船舶智能結(jié)構(gòu)振動反饋控制研究*
2007-06-01 12:30:31陳建峰
船海工程 2007年2期
陳建峰 余 音
上海交通大學(xué)船舶海洋與建筑工程學(xué)院 上海 200030
船舶智能結(jié)構(gòu)振動反饋控制研究*
陳建峰 余 音
上海交通大學(xué)船舶海洋與建筑工程學(xué)院 上海 200030
針對船舶結(jié)構(gòu)特點,以壓電(PZT)材料作為反饋傳感器和控制作動器,粘貼在船舶板梁結(jié)構(gòu)表面,形成智能結(jié)構(gòu)反饋控制閉環(huán)系統(tǒng),使結(jié)構(gòu)振動得到有效控制。從PZT材料的本構(gòu)方程出發(fā),建立了壓電智能結(jié)構(gòu)的傳感器、作動器以及振動控制有限元方程,并用ANSYS軟件進(jìn)行了數(shù)值仿真研究。數(shù)值算例驗證了智能結(jié)構(gòu)在結(jié)構(gòu)尺寸和厚度比較大的船舶板梁結(jié)構(gòu)振動控制的可行性,可以給船舶結(jié)構(gòu)振動控制提供一種新的途徑。
智能結(jié)構(gòu) 作動器 振動控制 ANSYS 三明治復(fù)合材料
20世紀(jì)90年代以來,以疊層材料制造技術(shù)、微電子和功能材料耦合特性的利用為基礎(chǔ)而發(fā)展起來的智能結(jié)構(gòu)越來越受到人們的重視[1]。近年在海洋結(jié)構(gòu)工程中,針對處于時變性和不確定性環(huán)境中運(yùn)行的海洋結(jié)構(gòu),也提出了機(jī)敏海洋結(jié)構(gòu)的概念,并展開了有關(guān)的研究工作[2-3],船海智能結(jié)構(gòu)的研究將對船舶與海洋結(jié)構(gòu)的健康監(jiān)測和控制有重要意義。
針對船舶結(jié)構(gòu),研究壓電智能結(jié)構(gòu)對較大尺寸和厚度的板梁結(jié)構(gòu)的振動控制,利用ANSYS軟件中的APDL參數(shù)化設(shè)計語言構(gòu)造反饋控制系統(tǒng),對兩種典型的板梁結(jié)構(gòu)進(jìn)行振動控制研究。
1 智能結(jié)構(gòu)的有限元控制方程
1.1 壓電材料本構(gòu)方程
壓電方程描述了壓電材料力學(xué)和電學(xué)行為之間的相互作用。壓電晶體在彈性極限范圍內(nèi),由于應(yīng)變和電位移均可由應(yīng)力和電場兩方面產(chǎn)生,根據(jù)彈性結(jié)構(gòu)關(guān)系式、介電關(guān)系式及壓電效應(yīng)表示式,可以得到壓電材料本構(gòu)方程[4]

式中:{σ},{S}——應(yīng)力和應(yīng)變向量;
{D}——電位移向量;
{E}——電場強(qiáng)度向量;
[ε]——介電常數(shù)矩陣;
[K]——結(jié)構(gòu)剛度矩陣;
[e]——壓電(應(yīng)力)常數(shù)矩陣。
1.2 機(jī)電耦合的結(jié)構(gòu)動力學(xué)方程
根據(jù)Halmilton原理可以推導(dǎo)出含壓電材料的智能結(jié)構(gòu)動力學(xué)方程[4]

式中:[Muu]——結(jié)構(gòu)質(zhì)量矩陣;
[Cuu]——結(jié)構(gòu)阻尼矩陣;
[Kuu]——結(jié)構(gòu)剛度矩陣;
[Kuφ]——結(jié)構(gòu)壓電剛度矩陣;
[Kφφ]——結(jié)構(gòu)介電剛度矩陣;
{u}——位移;
{φ}——電勢;
{Fu}——結(jié)構(gòu)外載荷;
{Fφ}——電極表面電荷產(chǎn)生的載荷矢量。
1.3 傳感器、作動器方程及控制方法
利用逆壓電效應(yīng)將復(fù)合材料板殼型自適應(yīng)結(jié)構(gòu)中的壓電材料鋪層作為作動器,即在壓電鋪層中作用適當(dāng)?shù)碾妷阂垣@得結(jié)構(gòu)變形。作動器方程為[5]

壓電材料的直接壓電效應(yīng)使作用在材料上的應(yīng)變轉(zhuǎn)換為電荷。利用這一性質(zhì),含有壓電材料鋪層的復(fù)合材料層板中的壓電材料鋪層可以設(shè)計為傳感器。傳感器方程為[5]

式中:{δ}——傳感器處的結(jié)構(gòu)位移。
采用比例反饋控制和恒值反饋控制兩種控制
方法。
比例反饋控制輸入電壓為

式中:{φs}——傳感器處反饋的電勢;
[
G]——反饋增益矩陣。
恒值反饋控制輸入為

式中:sign[]——符號函數(shù),

1.4 基于APDL的反饋控制有限元仿真系統(tǒng)
在有限元軟件ANSYS中建立一個虛擬的試驗系統(tǒng),并構(gòu)造一個反饋控制系統(tǒng),控制步驟如下。
1)計算第i個時間步長后的瞬態(tài)響應(yīng)。
2)輸出傳感器上的電壓作為反饋信號。
3)由傳感信號經(jīng)反饋控制器計算得到控制點處的位移Y,如果Y<Y0(Y0表示控制目標(biāo)),轉(zhuǎn)8),否則轉(zhuǎn)4)。
4)通過反饋控制器計算控制電壓Vi
式中:V0——傳感器反饋的電壓;
G——反饋矩陣。
5)把得到的控制電壓施加到作動器上。
6)計算第i+1個時間步長后的瞬態(tài)響應(yīng)。
7)i=i+1,重復(fù)步驟2)~6)。
8)結(jié)束控制。
ANSYS中的APDL參數(shù)化語言為實現(xiàn)有限元環(huán)境中的反饋控制仿真提供了一個便捷的途徑,通APDL語言中的循環(huán)結(jié)構(gòu)就能實現(xiàn)上述過程。有限元環(huán)境中的反饋控制系統(tǒng)見框圖1。
圖1 反饋控制系統(tǒng)框圖
1.5 振動控制的實現(xiàn)
傳感器把結(jié)構(gòu)的位移傳給反饋控制器,反饋控制器根據(jù)傳來的位移信息計算出控制電壓,然后施加給作動器,這樣作動器就產(chǎn)生一個反饋位移,使結(jié)構(gòu)的振動減弱。重復(fù)這一過程,結(jié)構(gòu)的振動就能得到有效的控制。
2 算例
以下算例均在ANSYS軟件中建立有限元模型進(jìn)行仿真計算。振動控制通過ANSYS中的APDL結(jié)構(gòu)參數(shù)化語言,建立的循環(huán)反饋控制系統(tǒng)實現(xiàn)。控制方法有兩種,算例2.1采用的是比例反饋控制,算例2.2采用的是恒值反饋控制。
2.1 三明治懸臂板
圖2所示是一個1 500 mm×500 mm×28 mm的三明治懸臂板。三明治板上、下表面分別貼有壓電作動器,圖中的中間白色部分為壓電材料PZT,尺寸為1 500 mm×100 mm×1 mm,三明治板上下兩層為復(fù)合材料,中間為夾心材料。復(fù)合材料面板的鋪層為(0°/45°/—45°/90°)s,鋪層示意圖見圖3,陰影的面為貼在復(fù)合材料表面的壓電鋪層。
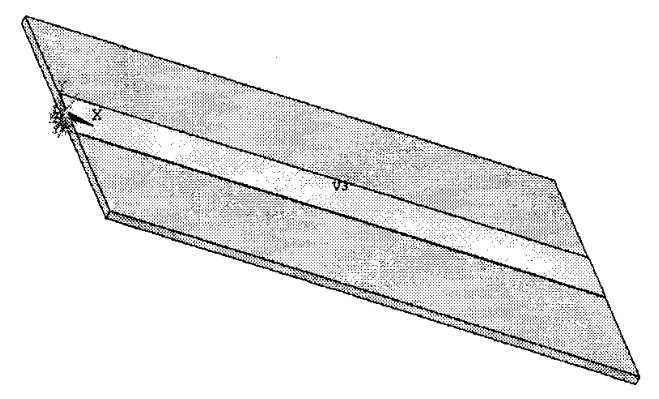
圖2 三明治懸臂板幾何模型
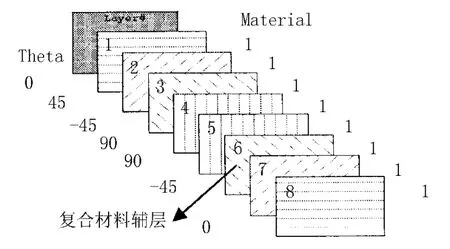
圖3 復(fù)合材料面板鋪層示意圖
復(fù)合材料的工程常數(shù)為

夾心材料的材料性質(zhì)為

壓電材料的材料性質(zhì)為
壓電常數(shù)為

相對介電常數(shù)為1 800。
作動器由固端到自由端平均分成五個部分,相當(dāng)于五個作動器,這五個作動器同時又是傳感器。反饋電壓乘上反饋矩陣就得到控制電壓。固端反饋的電壓最大,自由端反饋的電壓最小,因此控制電壓固端的電壓最大,自由端的電壓最小,這樣可以達(dá)到較好的控制效果。
板自由端某節(jié)點無阻尼自由振動見圖4 a),可以看出由于沒有考慮結(jié)構(gòu)阻尼,振幅保持不變,維持在約12 mm,圖4 b)是經(jīng)過比例反饋控制后的位移響應(yīng)圖,經(jīng)過比較可以看出經(jīng)過作動器的循環(huán)反饋控制,振幅在2 s內(nèi)已得到了有效的控制。

圖4 控制前后懸臂板自由端位移響應(yīng)對比圖
2.2 兩端固支的鋼板
圖5為1 000 mm×500 mm×15 mm的鋼板,板的兩端是固支。
材料性質(zhì)為

壓電材料為PZT,材料性質(zhì)跟算例1中的一樣,壓電作動器有4個,尺寸為500 mm×200 mm ×1 mm,都貼在鋼板上下表面的靠近固端處,見圖5中黑色部分。恒值反饋控制加的電壓為500 V。
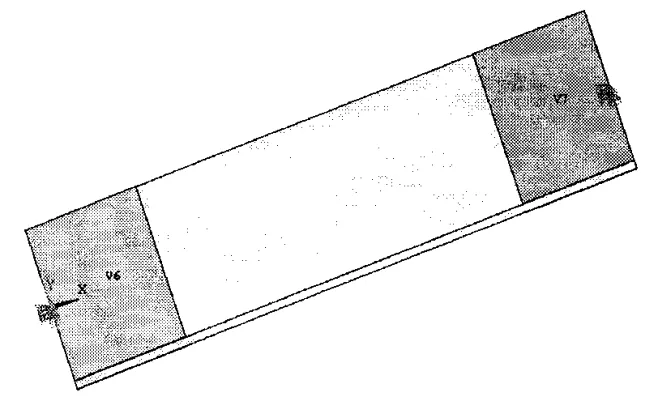
圖5 兩端固支的鋼板幾何模型
經(jīng)過恒值反饋控制后的振幅隨時間變化情況見圖6,可以看出船舶上比較厚的鋼板也可以得到很有效的控制。
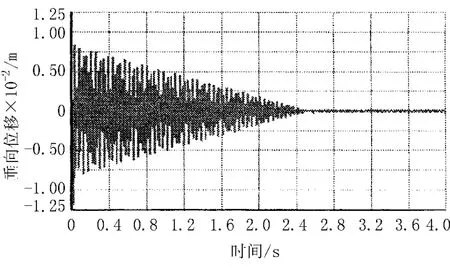
圖6 控制后鋼板中心點處的位移相應(yīng)圖
3 結(jié)論
采用智能結(jié)構(gòu)技術(shù),把壓電材料粘貼在船舶板梁結(jié)構(gòu)表面,通過在有限元軟件ANSYS中用APDL語言構(gòu)造循環(huán)反饋控制系統(tǒng)給作動器施加電壓,并采用恒值反饋和比例反饋兩種控制方法,使結(jié)構(gòu)振動得到有效控制,研究表明:
1)把壓電材料貼在船舶上的復(fù)合材料板以及鋼板上,也可以使比較大的結(jié)構(gòu)在振動中得到比較有效的控制。
2)其他條件不變的情況下,在壓電材料擊穿電壓范圍內(nèi),適當(dāng)增加電壓可以產(chǎn)生更好的控制效果
3)合理布置作動器的位置,可以用相對小的代價使結(jié)構(gòu)得到有效的控制。
4)在工程應(yīng)用中,比較容易控制的結(jié)構(gòu)可以用比例反饋控制,這樣節(jié)省資源,而且控制效果比較好,如果有些結(jié)構(gòu)比較難控制,比如,厚的鋼板則可以采用恒值反饋控制,電壓加大一點,這樣控制效果會相對比例反饋更加有效。
從而驗證了智能結(jié)構(gòu)在結(jié)構(gòu)尺寸和厚度比較大的船舶板梁結(jié)構(gòu)振動控制的可行性,可以給船舶結(jié)構(gòu)振動控制提供一種新的途徑。
[1]夏人偉.大型航天器結(jié)構(gòu)與力學(xué)問題綜述[J].宇航學(xué)報,2001,22(4):1-6.
[2]Kazuro Kageyama,Isao Kimpara,Toshio Suzuki,etc.Smart marinestructurs:an approach to the monitoring of ship structures with fiber-optic sensors[J].Smart Mater Struct,1998(7):472-478.
[3]唐友剛,馬網(wǎng)扣,楊 鋼等.海洋結(jié)構(gòu)智能監(jiān)測與振動控制技術(shù)的最新進(jìn)展[J].海洋工程,2003,21(2):103-106.
[4]余 音,金咸定,夏人偉.一種壓電復(fù)合材料層合板機(jī)電耦合有限單元[J].上海交通大學(xué)學(xué)報,1998,32(11):131-134.
[5]余 音,夏人偉.含壓電作動器和傳感器的復(fù)合材料層板靜變形有限元分析和形狀控制研究[J].復(fù)合材料學(xué)報,1997,14(2):114-119.
[6]Dawood T A.Predicting damage in polymer sandwich beams using wavelet transforms based on strain signals from FBGsensors[D].School of Engineering Sciences.Ship Science.University of Southampton,2005.
[7]姚熊亮,顧玉鋼,楊志國.壓電類智能結(jié)構(gòu)在船體振動控制方面的應(yīng)用研究[J].哈爾濱工程大學(xué)學(xué)報,2004,25(6):695-699.
[8]Xu S X,Koko T S.Finite element analysis and design of actively controlled piezoelectric smart structures[J].Finite elements in analysis and sedign,2004(40):241-262.
[9]Narayanan S,Balamurugan V.Finite element modeling of piezolaminated smart structures for active vibration control with distributed sensors and actuators[J].Journal of Sound and Vibration,2003,262:529-562.
[10]Thornburgh R P,Chattopadhyay A.Transient vibration of smart structures using a coupled piezoelectricmechanical theory[J].Journal of Sound and Vibration,2004,274:53-72.
Feedback vibration control by smart marine structure
CHEN Jian-Feng YU Yin
School of Naval Architecture,Ocean and Civil Engineering Shanghai Jiaotong University Shanghai 200030
Technology of smart structure was researched to control the structure vibration according to the character of ship structure.The constitutive equations of PZT material were given.And the finite element dynamical equations of smart structure,including smart actuator and sensor,were deduced.A feedback controlling system of smart structure wasimitated numerically in ANSYS.Two typical examples of vibration control by smart structure highlights the feasibility of using smart structure to control the vibration of big size structure on the ship,which shows a new approach to the vibration control of ship structure.
smart structure actuator vibration control ANSYSsandwich composite
661.44
A
1671-7953(2007)02-0028-04
2006-07-12
修回日期2006-10-22
陳建峰(1982—),男,碩士生。
*國家自然科學(xué)基金資助項目(編號:50479014)
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
纖維復(fù)合材料(2018年3期)2018-04-25 07:22:58
電子測試(2017年11期)2017-12-15 08:57:13
機(jī)械工程師(2015年10期)2015-02-02 01:14:03
應(yīng)用化工(2014年10期)2014-08-16 13:11:29
機(jī)電產(chǎn)品開發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24
無機(jī)化學(xué)學(xué)報(2014年4期)2014-02-28 17:31:11
上海金屬(2013年4期)2013-12-20 07:57:18
