殘疾人用Partial Finger機構(gòu)研究
2010-03-24 06:10:02楊會生劉伊威
哈爾濱工業(yè)大學(xué)學(xué)報 2010年9期
楊會生,姜 力,劉伊威,劉 宏
(哈爾濱工業(yè)大學(xué)機器人研究所,哈爾濱150001,yanghuisheng@126.com)
近年來,仿人型殘疾人假手的研究已經(jīng)成為生物醫(yī)學(xué)工程及機器人學(xué)科的一個熱點方向.隨著機器人靈巧手技術(shù)的飛速發(fā)展,單自由度、三自由度、五自由度、多自由度殘疾人假手相繼出現(xiàn).比較有代表性的有Otto Bock手、TBM手、HIT/ DLRⅢⅣ型假手、i-LIMB手、FluidHand手、惠普金斯大學(xué)假手[1-8].這些假手在外形、重量、自由度配置和感知功能方面都具有了某些方面的改進,但是上述假手的研究還主要集中在臂部骨骼離斷的全手階段,它們安裝時要求上肢殘疾人患者全手殘疾,并且對小臂殘肢長度有一定要求.針對手部骨骼殘疾的研究較少,特別是掌骨和指骨離斷的研究,因為其有效利用體積小,擬人化要求高,基本處于空白狀態(tài).據(jù)業(yè)內(nèi)人士調(diào)查顯示,手殘患者中有相當(dāng)一部分不是整手殘疾,而是部分手殘疾,所以針對部分手殘疾的假手的研究日益迫切[9-10].
本文針對手指基指節(jié)(第一指骨)離斷的殘疾人患者,設(shè)計了一種結(jié)構(gòu)簡單,安裝簡便快捷,外觀形象逼真,運動方式擬人化的殘疾人用Partial Finger.有效地解決了現(xiàn)在沒有適用于手指基指節(jié)殘存患者能夠使用的功能型假肢問題.
1 Partial Finger結(jié)構(gòu)設(shè)計
1.1 手部殘疾類型和手指基指節(jié)離斷結(jié)構(gòu)分析
普通人手是由5個手指構(gòu)成,每個手指都有很多骨骼組成,手指各個關(guān)節(jié)的運動是通過與之直接相連的肌肉或筋腱的相應(yīng)收縮、伸展運動實現(xiàn)的,圖1為人手骨骼構(gòu)造簡圖[11],掌骨與手腕骨相連,手腕骨通過腕關(guān)節(jié)與小臂相連.醫(yī)學(xué)上針對手部殘疾類型有腕關(guān)節(jié)離斷、手腕骨截斷、手掌骨截斷、第一節(jié)指骨截斷、第二節(jié)指骨截斷、第三節(jié)指骨截斷等類型,小臂和上臂及對應(yīng)關(guān)節(jié)的離斷也與手掌有關(guān).研究證明,手指第二、三指骨截斷基本不影響手指的正常功能,可以安裝裝飾型假肢,但是基指節(jié)(第一指節(jié)指骨)離斷將嚴重影響手指的正常功能,需要安裝功能性假肢來彌補手指功能.人手每個手指有3個關(guān)節(jié),基關(guān)節(jié)有兩個自由度(側(cè)擺運動和張合運動),其余關(guān)節(jié)只有一個自由度(張合運動),因為手指基指節(jié)的驅(qū)動肌肉在手掌內(nèi),所以手指基指節(jié)離斷后,殘余基指節(jié)依然保留了原來的運動能力,如果利用得當(dāng),可以驅(qū)動假手指實現(xiàn)擬人化運動.
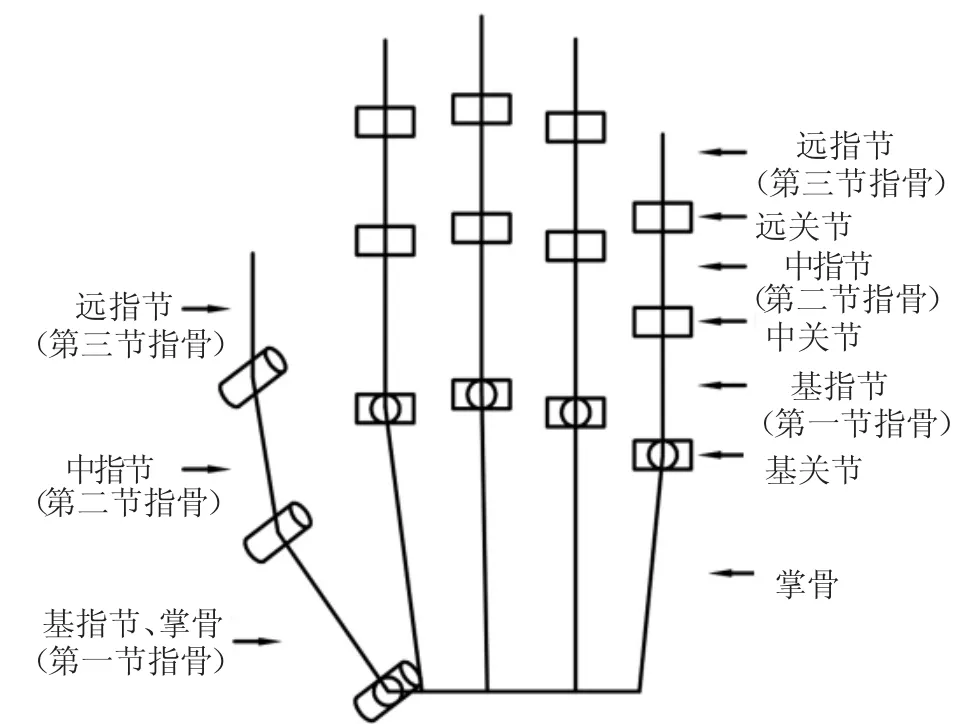
圖1 人手骨骼構(gòu)造簡圖
1.2 Partial Finger的整體結(jié)構(gòu)
考慮到假手指應(yīng)用普遍性,本文所研制的Partial Finger樣機以人手指有效利用體積最小、實現(xiàn)難度最高的小指為基準,并預(yù)留外包裝指套的空間.Partial Finger由假手指連接部分(手掌部分)、基指節(jié)、中指節(jié)、遠指節(jié)4部分組成,其結(jié)構(gòu)圖見圖2,各指節(jié)具體尺寸參數(shù)見表1.Partial Finger三指節(jié)采用全耦合結(jié)構(gòu),分別選取手指自然伸展和完全合攏為初始狀態(tài),設(shè)計假手指各指節(jié)的運動空間,為了模仿人手指的運動狀態(tài),采用近似定傳動比來設(shè)計各指節(jié)四桿機構(gòu)的尺寸參數(shù),最終確定基關(guān)節(jié)與中關(guān)節(jié)近似9∶10傳動,中關(guān)節(jié)與遠關(guān)節(jié)近似4∶3傳動.各指節(jié)運動范圍見表2.基指節(jié)與中指節(jié)初始角度為5°,中指節(jié)與遠指節(jié)初始角度為0°.
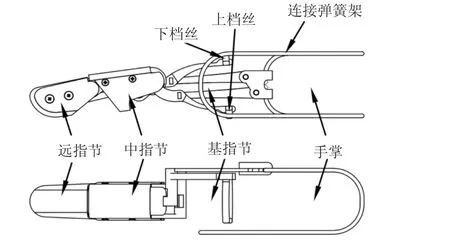
圖2 Partial Finger結(jié)構(gòu)圖
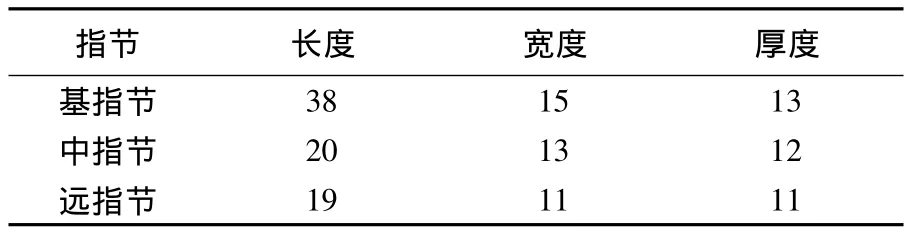
表1 假手指外形尺寸 mm
假手指通過連接彈簧架的彈性將假手指連接到手掌上,連接彈簧架的圓弧與手指的虎口接觸定位.連接彈簧架與基指節(jié)四桿機構(gòu)的基座軸向固定、周向轉(zhuǎn)動,模擬手指基關(guān)節(jié)的側(cè)擺自由度,上下檔絲分別與基指節(jié)四桿機構(gòu)的上下連桿固連,通過對假手指參數(shù)進行優(yōu)化,可使上下檔絲在假手指開合運動整個過程中近似包絡(luò)出殘余基指節(jié)的形狀,并且保證殘余基指節(jié)在任意位置與上下檔絲接觸,從而驅(qū)動假手指開合.

表2 假手指各關(guān)節(jié)運動范圍 (°)
1.3 耦合四桿機構(gòu)參數(shù)確定
假手指開合機構(gòu)采用全耦合的原理設(shè)計,基指節(jié)四桿機構(gòu)和中指節(jié)四桿機構(gòu)原理基本相同,將基指節(jié)四桿機構(gòu)中的兩個桿與中指節(jié)四桿機構(gòu)中的兩個桿固連,可將基指節(jié)運動耦合到中指節(jié),將遠指節(jié)與中指節(jié)的一個桿固連,可將中指節(jié)運動耦合到遠指節(jié).
圖3為近指節(jié)四桿機構(gòu),假手指合攏運動時l4為基座,l1為主動桿,l3為中間桿傳動桿,l2為從動桿;假手指張開運動時l4為基座,l3為主動桿,l1為中間傳動桿,l2為從動桿.在假手指開合運動過程中,同時l1與l2是與中指節(jié)四桿機構(gòu)的耦合連桿,所以角β也是中指節(jié)四桿機構(gòu)的驅(qū)動角.
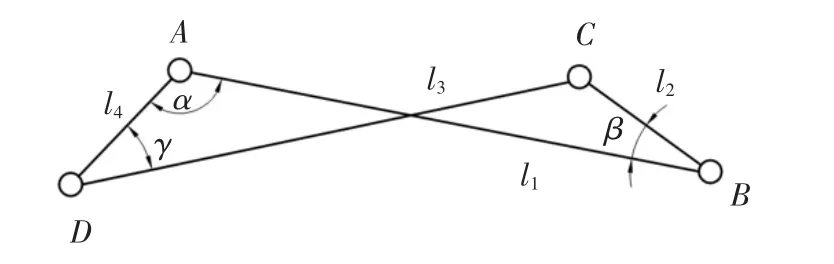
圖3 近指節(jié)四桿機構(gòu)簡圖
以手指合攏運動為例設(shè)計基指節(jié)四桿機構(gòu)各桿參數(shù),手指張開可視為合攏運動的逆運動.由上述分析可知,在手指的運動過程中,l4可視為手掌,l1可視為基指節(jié),l2可視為中指節(jié).所以角α(主動旋轉(zhuǎn)角∠BAD)的增量Δα就是基關(guān)節(jié)的運動角度,同理,角β(耦合旋轉(zhuǎn)角∠CBA)的增量Δβ就是中關(guān)節(jié)的運動角度.基指節(jié)與中指節(jié)的旋轉(zhuǎn)方向一致,所以Δα為負,Δβ為正,為實現(xiàn)基指節(jié)與中指節(jié)近似定傳動比運動,在運動過程中應(yīng)有-Δα≈n×Δβ(n為基關(guān)節(jié)與中關(guān)節(jié)傳動比).為保證基指節(jié)開合運動的對稱性,在運動過程中∠BAD的變化量Δα與∠ADC的變化量Δγ近似相等,即有-Δα≈Δγ.
由人手指大小的要求及結(jié)構(gòu)尺寸限制,可確定指節(jié)長度和某些桿的長度范圍.在參數(shù)確定的過程中,首先可以確定的是l1和l4,為了得到最優(yōu)化的各桿參數(shù),本文根據(jù)實際情況取l2∈[l4-2,l4-2].此外,四連桿機構(gòu)中需要確定的參數(shù)還有角α和角β的初始值α0和β0.考慮到傳遞效率和關(guān)節(jié)運動范圍,有
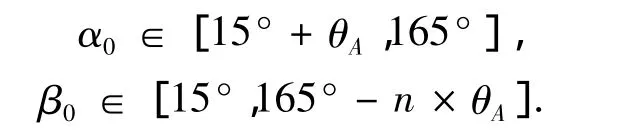
式中:θA是∠BAD的運動范圍,n為基關(guān)節(jié)與中關(guān)節(jié)傳動比,考慮到實際加工水平,l2的最小搜索步長為0.1 mm,α0和β0的最小搜索步長為0.5°,利用matlab進行三層嵌套循環(huán),從而可計算得連桿l3的一系列長度值:

本文在設(shè)計連桿的過程中,以-Δα與n×Δβ角度差δ1及-Δα與Δγ的角度差δ2的和為主要參考指標.要求當(dāng)主動角α從初始角度開始,在0~θA的運動范圍內(nèi),δ1+δ2的統(tǒng)計值(均值E(δ1+δ2)、方差D(δ1+δ2))最小.

式中:n1為主動角α在運動區(qū)間內(nèi)采樣點的數(shù)目,δ=δ1+δ2,δk=δ1k+δ2k.
在傳動過程中,可以得到α,β,α0,β0與δ的函數(shù)關(guān)系:

經(jīng)過Matlab仿真計算,得出以下一組最優(yōu)參數(shù)l1=33.5 mm,l2=5.5 mm,l3=32.3 mm,l4=6 mm,α0=117°,β0=26.5°.
中指節(jié)四桿機構(gòu)如圖4所示,l'1和l'4與基指節(jié)四桿機構(gòu)耦合,l'2與遠指節(jié)耦合.∠B'A'D'的變化量Δα'與Δα大小相同,方向相反.∠C'B'A'的變化量Δβ'是遠關(guān)節(jié)的運動角,為保證中指節(jié)與遠指節(jié)運動角度近似等比例,應(yīng)有Δα'=-n'× Δβ'(n'為基指節(jié)與遠指節(jié)的傳動比).
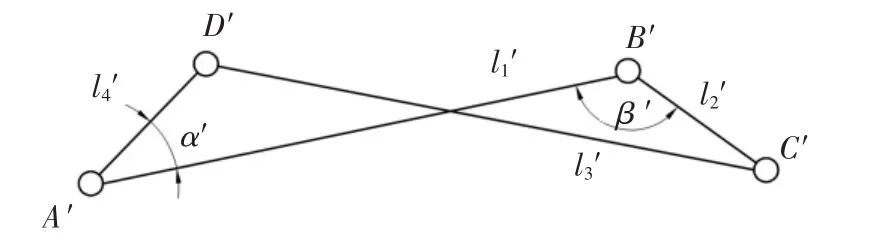
圖4 中指節(jié)四桿機構(gòu)簡圖
經(jīng)過Matlab計算,得出以下一組最優(yōu)參數(shù): l'1=15 mm,l'2=5 mm,l'3=12.9 mm,l'4= 3.9 mm,α'0=17°,β'0=90.5°.
利用Matlab將上述參數(shù)帶入,測得各關(guān)節(jié)運動角度誤差如圖5所示,結(jié)果表明基關(guān)節(jié)最大傳動誤差0.59°,中關(guān)節(jié)最大傳動誤差0.63°.
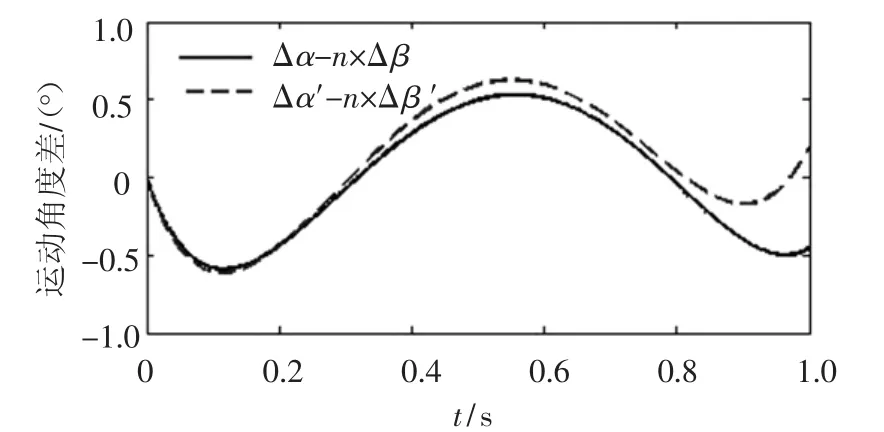
圖5 關(guān)節(jié)運動誤差
2 Partial Finger的運動學(xué)分析
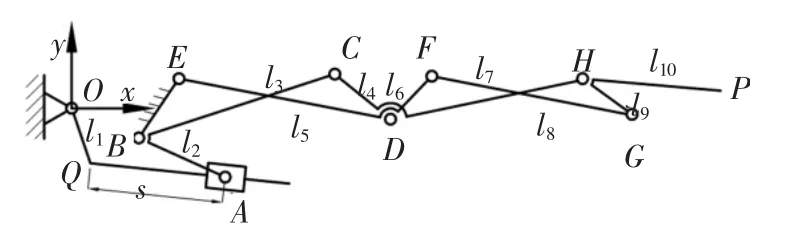
圖6 假手指合攏機構(gòu)簡圖
因為假手指開合運動的運動互逆,假手指的運動學(xué)分析以合攏運動為例.在假手指合攏運動過程中,殘余基指節(jié)與基指節(jié)四桿機構(gòu)的下?lián)踅z(詳見圖2)保持接觸,可將接觸面近似看作線接觸,則殘余基指節(jié)與下?lián)踅z既存在轉(zhuǎn)動又存在滑動,可以用一個滑動副加一個轉(zhuǎn)動副代替,則假手指合攏運動的機構(gòu)簡圖如圖6所示.O點既是坐標原點,也是基指節(jié)的關(guān)節(jié)點,lAQ是殘余基指節(jié)的下表面.利用桿組法將圖6劃分為Ⅰ級機構(gòu)AQ、RRPⅡ級基本桿組AAB、Ⅰ級機構(gòu)BC、RRRⅡ級基本桿組EDC、Ⅰ級機構(gòu)DF、Ⅰ級機構(gòu)DH、RRRⅡ級基本桿組FGH、Ⅰ級機構(gòu)HP.設(shè)殘余基指節(jié)與x軸夾角為φ1,角速度為ω1,角加速度α1,則各點各桿的所有運動參數(shù)全部可求,將關(guān)鍵桿和重要點的運動參數(shù)進行定量分析,對照圖6關(guān)鍵桿有基指節(jié)桿l5、中指節(jié)桿l7、遠指節(jié)桿l10,重要點有中關(guān)節(jié)點D、遠關(guān)節(jié)點H、遠指節(jié)指尖點P、下?lián)踅z點A,還有A與Q的相對運動關(guān)系.
圖7所示為假手指各關(guān)節(jié)點的運動軌跡,對比人手指的運動形式可知,假手指具有高度擬人化的運動狀態(tài).
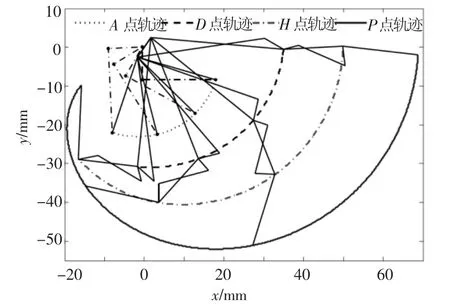
圖7 假手指各關(guān)鍵點運動軌跡
圖8~10為假手指各指節(jié)的運動狀態(tài).由圖中曲線可知,假手指各關(guān)節(jié)以近似定傳動比運動,當(dāng)殘余基指節(jié)勻速運動時,假手指各指節(jié)角加速度很小,近似勻速運動.圖11所示為假手指下?lián)踅z在殘余基指節(jié)上的運動狀態(tài),上圖表明擋絲與殘余基指節(jié)相對運動量較小,相對運動速度很小,所以擋絲對殘余基指節(jié)的磨損量很小,可以利用殘余基指節(jié)長時間驅(qū)動假手指.
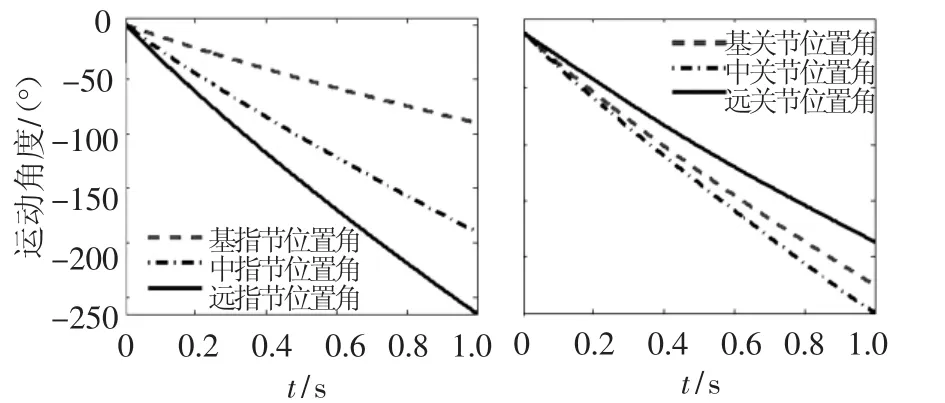
圖8 假手指各指節(jié)運動角
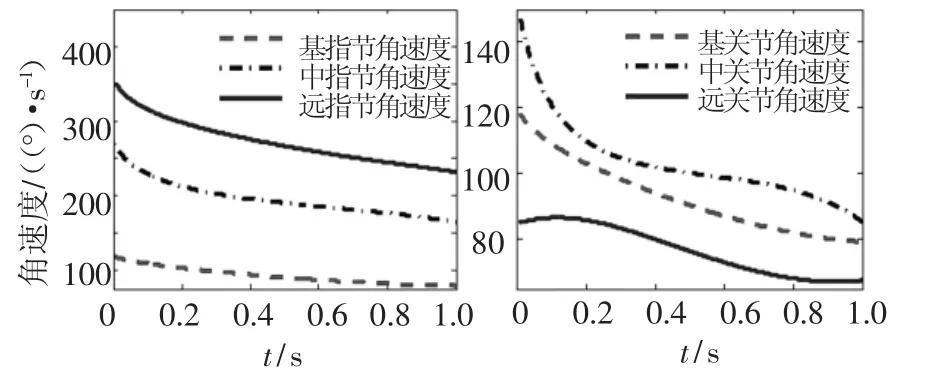
圖9 假手指各指節(jié)運動角速度
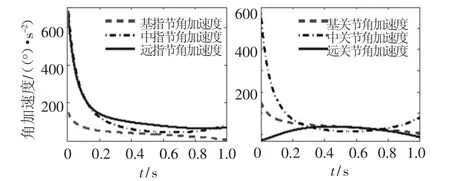
圖10 假手指各指節(jié)運動角加速度
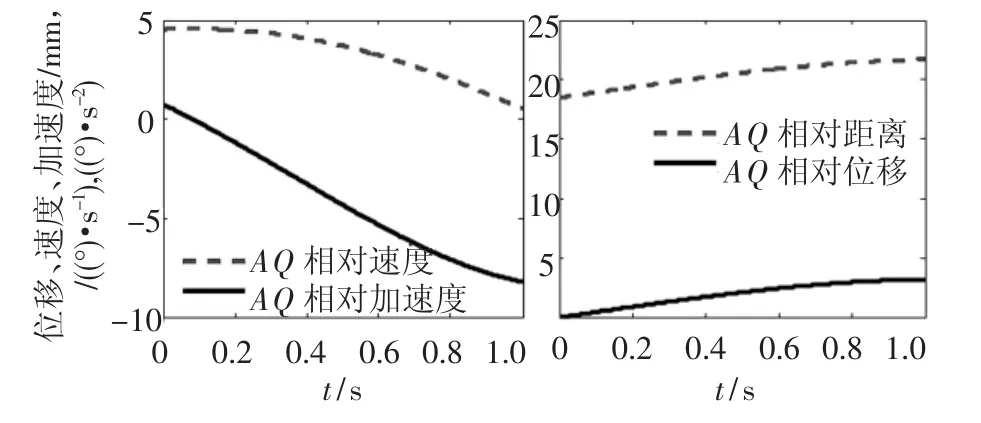
圖11 假手指A相對Q運動關(guān)系
3 Partial Finger的運動實驗
根據(jù)前文所述的結(jié)構(gòu),研制出了Partial Finger樣機,根據(jù)相應(yīng)殘疾類型設(shè)計了殘手實驗裝置,對假手指進行了性能實驗.通過負載實驗驗證,假手指可通過單手拆卸,在只通過連接彈簧架連接時,假手指指尖可承受力為10.7 N,記錄彈簧架狀態(tài),再現(xiàn)于人手掌上,沒有壓迫感;同時進行了5萬次疲勞實驗,在整個實驗過程中,假手指連接可靠,機構(gòu)運動平滑,實驗完畢,殘余基指節(jié)與上下檔絲的磨損量不大;此外,本文還進行了抓取能力實驗,因為沒有其他手指的配合,Partial Finger只能對外形尺寸<25 mm的物體進行操作,但抓取穩(wěn)定、力量可靠,如圖12所示;最后通過對比假手指的運動狀態(tài),特別是假手指始末狀態(tài)與人手自然狀態(tài)(如圖12所示),表明假手指運動方式和外形高度擬人化,配合外包裝手套可以完全滿足殘疾人需要.
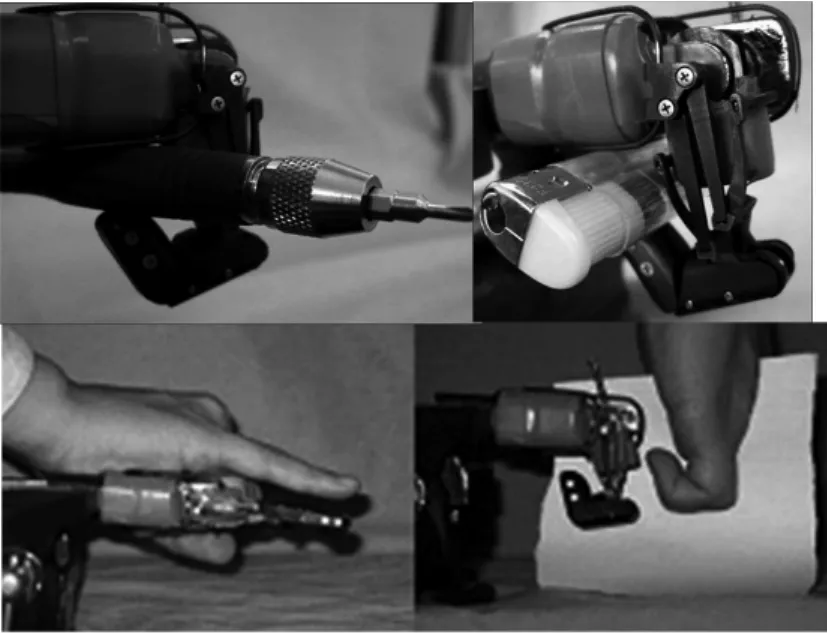
圖12 Partial Finger實驗圖片
4 結(jié)語
1)研制了一種利用被動方式驅(qū)動,采用全耦合機構(gòu)實現(xiàn)手指開合的仿人型殘疾人用Partial Finger,并設(shè)計了相應(yīng)連接機構(gòu).
2)分析了手指基指節(jié)離斷的手部結(jié)構(gòu),利用Matlab設(shè)計了以近似等比例傳動的桿件參數(shù),對假手指的運動學(xué)進行了理論分析,研制了假手指實驗平臺,并對其整體性能進行了驗證.
3)通過多次實驗證明,該假手指結(jié)構(gòu)簡單、可靠,運動靈活、控制方便,可以配合其他手指完成手的近95%功能.
[1]CHAPPEL P H,KYBERD P J.Prehensile control of a hand prosthesis by a microcontroller[J].Journal of biomedical engineering,1991,13(5):363-369.
[2]CARROZZA M C,DARIO P.An Actuator System for a Novel Biomechatronic Prosthetic Hand[C]//In Proceedings of Actuator 2000.Bremen,Germany:[s.n.],2000:276-280.
[3]DECHEV N,CLEGHORN W L.Multiple finger,passive adaptive grasp prosthetic hand[J].Mechanism and Machine Theory,2001,36:1157-1173.
[4]ZHAO Dawei,JIN Minghe.Development of An Underactuated Prosthetic Hand with the Step Motor[J].High Technology Letters,2006,12(4):341-345.
[5]CHRISTINE C,Prosthetic hands from Touch Bionics[J].Industrial Robot,2008,4(35):290-293.
[6]SAITO Y,OGAWA A,NEGOTO,et al.Development of intelligent prosthetic hand adapted to age and body shape[C]//9th International Conference on Rehabilitation Robotics.[S.l.]:ICORR,2005:384-389.
[7]史士財,高曉輝,姜力,等.欠驅(qū)動自適應(yīng)機器人手的研制[J].機器人,2004,26(6):496-502.
[8]ZHAO Jingdong,JIANG Li,SHI Shicai,et al.A Fivefingered Underactuated Prosthetic Hand System[C]// Proceedings of the 2006 IEEE International Conference on Mechatronics and Automation.[S.l.]:ICMA,2006:1453-1458.
[9]陳 光.我國殘疾人用品生產(chǎn)和供應(yīng)概況及發(fā)展趨勢[C]//2001年中國殘疾人康復(fù)論壇專家論文集.北京:華夏出版社,2001:12-17.
[10]王新憲.中國殘疾人康復(fù)事業(yè)的現(xiàn)狀與展望[C]// 2001年中國殘疾人康復(fù)論壇專家論文集.北京:華夏出版社,2001:1-6.
[11]BERGAMASCO M,SCATTARECGIA MARCHES S.The Mechanical Design of the MARCUS Prosthetic hand[C]//IEEE International Workshop on Robot and Human Communication.Tokyo:[s.n.],1995:95-100.