立,工作時不會對井架等設備產生附加載荷;大多數柱形排放系統可以在鉆臺上面移動,作業(yè)范圍大、功能強,部分柱形排放系統兼具水平/垂直鉆桿轉換系統的功能;多數柱形排放系統可與水平/垂直轉換系統配合來完成離線單根接立根的操作,提高了工作效率。
鉆桿操作系統是否具有離線單根接成立根功能是衡量其自動化程度以及工作效率的一個重要因素。如果垂直鉆桿操作系統是一種具有單根接立根功能的柱形系統如 PRS、PRM等,則相應的水平/垂直鉆桿轉換系統就不需要具有單根接立根能力,只起到輔助作用;如果垂直鉆桿操作系統本身不具備離線單根接立根功能,則相應的水平/垂直鉆桿轉換系統是否具有單根接立根功能就顯得十分重要。
2.4 “海洋石油941”鉆井平臺的鉆桿操作系統
“海洋石油941”是大連船舶重工集團為中海油服建造的用于海上石油和天然氣勘探、開采作業(yè)的自升式鉆井平臺,這也是我國第一座JU2 000型自升式鉆井平臺,最大作業(yè)水深121.92 m,最大鉆井深度9 144 m。
“海洋石油941”上配備了Varco公司的自動化鉆桿操作系統,主要包括在甲板和鉆臺之間往返傳送鉆桿的折臂起重機、自動化貓道機(如圖16所示)以及在鉆臺上進行鉆桿排放操作的 HR(HydraRacker)柱形排放系統(如圖17所示),此外,還配備有用來進行鉆桿上卸扣操作的鐵鉆工(如圖18所示)。該鉆井平臺于2006年9月11日下水作業(yè),隨著總鉆井深度的不斷累積,其自動化鉆桿操作系統的優(yōu)越性得到了充分體現。該鉆桿自動操作系統能夠實現平臺上鉆桿的起、運、卸、排等一系列機械化操作,明顯提高了工作安全性以及降低了工作人員的勞動強度,采用自動化鉆桿操作系統也是“海洋石油941”作業(yè)效率較高的一個重要因素。該系統在“海洋石油941”上的成功運用為我國海洋鉆井的鉆桿自動化操作開創(chuàng)了先河,也為研究和發(fā)展我們自己的鉆桿自動操作系統積累了寶貴的經驗。
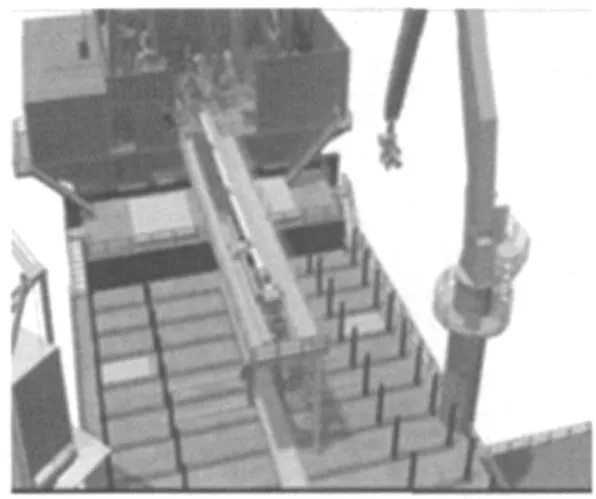
圖16 折臂起重機和自動化貓
圖17 HR鉆桿排放系統

圖18 鐵鉆工
3 結束語
鉆桿自動操作系統在國內作為一新興項目,與其相關的研究工作才剛剛起步。該系統是自動化鉆井平臺的重要組成部分,其作用直接影響到作業(yè)的效率、工作的安全等,因此,應予以重視和推廣。自動化鉆桿操作系統在國外經過長期的研究和應用,其技術相對成熟,其設計經驗也是值得我們借鑒的,因此,充分了解國外各種鉆桿自動操作系統的特點、基本類型等,對我們的研究和設計工作有很大的幫助。
[1] 劉文慶,崔學政,張富強.鉆桿自動排放系統的發(fā)展及典型結構[J].石油礦場機械,2007,36(11):74-77.
[2] 華東石油學院礦機教研室.石油鉆采機械[M].北京:石油工業(yè)出版社,1980.
[3] Gluch D P.Automation:An Evolution in Drilling Technology[J].Drilling,1986,47(3):24-30.
[4] 姜鳴,曹言悌,周聲強.陸地鉆機鉆桿自動排放系統的設計方案[J].石油機械,2008,36(8):95-98.
[5] Woelfel S R.Breakthroughs in Casing Running Efficiency Utilizing Modern Pipe Handling Technology[J].SPE/IADC Drilling Conference,2001.
Treatment Methods and Automatic Handling Systems of Drill Pipe for Drilling Platforms
LIU Ping-quan, CUI Xue-zheng, DONG Lei
(China University of Petroleum(Huadong),Dongying 257061,China)
TE928
A
1001-4500(2010)01-0051-06
2009-05-01; 修改稿收到日期:2009-08-13
國家高技術研究發(fā)展計劃(八六三計劃);“深水半潛式鉆井船設計與建造關鍵技術”(2006AA09A104)項目支持
劉平全(1985-),男,碩士研究生,主要從事海洋鉆井平臺的鉆桿自動排放系統設計研究。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
