方向舵卡死無人機步出螺旋運動控制律的設計
2010-06-05 09:15:02陳淑琴趙文成席劍輝
電光與控制 2010年9期
關鍵詞:設計
陳淑琴,趙文成,席劍輝
(沈陽航空工業學院,沈陽 110136)
0 引言
尾旋問題是航空領域需要解決的一個重要問題,國外有關資料表明,在1960~1970年間,美國發生的嚴重飛行事故有近22%是由尾旋引起的[1],而無人機步入螺旋運動狀態是尾旋的前期表現,步入螺旋運動后如果不及時對其加以控制,無人機很快會尾旋而墜毀。在無人機的飛行過程中,如果方向舵卡死,其橫向穩定性與航向穩定性將會發生改變,當時無人機就會步入螺旋運動。
目前關于無人機螺旋運動的研究,據俄羅斯“搜索”網站2008年12月24日報道:為了避免空難的發生,俄羅斯中央空氣流體動力學研究所正在開發避免飛機進入螺旋狀態的專業技術;而國內對螺旋運動的研究甚少。
本文從方向舵卡死產生的影響出發,得出方向舵卡死無人機可能步入螺旋運動,進而仿真驗證了此結論。并且進行了方向舵卡死只控制副翼改出螺旋運動控制律的設計,仿真結果驗證了所設計控制律的可行性。
1 方向舵卡死產生的力與力矩
如圖1所示,方向舵卡死在δy0,相當于垂直尾翼處側滑角改變了 nyδy0,即:

式中:ny為方向舵效率。
由此側滑角產生的側力為

式中:acw為垂尾升力線斜率[5]。
側力對重心產生的滾轉力矩、偏航力矩分別為

式中:ycw為偏航力臂;Lcw為滾轉力臂。
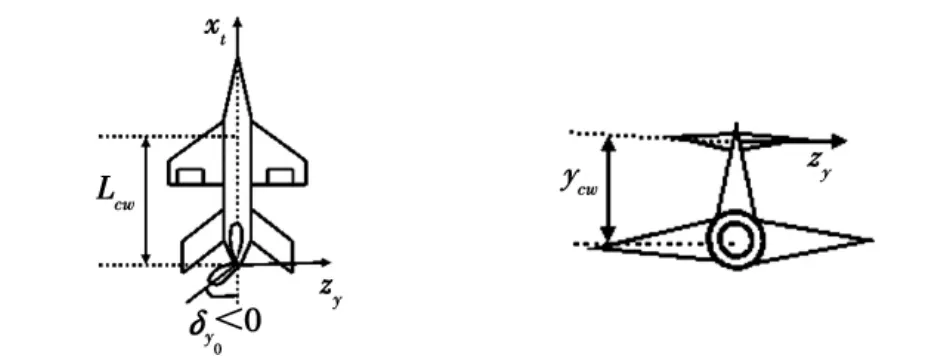
圖1 方向舵卡死后的力矩分析圖Fig.1 Moment analysis after the rudder deadlock
2 方向舵卡死與螺旋運動關系
2.1 理論分析
螺旋運動是同向的滾轉與偏航運動,伴隨著滾轉與偏航,無人機的高度逐漸下降,滾轉角逐漸增大。通過上面分析,方向舵卡死負的舵偏角,進而產生了正的滾轉力矩與偏航力矩。根據螺旋運動的物理成因[6],在擾動后期無論無人機先出現滾轉還是先出現側滑,只要航向靜穩定導數大于橫向靜穩定導數,它就會步入螺旋運動。
圖2是以方向舵卡死先產生滾轉運動為例,分析引起無人機螺旋運動的氣動力矩(其中粗線路徑為起主要作用的氣動力矩)。
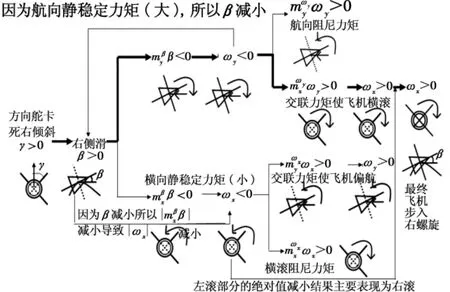
圖2 影響螺旋運動的氣動力矩Fig.2 Aerodynamic moment affect by the spiral motion
2.2 仿真驗證
采用小型渦輪螺旋槳飛機A4D方向舵卡死在10°的氣動數據[7],高度為 4550 m、馬赫數為 0.9、速度為290 m/s。氣動導數表如表1所示。
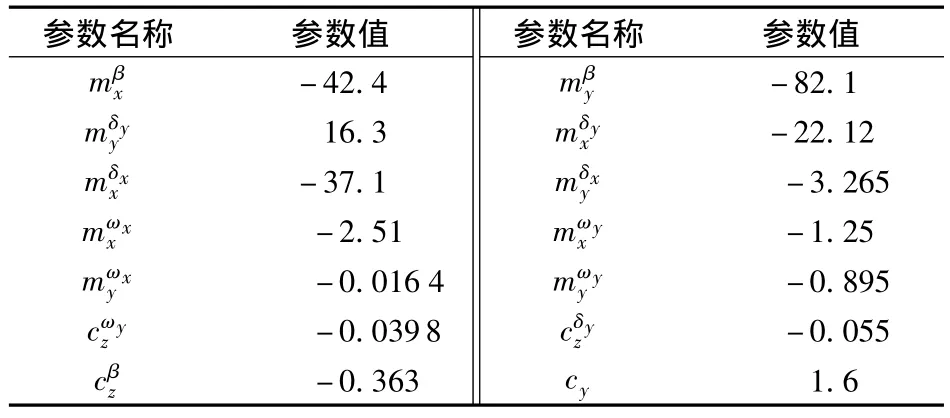
表1 氣動導數表Table 1 The aerodynamic derivatives
方向舵卡死后滾轉角、偏航角、滾轉角速度和偏航角速度響應曲線如圖3、圖4所示。

圖3 滾轉角、偏航角響應曲線Fig.3 Response curves of roll angle and yaw angle
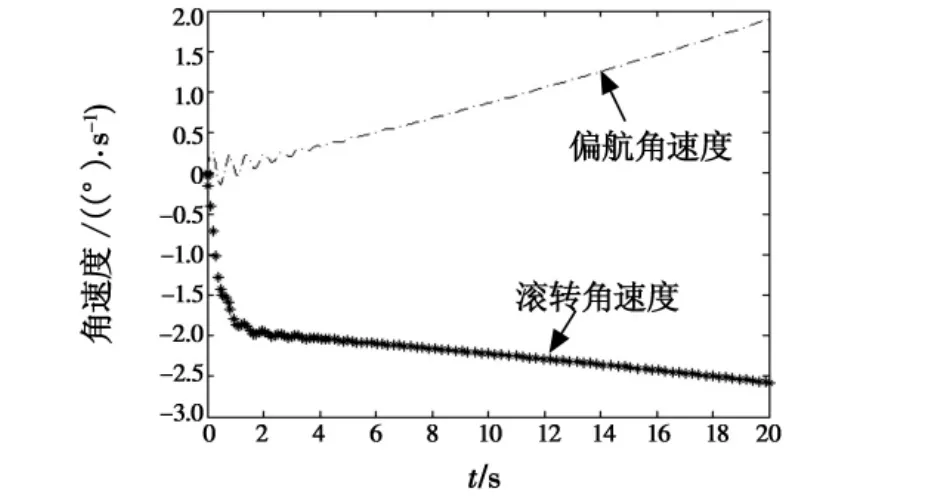
圖4 滾轉角速度、偏航角速度響應曲線Fig.4 Response curves of roll speed and yaw speed
從圖3可以看出滾轉角為負且為負向增長,說明飛機左滾;偏航角為正且為正向增長,說明飛機左偏航。同時圖4中滾轉角速度負增長,偏航角速度為正增長,同樣說明飛機有左偏航、左滾轉的趨勢。總之圖3、圖4均說明在該狀態下(即方向舵卡死),當航向穩定性大于橫向穩定性時,如果不加以控制,飛機會步入螺旋運動。
3 步出螺旋運動控制律的設計
通過上面的分析方向舵卡死,并且橫航向穩定導數滿足一定的關系,無人機可能步入螺旋運動。而螺旋運動是橫側向的一種飛行模態,下面討論如何設計橫航向的控制律使無人機步出螺旋運動。
改出螺旋運動可以使無人機按指定的滾轉角作傾斜飛行或是按指定的偏航角飛行。正常無人機保持這兩種飛行狀態時控制律的設計可以通過副翼、方向舵聯合控制實現。方向舵卡死后不能用正常時的控制律,此時方向舵為不可控舵面,且方向舵產生的力矩會作為常值干擾影響橫向與航向運動,所以實現這兩種飛行只能通過控制副翼來完成。本文在方向舵卡死小角度基礎上研究,具體實現方法介紹如下。
3.1 按指定角度傾斜飛行控制律的設計
在副翼通道中單獨引入傾斜角反饋信號,滾轉模態特性變差,如果無人機本身的橫向阻尼較小時,滾轉與螺旋模態容易耦合成衰減較慢、周期較長的振蕩運動。所以內回路中同時引入滾轉角速度反饋以提高螺旋運動的穩定性。外回路反饋滾轉角的差值,以實現無人機步出螺旋運動并且按給定的傾斜角飛行。副翼的控制律為
在設置 Kγ1時,采用 PID 控制[9]滾轉角反饋,取方向舵卡死在10°,滾轉角保持在0°,Simulink框圖如圖5所示。
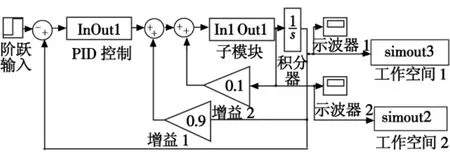
圖5 傾斜保持框圖Fig.5 The diagram of inclined keeping
仿真結果如圖6所示。
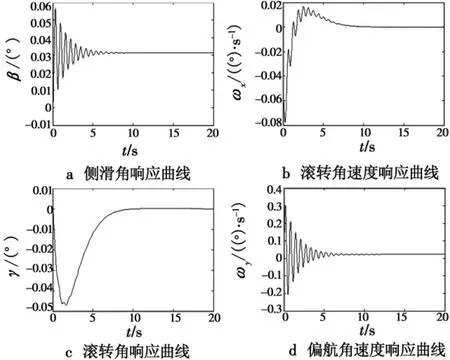
圖6 傾斜保持輸出響應Fig.6 The output response of inclined keeping
仿真結果圖6c為滾轉角響應曲線,最終滾轉角保持在0°,圖6b和圖6d為滾轉角速度、偏航角速度響應曲線,最終均逐漸趨向于穩定狀態。說明通過副翼的控制,實現了步出方向舵卡死后引起的無人機左滾轉、左偏航的螺旋運動狀態。
3.2 按指定偏航角飛行控制律的設計
方向舵卡死后步出螺旋運動可以使無人機按著指定的航向飛行。同步出螺旋運動按指定滾轉角飛行控制律的設計類似,內回路同樣用滾轉角、滾轉角速度反饋;外回路用偏航角度的差值進行反饋補償。同樣取方向舵卡死在10°,副翼通道的控制律為

采用PID控制偏航角,取方向舵卡死在10°,使無人機步出螺旋運動偏航角保持在17°飛行,其Simulink框圖如圖7所示。
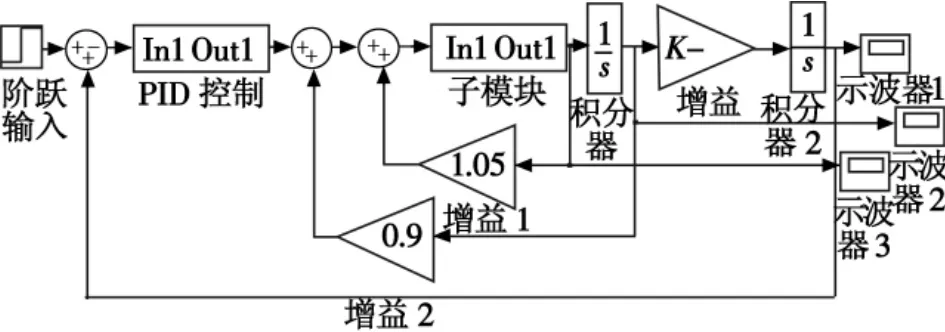
圖7 偏航保持框圖Fig.7 The diagram of yaw keeping
仿真結果如圖8所示。
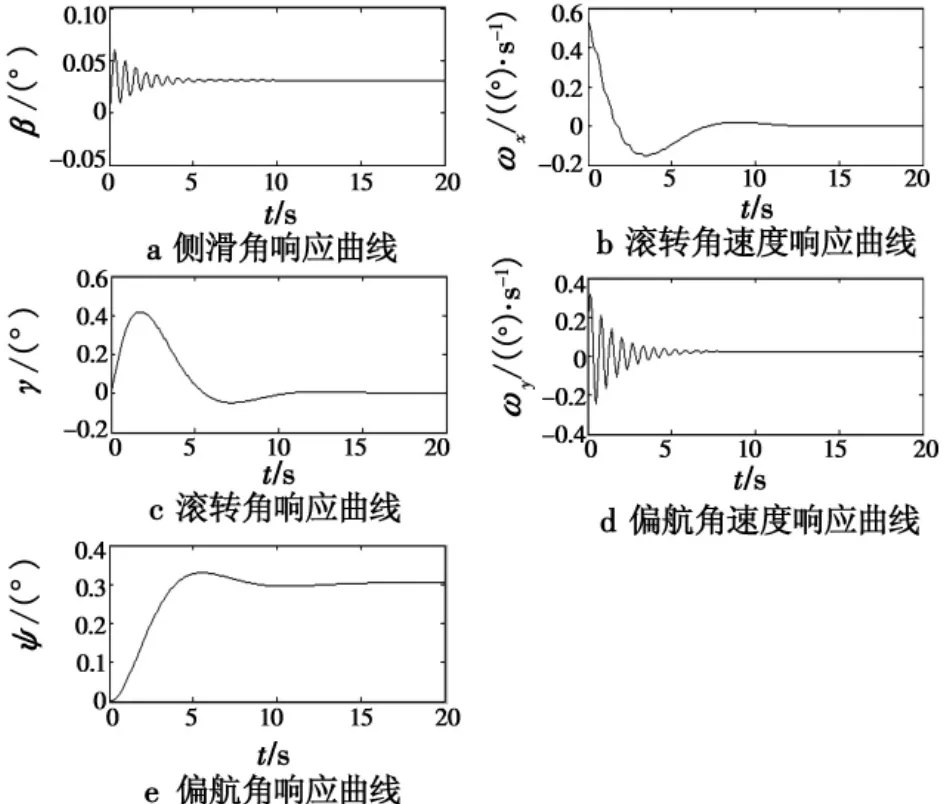
圖8 偏航保持框圖Fig.8 The output response of yaw keeping
圖8e為偏航角響應曲線,最終偏航角保持在17°;圖8c為滾轉角響應曲線,最終滾轉角保持在0°;圖8b為滾轉角速度響應曲線,圖8d為偏航角速度響應曲線,最終均保持在0(°)/s上;圖8a為側滑角響應曲線,側滑角最終保持在1.5°左右的一個小角度上。從各狀態的保持值看出,無人機在該控制律下很好地實現了改出螺旋運動并且保持一定的偏航角飛行。
4 結論
1)無人機在方向舵卡死的情況下,當橫航向穩定性發生變化后,其容易步入螺旋運動模態。仿真結果證明了結論的正確性。
2)無人機步入螺旋運動后,如果方向舵卡死在有限范圍內,可以通過調整副翼設計合適的控制律,以改出螺旋運動狀態,實現無人機按指定的滾轉角或偏航角飛行。仿真結果證明了文中設計的控制律能夠實現改出螺旋運動并保持一定的滾轉角或偏航角飛行,說明所設計控制律的可行性。
文中控制律設計時運用了經典的PID控制,未來可以研究模型跟蹤自適應方法或是特征結構配置方法修改控制律,以便設計的控制律更加精準、方便。
[1]高正紅.失速計算方法與仿真軟件[D].西安:西北工業大學,2003:3-5.
[2]ANANTHKRISHNAN N.Computational flight dynamicspresent status and directions for the future[J].Journal of Aerospace Sciences & Technologies,2003,55(1):1-5.
[3]REIGELSPERGER W C,BANDA S S.Nomlinear simulation of a modified F-16 with full-enbelope control laws[J].Control Engineering Practice,1998,6(3):309-320.
[4]STEINBERG M L.A comparison of intelligent,adaptive,and nonlinear flight control laws,A867863[R].Naval Air Warfare Center Aircraft Div Patuxent River MD,1999.
[5]孟維杰,關英勇,郝大琦.飛機操縱面功能余度研究[J].飛機設計,2006(1):56-58.
[6]徐鑫福,馮亞昌.飛機飛行操縱系統[M].北京:北京航空航天大學出版社,1989.
[7]肖順達.飛行自動控制系統[M].北京:國防工業出版社,1980.
[8]席慶彪,袁冬莉,閆建國.無人機橫側向飛行控制系統研究[J].飛行力學,2004,22(4):16-18.
[9]李瑋.無人機飛行PID控制及智能PID控制技術研究[D].南京:南京理工大學,1999:49-54.
[10]馮昊.無人機自動著陸控制[D].南京:南京航空航天大學,2003:34-38.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
