基于角速度補償?shù)慕萋?lián)天線穩(wěn)定系統(tǒng)設(shè)計
2010-08-05 08:53:58趙超
電光與控制 2010年9期
關(guān)鍵詞:系統(tǒng)
趙 超
(北京華航無線電測量研究所,北京 100013)
0 引言
捷聯(lián)末制導(dǎo)是各種低成本、小型化制導(dǎo)武器的首選技術(shù)方案,它分為全捷聯(lián)和半捷聯(lián)兩種方式[1]。全捷聯(lián)方式徹底取消了機械回轉(zhuǎn)機構(gòu),體積、成本大幅降低,可靠性提高,但導(dǎo)引頭需要較大的瞬時視場。半捷聯(lián)方式綜合了全捷聯(lián)和傳統(tǒng)陀螺穩(wěn)定平臺的優(yōu)點,保留了機械回轉(zhuǎn)框架,取消了導(dǎo)引頭上獨立配置的陀螺,利用彈上捷聯(lián)慣導(dǎo)的姿態(tài)信息,實現(xiàn)天線平臺的間接穩(wěn)定。半捷聯(lián)末制導(dǎo)系統(tǒng)的技術(shù)核心是捷聯(lián)天線穩(wěn)定算法,它們大都采用以坐標(biāo)變換為基礎(chǔ)的角位置補償控制方案,通過矢量的慣性指向不變性原理得出理想的伺服系統(tǒng)控制指令[2-3],缺點是技術(shù)難度較大,控制精度不高,且用于制導(dǎo)的視線角速度信息提取困難。文獻[1,4-5]研究了基于速度補償?shù)慕萋?lián)穩(wěn)定方案,提出采用天線伺服框架角速度和彈體角速度重構(gòu)天線空間角速度的思想,并設(shè)計了匹配濾波器來提高穩(wěn)定系統(tǒng)對彈體姿態(tài)的去耦能力。但是這些研究僅考慮了一維角運動的簡單情況,實際上彈體和框架角都是框架三維運動,天線的空間運動關(guān)系遠比該模型復(fù)雜得多。文獻[6]考慮了三維運動情況,給出了能夠使天線指向慣性空間穩(wěn)定的伺服系統(tǒng)速度補償指令。但是沒有給出天線穩(wěn)定控制系統(tǒng)的整體控制結(jié)構(gòu),沒有建立末制導(dǎo)系統(tǒng)跟蹤回路和穩(wěn)定回路的銜接關(guān)系,所以只能解決天線的純穩(wěn)定問題,而無法處理目標(biāo)跟蹤情況下的天線控制問題。
本文研究了半捷聯(lián)末制導(dǎo)系統(tǒng)中捷聯(lián)天線穩(wěn)定系統(tǒng)設(shè)計的問題,提出了一種新的基于角速度補償?shù)慕萋?lián)天線穩(wěn)定控制算法,給出了末制導(dǎo)系統(tǒng)天線穩(wěn)定平臺的完整實現(xiàn)方案,該方案能夠解決天線的純穩(wěn)定和目標(biāo)跟蹤兩種工作模式下的天線控制問題。
1 天線穩(wěn)定系統(tǒng)工作原理
1.1 陀螺穩(wěn)定方案
彈載末制導(dǎo)系統(tǒng)的天線穩(wěn)定系統(tǒng)一般采用兩軸回轉(zhuǎn)框架結(jié)構(gòu),通過直流力矩電機帶動天線盤運動以實現(xiàn)俯仰、航向雙平面跟蹤能力。在導(dǎo)彈飛行過程中,彈體姿態(tài)的變化會通過框架摩擦力矩作用在回轉(zhuǎn)框架上,造成天線指向的偏差,因此天線穩(wěn)定系統(tǒng)還必須能夠隔離彈體姿態(tài)擾動的影響。在傳統(tǒng)的速率陀螺穩(wěn)定系統(tǒng)中,兩個陀螺正交地安裝在天線盤背面,可以直接敏感出天線的空間運動角速度,從而實現(xiàn)天線空間指向穩(wěn)定和對彈體姿態(tài)擾動的解耦。天線陀螺穩(wěn)定系統(tǒng)的原理框圖如圖1所示,其中:Gs為天線伺服系統(tǒng)傳遞函數(shù);Gf為速率陀螺傳遞函數(shù);ε為跟蹤回路誤差信號;uc為穩(wěn)定回路指令信號;uf為穩(wěn)定回路反饋信號;?,λ,θ分別為彈體姿態(tài)角、伺服框架角、天線空間指向角,它們之間的關(guān)系如圖2所示(一維相對運動情況)。
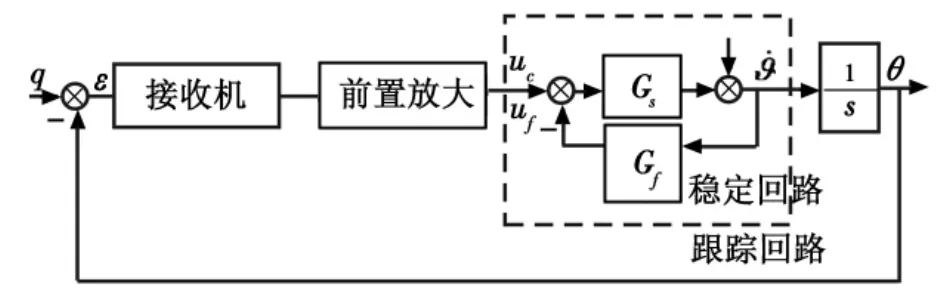
圖1 天線陀螺穩(wěn)定系統(tǒng)原理圖Fig.1 Schematic of the gyro stabilization system
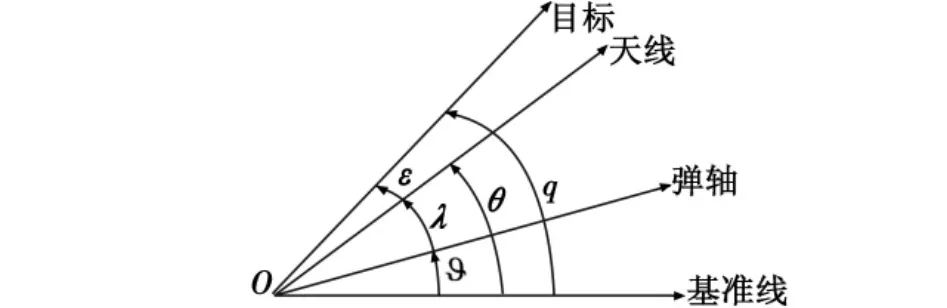
圖2 空間角位置關(guān)系示意圖Fig.2 Schematic of spatial angles
可以看出,天線穩(wěn)定系統(tǒng)是一個雙回路控制系統(tǒng),外環(huán)為跟蹤回路,用來檢測目標(biāo)跟蹤過程中的角誤差,內(nèi)環(huán)為穩(wěn)定回路,用于控制天線伺服機構(gòu)電機轉(zhuǎn)速,消除天線指向誤差,同時補償彈體姿態(tài)擾動的影響。一般利用速率陀螺輸出目標(biāo)視線角速度信息,采用比例導(dǎo)引方法控制導(dǎo)彈飛向目標(biāo)。
根據(jù)圖1,可求出天線穩(wěn)定回路(虛框中的部分)的傳遞函數(shù)為

可見,天線運動不僅取決于穩(wěn)定回路指令信號(與跟蹤回路誤差有關(guān)),還受到彈體姿態(tài)運動的影響。理想情況下要求天線指向?qū)楏w姿態(tài)解耦,為此控制系統(tǒng)設(shè)計中一般希望天線伺服系統(tǒng)前向通道的增益盡可能大,當(dāng)|Gs|>>1時,穩(wěn)定系統(tǒng)可實現(xiàn)彈體姿態(tài)擾動的去耦。
1.2 捷聯(lián)穩(wěn)定方案
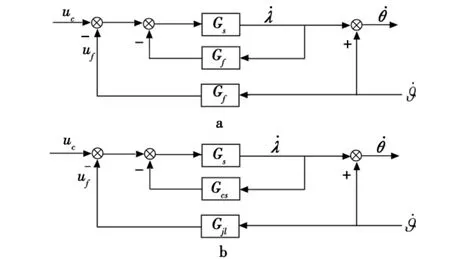
圖3 穩(wěn)定回路等效圖Fig.3 Equivalent diagram of stabilization loop
在捷聯(lián)末制導(dǎo)系統(tǒng)中,導(dǎo)引頭中取消了陀螺,天線穩(wěn)定系統(tǒng)中所需的空間絕對角速度信息無法直接測量,此時可以利用彈上捷聯(lián)慣導(dǎo)給出的彈體姿態(tài)運動信息,以及導(dǎo)彈、導(dǎo)引頭、天線之間的相對運動關(guān)系,使用運動合成方法來重構(gòu)天線空間運動信息,最終實現(xiàn)天線平臺的間接穩(wěn)定。
需要指出在陀螺穩(wěn)定方案中,導(dǎo)彈制導(dǎo)所需的目標(biāo)視線角速度信息可以通過速率陀螺直接提取,而在捷聯(lián)穩(wěn)定方案中,慣導(dǎo)陀螺并不跟隨視線運動,視線角速度信息只能通過數(shù)學(xué)方法間接提取。
2 捷聯(lián)天線穩(wěn)定系統(tǒng)控制方案
2.1 捷聯(lián)穩(wěn)定系統(tǒng)原理與組成
捷聯(lián)天線穩(wěn)定系統(tǒng)的原理框圖如圖4所示,其中測角元件敏感天線框架角運動,捷聯(lián)慣導(dǎo)敏感彈體姿態(tài)運動,這些信息同時送給DSP控制模塊,完成天線伺服系統(tǒng)控制量計算,再通過功率放大帶動天線伺服機構(gòu)運動。DSP控制模塊是捷聯(lián)穩(wěn)定系統(tǒng)的核心,它包括伺服系統(tǒng)校正網(wǎng)絡(luò)、穩(wěn)定回路反饋量計算、視線角速度估算3種功能。可見,捷聯(lián)天線穩(wěn)定平臺本質(zhì)上是一種數(shù)學(xué)穩(wěn)定平臺,它依靠數(shù)學(xué)解算實現(xiàn)天線穩(wěn)定控制與目標(biāo)跟蹤,同時利用坐標(biāo)變換關(guān)系對目標(biāo)視線角速度信息進行估算用于比例導(dǎo)引。
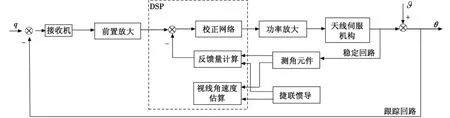
圖4 捷聯(lián)天線穩(wěn)定系統(tǒng)原理圖Fig.4 Schematic of the strap-down stabilization system
根據(jù)1.2節(jié)中的分析,可以畫出捷聯(lián)天線穩(wěn)定系統(tǒng)中穩(wěn)定回路的控制方塊圖如圖5所示。其中:Gs為天線伺服系統(tǒng);Gcs為與天線同軸的測速元件;Gjl為捷聯(lián)陀螺;N為測速環(huán)節(jié)的傳感器噪聲;uf為穩(wěn)定回路反饋信號;為目標(biāo)視線角速度估計輸出(用于比例導(dǎo)引);?,λ,θ分別為彈體姿態(tài)角、伺服框架角、天線空間指向角。
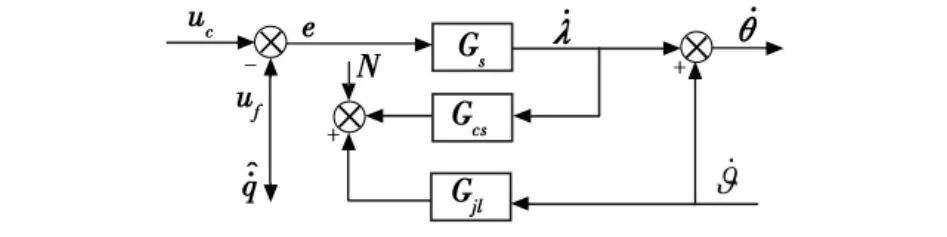
圖5 捷聯(lián)穩(wěn)定系統(tǒng)原理圖Fig.5 Schematic of strap-down stabilization
根據(jù)圖5可知,在捷聯(lián)穩(wěn)定方案中,天線空間角速度為

忽略傳感器噪聲N的影響,當(dāng)陀螺通道與測速環(huán)節(jié)的傳遞函數(shù)完全匹配(即Gcs=Gjl)時,上式簡化為

對比式(1)可見,此時捷聯(lián)方案和陀螺方案的效果完全相同,當(dāng)|Gs|>>1時,穩(wěn)定系統(tǒng)可以實現(xiàn)彈體姿態(tài)去耦功能。
2.2 角速度補償信號解算
必須指出:前面的分析僅僅為了說明天線穩(wěn)定系統(tǒng)的控制原理,其中各種空間角位置的關(guān)系(參考圖2)只有在一維情況下才是有效的,實際上,因為導(dǎo)彈彈體同時存在俯仰、航向、滾動3個通道姿態(tài)運動,導(dǎo)引頭天線伺服系統(tǒng)也同時進行俯仰、航向兩個通道的運動,這樣實際的天線空間運動合成關(guān)系就不能按照的簡單關(guān)系來表示。下面討論在空間三維運動的情況下,如何確定捷聯(lián)穩(wěn)定系統(tǒng)的速度補償信號uf。
設(shè)天線坐標(biāo)系和彈體坐標(biāo)系的轉(zhuǎn)換關(guān)系如圖6所示。
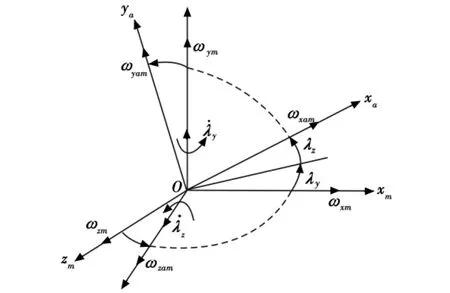
圖6 坐標(biāo)系轉(zhuǎn)換關(guān)系Fig.6 Conversion of coordinate system
圖中:Oxmymzm為彈體坐標(biāo)系;Oxayaza為天線坐標(biāo)系(假定兩坐標(biāo)原點相同);λy,λz為天線平臺伺服框架角為框架角速度;ωxm,ωym,ωzm為導(dǎo)彈角速度的彈體坐標(biāo)系分量。設(shè)天線絕對角速度在天線坐標(biāo)系中的分量為 ωxa,ωya,ωza,顯然天線在慣性空間的運動由天線伺服系統(tǒng)的運動和彈體姿態(tài)的牽連運動兩部分組成,令 ωxas,ωyas,ωzas表示前者引起的天線角速度分量,ωxam,ωyam,ωzam表示后者引起的天線角速度分量。根據(jù)坐標(biāo)變換關(guān)系有:
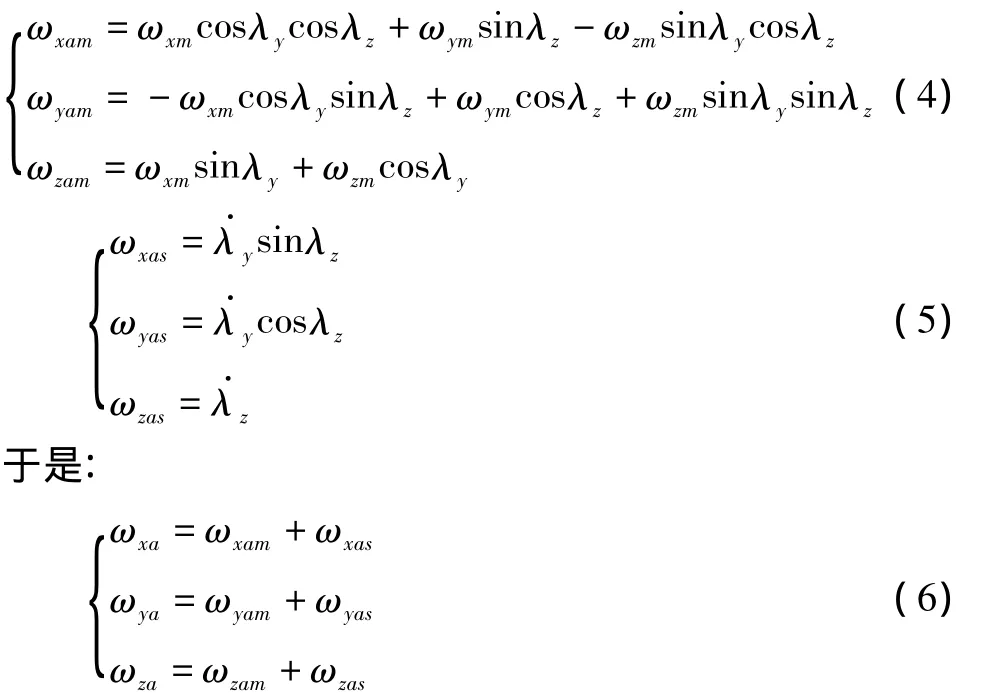
為簡化分析,暫時忽略傳感器噪聲N的影響,并假定圖5中兩個測速通道的傳遞函數(shù)為匹配環(huán)節(jié),即Gcs=Gjl=Gf。
1)天線俯仰通道,取:
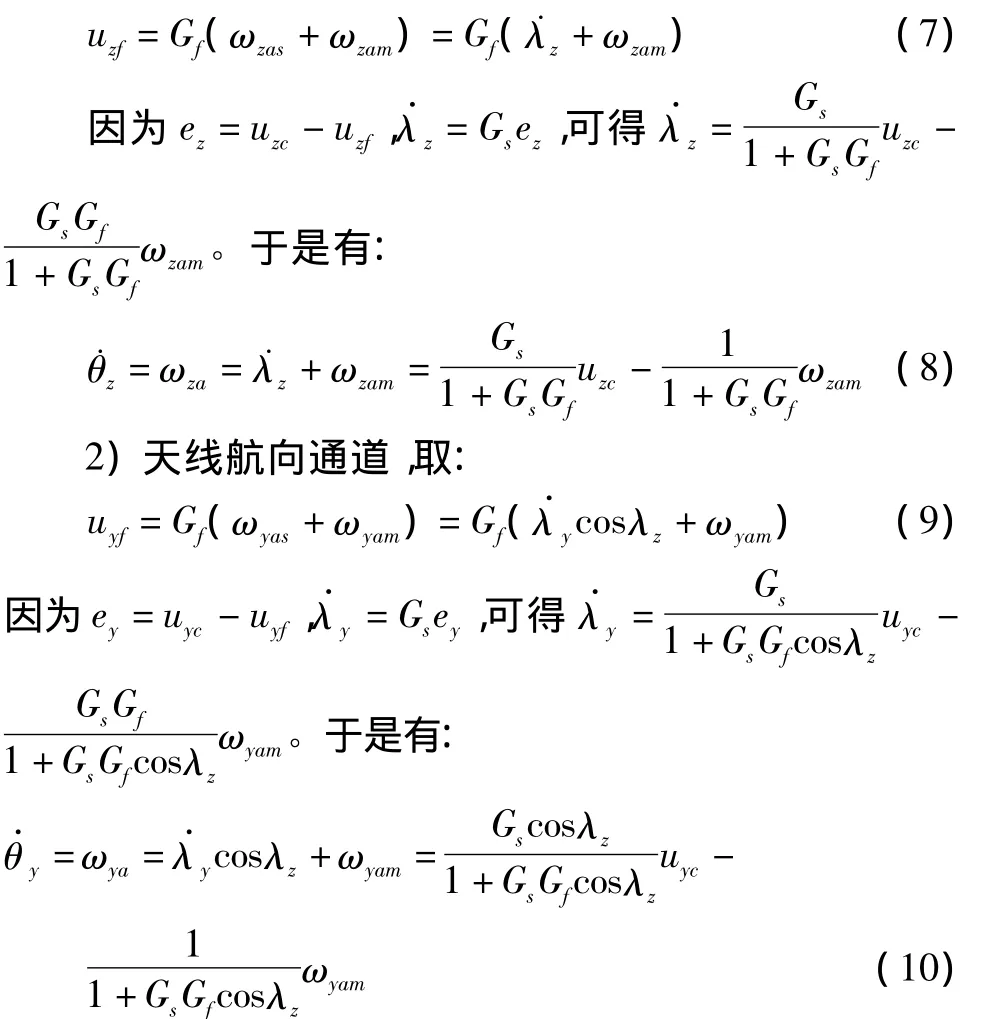
將式(8)、式(10)和式(1)對比,可見采用上述速度補償信號后,捷聯(lián)穩(wěn)定方案在最終的控制效果上完全等效于陀螺穩(wěn)定方案。于是式(4)~式(10)就構(gòu)成了基于速度補償?shù)慕萋?lián)穩(wěn)定控制算法。
2.3 目標(biāo)視線角速度估算
在陀螺穩(wěn)定系統(tǒng)中,速率陀螺所敏感的天線坐標(biāo)系角速度分量就是目標(biāo)視線角速度。類似地,在捷聯(lián)穩(wěn)定系統(tǒng)中可以按照如下方法得到視線角速度的估計值:
在捷聯(lián)穩(wěn)定控制算法中必須注意以下問題:
1)理想的速度補償效果要求穩(wěn)定系統(tǒng)的陀螺通道與測速環(huán)節(jié)的傳遞函數(shù)完全匹配(即Gcs=Gjl),而實際上的測速環(huán)節(jié)動態(tài)特性一般比陀螺要快,要使兩者匹配,最實用的方法是設(shè)計適當(dāng)?shù)臄?shù)字匹配濾波器對測速環(huán)節(jié)進行處理以提高穩(wěn)定回路對彈體姿態(tài)運動的去耦能力[3-4]。
2)捷聯(lián)算法中需要對伺服框架角λ進行微分運算,這將會放大傳感器的測量噪聲,因此天線框架角的測量需要采用高精度低噪聲的測角元件(必要時進行濾波處理),或者選用帶有角速度輸出功能的旋變解調(diào)器,如果確需進行微分運算,最好對微分器的輸出進行低通濾波后再使用,以免產(chǎn)生過大的控制量超出伺服系統(tǒng)響應(yīng)范圍,最終導(dǎo)致較差的控制效果。
3 仿真結(jié)果
對圖4所示的捷聯(lián)天線穩(wěn)定系統(tǒng)進行數(shù)學(xué)仿真,有關(guān)參數(shù)如下:接收機信號處理延遲為0.1 s,前置放大倍數(shù)為8,伺服系統(tǒng)電機帶載時間常數(shù)為0.1 s,校正網(wǎng)絡(luò)采用PID校正,測角元件的噪聲模型取方差為10-6的白噪聲,為了克服微分運算對噪聲的放大作用,增加一個傳遞函數(shù)為的數(shù)字濾波器,同時假設(shè)陀螺通道與測速環(huán)節(jié)的傳遞特性完全匹配。此外,彈體姿態(tài)運動參數(shù)取為:?x=1·sin2πt,?y=1.5 sin10t,?z=1.2 sin5t。
捷聯(lián)天線穩(wěn)定系統(tǒng)在純穩(wěn)定方式下的仿真結(jié)果如圖7~圖8所示。在角速度補償控制算法的作用下,天線指向表現(xiàn)出較強的彈體姿態(tài)解耦能力,其中航向耦合系數(shù)約為3.3%,俯仰耦合系數(shù)約為4.2%。另假設(shè)目標(biāo)機動為1°的階躍運動,末制導(dǎo)系統(tǒng)在目標(biāo)跟蹤方式下的仿真結(jié)果如圖9~圖10所示,相應(yīng)的伺服框架角速度的仿真結(jié)果如圖11~圖12所示。可見,在捷聯(lián)穩(wěn)定系統(tǒng)作用下,天線能夠較快地跟蹤目標(biāo)角運動,跟蹤過程超調(diào)量適中、靜差不大,能夠滿足末制導(dǎo)系統(tǒng)的要求。
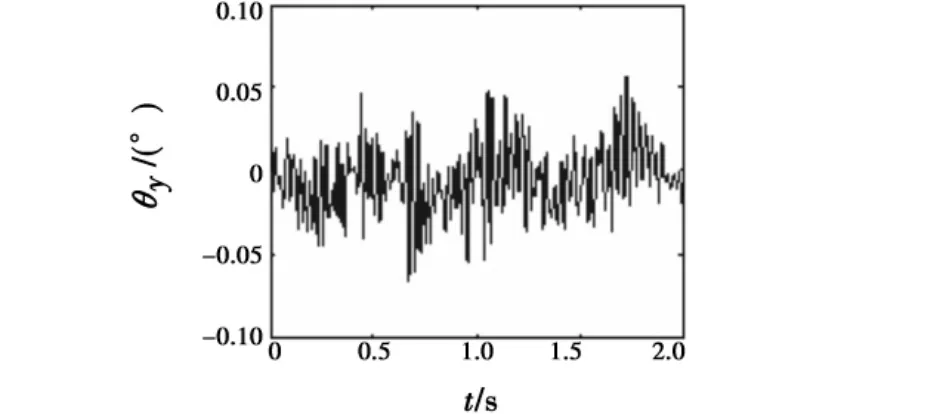
圖7 天線指向誤差(航向通道)Fig.7 Antenna pointing error(azimuth)
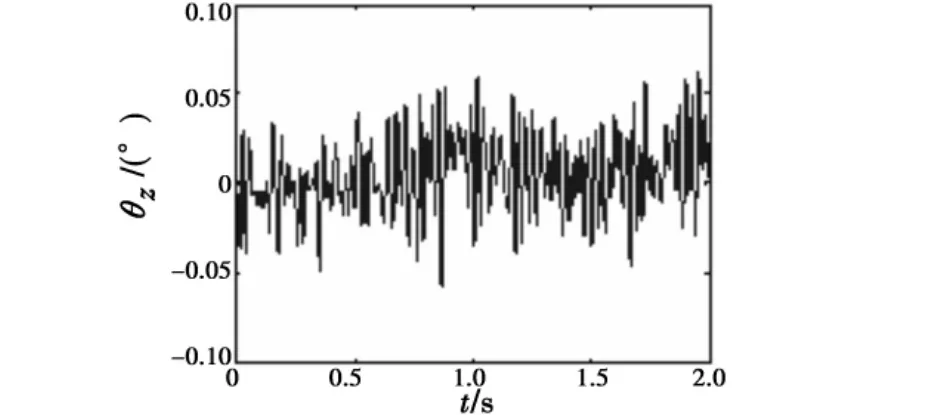
圖8 天線指向誤差(俯仰通道)Fig.8 Antenna pointing error(elevation)
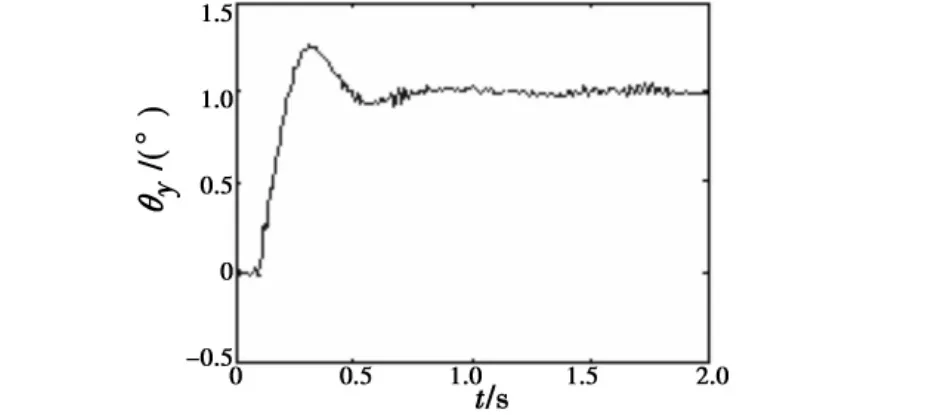
圖9 天線空間指向(航向通道)Fig.9 Antenna pointing direction(azimuth)
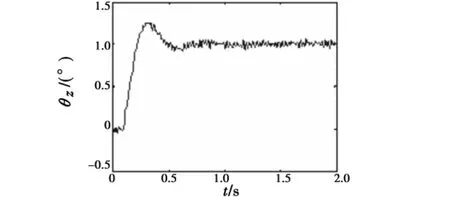
圖10 天線空間指向(俯仰通道)Fig.10 Antenna pointing direction(elevation)
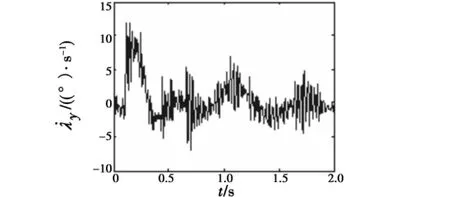
圖11 框架角速度(航向通道)Fig.11 Gimbal angular rate(azimuth)
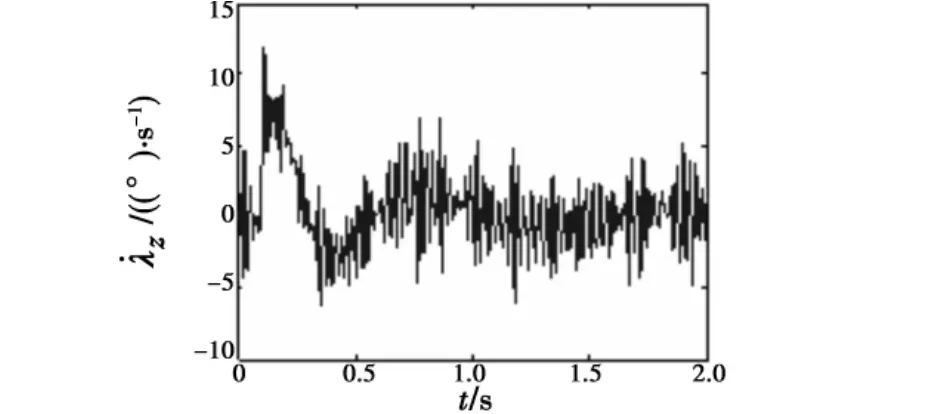
圖12 框架角速度(俯仰通道)Fig.12 Gimbal angular rate(elevation)
4 結(jié)論
在捷聯(lián)末制導(dǎo)系統(tǒng)中,導(dǎo)引頭中取消了陀螺,天線穩(wěn)定系統(tǒng)中所需的空間絕對角速度信息無法直接測量,此時可以利用彈上捷聯(lián)慣導(dǎo)給出的彈體姿態(tài)運動信息,以及導(dǎo)彈、導(dǎo)引頭、天線之間的相對運動關(guān)系,使用運動合成方法來重構(gòu)天線空間運動信息,最終實現(xiàn)天線平臺的間接穩(wěn)定,這就是基于角速度補償?shù)慕萋?lián)天線穩(wěn)定方案。捷聯(lián)天線穩(wěn)定系統(tǒng)本質(zhì)上是一種數(shù)學(xué)穩(wěn)定平臺,其核心是基于DSP的解算控制模塊,它包括伺服系統(tǒng)校正網(wǎng)絡(luò)、穩(wěn)定回路反饋量計算、視線角速度估算3種功能。
因為導(dǎo)彈彈體同時存在俯仰、航向、滾動3個通道姿態(tài)運動,導(dǎo)引頭天線伺服系統(tǒng)也同時進行俯仰、航向兩個通道的運動,這樣實際的天線空間運動合成關(guān)系就不能按照的簡單關(guān)系來表示,需要根據(jù)坐標(biāo)變換關(guān)系和運動合成原理通過數(shù)學(xué)解算來獲取,同時用于制導(dǎo)的目標(biāo)視線角速度信息也可以通過數(shù)學(xué)方法間接提取。
在理想條件下,當(dāng)陀螺通道與測速環(huán)節(jié)的傳遞函數(shù)完全匹配時,捷聯(lián)穩(wěn)定方案可以獲得與陀螺穩(wěn)定方案完全等效的控制效果,但是實際的測速環(huán)節(jié)動態(tài)特性一般都比陀螺系統(tǒng)要快,所以需要設(shè)計適當(dāng)?shù)钠ヅ錇V波器來平衡二者特性。此外,捷聯(lián)算法中需要對伺服框架角λ進行微分運算,這將會放大傳感器的測量噪聲,需要采用高精度低噪聲的測角元件,對傳感器輸出進行濾波處理以克服噪聲的影響。
[1]RUDIN R T.Strapdown stabilization for imaging seekers[R].AIAA-93-2660,1993:1-10.
[2]KENNEDY P J,KENNEDY R L.Direct versus indirect Line of Sight(LOS)stabilization[J].IEEE Trans on Control System Technology,2003,11(1):3-15.
[3]周瑞青,呂善偉,劉新華.捷聯(lián)式天線平臺的角跟蹤系統(tǒng)設(shè)計[J].系統(tǒng)工程與電子技術(shù),2003,25(10):1200-1202.
[4]周瑞青,呂善偉,劉新華.捷聯(lián)式天線平臺的穩(wěn)定性研究[J].北京航空航天大學(xué)學(xué)報,2003,29(6):509-511.
[5]張聘義,祁載康,崔瑩瑩.一種匹配濾波方法在導(dǎo)引頭捷聯(lián)穩(wěn)定平臺中的應(yīng)用研究[J].紅外技術(shù),2005,27(1):6-11.
[6]周瑞青,呂善偉,劉新華.彈載捷聯(lián)式天線平臺兩種穩(wěn)定實現(xiàn)方法的比較[J].系統(tǒng)工程與電子技術(shù),2005,27(8):1397-1400.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
