基于隨機濾波器的SMPM電機定子電阻辨識*
2010-06-26 06:11:28南京師范大學電氣與自動化工程學院江蘇南京210042孫頻東姜曉亮
電氣自動化 2010年1期
南京師范大學電氣與自動化工程學院(江蘇南京210042) 孫頻東 姜曉亮
1 引言
使用稀土永磁材料的新一代三相交流電機具有較高的功率密度和效率,受到研究機構和工業界廣泛的關注,交流永磁電機及其控制系統在國防和民用領域有著廣泛的應用領域,降低電機控制系統的成本、縮小體積和提高永磁電機控制系統的性能一直是研究者關心的問題。將隨機濾波器應用于控制系統,實現對系統參數的辨識,有利于提高控制系統的性能。雖然,隨機濾波器是一種遞推算法,但由于電機模型本身的復雜性使得該算法的計算工作量較大[1-6],需要對一個四階矩陣作求逆運算。從國內研究機構發表的論文[7,8]看,他們使用的也是永磁電機的全階模型。文獻[9]在對模型的處理上,使用了降階算法,使控制算法的計算量大大降低,但該方法需要使用一個速度傳感器,來提供電阻辨識過程中需要的轉速和轉角量。如何在辨識過程中能既不使用速度傳感器,又能降低計算的工作量是一個值得深入研究和探討的問題,本文采用的混合辨識方法為解決這一問題提出了一條有效的途徑。即用滑模算法對電機系統的速度進行辨識,用隨機濾波器對永磁電機定子電阻進行辨識。因為滑模速度觀測器具有對定子電阻變化不敏感的特點[10],另外,滑模轉速位置觀測器的算法簡單易于實現。由于將電阻值的辨識和位置、轉速辨識分開,因此,系統的中斷響應時間得到縮短。
2 交流永磁電機的數學模型
在靜止坐標系下,SMPM電機的數學模型如(1)式所示:
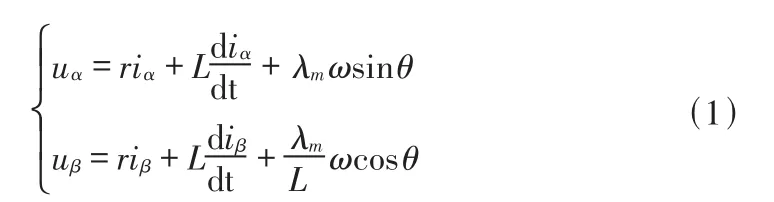
式中,iα,iβ為靜止坐標系 α、β 坐標下的電流分量,uα,uβ為靜止坐標系α、β坐標下的電壓分量,ω為
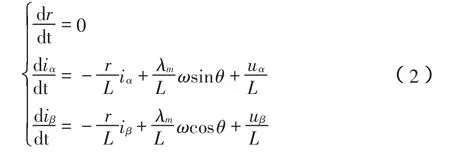
轉子的角速度,θ為轉子的轉角,λm為主磁通,r為定子繞組的電阻。為了能辨識定子繞組中的電阻,對(1)式進行相應變化后,再增設項,該項認為繞組中電阻值的變化較電流、電壓量的變化慢得多,同時認為在電阻辨識過程中轉子轉速 ω和位置角 θ均為已知量,由此電機方程狀態方程和輸出方程可表示成如(3)式所示形式,

考慮到電機模型的非線性,用Jacobian對(2)式進行近似處理,并離散化,再考慮系統的隨機干擾 wk和測量誤差 vk,得到電機離散狀態空間模型如(4)式所示。(4)式中 δxk為離散化后狀態變量的增量,式中的 Γ(xk)和 Δ( xk)如(5)、(6)兩式所示。
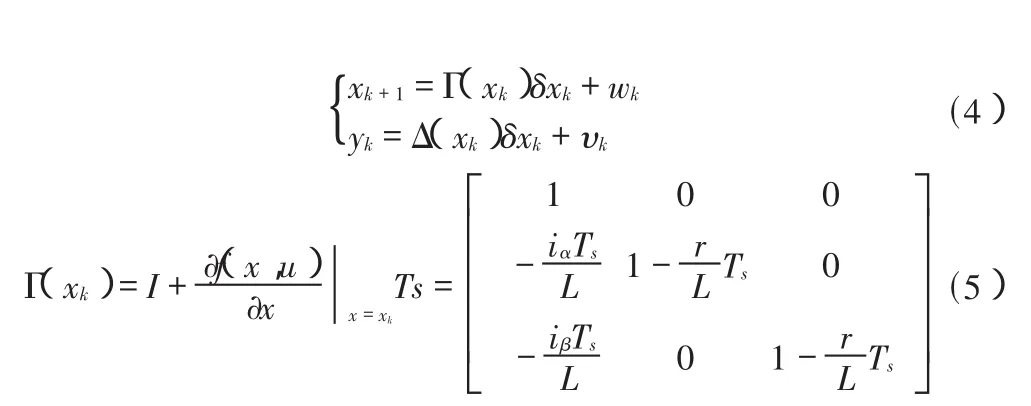
(5)式中的 Ts為系統的采樣周期。

3 隨機濾波算法和滑模速度觀測
3.1 隨機濾波算法
用擴展的Kalman濾波算法,即EKF算法,作為隨機濾波器,用于觀測電機運行過程中定子繞組電阻值的變化,遞推公式如(7)、(8)式所示。

式中 Kk+1陣為Kalman濾波器的增益陣,Pk+1/k,Pk+1/k+1陣為狀態的協方差陣。下標 k+1/k的意義為用過去的值估計現在值,而下標 k+1/k+1的意義將已得到的估計值再進行校正后得到的值。另外,還有隨機噪聲Q和測量噪聲R的協方差陣。在遞推算法中需要幾個初值設定如下: x0/0=[r iα iβ]T=[0 0 0]T
P、Q、R等參數的確定,可以通過優化的方法獲取,選取不同的數值會影響算法的收斂速度。從(7)、(8)式可以得出(9)、(10)的遞推算式。

3.2 滑模速度觀測
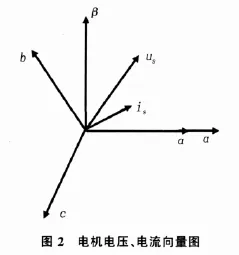
在定子繞組辨識計算中,需要有電機轉角位置和轉速信息,這里用滑模觀測提供轉角位置和轉速的信息。滑模觀測器的結構圖如圖1所示[10]。圖1中的滑模電流觀測算法如式(12)所示,式中的A、B為二階矩陣,如(13)、(14)式所示,L 為相電感,電流 is、電壓 us和反電勢 es均為向量,如(15)式所示。帶波浪號“~”的為估計值,由于電流誤差信號中包含反電勢信息,經低通濾波后得到;電流誤差,經開關切換控制后,得到z信號如(16)式所示;低通濾波的計算公式如(17)式;轉子磁通位置的計算如(18)式所示,另外,is和 us的向量圖如圖(2)所示。
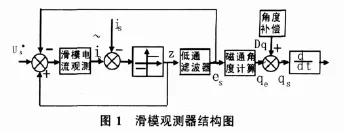
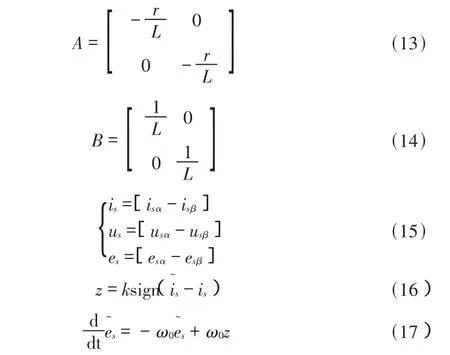
(17)式中的 ω0為濾波器的截止頻率,通過(18)式可以計算出轉子磁通的位置,如(19)式所示。

由于濾波器的加入,產生了相位滯后,因此,需要有一個角度補償,補償位置如圖1所示,補償角的計算如(20)式所示。

(20)式中的 ω0涵義同(17)式,ω為電機轉子的電角速度。
4 結果和分析
?
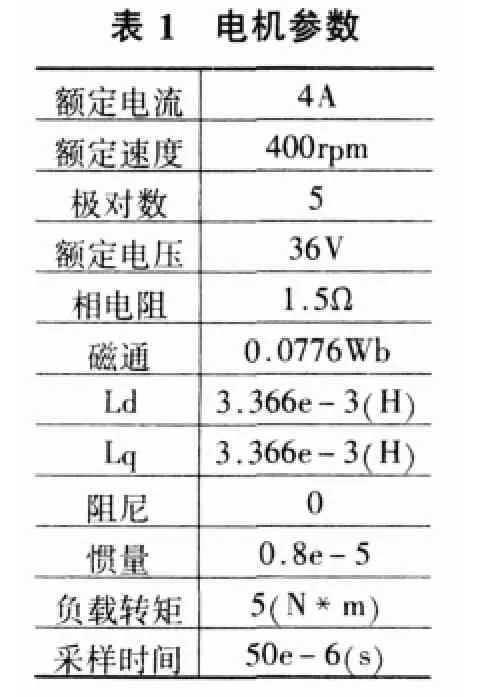
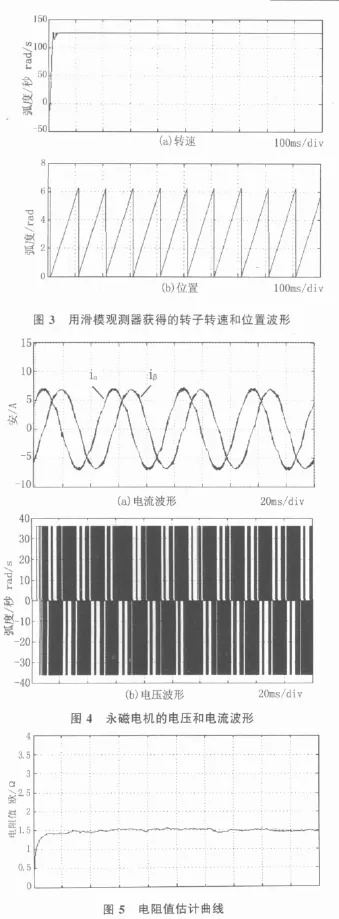
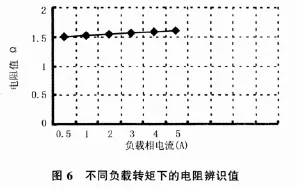
對具有如表1所示參數的電機進行實驗得到的結果如圖3,4和5所示。電機的設定轉速為240rpm,圖3為用滑模觀測器得到的轉子位置和轉速信息;圖4為通過電流和電壓傳感器得到的在靜止坐標軸α-β軸上的電流波形和脈寬調制的PWM電壓波形圖;圖5為用隨機濾波器估計得到的電阻值變化曲線,從圖中可以看出估計誤差很小。在不同的負載下,對估計值進行比較可以得到電阻估計值隨負載的變化曲線,變化曲線如圖6所示,和實際值進行比較非常接近,在負載電流較小時,和實際值比較誤差較小,隨著負載電流的增加誤差變大,這和預計情況相同,負載電流增大引起定子發熱使等效電阻增加。
5 結論
用電機的全階隨機濾波器模型,同時對電機的轉速、位置和定子繞組電阻進行辨識有相當的計算工作量。使用本文提出的混合辨識方法對定子電阻進行辨識,辨識模型的階次能有效降低,由此使辨識的計算工作量明顯減少,辨識中斷所需的計算時間縮短。用滑模觀測器替代位置傳感器,辨識電機的轉速和轉子的位置,具有辨識結果準確,辨識算法簡單,計算工作量小的優點,因此和隨機濾波器結合,在對定子繞組阻值的辨識中,能得到良好的辨識精度。
[1]R.Dhaouadi,N.Mohan,and L.Norum.Design and implementation of an Extended Kalman Filter for the state estimation of a permanent magnet synchronous motor. IEEE Transactions on Power Electronics,1991,7(6):491 ~497.
[2]S.Bolognani,M.Zigliotto,and M.Zordan.Extended-range PMSM sensorless speed drive based on stochastic filtering.IEEE Trans.Power Electronics,2001,1(16):110 ~ 117.
[3]S.Bolognani,R.Oboe,and M.Zigliotto.Sensorless full-digital PMSM drive with EKF estimation of speed and rotor position.IEEE Transactions on Industrial Electronics,1999,2(46):184 ~ 191.
[4]L.Salvatore,and S.Stasi.Application of EKF to parameter and state estimation of PMSM drive.IEE Proceedings-B,1992,5(139):155 ~ 164.
[5]Yoon-Ho Kim,and Yoon-Sang Kook.High performance IPMSM drives without rotational position sensors using reduced-order EKF.IEEE Transactions Energy Conversion,1999,14(4):868 ~873.
[6]M.Cernat,V.Comnac,and R.M.Cernat.Sensorless control of interior permanent magnet synchronous machine using a Kalman filter.Industrial Electronics,2000.ISIE 2000.Proceedings of the 2000 IEEE International Symposium on Volume 2,2000,9:401 ~ 406.
[7]張猛,肖曦,李永東.基于擴展卡爾曼濾波器的永磁同步電機轉速和磁鏈觀測器[J].中國電機工程學報,2007,27(36):36 ~ 40
[8]陳鎮,劉向東,靳永強,戴亞平.采用擴展卡爾曼濾波磁鏈觀測器的永磁同步電機直接轉矩控制[J].中國電機工程學報,2008,28(33):75~81.
[9]孫頻東.基于EKF算法的交流永磁無刷同步電機參數辨識[J].電氣自動化,2008,30(3):17 ~ 20.
[10]宋丹,胡春華,孫承波,陳國呈.基于滑模觀測器的永磁同步電機控制系統研究[J].電力電子技術,2007,41(3):9 ~11.