基于滑模觀測器的環形倒立擺控制系統的設計與實現?
2010-02-09 01:57:44張昌凡黃宜山
測試技術學報 2010年2期
邵 瑞,張昌凡,黃宜山,戴 璐
(湖南工業大學 電氣信息工程學院 ,湖南 株洲 412008)
倒立擺系統作為典型的快速、多變量、非線性、絕對不穩定系統,一直是控制理論與應用的熱點問題,不但是驗證現代控制理論的典型實驗裝置,而且其控制方法和思路對處理一般工業過程亦有廣泛的用途.又因其與火箭飛行器及單足機器人有很大的相似之處,引起國內外學者的廣泛關注.其控制方法在軍工、航天、機器人領域和一般工業過程中都有著廣泛的用途.如機器人行走過程中的平衡控制,火箭發射中的垂直度控制和衛星飛行中的姿態控制等均涉及到倒置問題,對倒立擺系統的研究在理論和方法論上均有著深遠意義.
目前對倒立擺理論方面的研究已經比較成熟,包括系統控制器的設計、自動起擺策略的研究及魯棒性的探討.典型的控制器設計理論有:PID控制、根軌跡以及頻率響應法、狀態空間法、最優控制理論、模糊控制理論、神經網絡控制、擬人智能控制、魯棒控制方法、自適應控制等以及這些控制理論的相互組合組成更強大的算法[1-5].起擺策略主要是基于能量的控制策略等[6-8].而這些方法的研究都是以狀態變量全部可測為前提的,然而,實際系統的狀態通常是未知或僅為部分可知的.如果僅靠儀器儀表或傳感器等測量手段來獲取控制系統所需要狀態變量、系統參數等信息,不但要增大系統開支,也增加了硬件的復雜性,更何況有的信息本身就不便于或是無法通過物理測量獲取.觀測器可以根據系統模型從部分可測狀態變量著手,重構出其它不可測的狀態變量,因而采用觀測器方法,可以在降低測量系統復雜性的基礎上實現高性能控制器的設計,因此,狀態觀測器的設計是實現高精度控制的關鍵.
在此,應用拉格朗日方程方法建立了環形一級倒立擺的非線性數學模型,在應用控制理論分析的基礎上,采用狀態反饋的極點配置法為倒立擺系統建立了一種合適的控制方案,利用滑模控制有關理論設計了滑模狀態觀測器,并在實際的倒立擺系統中通過運動控制器實現了實時控制,取得了較好的控制效果.
1 系統描述
在忽略了空氣流動,各種摩擦之后,可將倒立擺系統抽象成兩個勻質桿和質量塊組成的系統,如圖1所示.其中,m1代表連桿的質量;m2代表擺桿的質量;m3代表質量塊的質量;l1代表連桿長度;l2代表擺桿轉動中心到桿質心的距離;θ1代表連桿與水平 x軸的夾角(順時針為正);θ2代表擺桿與垂直向上方向的夾角(順時針為正).
關于倒立擺運動方程的建立和分析,很多文獻都有介紹,主要有牛頓-歐拉方法和拉格朗日方法.這里采用文獻 [9]中介紹的利用拉格朗日方程推導環形倒立擺運動學方程的方法得到系統的運動方程.

式中:K 12=3g/(4l2),K15=3l1/(4l2).采用角加速度作為輸入,得到方程


圖1 環形倒立擺系統示意圖Fig.1 The sketch map of the circular inverted pendulum system
2 控制器的設計
由于倒立擺系統是一個單輸入多輸出的非線性絕對不穩定系統,采用經典控制方法的 PID和根軌跡等方法無法滿足同時控制多個輸出量的要求.故這里用 LQR的極點配置法設計控制器[10].
系統實際參數為 m1=0.234 kg,l1=0.221m,m2=0.13 kg,l2=0.197 5m,m3=0.178 kg,重力加速度取 g=9.8m/s2.代入式 (1)求 K12,K15得 K12=37.215 2,K 15=0.839 2.求出矩陣 A的特征值為0,0,6.100 4和 -6.100 4,有一個特征值大于 0,說明系統開環不穩定.由 rank([B A*B A^2*B
A^3*B])=4及 rank([C*B C*A*B C*A^2*B C*A^3*B D])=2可知系統可控可觀,故可以對系統進行控制器設計,使系統穩定,同時可以設計狀態觀測器來求取系統中沒有直接測量的速度變量.
在設計此控制器時,控制量 u=-K x,K為線性最優反饋增益矩陣.由系統可控,根據設計經驗把極點配置在 p1=-3+2 j;p2=-3-2j;p3=-10;p 4=-20.用 Achermann算法配置閉環極點[11],調用 acker()函數,求得 K值為 K=[-69.863 9 595.899 8 -42.724 5 93.809 0].
實際中連桿和擺桿的角度是通過角度編碼器采集數據實現測量,相應速度量可以通過加速度傳感器來實現測量,也可以通過采用角度量的差分來近似速度量,因為光電碼器的信號較為可靠.然而應用速度傳感器增加了硬件設備,對角度量的微分不能避免噪聲的干擾,使系統不穩定,因此考慮用滑模觀測器來實現對未知變量即速度量的觀測,這樣既簡化了系統硬件設備,又能避免系統噪聲的干擾.
3 滑模觀測器的設計
近年來,滑模變結構控制理論在解決復雜的非線性系統的綜合問題時,取得了突出的進展.國內外對滑模變結構在狀態觀測器的應用已有一定的研究基礎,相關方法相繼被提出[12-15],本文采用文獻 [14]所提滑模變結構觀測器設計方法設計倒立擺系統中的觀測器.
這里所設計的狀態觀測器,只需已知兩個狀態變量 x1,x2即可實現對其它兩個狀態變量 x3,x4的觀測,因而在所研究的實際倒立擺系統中,僅需兩個角度編碼器可完成對系統數據的采集,而不需要測量速度的速度傳感器,簡化了系統的硬件需要.

4 系統實現及實驗結果
4.1 倒立擺系統在 Matlab中的仿真


圖2 Simulink仿真結果Fig.2 The results of sim ulation
通過對倒立擺系統控制器和觀測器的仿真,驗證了所提方法的有效性.并對倒立擺系統的非線性等特性有了比較深刻的理解,為進一步的實際試驗奠定了基礎.
4.2 倒立擺實時控制
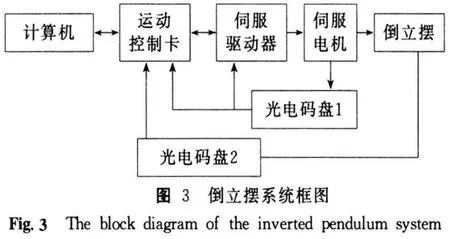
環形倒立擺系統的系統框圖如圖3所示.
系統包括計算機、運動控制卡、伺服機構、電控箱、倒立擺本體和光電碼盤幾大部分,組成了一個閉環系統.光電碼盤 1將連桿的角度、角速度信號反饋給伺服驅動器和運動控制卡,擺桿的角度、角速度信號由光電碼盤 2反饋回控制卡.計算機從運動控制卡中讀取實時數據,確定控制決策,并由運動控制卡來實現該控制決策,產生相應的控制量,驅動電機轉動,帶動連桿運動,保持擺桿的平衡.
環形倒立擺本體由基座、伺服機構、連桿、一級擺桿、二級擺桿、角度編碼器等組成.其中伺服機構采用的是具有增量式編碼器的交流松下伺服電機.控制伺服電機時,控制器輸出 + /-10 V模擬電壓控制信號.電機型號是 MSMD022P1U,功率 0.2 kW,轉速3 000 r/min.電控箱內安裝有交流伺服驅動器、I/O接口板、開關電源、開關和指示燈等電氣元件.

圖4 實際倒立擺系統組成Fig.4 The real circular inverted pendulum system
控制平臺主要組成部分:與 IBM PC,AT機兼容的 PC機、GT-400-SV PCI運動控制卡、運動控制卡用戶接口軟件.這里運動控制卡核心由 ADSP2181數字信號處理器和 FPGA組成,可以實現高性能的控制計算.GT系列運動控制器提供 C語言函數庫和W indows動態鏈接庫,實現復雜的控制功能.并具有可編程事件中斷;可設置跟隨誤差極限、加速度極限、控制輸出極限等,保證控制安全可靠及硬件捕獲原點開關和編碼器 Index信號,實現高精度機器原點位置鎖存.倒立擺實際系統組成如圖4所示.
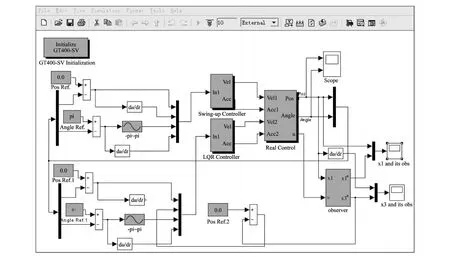
圖5 環形倒立擺系統實時控制程序圖Fig.5 The real-time control program of the circular inverted pendulum

圖6 實時控制子系統程序圖Fig.6 The Real control subsystem program
實際控制時,通過把 Matlab 7.1中 Simu link程序編譯到 RTW(Real-TimeW orkshop 6.3)實現對系統的實時控制[16].同時利用 VC++ 語言作為編譯和運行的環境.利用 Simulink建立的倒立擺系統模型主界面如圖5所示,Real Control子系統程序框圖如圖6所示,其中 Pendulum為倒立擺實際控制對象;observer為滑模觀測器子系統,程序如圖7所示.

圖7 觀測器子系統程序圖Fig.7 The observer subsystem p rog ram

圖8 系統實際控制輸出結果Fig.8 The results of real-tim e control system
編譯程序下載到運動控制卡中,采樣周期設置為 0.005 s,這里運動控制卡采用的是深圳固高科技有限公司的 GT系列的 GT-400-SV-PCI板卡,然后運行程序使系統達到穩定,利用 x PC Target for Scope獲取實驗輸出波形如圖8所示.由圖8(a),8(b)可知程序執行前 6 s是基于能量控制的自動起擺過程,6~9 s是自動起擺到穩擺控制的過渡過程.第 7 s左右是程序從自動起擺到穩擺控制的切換運行.從圖8(c)和 8(d)中可看出第 9 s時系統到達穩定狀態,連桿穩定在相對參考位置的 -0.025 rad的位置,擺桿處于動態平衡狀態,穩定到相對參考位置 3.14 rad的位置.同時狀態變量x3實現了很好的跟蹤.
由以上倒立擺系統的仿真和實際控制結果可以看出,仿真中各加速度變量的觀測值收斂到零,實現系統的穩定控制.在實際的倒立擺控制系統中,連桿和擺桿的角度能實現動態的穩定,其各自的加速度量也穩定在零點附近.其中連桿的加速度觀測值能跟蹤上實際值.
5 結 語
本文針對環形倒立擺系統的控制,分別基于最優控制理論和滑模控制理論設計系統的控制器和狀態觀測器.在保證控制器實現對系統控制的情況下,引入滑模狀態觀測器實現對未知變量的觀測,簡化了系統硬件,減少了系統對外界噪聲的影響.仿真表明了該觀測器方法的可行性,實際倒立擺控制驗證了該方法的實用性和有效性.
[1] Zhao J,Spong M W.Hybrid contro l for globa l stabilization of the cart-pendu lum system[J].Automatica,2001,37(12):1941-1951.
[2] Cho H T,Seul J.Neural netw ork position tracking contro l of an inverted pendu lum an X-Y tab le robot[J].Intelligent Robots and Systems,2003,2:1210-1215.
[3] Marzi H.Multi-Input Fuzzy control of an inverted pendulum using an armature controlled DCmotor[J].Robotica.2005,23(6):785-788.
[4] 李鐵龍.非線性滑模變結構控制及其在倒立擺系統中的應用研究[D].秦皇島:燕山大學,2005.
[5] Yang JH,Shim SY,Seo J-H,et al.Swing-up control for an inverted pendu lum with restricted cart rail length[J].Int.Journal o f Control,Automation and Systems,2009,7(4):674-680.
[6] Yoshida K.Sw ing-Up Controlofan Inverted Pendulum by Energy-Based Methods[C].Proceedings of the American Control Conference,1999:4045-4047.
[7] Astro m K J,Furuta K.Swinging up a pendulum by energy contro l[J].Automatica,2000,36(2):287-295.
[8] Muskinja N,Tovornik B.Swinging up and stabilization of real inverted pendulum[J].IEEE Trans.on Industrial Electronics,2006,53(2):631-639.
[9] 吳愛國,張小明,張釗.基于 Lagrange方程建模的單級旋轉倒立擺控制[J].中國工程科學,2005,7(10):11-15.
W u Aiguo,Zhang Xiaom ing,Zhang Zhao.A contro l system based on the lagrangemodeling method for a sing le link rotary inverted pendulum[J].Engineering Science,2005,7(10):11-15.(in Chinese)
[10] 張小明.旋轉倒立擺系統控制方法的研究[D].天津:天津大學,2005.
[11] 姚勝興,彭楚武.基于比例切換變結構控制的倒立擺系統研究[J].武漢理工大學學報,2007,29(4):114-117.
Yao Shengxing,Peng Chuw u.Research on inverse pendulum system based on proportion switching variab le structure control[J].Journalof W uHan University of Technology,2007,29(4):114-117.(in Chinese)
[12] Tan C P,Edw ards C.Sliding mode observers for detec tion and reconstruction o f sensor fau lts[J].Automatica,2002,38(5):1815-1821.
[13] Edw ards C,Spurgeon S K.On the development of discontinuous observers[J].International Journal o f Contro l,1994,59(5):1211-1229.
[14] Fabienne F P.Francoise L L.State and parameter identification for nonlinear uncertain systems using variable structure theory[C].The 4th W orkshop o f the Non linear Contro l Netw ork,2001,Berlin/Heidelberg:Springer,2003:109-128.
[15] 何靜,邱靜,張昌凡,王錫波.非線性系統的集成故障診斷和容錯控制 [J].機械工程學報,2009,45(5):70-78.
He Jing,Qiu Jing,Zhang Chang fan,Wang Xibo.Integrated fau lt diagnosis and fau lt-to lerant contro l for nonlinear system[J].Journalof Mechanical Engineering,2009,45(5):70-78.(in Chinese)
[16] Sukontanakarn V,Parnichkun M.Real-timeop timal control for rotary inverted pendulum[J].American Journa l of App lied Sciences,2009,6(6):1106-1115.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
意林原創版(2016年10期)2016-11-25 10:28:30
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
