空間飛網捕獲機器人交會軌跡規劃研究
2010-03-14 06:38:22翟光,梁斌,李成
哈爾濱工業大學學報 2010年9期
關鍵詞:規劃
翟 光,梁 斌,李 成
(1.哈爾濱工業大學控制科學與工程系,哈爾濱150001,gzhai@robotsat.com;2.北京理工大學飛行器設計,北京100081)
與一般的交會對接任務不同,由于飛網捕獲裝置彈射迅速,有效捕獲距離遠,近距離接近軌跡末端不需要進行相對停靠和位置保持,因此只要接近軌跡飛掠過目標,且軌跡中存在滿足小于捕獲距離的點,同時能夠避免進入禁飛區域內即可.正是基于這種相對運動中捕獲目標的思想,本文提出一種基于多脈沖機動的飛掠型安全軌跡方案,使空間飛網捕獲機器人在近距離接近過程中逐漸進入有效捕獲范圍并在相對運動過程中捕獲目標,考慮安全接近軌跡的基本約束條件,飛掠型多脈沖安全軌跡設計方案如圖2所示.
空間飛網捕獲機器人系統是一種基于飛網的新型在軌目標捕獲系統,可廣泛地應用于空間碎片清理、失效航天器輔助變軌等領域[1-2].空間飛網捕獲機器人在接近待捕獲目標的交會過程中,如何規劃設計接近軌跡并保證系統自身安全,是交會軌跡規劃中重點解決的問題.對于交會軌跡規劃問題,Pressing J.E[3-4]和Jezewski D.J[5-6]研究了一般交會條件下的交會軌跡規劃方法,文獻[7-10]研究了多目標約束條件下交會軌跡規劃問題.本文將采用線性規劃的方法,以燃料消耗最少和防碰撞安全條件作為規劃約束設計一種多脈沖被動安全接近軌跡,一方面使規劃得到的標稱軌跡能夠避免與目標發生碰撞,另一方面當軌控發動機失效或者測量設備發生故障時,從標稱軌跡上任意點開始的自由漂移軌跡能夠使空間飛網捕獲機器人漂離目標并自主退出任務,并且其自由漂移軌跡同樣是安全的,本文最后將對軌跡規劃結果進行仿真,驗證標稱軌跡和自由漂移軌跡的安全特性.
1 航天器相對動力學模型
如圖1所示,首先建立目標航天器的軌道坐標系,坐標系原點位于目標航天器的質心,XT軸指向航天器飛行方向,ZT軸指向地心與航天器質心連線方向,YT軸與其他兩軸構成右手坐標系垂直于軌道平面方向.rt和rc分別表示由目標航天器和追蹤航天器質心指向地心的矢量,ρ表示由追蹤航天器質心指向目標航天器質心的矢量.目前航天器相對動力學模型應用較為廣泛的為CW方程,它是一種航天器相對運動的線性化方程表示形式.由于這個方程與G.W.Hill在1878年研究月球相對地球運動時得到的方程類似,因此也有很多人將此方程稱為Hill方程.根據開普勒方程,追蹤航天器和目標航天器分別運行在近圓軌道上,忽略空間環境當中的各種攝動作用,并假定地球引力場為中心引力場,則追蹤航天器和目標航天器的軌道運動方程分別為
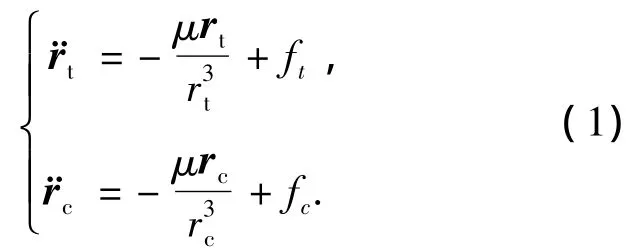
圖1 航天器相對運動示意圖
式中,rt表示目標航天器的位置矢量,rc表示追蹤航天器位置矢量,μ為地球引力常數,ft和fc分別為目標航天器與追蹤航天器的控制力.在目標航天器軌道坐標系中根據矢量對時間求導法則有

式中右側第一項為追蹤航天器在動坐標系當中的相對徑向加速度,第二項為動坐標系轉動相關的向心加速度,第三項為動坐標系轉動角速度變化相關的加速度,第四項為哥式加速度.由式(1)有
在目標星軌道坐標系下有 ρ=[x,y,z]T,rt=[0,0,rt]T,ω =[0,-ω,0]T,當兩航天器相對距離遠小于目標航天器軌道半徑時,兩者之比的二階項可以略去,將式中括號內的冪函數進行泰勒展開,只保留一階小量,式(2)可以簡化為

設a=[ax,ay,az]T為各項加速度分量,聯合式(2)和式(3)有
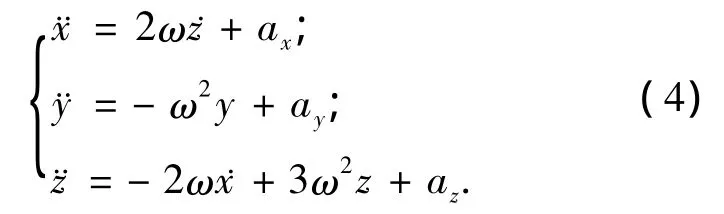
式(4)便是C-W方程的線性模型,簡稱Hill方程.工程應用證明在兩航天器相對距離小于50 km的情況下,該線性化模型具有足夠的精度.本文的軌跡規劃將基于上述動力學模型進行.
2 被動安全軌跡規劃
近距接近軌跡的安全是指在發動機和目標測量故障的情況下,空間機器人在接近過程中不會與目標飛行器發生碰撞.安全軌跡設計的關鍵是定義安全區域,即在目標飛行器外圍定義一個禁止進入的區域.安全區域的定義可以根據誤差因素、目標飛行器尺寸、安全系數等因素確定.安全軌跡即指不進入安全區域的接近軌跡,安全軌跡規劃就是通過給定機動起始時刻兩航天器的相對狀態、接近過程的時間約束、機動脈沖次數等參數,確定接近軌跡的機動策略.
目前安全軌跡設計模式一般分為兩種,包括主動安全模式和被動安全模式.如果追蹤航天器在接近過程中需要執行碰撞機動操作則為主動安全模式;如果追蹤航天器的無控條件下自由漂移軌跡不進入安全區域則為被動安全模式.相對而言被動安全模式能夠最大限度的保證軌跡的安全特性,同時也能夠減少控制操作,因此本節將采用被動安全模式來設計多脈沖接近軌跡.
2.1 安全軌跡的基本約束
空間飛網捕獲機器人安全接近軌跡設計要綜合考慮接近軌跡起始點相對狀態、目標跟蹤測量、飛網彈射捕獲位置等因素.接近軌跡的起始點相對狀態是指實施近距接近機動初始時刻的相對位置和相對速度,考慮到機器人系統在實施近距接近機動之前需經歷相對停靠狀態以對目標實施跟蹤伴飛,結合軌道相對動力學的特點,選取v-bar作為跟蹤方向最為合理;在近距離接近過程當中,空間飛網捕獲機器人的相對測量設備應保持對目標連續跟蹤測量,為保證可見光相機和激光測距儀能夠正常工作,就應該避免地影出現在測量設備的視場之內,使目標測量設備視場背景保持“干凈”;此外根據后繼章節的分析,受重力梯度力矩的影響,空間機器人在完成目標捕獲后成為一空間繩系系統,其姿態只有在r-bar方向才能保持穩定,且由軌道動力學擾動造成的捕獲偏差最小,因此飛網彈射捕獲點應盡量設計在r-bar方向.假設接近軌跡的起始點相對狀態為[x0,y0,z0,˙x0,˙y0,˙z0]T,軌跡終點的相對狀態為[xT,yT,zT,˙xT,˙yT,˙zT]T,接近過程中的任意點狀態為[xt,yt,zt,˙xt,˙yt,˙zt]T,則安全接近軌跡的基本約束可以表示為
2.2 多脈沖飛掠型安全軌跡的設計
與一般的交會對接任務不同,由于飛網捕獲裝置彈射迅速,有效捕獲距離遠,近距離接近軌跡末端不需要進行相對停靠和位置保持,因此只要接近軌跡飛掠過目標,且軌跡中存在滿足小于捕獲距離的點,同時能夠避免進入禁飛區域內即可.正是基于這種相對運動中捕獲目標的思想,本文提出一種基于多脈沖機動的飛掠型安全軌跡方案,使空間飛網捕獲機器人在近距離接近過程中逐漸進入有效捕獲范圍并在相對運動過程中捕獲目標,考慮安全接近軌跡的基本約束條件,飛掠型多脈沖安全軌跡設計方案如圖2所示.
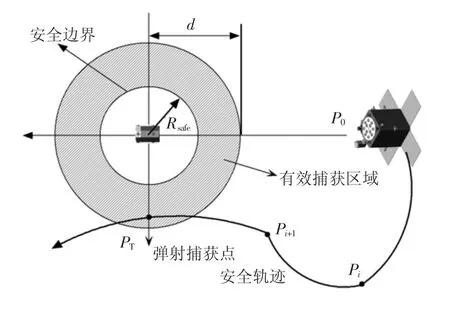
圖2 飛掠型多脈沖安全接近軌跡
圖2中P0為安全軌跡的起始位置,PT為飛網彈射捕獲位置,Pi和Pi+1表示相鄰的兩個機動脈沖施加位置,d為最大有效捕獲距離,Rsafe為圓形安全區域邊界的半徑,空間機器人在經過多個脈沖機動后由P0點到達PT點,適當的選擇PT點在r-bar方向的位置,可以達到調整安全軌跡有效捕獲段的時間長度的目的.
為同時滿足目標捕獲約束和軌跡安全約束,飛掠型多脈沖安全接近軌跡首先須保證通過脈沖機動,接近軌跡能夠進入有效的捕獲范圍;其次接近軌跡任意點能夠避免進入禁飛區域;最后接近軌跡必須能夠保證在任意機動脈沖施加之后,空間飛網捕獲機器人長時間自由漂移軌跡不進入禁飛區域;此外在近距接近時間約束和脈沖個數確定的條件下,軌跡規劃的結果應盡量減少機動過程中的燃料消耗.
安全軌跡規劃是一項較為復雜的工作,在進行安全軌跡設計之前,必須首先明確安全軌跡規劃約束條件的數學描述形式,建立安全軌跡規劃的數學模型并求解.本文接下來將采用線性規劃的方法,首先以速度增量最優為目標函數,然后建立飛掠型多脈沖安全接近軌跡的線性規劃數學模型,最后通過數學仿真驗證安全軌跡設計的合理性.
2.3 多脈沖速度增量最優機動
由于本文考慮的捕獲過程定義在軌道平面內,且平面外運動與平面內運動解耦,因此可忽略y項運動.忽略各種外力擾動,由式(4)可得面內相對運動具有以下形式:

其中狀態轉移矩陣各部分與整體轉移狀態矩陣各部分相對應,整體轉移矩陣可以表示為
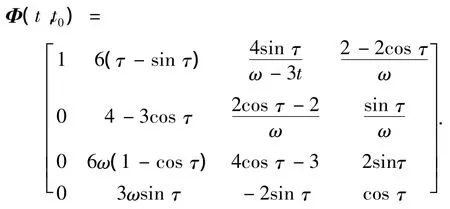
X0=[x0,z0,˙x0,˙z0]T為系統的初始狀態,τ=ω(t-t0).從近距接近機動開始點P0到飛網彈射捕獲點 PT,系統的狀態將由[x0,z0,˙x0,˙z0]T變為[xe,ze,˙xe,˙ze]T.采用N脈沖機動方式,假定由P0至Pe耗時T,則有

式中:ti為第i個脈沖施加時刻的時間,δVi=[0,0,δ˙xi,δ˙zi]T為施加的第i個速度脈沖.為便于給出安全捕獲軌跡規劃的約束條件,將式寫成分量的形式有
式中:X0(T)、Z0(T)、˙X0(T)、˙Z0(T)可由下式求得

上式便是系統的N脈沖相對運動方程,從式中可以看到系統的狀態變化和系統的初始狀態及所施加的速度脈沖增量有關,所施加的速度脈沖和各個狀態分量的運動形式呈線性關系.
在近距接近過程中,空間機器人目標測量設備的視線軸方向應該連續指向目標航天器,系統本體坐標系與軌道坐標系將呈一定的夾角,因此在軌道坐標系內的x和z向速度脈沖增量可通過六自由度軌控發動機脈沖合成得到.設速度脈沖增量的合成形式如圖3所示,即總速度脈沖增量可以分解為4個脈沖速度分量,并且4個脈沖速度分量均非負.此時為了求最小速度脈沖增量安全軌跡,則首先定義安全軌跡規劃的速度脈沖增量優化目標函數,即

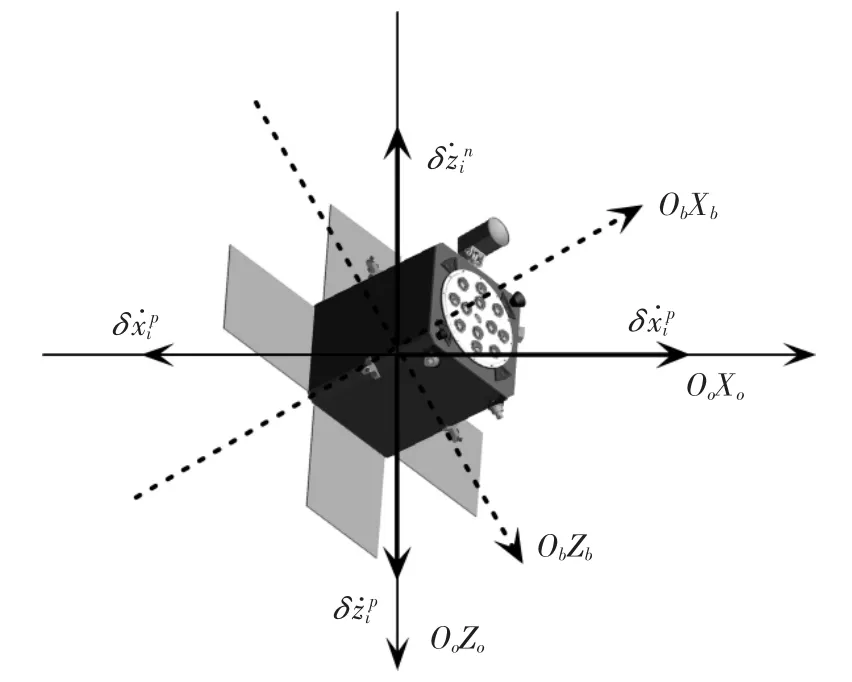
圖3 速度脈沖分解圖
2.4 飛掠型軌跡的安全約束條件
設系統的初始位置為P0點,彈射捕獲點為PT點,系統在經過N次脈沖機動后在T時刻到達彈射捕獲點.下面分段考慮交會軌跡的安全約束條件.首先考慮從第2個脈沖至第N個脈沖段,顯然只要在執行任意脈沖后其短期和長期漂移軌跡位于‖z(t)‖≥Rsafe平面區域內即可保證整個軌跡的安全性,本文的長期漂移考察時長定義為一個軌道周期.進一步根據式(5)考察z向相對運動的特性,由于z向相對運動不含長期發散項,因此根據z向相對運動的周期性,其長期漂移安全約束可以轉化為一個軌道周期內的安全約束,具體的做法可在執行脈沖機動后一個軌道周期內選擇足夠大的M個等間隔時間點,使任意時刻有‖z(t)‖≥Rsafe,顯然M越大軌跡的安全性保障就越充分.若捕獲點PT位于z>0平面內,則有
其中:n=1,2,…,N;j=1,2,…,M×(N-1).
在施加第N個脈沖后安全軌跡需在T時刻經過PT點,設PT點的位置矢量為[x(T),z(T)]T,則彈射捕獲點對軌跡的約束條件可表示為
進一步考慮第一個脈沖和第二個脈沖之間的軌跡段約束條件.為了保證交會軌跡滿足式(6)的約束,第一個脈沖施加后指定時刻T1必須使系統進入到z(t)≥Rsafe平面區域,且其長期漂移軌跡滿足安全性要求.為避免長期發散項使問題復雜化,可根據式(5)使第一個脈沖施加后系統相對運動軌跡為一封閉橢圓,此時δ˙x1=0,δ˙z1≠0,則約束條件可寫為
稱上式為第一脈沖約束.由于施加第一個脈沖后系統的相對運動軌跡為一封閉橢圓,根據橢圓軌跡的特性,其在x向最大的位移可由橢圓的長半軸確定,當橢圓的長半軸與安全軌跡邊界無交點時,第一個脈沖的長期漂移軌跡為安全軌跡,因此第一脈沖約束可分為以下兩種約束條件:
2.5 安全軌跡線形規劃標準型
通過上述推導可以看出,所有含速度脈沖的約束條件都是線性等式或者不等式,因此安全軌跡規劃問題可以轉換為線性規劃問題求最優解,線性規劃算法求解快速,非常適合于航天器在軌實時自主規劃.經整理,捕獲任務中的軌跡規劃問題可表示為如下形式:

其余為不等式約束,通過不等式變換可以記為

因此上述線性規劃當中共有M×(N-1)+5個約束條件,線性規劃中的最優解求取關鍵在于首先找到初始基本可行解,然后通過進一步迭代尋優.
3 安全軌跡規劃算例仿真
假定初始時刻目標航天器和飛網空間機器人同運行于軌道高度為593.5 km的圓軌道上,初始時刻兩航天器在目標軌道坐標系中處于停靠狀態.取Rsafe=50 m,d=100 m,彈射捕獲點位置為[0 m,70 m],由起始位置到達目標點的規劃時間分別定為T=3 600 s和T=4 200 s,取中間點數M=36;脈沖施加時刻為規劃時間的等分點.分別取施加脈沖次數為3,4,5三種情況進行仿真,仿真結果表明在施加脈沖次數為3時無規劃結果,施加脈沖次數為5時脈沖速度增量明顯變大,而取施加脈沖次數為4時仿真結果較為合理.取相對初始狀態為[-1 000 m,0 m,0 m/s,0 m/s],圖4,5是在規劃時間T=3 600 s和T=4 200 s,第一脈沖約束條件取不同值時4脈沖安全軌跡規劃的結果,圖中兩個虛線大圓和小圓分別表示有效捕獲范圍邊界和安全區域邊界,星號表示脈沖施加的位置.
在規劃時間取不同值和第一脈沖約束取不同條件的情況下,接近過程當中各次施加的脈沖大小也不同,在整個接近過程當中,相對運動速度的變化情況如圖6,7所示.
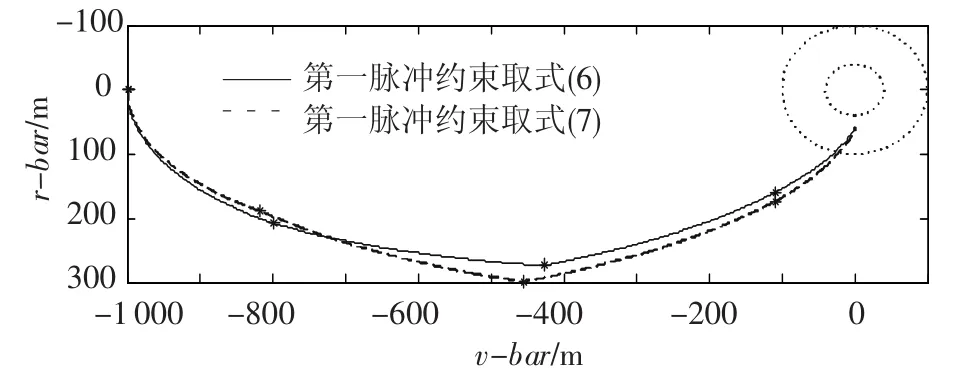
圖4 T=3 600 s時的安全接近軌跡
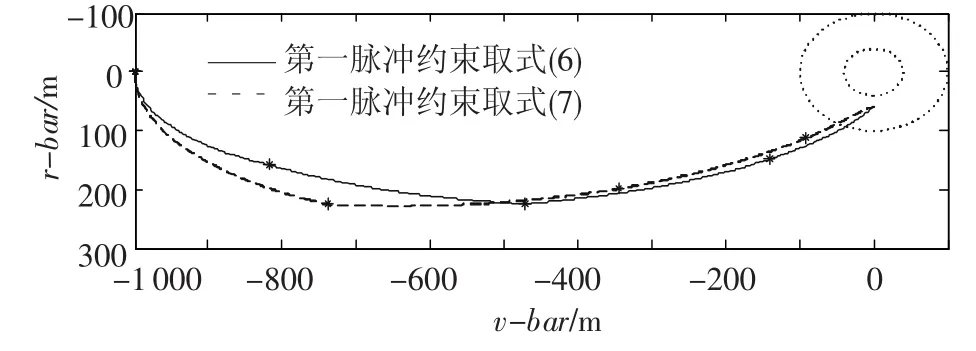
圖5 T=4 200 s時的安全接近軌跡

圖6 T=3 600 s時x向和z向相對運動速度
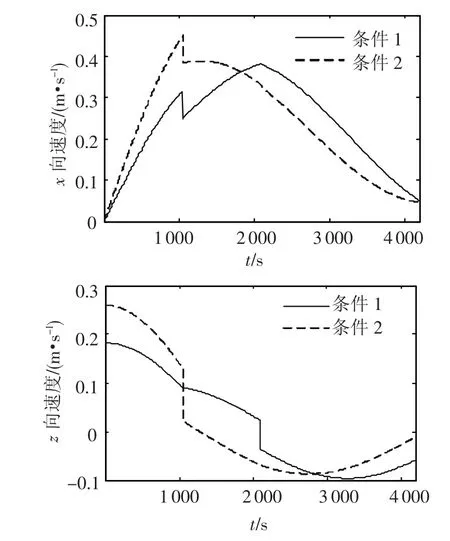
圖7 T=4 200 s時x向和z向相對運動速度
為了對比在不同條件進行路徑規劃得到各次速度增量,分別取初始相對狀態[-1 000 m,0 m,0 m/s,0 m/s]和[-2 000 m,0 m,0 m/s,0 m/s]兩種情況,在不同規劃約束條件下進行4脈沖規劃并得到各次速度增量的大小,各次脈沖取代數和,其大小分別對應表1,2.
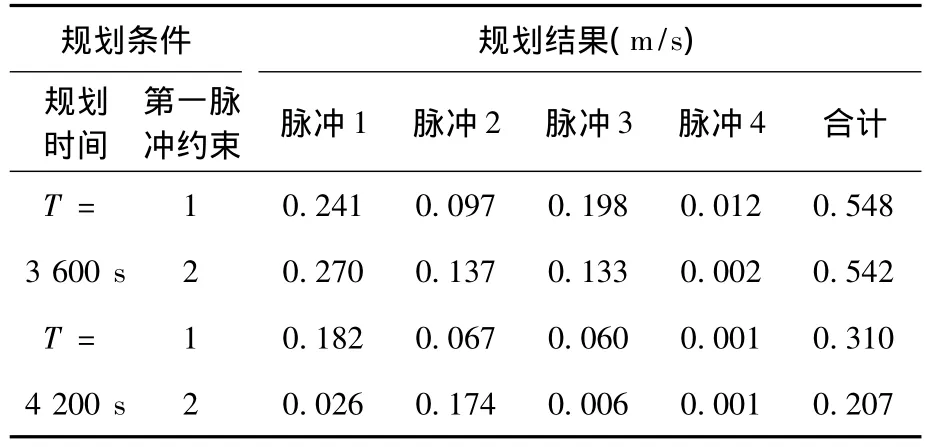
表1 初始距離1 km安全軌跡規劃結果
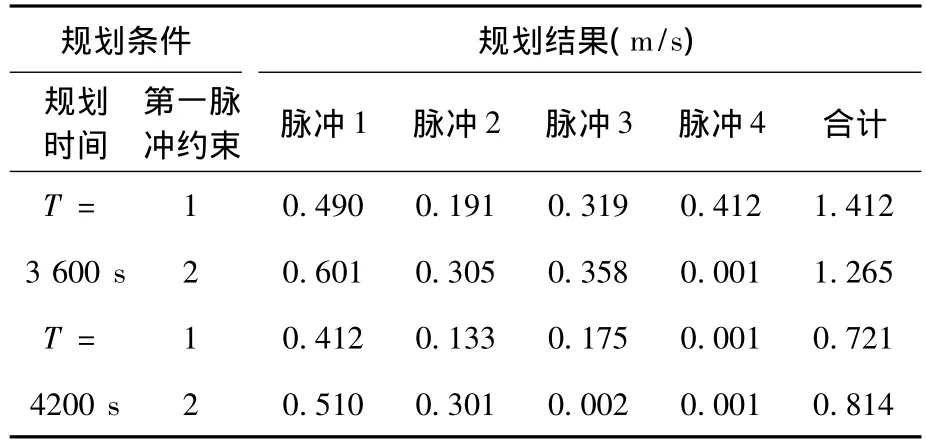
表2 初始距離2 km安全軌跡規劃結果
從表1,2的各次脈沖統計可以看出,在相同距離相同規劃時間的約束條件下,第一脈沖約束取條件1的總速度增量要大于取條件2的情況;在第一脈沖約束條件相同時,規劃時間T=3 600 s的總速度增量要大于T=4 200 s時的速度增量;而當初始相對距離增大時,總速度增量也隨之增大.為進一步考察發動機故障情況接近軌跡的被動安全特性,以初始相對狀態為[-1 000 m,0 m,0 m/s,0 m/s]為例,取規劃時間T=3 600 s和 T= 4 200 s,第一脈沖約束取條件1,發動機在不同脈沖施加時刻失效后一個軌道周期的自由漂移軌跡.
為了進一步說明軌跡的被動安全特性,以T=3 600 s的安全軌跡規劃為例,分別檢驗各脈沖施加后系統的自由漂移軌跡的安全特性,圖中虛線給出了脈沖施加后一個軌道周期內的系統自由漂浮軌跡.圖8,9為發動機在不同的脈沖施加處失效后系統的自由漂移軌跡,其中在第二個脈沖施加處發動機失效后的自由漂移軌跡為一周期性橢圓,T=3 600 s的情況下自由漂移軌跡離安全邊界最近距離大約為272 m,T=4 200 s的情況下自由漂移軌跡與安全邊界相切;第三和第四脈沖施加處發動機失效后自由漂移軌跡逐漸接近安全邊界并最終漂離目標,顯然上述規劃得到的接近軌跡具有較好的被動安全特性.
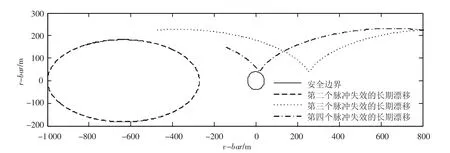
圖8 T=3 600 s時四脈沖自由飄移軌跡
4 結論
本文首先推導了航天器相對運動的線性化模型,在考慮空間飛網捕獲機器人自身安全和機動過程燃料消耗最優的條件下,提出了空間飛網捕獲機器人安全捕獲軌跡設計的概念和約束條件;設計了一種飛掠型近距離接近軌跡方案,推導了安全軌跡的不等式約束,以最小速度脈沖增量為目標函數,采用線性規劃的方法建立了飛掠型安全軌跡的線性規劃模型,該種設計方法在給定接近時間、脈沖機動次數、捕獲位置等約束條件之后,能夠快速給出各次機動脈沖大小,十分適合在軌捕獲軌跡的實時規劃;本文最后通過算例仿真,驗證了在不同規劃條件下軌跡規劃方法的正確性和接近軌跡的安全性.
[1]ZHAI Guang,QIU Yue,LIANG Bin,LI Cheng.On-orbit capture with flexible tether-net system[J].Acta Astronautica,2009,65:613-623.
[2]ZHAI Guang,QIU Yue,LIANG Bin,et al.System dynamics and feedforward control for tether-net space robot system[J].International Journal of Advanced Robotic Systems,2009,65(2),137-144.
[3]PRUSSING J E.Optimal four-impulsive fixed-time rendezvous in the vicinity of a circular orbit[J].Journal of Spacecraft and Rockets,2003,40(6):952-959.
[4]PRUSSING J E.Optimal impulsive linear system:sufficient conditions and maximum number of impulses[J]. The Journal of the Astronautical Sciences,1995,43 (2):195-206.
[5]JEZEWSKI D J,DONALDSON J D.An analytic approach to optimal rendezvous using Clohessy-Wiltshire equations[J].The Journal of the Astronautical Sciences,1979,27(3):293-310.
[6]JEZEWSKI D J,BRAZZELl J P.Survey of rendezvous trajectory planning[J].Advances in the Astronautical Sciences,1992,76:1373-1396.
[7]WILLIAMS P.Prolonged payload rendezvous using a tether actuator mass[J].Journal of spacecraft,2006,41:889-893.
[8]LUO Yazhong,TANG Guojin,LEI Yongjun.Optimal multi-objective linearized rendezous[J].Journal of Guidance,Control and Dynamics,2007,30(2):383-389.
[9]FEHSE W.Automated Rendezvous and Docking of Spacecraft[M].London:Cambridge University Press. 2003.
[10]YU Shaohua.On the dynamics and control of the relative motion between two spacecraft[J].Acta Astronautics,1995,35(6):403-409.
猜你喜歡
房地產導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:34
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41