不同尾翼鴨式布局遠程彈在跨/超聲速的氣動特性實驗研究
2010-04-15 10:55:02陳少松譚獻忠
實驗流體力學(xué) 2010年2期
關(guān)鍵詞:模型
鄧 帆,陳少松,譚獻忠,徐 濤
(1.南京理工大學(xué)動力工程學(xué)院,南京 210094;2.南京模擬技術(shù)研究所,南京 210016)
0 引 言
炮射的遠程彈由于結(jié)構(gòu)的制約需要采用鴨式布局外形,為了提高滑翔增程的效率,舵面最好始終呈×形布置飛行,這就要求在彈道的滑翔段進行滾轉(zhuǎn)控制,而鴨式布局條件下的滾轉(zhuǎn)控制是彈箭氣動布局研究的難點[1],鴨舵引起的非對稱下洗流場在尾翼上產(chǎn)生反效誘導(dǎo)滾轉(zhuǎn)力矩,隨著布局形式、馬赫數(shù)以及迎角的變化其影響程度不同。通常滾轉(zhuǎn)反效主要發(fā)生在跨聲速和低超聲速范圍內(nèi),而遠程彈的滑翔控制正是在高亞聲速、跨聲速和低超音速段,因而有部分速度處于滾轉(zhuǎn)控制反效范圍內(nèi)。鴨式布局的設(shè)計對減小這種滾轉(zhuǎn)反效有一定的作用[1,4],采用“斷牙”形狀的鴨舵或者是在鴨舵前布置翼前小翼對于減小滾轉(zhuǎn)反效是有利的,鴨舵在彈身上的位置對滾轉(zhuǎn)反效也有影響;尾翼對鴨舵引起的滾轉(zhuǎn)反效影響很大,在俯仰控制允許的條件下,減少尾翼的展長對減小滾轉(zhuǎn)反效是有利的,在尾翼上添加副翼或是沿尾翼展向吹氣都是有效的辦法,但是對于尺寸相對較小又要進行滑翔的遠程彈來說這些方法實現(xiàn)起來有困難;自旋尾翼在鴨舵下洗產(chǎn)生的反效滾轉(zhuǎn)力矩作用下旋轉(zhuǎn)從而不會使其傳遞到彈身上,是克服鴨舵下洗的好方法,“T”型尾翼上的小翼能起到副翼的作用,也能有效減少下洗誘導(dǎo)滾轉(zhuǎn)力矩,提高鴨舵的滾動控制效率[2-5],但是“T”型尾翼的形式多樣,減少下洗誘導(dǎo)滾轉(zhuǎn)力矩的效果不盡相同;柵格翼是一種新型的彈翼,它由很多柵格組成,氣動特性規(guī)律比較獨特,將柵格翼作為鴨式布局尾翼的可行性值得研究[6,7]。
設(shè)計了一種“T”型尾翼和一種柵格尾翼鴨式布局模型,為了研究兩種模型的氣動特性,特別是滾轉(zhuǎn)控制氣動特性,還設(shè)計了無尾翼鴨式布局模型,通過風(fēng)洞測力實驗研究了三種模型的氣動特性,特別是對“T”型尾翼和柵格尾翼鴨式布局的滾轉(zhuǎn)特性與無尾翼模型的滾轉(zhuǎn)特性進行了比較,同時對縱向氣動特性的變化也進行了詳盡的分析,力求在減小鴨式布局誘導(dǎo)滾轉(zhuǎn)力矩的同時,盡量不改變其縱向氣動特性。研究結(jié)果對提高遠程彈的滑翔增程效率有重要的參考價值。
1 實驗方法
實驗是在南京理工大學(xué)HG-4號風(fēng)洞中進行的。HG-4號風(fēng)洞為直流下吹暫沖式閉口超聲速風(fēng)洞,實驗段截面尺寸為300mm×300mm,實驗段長為600mm;風(fēng)洞有迎角機構(gòu),用于支撐天平和模型,并用來改變模型迎角;實驗段兩側(cè)開有290mm×160mm的光學(xué)玻璃觀察窗,供在實驗過程中觀察模型姿態(tài)或進行紋影照相;并配有六分量天平、紋影儀以及常規(guī)實驗設(shè)備,采用更換噴管的方式改變馬赫數(shù)。
實驗采用六分量氣動天平,將模型安裝在天平支架上,天平支撐于迎角機構(gòu)上,這樣可以實現(xiàn)一次吹風(fēng)過程中連續(xù)改變迎角,迎角a變化范圍-4°~8°,實驗馬赫數(shù)的范圍0.8~2.5。
2 實驗?zāi)P?/h2>2.1 無尾模型
設(shè)定未安裝彈尾的模型代號為W,舵片采用俯仰舵和差動舵的組合,俯仰舵水平放置,差動舵舵片凈展長為27.2mm,,規(guī)定從左視圖方向看去上鴨舵右偏(此時下鴨舵左偏)時δ為正,反之為負,一般正的差動偏角產(chǎn)生負的滾轉(zhuǎn)力矩,3個模型的舵偏角δ均為-10°,兩組舵片厚度均為0.8mm,具體參數(shù)見圖1。
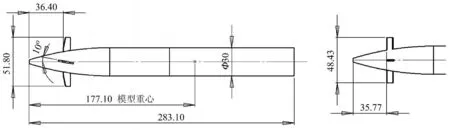
圖1 W模型工程示意圖(上視圖及彈頭前視圖)Fig.1 The engineering drawing of model W(top view and front view of the missile′s head)
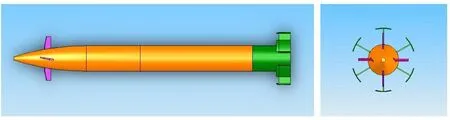
圖2 T模型安裝姿態(tài)示意圖Fig.2 The sketch of model T
2.2 “T”型尾翼模型
設(shè)定W模型加接上長45mm的尾部,尾翼為“T”型翼的組合模型代號為T,如圖2。尾翼采用6片的“T”型尾翼,具體參數(shù)見表1。
2.3 柵格尾翼模型
設(shè)定W模型加接上長45mm的尾部,尾翼為柵格翼的組合模型代號S,如圖3。尾翼采用4片柵格翼,柵格翼中心剖面距彈底為7mm,具體參數(shù)見表2。
參考面積取彈體最大橫截面積,S=706.86 mm2,參考長度取全彈長,l=328.1mm,全彈俯仰力矩系數(shù)的參考點取彈質(zhì)心,滾轉(zhuǎn)力矩系數(shù)的參考點取彈體軸。
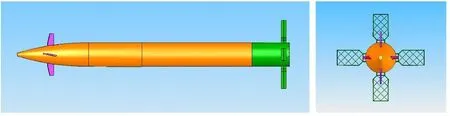
圖3 S模型安裝姿態(tài)示意圖Fig.3 The sketch of model S

表1 “T”型尾翼基本參數(shù)表Table 1 Basic parameters of“T”shaped fins

表2 柵格尾翼基本參數(shù)表Table 2 Basic parameters of grid fins
3 實驗結(jié)果和分析
3.1 阻力特性
圖4給出的是三種模型的阻力系數(shù)CD在α=4°狀態(tài)下隨馬赫數(shù)的變化曲線。從圖中可見,三種模型的阻力系數(shù)CD隨馬赫數(shù)先增加再減小,在Ma=1時達到最大值,跨聲速階段的阻力系數(shù)值高于超聲速階段,這是由于波阻的影響;W模型的阻力系數(shù)最小,因為此模型無尾翼,迎風(fēng)面積小于其他兩個模型;S模型柵格尾翼的迎風(fēng)面積為332mm2,T模型“T”型尾翼的迎風(fēng)面積為218mm2,柵格翼的迎風(fēng)面積遠大于“T”型翼,由圖4可知S模型的阻力系數(shù)CD約高于T模型67%;與“T”型翼不同的是,柵格翼由于自身的特殊柵格結(jié)構(gòu)所以阻力系數(shù)相對較大,超聲速后,W模型和T模型的阻力系數(shù)都緩慢下降,而S模型的阻力系數(shù)在Ma=2后基本保持不變,對于柵格翼來說,阻力大一直是需要解決的問題。
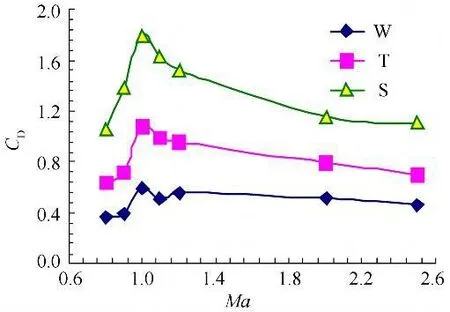
圖4 α=4°,CD隨Ma變化曲線Fig.4 CDvs Mach(α=4°)
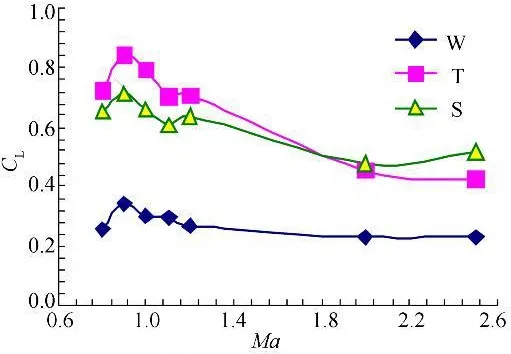
圖5 α=4°,CL隨Ma變化曲線Fig.5 CLvs Mach(α=4°)
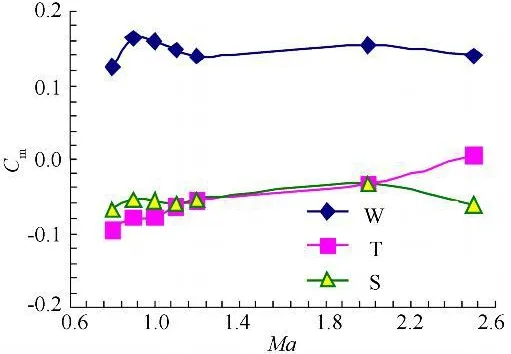
圖6 α=4°,Cm隨Ma變化曲線Fig.6 Cmvs Mach(α=4°)
3.2 升力特性
圖5給出的是三種模型的升力系數(shù)CL在α=4°狀態(tài)下隨馬赫數(shù)的變化曲線。由圖可見三種模型的升力系數(shù)CL在Ma=0.9時達到最大值,超聲速階段W模型和T模型的升力系數(shù)都呈減小的趨勢,而S模型的升力系數(shù)在Ma=2后開始逐漸回升;W模型升力最小,T模型和S模型的升力系數(shù)相差無幾,在跨聲速區(qū)域內(nèi),T模型的升力系數(shù)略大于S模型;而在超聲速區(qū)域,情況剛好相反。由于柵格翼的結(jié)構(gòu)比“T”型翼復(fù)雜得多,柵格壁之間存在的相互影響使得S模型在跨聲速時彈體周圍流場更加復(fù)雜,產(chǎn)生的激波封口造成氣流壅塞,使得升力系數(shù)較小;超聲速階段,當(dāng)馬赫數(shù)達到一定值使得柵格翼的激波脫出柵格邊框,不再在柵格內(nèi)部反射后,柵格翼的升力系數(shù)回升,表現(xiàn)出比“T”型翼更好的升力特性。
3.3 俯仰力矩特性
圖6給出的是三種模型的俯仰力矩系數(shù)Cm在α=4°狀態(tài)下隨馬赫數(shù)的變化曲線。由圖可見在正迎角下T模型和S模型的俯仰力矩系數(shù)為負值,而W模型相反;圖7顯示Ma=2時T模型和S模型的俯仰力矩系數(shù)都隨迎角增大而減小,大部分迎角下 T模型俯仰力矩系數(shù)絕對值略大于S模型;當(dāng)馬赫數(shù)繼續(xù)增大,如圖8所示,在Ma=2.5時,T模型的俯仰力矩系數(shù)變化幅度很小,并且俯仰力矩特性曲線對于橫坐標(biāo)軸的斜率近似為零,俯仰力矩系數(shù)開始變?yōu)檎?說明T模型轉(zhuǎn)為縱向靜中立穩(wěn)定,而S模型的俯仰力矩系數(shù)仍為負值,并且絕對值增大,靜穩(wěn)定裕度還略有增加,說明柵格翼在超聲速階段的縱向靜穩(wěn)定性優(yōu)于“T”型翼。
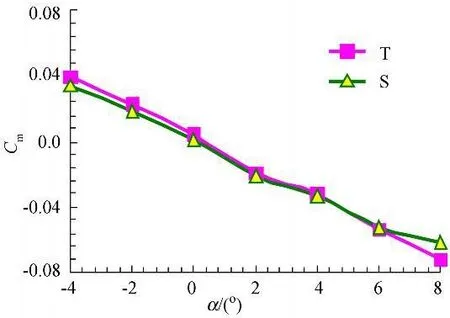
圖7 Ma=2.0,Cm隨α變化曲線Fig.7 Cmvs attack angles(Ma=2.0)
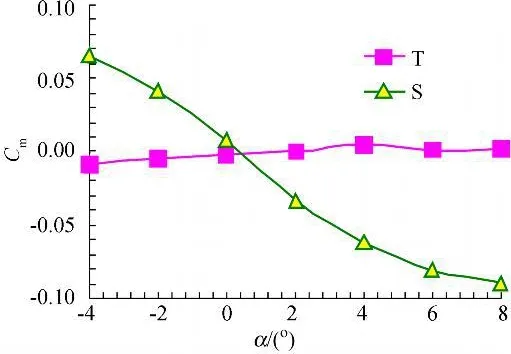
圖8 Ma=2.5,Cm隨α變化曲線Fig.8 Cmvs attack angles(Ma=2.5)
3.4 滾轉(zhuǎn)力矩特性
圖9給出的是三種模型的滾轉(zhuǎn)力矩系數(shù)Cl在α=4°狀態(tài)下隨馬赫數(shù)的變化曲線。W模型的設(shè)計是為了與另二組有尾翼模型做對比,由圖可見W模型的滾轉(zhuǎn)力矩系數(shù)均為正值,在Ma=1時達到最大,然后隨著馬赫數(shù)的增加而逐漸減小;T模型的滾轉(zhuǎn)力矩系數(shù)在跨聲速階段出現(xiàn)負值,與鴨舵滾轉(zhuǎn)控制力矩方向相反,并且在超聲速時隨著馬赫數(shù)的增加其滾轉(zhuǎn)力矩系數(shù)再次減小,到Ma=2.5后值為負,滾轉(zhuǎn)力矩系數(shù)小于同迎角下W模型的值,W模型滾轉(zhuǎn)力矩系數(shù)均為正值說明此模型可以很好地進行滾轉(zhuǎn)控制,因為沒有尾翼,鴨舵差動偏轉(zhuǎn)進行滾轉(zhuǎn)控制時產(chǎn)生的不對稱下洗流場對自身無影響;安裝“T”型尾翼后,在跨聲速區(qū)域的小迎角范圍內(nèi)出現(xiàn)滾轉(zhuǎn)控制反效的情況,其他情況下都可以有效的控制滾轉(zhuǎn)。
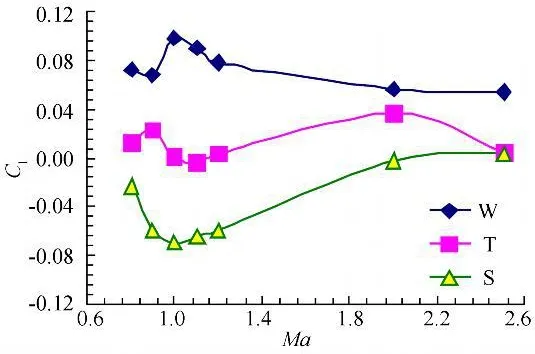
圖9 α=4°,Cl隨Ma變化曲線Fig.9 Clvs Mach(α=4°)
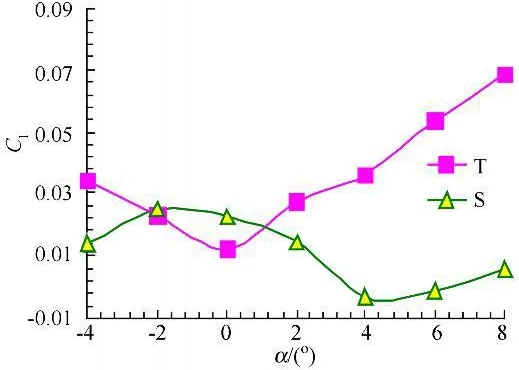
圖10 Ma=2.0,Cl隨α變化曲線Fig.10 Clvs attack angles(Ma=2.0)
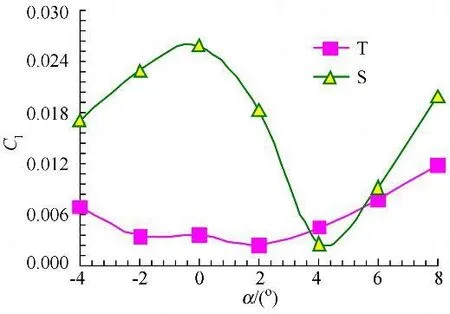
圖11 Ma=2.5,Cl隨α變化曲線Fig.11 Clvs attack angles(Ma=2.5)
跨聲速階段T模型和S模型的滾轉(zhuǎn)力矩系數(shù)有正值也有負值,大部分迎角下T模型的滾轉(zhuǎn)力矩系數(shù)大于S模型,因此T的滾轉(zhuǎn)控制性能優(yōu)于S模型;超聲速階段二者的滾轉(zhuǎn)力矩系數(shù)隨著馬赫數(shù)的增加,T模型的優(yōu)勢逐漸減小。如圖10和11所見,當(dāng)Ma=2時,T模型的滾轉(zhuǎn)控制性能在α=0°取得最小值,但從整個迎角范圍來看優(yōu)于S,當(dāng)Ma=2.5時,大部分迎角下S模型更利于滾轉(zhuǎn)控制。由此可見,“T”型尾翼與柵格尾翼各有所長,在其他條件相同的情況下,Ma≤2.0時,適合選擇“T”型尾翼,Ma>2.0時,柵格尾翼更利于滾轉(zhuǎn)控制。值得注意的是,在跨聲速階段,雖然兩者均產(chǎn)生滾轉(zhuǎn)反效,但柵格尾翼產(chǎn)生的反效一致,“T”型尾翼反效不一致,從而采用柵格尾翼可以利用其在跨聲速階段反效一致的特性進行反向的滾轉(zhuǎn)控制;在整個馬赫數(shù)階段,柵格翼在迎角α=4°時滾轉(zhuǎn)力矩系數(shù)最小,α<2°柵格翼對滾轉(zhuǎn)力矩的控制效率較高。
4 結(jié) 論
通過風(fēng)洞實驗,研究了3種不同尾翼的鴨式布局遠程彈的氣動特性,尤其是滾轉(zhuǎn)控制方面的性能,得出如下結(jié)論:
(1)無尾翼模型阻力小,能進行有效的滾轉(zhuǎn)控制,但喪失了尾翼提供的升力。帶“T”型尾翼的模型,升力和阻力都較大,但在跨聲速階段的小迎角區(qū)域難以進行滾轉(zhuǎn)控制;
(2)“T”型尾翼模型和柵格尾翼模型相比,在跨聲速階段其升力特性優(yōu)于柵格尾翼,也更利于滾轉(zhuǎn)控制,超聲速階段柵格尾翼模型具有升力特性優(yōu)勢,同時也容易進行滾轉(zhuǎn)控制,缺點是阻力較大;
(3)在跨聲速階段,雖然“T”型尾翼和柵格尾翼均產(chǎn)生滾轉(zhuǎn)反效,但柵格尾翼產(chǎn)生的反效一致,T型尾翼反效不一致,從而可以利用柵格尾翼在跨聲速階段滾轉(zhuǎn)反效一致的特性進行反向的滾轉(zhuǎn)控制。
[1]BURT J R.The effectiveness of canards for roll control[R].AD/A 037077,1976.
[2]AUMAN L M.Aerodynamic characteristics of a canardcontrolled missile with a free-spining tail[R].AIAA98-0410,1998.
[3]BLAIR A B JR.Romote control canard missile with a free-rolling tail brake torque system[J].Journal of spacecraft and rockets,1981,18(6):550-555.
[4]曾廣存,丁慶國,秦伊賢等.鴨式布局導(dǎo)彈滾動氣動控制方案及力矩分析[J].空氣動力學(xué)學(xué)報,1988,6(3):376-381.
[5]雷娟棉,居賢銘,吳甲生.自旋尾翼鴨式布局導(dǎo)彈的滾轉(zhuǎn)特性[J].北京理工大學(xué)學(xué)報,2004,24(8):657-659.
[6]DESPIRITO J.CFD investigation of canard-controlled missile with planar and grid fins in supersonic flow[R].AIAA 2002-4509,2002.
[7]DESPIRITO J.Subsonic flow CFD investigation of canard-controlled missile with planar and grid fins[R].AIAA 2003-0027,2003.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19