氬弧焊機控制系統的抗干擾研究
2010-09-06 04:02:32張金柏吳曉光李宇
武漢紡織大學學報 2010年1期
張金柏,吳曉光*,李宇
(1.武漢科技學院 機電工程學院,湖北 武漢 430073;2.武漢科技學院 電信工程學院,湖北 武漢 430073)
氬弧焊機控制系統的抗干擾研究
張金柏1,吳曉光1*,李宇2
(1.武漢科技學院 機電工程學院,湖北 武漢 430073;2.武漢科技學院 電信工程學院,湖北 武漢 430073)
隨著單片機在工業生產中的廣泛應用,對其可靠性要求也越來越高。由于單片機控制系統必須具有較高的靈敏度,因此抗干擾技術己成為的單片機控制系統設計時必須考慮的環節。分析了氬弧焊接機床的單片機控制系統干擾的主要來源,從硬件(主動式抗干擾)和軟件(被動式抗干擾)兩個方而進行了抗干擾設計,得到了在復雜工作環境條件下穩定地、可靠地運行單片機實時控制系統,解決了強電磁環境對單片機系統的干擾難題。
單片機控制系統;干擾源;抗干擾
1 引言
單片機由于具有價格低、可靠性高和面向控制的特點,在檢測、控制系統中得到廣泛應用,幾乎滲透到各個行業和領域。單片機組成的控制系統必須具有較高的靈敏度,但是,靈敏度越高,越容易把干擾引入系統中。在實際應用中,在實驗室里設計的控制系統,在安裝、調試后是完全符合設計要求;可是,一旦把系統引入現場后,系統往往不能夠正常穩定地工作,其原因在于,強噪聲淹沒了被測信號,使測量無法進行。所以單片機應用系統的抗干擾設計是系統設計的重要內容之一,抗干擾性能的高低將決定系統能否在復雜環境下,尤其是在各種實時控制的遠距離系統中穩定、可靠地工作。
在焊接現場的工作環境中,往往存在多種干擾源,其中最主要的是焊接電源工作時產生的強電磁場干擾。各種干擾源以一種或者多種方式作用于焊接機床的計算機測控系統,對單片機系統產生強烈的干擾,使得系統的性能指標偏離設計要求,最終導致錯誤的結果。因此,測控系統的抗干擾性能是系統可靠性的重要指標,抗干擾設計是單片機應用系統設計中不可忽視的一個重要內容[1-5]。
本文分析了氬弧焊接機床中單片機控制系統干擾的主要來源,就如何通過硬件及軟件技術來全而提高單片機系統的抗干擾性,從而提高其可靠性等問題進行研究,找出解決方案。
2 氬弧焊接機床的系統結構
2.1 氬弧焊接機床的組成結構
氬弧焊接機床由焊接機頭、電氣控制箱、行走裝置和焊接電源4部分組成,控制箱內主要裝有發電機組,整流器,繼電器和接觸器以及引弧,熄弧等控制系統。電源由晶閘管式弧焊整流器和晶閘管式直流斷續器組成(如圖1所示)。
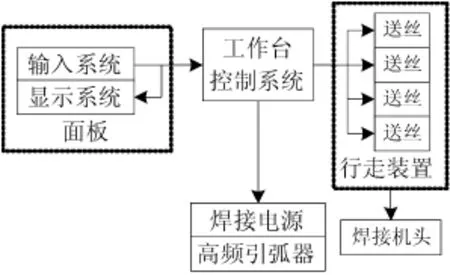
圖 1 氬弧焊接機床的組成結構
自動焊車主要由機頭,控制盤,焊絲盤及焊劑斗和行車機構等部分組成。機械機構主要由工作臺(機座)和機架組成。工作臺的傳動方式采用滾珠絲杠螺母傳動副,以保證一定的傳動精度和平穩性以及結構的緊湊[6-8]。
2.2 氬弧焊接機床的控制系統
本控制系統是由單片機控制模塊,電機運動模塊,弧焊啟停模塊所組成,以單片機為核心,控制焊接過程的啟停和工作臺各裝置的運動狀態。氬弧焊接機床的x,y,z三坐標軸方向的運動及焊接送絲過程由四臺獨立的步進電機分別驅動。
本文采用了80C51單片機控制系統,主要用于工作程序、規范預置、引弧及自動調節等控制功能。電氣控制部分要實現以下幾個方面的功能(見圖2)。
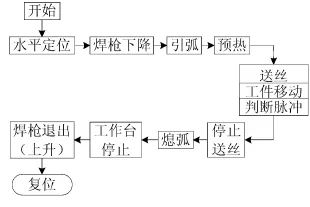
圖 2 單片機控制系統的工作流程圖
(1)完成整個焊機的動作程序, 控制機械設備的運動,包括依次完成機臂下降、引弧、電流遞增、焊接(轉臺轉動)、計時、電流衰減、熄弧、轉臺停轉、焊槍退出(機臂上升)和程序復位等動作程序。
(2)機臂升降和引弧過程控制。若電弧引燃,則自動進入焊接程序; 若引弧失敗, 則焊槍能自動進行第二次引弧, 直至第5次引弧,若電弧仍不能引燃則自動停機、報警, 以便操作人員進行檢查[9-12]。
(3)焊接過程出現異常時, 自動報警。
3 硬件系統的抗干擾設計
系統硬件電路性能的好壞直接影響整個系統工作質量,應用硬件抗干擾措施是經常采用的一種有效方法。通過合理的硬件電路設計可以削弱或抑制絕大部分干擾。在單片機控制系統硬件抗干擾設計中,可以采用以下幾種抗干擾措施。
3.1 電源的抗干擾設計
電源變壓器的初級和次級線圈之間存在著分布電容CF, CF的高頻容抗很小,使高頻干擾以電場形式耦合到次級,造成嚴重干擾。利用靜電屏蔽原理,我們在變壓器的初級繞組和次級繞組之間增加接地的屏蔽層,切斷電場耦合通道,使高頻干擾信號通過屏蔽層直接旁路到地,減少電網的高頻干擾。
3.2 通道抗干擾設計
3.2.1 隔離式相互串擾的設計
在單片機控制的氬弧焊接系統中,單片機控制系統屬于弱電部分,而氬弧焊機則屬于強電部分,它們之間的功率接口直接控制著被控設備。當被控設備啟停時會給單片機控制系統帶來很大的噪聲干擾,因而被控設備就成為單片機控制系統的主要干擾源。
本文采用了光電隔離器件將單片機的輸入輸出隔離開(見圖3),一方面使干擾信號不得進入單片機系統,另一方面單片機系統本身的噪聲也不會以傳導的方式傳播出去。其主要優點是能有效地抑制尖峰脈沖及各種噪聲干擾,從而使傳輸通道的信噪比大大提高。
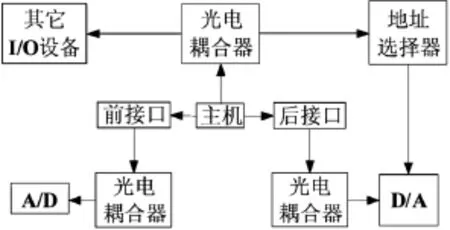
圖3 光電耦合原理圖
3.2.2 防止線間串擾的設計
在預防線間串擾方面,我們采用的具體方法有:將強電信號線和弱電信號線分開;交流和直流分開;數字信號線和模擬信號線分開;傳輸線應盡量遠離電源等大功率器件;傳輸線采用雙絞線,并且要盡量短[13]。
在控制系統內部,交直流電源線、繼電器、氣閥和引弧回路的控制線等,都有可能成為干擾源。同時,焊機和控制系統通過導線連接,導線本身也容易受到外界干擾,因此需要解決線間串擾問題。我們將信號線加以屏蔽,以提高抗干擾能力。屏蔽信號線的辦法是將機內控制線都采用雙絞線。由于兩股導線上感應電流流動方向相反,感應磁通引起的噪聲電流互相抵消,同時長度相等,特性阻抗以及輸人、輸出阻抗相同,抑制噪聲效果比較好。另外,雙絞線雖然有抵消電磁感應干擾的作用,但兩股導線間的分布電容卻比較大,對靜電干擾幾乎沒有抵抗能力,而一端接地的屏蔽線對靜電干擾有較強的抑制作用,因此,連接焊機和單片機控制系統的導線選用屏蔽線,來抑制靜電感應干擾。
3.3 電路布局的抗干擾設計
印刷電路板是器件、信號線、電源線的高密度集合體,設計得好壞對抗干擾能力影響很大。因此印刷電路板設計不是元器件和線路簡單布局,還必須符合抗干擾的原則。
單片機系統通常可分三區,即模擬電路區(怕干擾),數字電路區(既怕干擾、又產生干擾),功率驅動區(干擾源)。而在焊接控制系統中,單片機及其外圍系統工作在l0MHz以上的高頻,PWM控制電路工作于20kHz左右的中頻,交流電源信號工作于50Hz的低頻,另外還有工作于直流和低頻的給定、反饋等模擬信號,電路的工作頻帶相當寬。因此在電路板設計時,印刷板按單點按電源、單點按地原則送電。二個區域的電源線、地線由該點分二路引出;使用滿足系統要求的最低頻率的時鐘,時鐘產生器要盡量靠近用到該時鐘的器件;石英晶體振蕩器外殼要按地,時鐘線要盡量短;使用45°的折線布線,不要使用90°折線,以減小高頻信號的發射;單面板、雙面板,電源線、地線要盡量地粗;關鍵的線盡量短并且要盡量粗,并在兩邊加上保護地;單片機不用端接地或接正電源、閑置不用的門電路輸入端不懸空;引出線與地線要絞起來,圖4為實際設計的電路圖[14]。
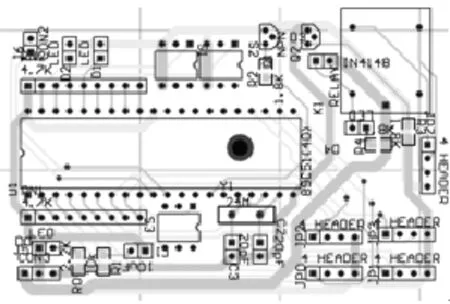
圖4 設計電路圖
4 軟件系統的抗干擾設計
軟件抗干擾技術是當系統受干擾后,使系統恢復正常運行或輸入信號受干擾后去偽存真的一種輔助方法,此技術屬于一種被動抗干擾措施。竄入微機測控系統的干擾,其頻譜往往很寬,且具有隨機性,采用硬件抗干擾措施,只能抑制某個頻率段的干擾,仍有些干擾會侵入系統。因此,僅采取硬件抗干擾方法是不夠的,采取軟件抗干擾是十分必要的。但是由于軟件抗干擾設計靈活,節省硬件資源,操作起來方便易行,所以軟件抗干擾技術在本研究中也得到了重視。
4.1 指令冗余
式中:EL為物流業能源消耗總量;Ej-L為物流業第j種能源消耗量;ET為第三產業能源消耗總量;GDP T為第三產業國內生產總值;GDP為地區國內生產總值;P為地區人口數量;area為地區城市建成區面積;Area為地區面積;R表示地區城市道路面積。
在程序的關鍵地方人為插入一些單字節指令,或將有效單字節指令重寫,稱為指令冗余,通常是在雙字節指令和二字節指令后插入兩個字節以上的NOP指令。這樣即使跑飛程序飛,由于空操作指令NOP的存在,使得這條指令就不會被前面的失控程序拆散。此外,對系統流向起重要作用的指令,如RET、 RETI、LCALL、LMP、JC等,可以在這些指令之前插入兩條NOP指令,以確保這些重要指令的執行[15]。
要注意的是,不宜加入太多的冗余指令,否則會降低程序的運行效率。并且指令冗余不能主動將程序的錯誤執行方向扭轉過來。
4.2 軟件“陷阱”
指令冗余不能完個解決程程序“跑飛”的問題,若“跑飛”的程序沒有落到程序區則指令冗余就無能為力了。對于此種情況,采用設置軟件陷阱的方法加以解決。所謂軟件“陷阱”,就是一條引導指令,該指令能強行將捕獲的程序引向錯誤處理程序或復位地址0000H。
為了保證可靠的運行,以及一旦發生“跑飛”,不但使其有出口而且便于判斷,實際應用中在整個程序中設置了若干軟件陷阱,當程序進入陷阱后,讓其強制進入一個指定地址執行一段專門對程序出錯進行處理的程序。通過本項目使用中的經驗總結,在外場軟件編寫中,軟件陷阱的設置,主要是在正常的程序流程中,在認為較為重要的程序段中隨機設置若干個故障信息顯示程序區,一方面是完成正常的故障信息的顯示,另一方面就是在程序“跑飛”的情況下,通過故障信息的顯示,可以快速判斷“跑飛”的程序段,從而使程序步入正軌。程序流程如圖5所示。
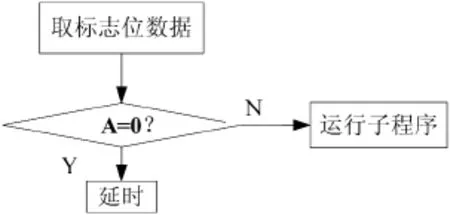
圖5 快速判斷“跑飛”的程序段
通常在程序存儲器中未使用的EROM空間填入空操作指令NOP(00H),最后再填入一條跳轉指令,跳轉到跑飛處理程序,或者直接填入指令LMP 0000H(020000),當跑飛程序落到此區,即可在執行一段空操作后轉入正軌。如果未使用的EROM空間比較大,可以均勻地填入幾條跳轉指令。軟件陷阱的一般結構為:
NOP
NOP
如果程序正常執行,軟件陷阱部分是永遠也執行不到的,只有在程序跑飛到陷阱里,軟件陷阱會立刻將程序跳轉到正常軌道。即使程序沒有跑飛到陷阱里,也可以在程序執行一段錯誤操作后遇到一個軟件陷阱,從而轉入正軌。
4.3 軟件“看門狗”技術
如果“跑飛”的程序落到個臨時構成的死循環中時,也就是常說的“死機”,冗余指令和軟件陷阱都將無能為力了。這時可以采用人工復位的方法使系統恢復正常。實際上可以設計種模仿人工檢測的“程序監視器”,俗稱“看門狗”(WATCHDOG),使程序脫離“死循環”。硬件“看門狗”技術這里不再贅述,軟件“看門狗”技術的原理是通過不斷檢測程序循環運行時間,若發現程序循環時間超過循環設定時間,則認為系統陷入“死循環”,然后強迫程序返回到0000H入口地址,在0000H安排出錯處理程序,使系統納入正規.
以本項目采用的MCS-51系列單片機為例,采用8051芯片將T0的溢出中斷設置為低級中斷,如果系統采用6MHZ的時鐘,可用以下程序段使T0定時約l0ms,來形成軟件WATCHDOG:
MOV TMOD,#01H;
SETB ET0;
SETB PT0;
MOV TH0,#0E0H;定時約l0ms
SETB TR0;
SETB EA;
在本例的應用中,若程序執行了修改T0功能的指令(這此指令由操作數變形后形成),或者嚴重的干擾破壞中斷方式控制字,關閉中斷,造成看門狗失效。這時可以在設計看門狗時可設計兩個定時器,一個為短定時器,一個為長定時器,并各自獨立,短定時器像典型看門狗一樣工作,它保證一般情況下看門狗有快的反映速度,長定時器的定時大于CPU執行一個主循環程序的時間,用來防止看門狗失效。
4.4 輸入多次采樣
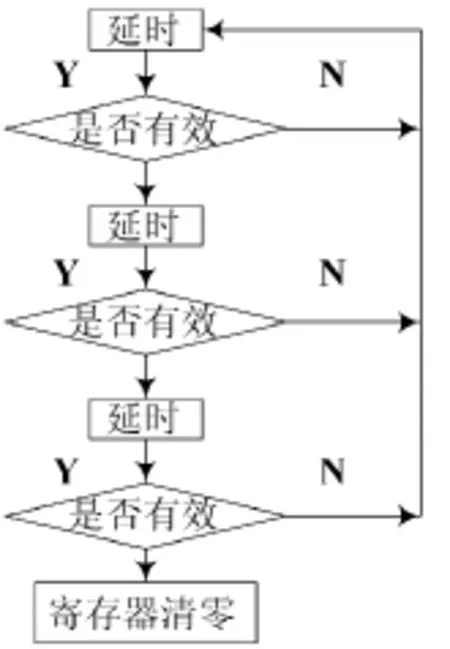
圖6 輸入口信號重復檢測程序流程圖
強烈的干擾會影響單片機的輸入信號,造成輸入信號瞬間采樣的誤差或誤讀,要避免干擾的影響,通常采取重復采樣、加權平均的方法。對于重要開關量輸入信號的檢測,實際應用中采用3次或5次重復檢測的方法,即對接口中的輸入數據信息進行重復進行3次或5次檢測,若結果完全一致則認為是“真”的輸入信號,若多次測試結果不一致,即可以停止檢測顯示故障信息,又可以重復進行再次檢測(程序流程圖如圖6所示)。
4.5 檢查RAM區標志數據
這種方法是在RAM區中選擇幾個固定單元,在初始化程序中將其設置成固定的數據,如“55H”,或“0AAH”等,只要程序正常運行,這些單元的內容是不會改變的。如果因為程序“跑飛”或其它干擾導致這些RAM中一元中的任何單元的數據發生了變化,說明中一片機系統己經受到了嚴重的干擾,不能可靠地運行下去了。我們可以在程序執行的過程中適時地檢查這些RAM中一元的內容,一旦發現有數據改變,立刻執行語句LMP 0000H,強制單片機復位[16]。
5 結論
(1) 本文闡述了氬弧焊接機床單片機控制的工作任務流程、信號干擾源及抗干擾設計,采用硬件與軟件相結合的多種抗干擾設計優化技術,得到了工作環境條件下穩定的單片機實時控制系統。經過使用現場的強電磁環境驗證,該單片機系統在惡劣環境下具有較好的抗干擾性能,保證了氬弧焊接機床的安全、可靠運行,從而解決了強電磁環境對單片機系統的干擾難題。
(2) 硬件抗干擾技術是一種主動的方式,而軟件抗干擾技術是一種被動的方式。軟件設計只有在合理的硬件設計基礎上,才能最大限度地發揮其抗干擾的作用。
[1] 趙敏. 單片機軟件抗干擾技術分析[J]. 福建質量信息,2008(12):23-24.
[2] 田興東. 單片機軟件抗干擾技術[J]. 北華航天工業學院學報, 2007, 17(4): 12-13.
[3] 孫亮, 周忠海. 單片機的抗干擾技術研究[J].設備與設施, 2008, 30(4): 113-114.
[4] 李志宇. 單片機控制系統抗干擾設計[J]. 電子測量技術, 2007(6): 107-107.
[5] 王宗剛. 單片機應用系統中的抗干擾技術[J]. 甘肅科技, 2008, 24(2): 47- 48.
[6] 岳曉慶, 張其善. 串口擴展技術在嵌入式系統中的實現[J]. 電子測量技術, 2006, 29(2): 45-46.
[7] 馬學文, 朱名日. 嵌入式系統中Bootloader的設計與實現[J]. 計算機工程, 2005, 31(7): 96-97.
[8] Vjcter Pnalson. Digital logic circuit analysis and deign[M].1992.75-86.
[9] Mvetsch. Hacker's guide to writing S-function baud I/O drivers for xPC Target,2001.
[10] User'Manual PCI-1710 eries 12/16bit Multifunction Card. ADVANTECH, 2003.
[11] Gruher T R.A translation approach to portable ontology specifications[J]. Knowledge Acquisition, 1993, 5(2): 199-220.
[12] Fikes R, Jenkines J.JPR A query answering system for know ledge represented in DAML[C].U Itralog Meeting, 2002.
[13] S3C2410X 32一BiL RISC Microprocessor Cser's Manua[Z]. SAMSCNG Electronics. Revision 1. 2.
[14] Montrose M I. Printed circuit board design techniques for EMC compliance. IEEE Press, 1996.
[15] Am29LV160D Datasheet. AMD Semiconductor Inc,2000.
[16] S3C2410X 32-BIT RISC MICROPROCESSOR USER'S MANUAL Revision 1.2 Samsung Electronics Co.Ltd, 2003.
The Anti-interfence Research of the system of TIG Control
ZHANG Jin-bai1, WU Xiao-guang1, LI Yu2
(1 School of Electrical and Mechanical Engineering, Wuhan University of Science and Engineering, Wuhan 430073, China 2 College of Electrical and Mechanical Engineering, Wuhan University of Science and Engineering, Wuhan 430073, China)
With the SCM (Single-chip microcomputer) widely applied in the industrial manufacturing, there is a higher demand for the reliability of SCM. High sensitivity plays an indispensable role in SCM system. Thus, anti-interference technology has become an indispensable consideration in SCM system design. This paper analyzes the main sources of the interference in SCM system of arc welding machine and elaborates on the anti-interference design in two aspects respectively, one is hardware (active anti-interference) and the other is software (passive anti-interference). In this way, a more reliable SCM real-time control system is achieved for steady work in the complex working circumstances and the interference puzzle of SCM system caused by intensive electromagnetic circumstances is also settled.
SCM system; source of interference; anti-interference
TG434
A
1009-5160(2010)01-0039-05
*通訊作者:吳曉光(1954-) 男,教授,研究方向:數字化關鍵技術、機電一體化.基金項目:國家自然科學基金資助項目(50775166).
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
人大建設(2019年12期)2019-05-21 02:55:44
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
環球時報(2017-03-30)2017-03-30 06:44:45
中國衛生(2015年3期)2015-11-19 02:53:32
