雙足被動行走模型局部穩定性分析
2010-03-24 06:10:16胡運富朱延河臧希喆
哈爾濱工業大學學報 2010年9期
關鍵詞:模型
胡運富,趙 杰,朱延河,臧希喆
(哈爾濱工業大學機器人研究所,哈爾濱150001,huyunfu134@yahoo.com.cn)
相對于傳統機器人而言,被動步行機器人以其結構和控制簡單,步態自然,節能和在非結構化環境中具有更好的移動能力等特點引起廣大學者的極大關注[1].加拿大學者McGeer發現[2-3]:完全不用驅動和控制的機器人也能實現穩定的下坡運動,并提出“被動動力步行”概念.Garcia[4],Collins[5]等對機器人行走的參數匹配問題進行了研究.Grizzle從理論上證明了被動雙足機器人前向運動存在復雜零動態子系統,給出穩定極限環存在的條件[6],并通過Rabbit實現了穩定動態步行[7].當前,穩定性問題嚴重制約了被動機器人的發展,影響被動機器人模型穩定行走的因素很多,同時被動機器人本體的設計必須要建立在其能穩定行走的基礎上.
本文分析了機械參數和斜面坡度對被動行走模型局部穩定性的影響,為后續被動機器人全局穩定性分析以及機器人本體機械參數設計提供指導和理論依據.
1 被動行走模型
所討論的被動行走機器人模型是兩剛性勻質的直腿圓弧足模型,如圖1所示.兩腿通過髖關節相連,髖關節為無質量、無摩擦、無阻尼的被動鉸鏈.這種模型明顯優化于傳統的點足模型,更接近于真實的機器人樣機.每條腿質量為m,其相對質心的轉動慣量為J,腿長均為l,質心距離髖關節的距離為c,圓弧足的足半徑為r,斜面坡度為β.
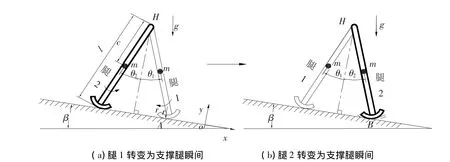
圖1 被動行走模型
當給定初始條件,在重力和自身的慣性作用下,該被動動力模型可沿小坡度的剛性平坦斜面穩定地向下行走.其每一步的運動過程可分為如下兩部分.
1)當擺動腿離開地面時,支撐腿繞支撐足做倒立擺運動(支撐足與地面是純滾動),而擺動腿則繞髖關節做單擺運動.此過程為連續運動階段.該過程中只有重力做功,故其總的機械能是守恒的.
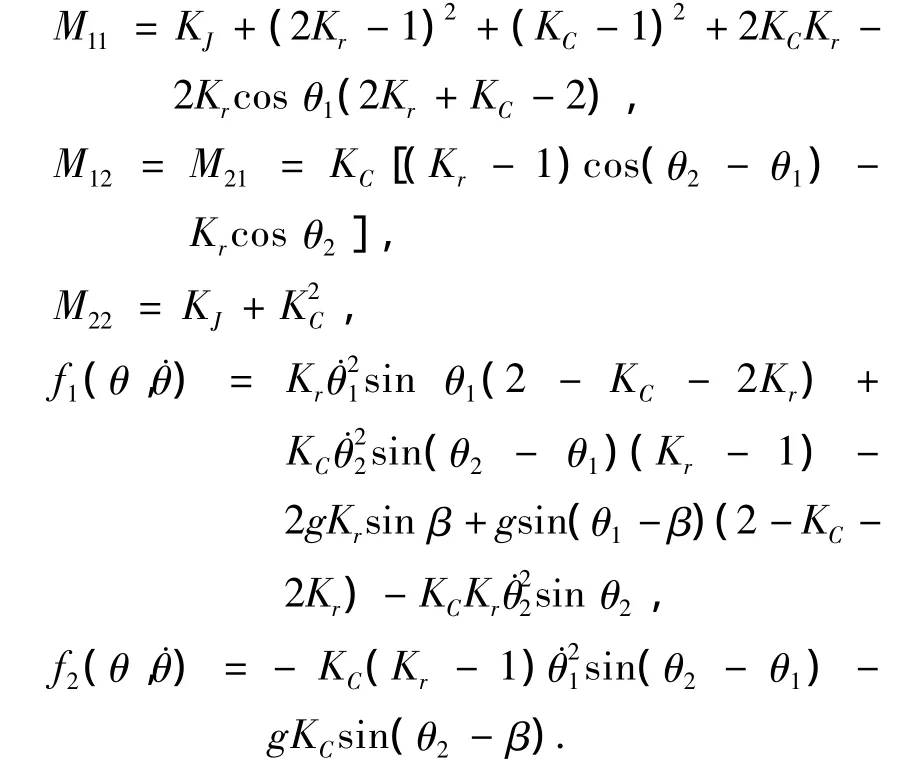
為使所建立的動力學方程適用性更廣,將方程無量綱化,令KJ=J/ml2,Kr=r/l,KC=c/l,且將時間無量綱化為由拉格朗日方程推導該階段的動力學方程,可得

其中:
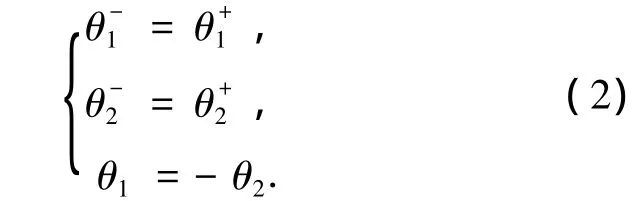
2)當擺動腿與地面碰撞后,擺動腿和支撐腿角色互換,假設碰撞是瞬時的,完全非彈性(擺動足與地面無滑動),故在碰撞前后,兩腿角速度發生突變,而兩腿角度不變,系統滿足角動量守恒.描述碰撞過程:設碰撞瞬間前后分別用上角標“-”和“+”表示,系統角動量用L表示.
對于碰撞點B和髖關節H角動量守恒:

由前述分析知:
該無膝被動模型的擺動方程和碰撞方程構成了一個完整步態周期的動力學模型,是后續的仿真和穩定性分析的基礎.
2 穩定不動點的求解
如圖1所示,被動機器人的運動過程可由狀態變量φ(t)=(θ1,θ2,˙θ1,˙θ2)來描述,每個狀態變量對應空間中的一個點,由這些點構成的空間稱為“相空間”.令機器人雙足著地的狀態是某步的起始狀態或終點狀態,通過研究雙足著地的狀態,可判斷機器人運動的周期穩定性.雙足同時著地時由圖1知θ1=-θ2,故其狀態可由狀態變量φ(t)=(θ1,˙θ1,˙θ2)來表示.
設不動點為被動機器人穩定周期運動時,腿1剛與地面相碰后,轉為支撐腿的瞬間(此時雙腿同時著地)所對應的狀態在相空間中的點用φfP(t)=(θ1,˙θ1,˙θ2)表示.不動點的存在是被動機器人能穩定行走的必要條件.由于為非線性系統,機器人每走一步即為一次龐加萊映射S(S是包括碰撞在內的一次完整的動態步行的表達式,它反映相鄰兩步之間的關系),即φn+1=S(φn),顯然對于穩定的周期運動有φfP=S(φfP).當所給的初始條件非常接近于不動點時,則模型可收斂到穩定的運動.影響不動點存在的因素為該被動模型的機械結構參數和斜面的坡度.
首先考慮如何求被動模型穩定不動點,所有的初始條件可以寫為不動點和偏差的和:

對于偏離不動點的小的偏差Δφn,可用線性化的方法來估計相空間:

方程簡化為Δφn+1=JΔφn,J為雅克比矩陣,其特征值的模是進行局部穩定性分析的關鍵.如果其模小于1,則說明結果將收斂于穩定不動點.當所給的初值接近于不動點的一定范圍內,通過牛頓-拉普森迭代函數可快速求得不動點.過程如下:

重復直到|Δφ|<ε.
3 局部穩定性分析
對模型局部穩定性的分析就是對模型不動點的存在與否,機器人在所給的初始條件下收斂到不動點的快慢程度以及各參數對不動點狀態分量變化的影響進行分析.機器人運動的不動點是否存在與所給初始條件無關,只和該模型的機械參數和斜面的坡度有關.現舉例分析,如表1.

表1 每條腿的參數
在此基礎上逐一分析各參數對機器人局部穩定性的影響:方法是在保證其他參數不變的情況下,只改變某一個參數的值,判斷雅克比矩陣的特征值的模的變化,若模大于或等于1,則模型無穩定的不動點;若模小于1則有穩定的不動點,模越小則收斂到不動點的速度就越快(即模型在所給初始條件下收斂到穩定運動狀態的速度就越快).
如圖2為模型在Matlab仿真下的運動動畫,所有分析都是基于模型可以行走的條件下進行,這樣獲得的結果更為可靠,對被動機器人的設計具有很好的指導意義.

圖2 仿真模型運動動畫
從圖3(a)中可看出當腿質量過小時(約小于0.3 kg),會出現特征值的模大于1,被動模型會出現無穩定的不動點,即不具有穩定周期運動的必要條件;此后在m∈[0.3 kg,30 kg]之間時,特征值的模小于1,說明該模型具有穩定的不動點,但隨著腿質量的增大,特征值的模也隨之增大,這意味著被動模型收斂到穩定周期運動狀態的速度逐漸變慢,同時可看出m∈[0.3 kg,5 kg]之間時特征值的模對質量的變化非常敏感(這為設計機器人提供依據:盡量取較小質量的腿,以便于通過微調腿的質量來改善機器人的局部穩定性);由特征值的模隨質量增加而增大的趨勢可看出,當質量過大時會出現特征值的模大于1,即穩定不動點會消失.
圖3(b)中可看出:穩定不動點在相空間的位置隨著腿質量的增大,沿曲線按箭頭所指方向運動.
圖3(c)為不動點的狀態隨質量的變化曲線.隨著腿質量的增加,θ1單調減小,而˙θ1,˙θ2的絕對值呈單調增加趨勢,在m∈[0.3 kg,5 kg]時,這種變化比較明顯.可見,當被動機器人具有穩定不動點時,腿質量對其模型最終的穩定運動狀態也有很大影響.
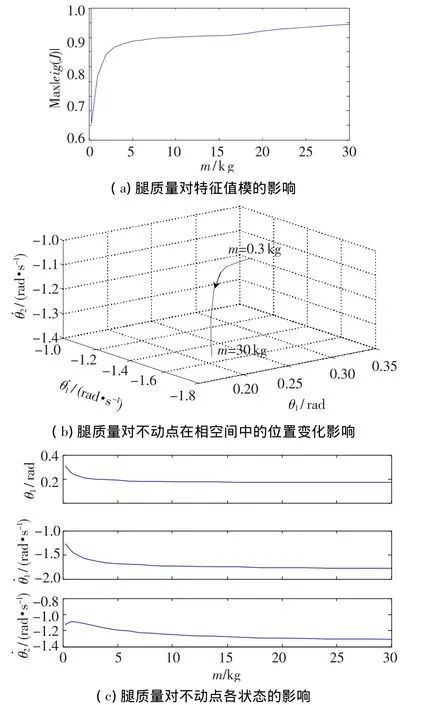
圖3 腿質量對局部穩定性的影響
從圖4(a)中可看出,當Kc過小(約小于0.03)即質心位置過高時,特征值的模大于1,機器人不具有穩定狀態;當Kc∈[0.030 4,0.624 0]時,特征值的模小于1,機器人有穩定的不動點,但隨著Kc的增大,特征值的模也在增大,被動機器人收斂到穩定運動狀態的速度越慢,且在Kc∈[0.030 4,0.200 0]和Kc>0.600 0時特征值的模對質心位置的變化非常敏感(這為設計機器人提供依據:盡量取Kc∈[0.030 4,0.200 0]腿,既有較快的收斂速度也便于通過微調腿的質心位置來改善機器人的局部穩定性);當Kc>0.624 0后機器人不具有穩定的運動狀態;可見質心位置過低(Kc<0.03)和過高(Kc>0.6240)都不利于被動機器人的穩定運動.
圖4(b)中可看出:穩定不動點在相空間位置隨Kc的增大,沿曲線按箭頭所指方向移動.
圖4(c)為不動點的狀態隨質心位置的變化曲線.隨著Kc的增加,θ1單調減小,而 ˙θ1,˙θ2的絕對值呈單調增加趨勢,可見當被動機器人具有穩定不動點時,質心位置對其最終的穩定運動狀態也有很大影響.
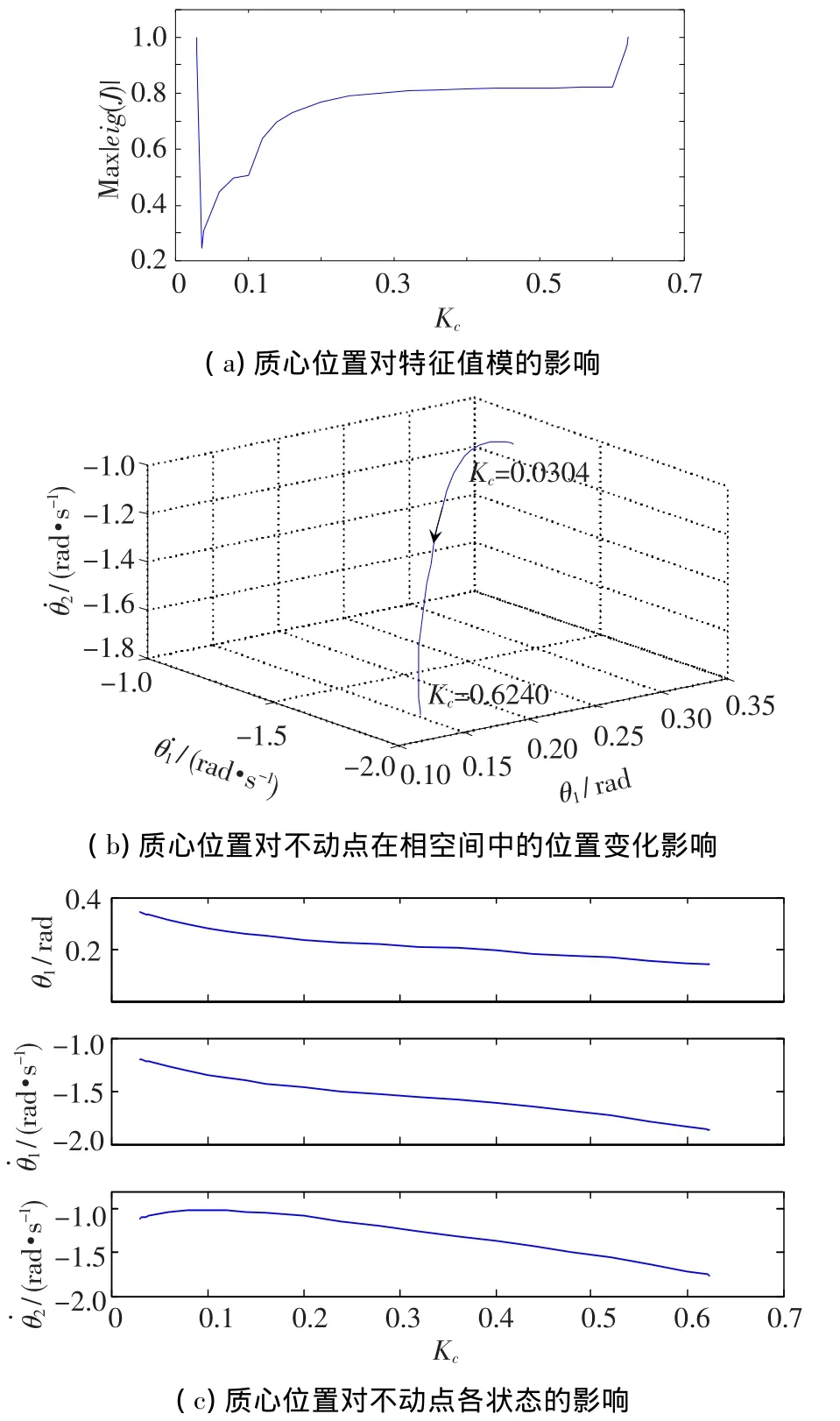
圖4 質心位置對局部穩定性的影響
從圖5(a)可看出,雅克比特征值的模并不隨足半徑的增大而單調變化,但當Kr<0.84時,特征值的模都小于1,即模型存在穩定的不動點;當Kr∈[0,0.16]之間時特征值的模單調減小;當Kr∈[0.16,0.84]之間時特征值的模單調增大,即模型收斂到穩定狀態的速度減慢.當足半徑在Kr=0.16附近時,特征值變化敏感(這為設計機器人提供依據:盡量取Kr=0.16附近的足半徑,既有較快的收斂速度也便于通過微調足半徑來改善機器人的局部穩定性).
圖5(b)中可看出穩定不動點在相空間位置,隨著Kr的增大,沿曲線按箭頭所指方向移動.
圖5(c)為不動點的狀態隨質心位置的變化曲線.隨著Kr的增加,θ1呈增大趨勢,˙θ1,˙θ2的絕對值也呈增大趨勢,可見當被動機器人具有穩定不動點時,足半徑對其最終的穩定運動狀態也有很大影響.
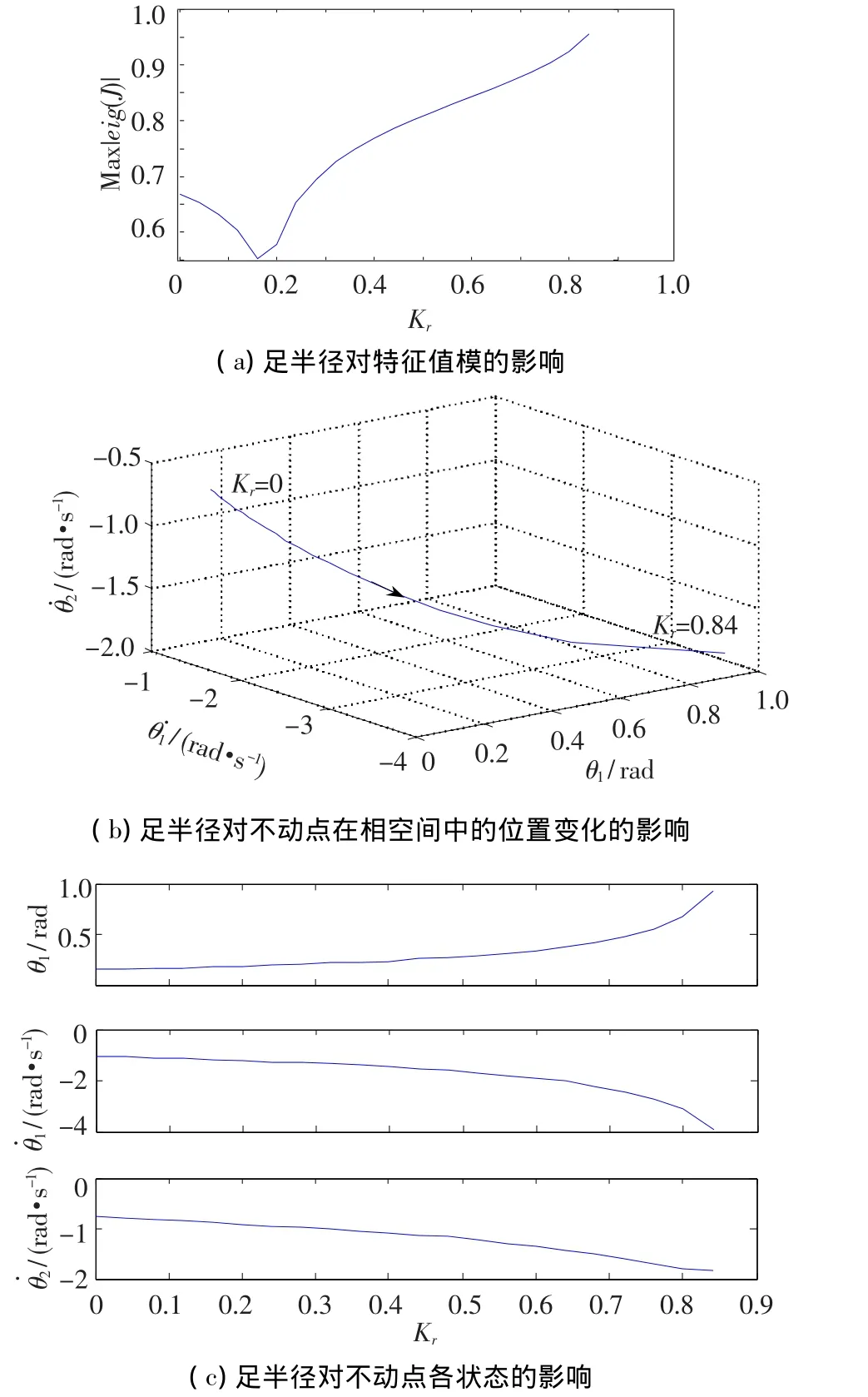
圖5 足半徑對局部穩定性的影響
從圖6(a)中可看出,特征值的模并不隨轉動慣量的增大而單調變化,當KJ∈[0,0.154]時,特征值的模小于1,被動模型具有穩定的不動點,特征值的模在KJ=0.128時,特征值的模具有最小值,即模型具有最快的收斂速度(這為設計機器人提供依據:盡量取KJ=0.128附近的轉動慣量,既有較快的收斂速度也便于通過微調轉動慣量來改善機器人的局部穩定性);當KJ>0.154時,特征值的模大于1,可見此時系統不具有穩定行走的必要條件.
圖6(b)可看出:不動點在相空間位置隨著KJ的增大,沿曲線按箭頭所指方向移動.
圖6(c)為不動點的狀態隨腿的轉動慣量的變化曲線.隨著轉動慣量的增加,θ1,˙θ1,˙θ2都呈單調變化趨勢:θ1增大,而˙θ1,˙θ2的絕對值減小.可見當被動機器人具有穩定不動點時,轉動慣量對其最終的穩定運動狀態也有很大影響.
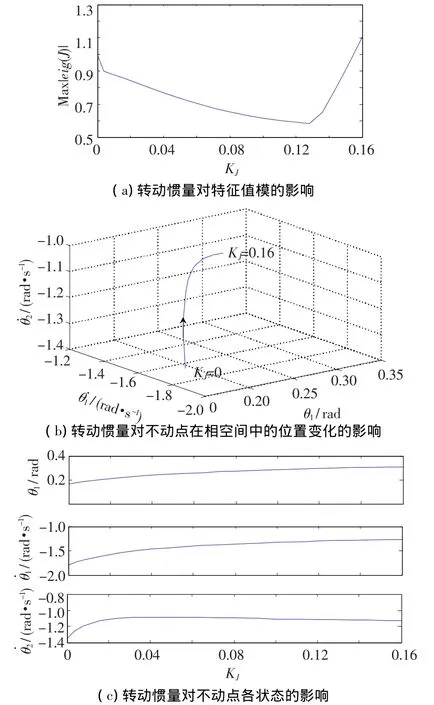
圖6 轉動慣量對局部穩定性的影響
從圖7(a)中可看出,特征值的模并不隨坡度的增大而單調變化,而是先減小(β∈[0,0.021 rad]),后增大(β∈[0.021 rad,0.038 rad]),再減小(β∈[0.038 rad,0.1 rad]),最后再增大(β>0.1 rad).
圖7(b)可看出:不動點在相空間位置隨著β的增大,沿曲線按箭頭所指方向移動.
圖7(c)為不動點的狀態隨坡度變化的曲線.隨著坡度的增加,θ1增大,而˙θ1的絕對值減小,˙θ2的方向由負變為正.可見當被動機器人具有穩定不動點時,坡度對其最終的穩定運動狀態也有很大影響.

圖7 斜面坡度對局部穩定性的影響
4 結論
1)給出了如何求被動機器人穩定不動點的方法,同時詳細分析了模型的各機械參數和斜面坡度對機器人局部穩定性的影響.
2)較小的腿質量(m∈[0.3 kg,30 kg],考慮到收斂的快速性和被動機器人的剛度和強度,可取 m=1 kg),較高的質心位置 (Kc∈[0.0304 0,0.624 0],同時考慮到被動機器人穩定行走魯棒性,取 Kc=0.2),合適的足半徑(Kr=0.16),較大的轉動慣量(KJ=0.128)以及合適的斜面坡度(β∈[0.02 rad,0.10 rad],同時考慮到被動機器人穩定行走魯棒性可取β= 0.02 rad)有利于提高被動機器人的局部穩定性.
3)被動機器人的局部穩定性分析和后續全局穩定性分析將為被動機器人本體樣機的設計提供指導和理論依據.
[1]HUANG Q,YOKOI K,KAJITA S,et al.Planning walking pattems for a biped robot[J].IEEE Transactions on Robotics and Automation,2001,17(3):280-289.
[2]MCGEER T.Passive dynamic walking[J].International Journal of Robotics Research,1990,9(2):62-82.
[3]MCGEER T.Passive dynamic biped catalogue[C]//In Chatila R and Hirzinger,editors,Proc,Experiment Robotics II:The 2nd International Symposium.Berlin: Springer-Verlag,1992:465-490.
[4]GARCIA M,CHATTERJEE A,RUINA A,et al.The Simplest Walking Model:Stability,Compiexity,and Scaling[J].ASME Journal of Biomechanic Engineering,1998,120(2):281-288.
[5]COLLINS S H,WISSE M,RUINA A.A 3-d passive dynamic walking robot with two legs and knees[J].International Journal of Robotics Research,2001,20 (7):607-615.
[6]GRIZZLE J W,GABRIEL A,PLESTAN F.Asymptotically Stable Walking for Biped Robots:Analysis via Systems with Impulse Effects[J].IEEE Transactions on Automatic Control(S0018-9286),2001,46(1):51-64.
[7]CHEVALLEREAU C,ABBA G,AOUSTIN Y,et al.RABBIT:A Test bed for Advanced Control Theory[J].IEEE Control Systems Magazine CSM-02-038 Revision(S0272-1708),2003,08(6):57-79.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19