多障礙物場景下的視頻傳感器覆蓋優化方法研究
2025-03-04 00:00:00陳海燕盧蕾
物聯網技術 2025年5期

摘 要:在實際的視頻傳感器網絡監測環境中,通常會存在較多障礙物對監測區域形成遮擋,從而產生監測盲區。此外,視頻傳感器初始部署時往往采用隨機部署的方式,會導致部分傳感器節點位于監測區域的邊界處,使得其感知范圍超出監測區域,從而影響整體覆蓋效果。針對上述問題,提出了一種基于邊界機制融合虛擬力算法的視頻傳感器網絡覆蓋優化方法。首先,采用邊界機制將視頻傳感器節點的感知范圍約束在監測范圍內;其次,引入虛擬力算法,通過調整節點與節點之間、節點與障礙物之間的相互作用力,實現避障功能;最后,采用改進的鯨魚優化算法進行覆蓋優化。實驗結果表明,該方法能夠有效提升視頻傳感器網絡的覆蓋率。
關鍵詞:視頻傳感器網絡;多障礙物;邊界機制;虛擬力算法;覆蓋優化;節點部署
中圖分類號:TP39;TN919.82 文獻標識碼:A 文章編號:2095-1302(2025)05-00-05
0 引 言
視頻傳感器網絡(Video Sensor Networks, VSNs)在終端集成了音頻、視頻、圖像等采集設備(如麥克風和攝像機等),從而大幅提升了傳感器網絡在聲音、圖像和視頻方面的采集與處理能力[1],能夠獲取更為豐富、全面的待監測對象的信息。視頻傳感器網絡已被廣泛應用于環境監測[2]、氣象監測[3]、城市交通管理[4]等多個領域。目前,視頻傳感器網絡大多采用隨機部署的方式,直接投擲或灑拋在待監測區域,這種部署方式往往會導致視頻傳感器網絡在待監測區域內形成覆蓋重疊或空洞,導致待監測區域內的目標無法得到有效覆蓋。為了實現視頻傳感器網絡對待監測區域的無縫覆蓋,需要合理地部署視頻傳感器網絡,對視頻傳感器節點的位置和方向進行調整。同時,在實際的監測環境中,往往會出現各種障礙物,如建筑物、山脈等,并且部署在監測區域邊界處的傳感器節點的感知范圍會超出監測區域,影響網絡的整體覆蓋效果。因此,需要對障礙物場景下的視頻傳感器網絡進行覆蓋優化,確保待監測區域的全面覆蓋,降低部署成本。
文獻[5]針對監測區域存在障礙物的VSNs覆蓋優化問題,提出了一種改進的競爭群優化方法,該方法通過結合虛擬力和Vironoi圖來提高網絡的覆蓋性能。文獻[6]針對多障礙物場景下野生動物監測的視頻傳感器節點部署問題,提出了一種針對受障礙物影響的虛擬力與粒子群融合的視頻傳感器網絡覆蓋優化算法,有效提高了節點在障礙物場景中的覆蓋率。文獻[7]提出了一種基于粒子群算法的面向三維感知有向傳感器節點的網絡覆蓋優化算法,通過調節重疊覆蓋區域、有效覆蓋區域與障礙物遮擋區域之間的相互作用力,有效提高了網絡的覆蓋率。文獻[8]針對特定地理位置和存在障礙物情況下的無線傳感器網絡隨機部署問題,提出了一種高效的自主部署方案,通過使用避障虛擬力算法,增強網絡覆蓋范圍,并確保存在障礙物時的網絡連接。
綜上所述,針對障礙物場景下的視頻傳感器覆蓋優化,考慮節點與節點之間、節點與障礙物間的相互作用力,可以有效提高網絡的覆蓋率。因此,本文針對多障礙物場景下視頻傳感器網絡節點的部署問題,在改進鯨魚優化算法的基礎上,提出了一種邊界機制融合虛擬力算法的視頻傳感器網絡覆蓋優化方法,即BVFA+SGWOA(Boundary Virtual Force with Second Generation Whale Optimization Algorithm),實現了對監測區域的覆蓋優化。該方法不僅能使節點在部署過程中有效避開各種形狀的障礙物,還能將超出邊界的節點的感知范圍約束在監測區域內。
1 多障礙物場景下的有效覆蓋面積
假設監測區域是面積為L×L的二維封閉平面 ,在此監測區域中隨機部署N個視頻傳感器節點{s1, s2, ..., sN}。
為了使多障礙物場景下的視頻傳感器網絡覆蓋時使用最少的節點,且在避障前提下,使得有效覆蓋率最大化,可以將多障礙物場景下的視頻傳感器網絡覆蓋率最大化問題表述為:找到一組lt;α*1, α*2, ..., α*Ngt;的視頻傳感器節點的最優有效覆蓋率,在避免障礙物阻擋的情況下,使得目標函數pr(α*1, α*2, ..., α*N)取得最大值,其數學表達式如下:
2 多障礙物場景下視頻傳感器網絡覆蓋優化問題分析
本文在改進的鯨魚優化算法(SGWOA)的基礎上,對多障礙物場景下的障礙物規避和分布在邊界區域的邊界節點的處理方法進行研究,提出了一種基于邊界機制和虛擬力(BVFA)的視頻傳感器網絡覆蓋優化算法。該算法將傳感器節點視作虛擬勢場中的電荷,各電荷之間都存在引力或斥力。通過分析虛擬電荷與障礙物及邊界節點之間虛擬力的相互作用,靈活調整傳感器節點的感知方向,使其避開障礙物,并將邊界節點的感知方向向監測區域旋轉,從而顯著提高網絡覆蓋率,增強算法的覆蓋性能。
2.1 邊界機制
為了解決邊界節點感知范圍超出監測區域的問題,利用邊界機制方案來約束邊界處的視頻傳感器節點,確保其感知范圍不超出指定的邊界,有助于提高視頻傳感器的覆蓋率。邊界機制[5]通常是用于約束候選解的群體在整個可行性空間中進行搜索,這種搜索機制的數學表達式如下:
2.2 虛擬力分析
為了研究虛擬力下的覆蓋優化算法,對視頻傳感器節點的虛擬力進行分析,利用虛擬力來模擬傳感器節點之間的相互作用。虛擬力被定義為傳感器節點之間的排斥力或吸引力,通過虛擬力來優化傳感器節點的位置和方向,能夠解決傳感器節點間的覆蓋和重疊問題,可以有效提高整個視頻傳感器網絡的覆蓋性能。假設每個傳感器節點si會受到來自其相鄰傳感器節點sj的吸引力或排斥力(Fij)和來自障礙物或邊界處的吸引力或排斥力(Fiob),則視頻傳感器節點上的合力為:
2.2.2 視頻傳感器節點對障礙物或邊界處的作用力
在實際的監測環境中,通常會存在各種形狀的障礙物,并且處在邊界區域的邊界節點的感知覆蓋范圍會超出邊界,此時障礙物或邊界處會對傳感器節點施加排斥力。圖1所示為障礙物或邊界處的受力分析圖,其中ci是有向傳感器節點的質心點,其位置是在扇形對稱軸上,并且一個傳感器節點有且只有一個質心點。在虛擬勢場中,質心點會受到一個或多個質心點的斥力作用,視頻傳感器節點的監測區域中存在障礙物或節點處于邊界區域時,障礙物和邊界處任意一點pi到視頻傳感器節點質心的斥力分別為Fib和Fio,兩者的合力為Fiob,因此當視頻傳感器節點的質心受到合力Fiob的作用時,傳感器節點受合力的影響會沿逆時針方向轉動。
假設diob是傳感器節點si到障礙物或邊界處bj的垂直距離,dth_iob是預先設定的傳感器節點到障礙物或邊界處的閾值距離。當diob小于dth_iob時,則障礙物或邊界對傳感器節點si產生排斥力,其表達式如下:
3 基于BVFA+SGWOA算法在多障礙物場景下的覆
蓋優化
本文將SGWOA覆蓋優化算法和BVFA算法相結合,提出了一種基于BVFA+SGWOA的多障礙物場景下的覆蓋優化算法。
本文根據SGWOA算法的原理,首先將視頻傳感器節點看作鯨魚個體,計算每只鯨魚的適應度函數值,適應度函數值表示視頻傳感器節點的覆蓋效果,對每只鯨魚個體加入邊界機制和虛擬力算法,保證每只鯨魚的移動在設定的邊界范圍內,計算相鄰鯨魚間的相互作用力。假設當前最佳鯨魚個體的位置X″為(X1″, X2″, ..., Xi″),其中Xi″=(xi″, yi″),鯨魚個體的位置X j為(X1j, X2j, ..., Xij),則鯨魚個體在最佳鯨魚個體的影響下的最新位置X j_new為(X1j_new, X2j_new, ..., Xij_new)。在鯨魚每次迭代時,由式(8)、式(9)和式(10)更新鯨魚的位置和方向:
4 實驗結果與性能分析
4.1 實驗結果
本文在MATLAB2016a環境下進行實驗仿真,節點隨機部署在500 m×500 m的矩形區域內,隨機部署形狀不一的障礙物,其他相關參數設置見表1。
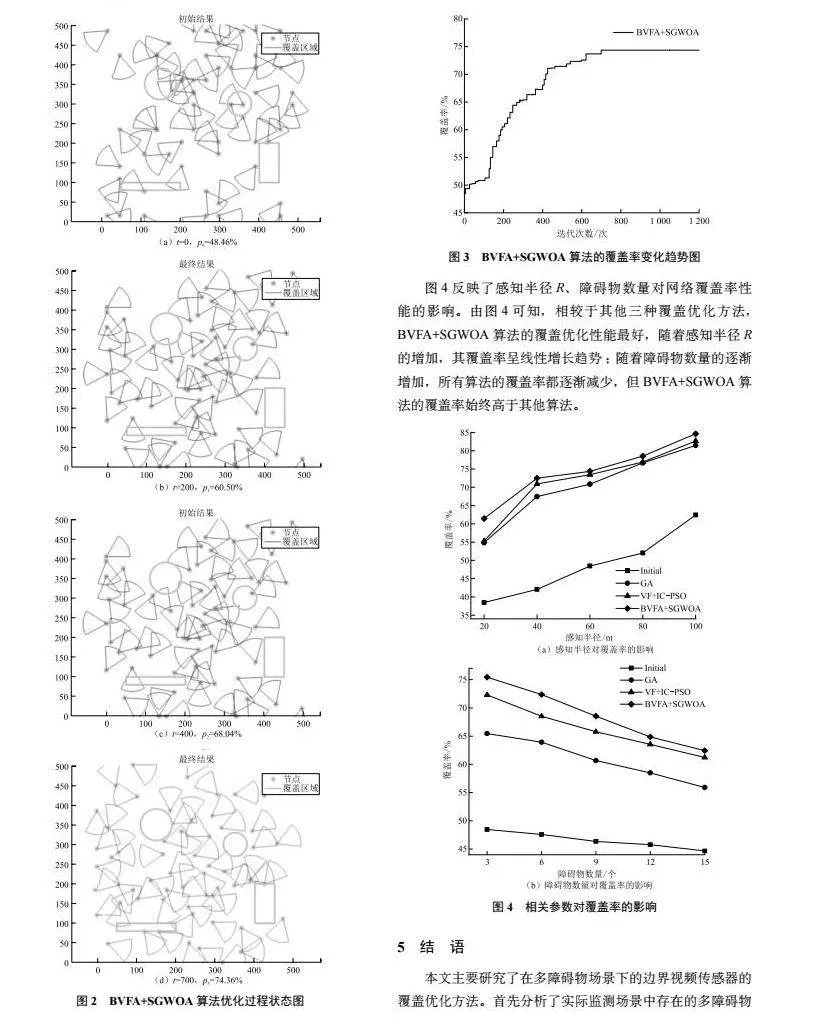
圖2(a)所示為初始狀態下傳感器節點的分布圖,其初始覆蓋率p0=48.46%。此時由于在監測區域中存在障礙物,以及邊界區域的邊界節點超出監測區域范圍,使得視頻傳感器網絡覆蓋率較低。采用多障礙物下的基于BVFA+SGWOA的視頻傳感器網絡覆蓋優化算法優化后的傳感器節點分布圖如圖2(b)、圖2(c)和圖2(d)所示,分別為迭代次數t=200、t=400和t=700時的視頻傳感器覆蓋優化狀態圖。從視頻傳感器覆蓋優化狀態圖中可以看出,當迭代次數從t=0開始依次增加時,通過BVFA+SGWOA算法的視頻傳感器網絡的覆蓋優化性能顯著增加,覆蓋率從初始部署48.46%增加到74.36%,增加了25.9個百分點,并且在障礙物周圍的各個傳感器節點的方向也發生了變化,達到了避障的效果,尤其是邊界處邊界節點的覆蓋性能也得到了顯著改善,極大地減少了超出邊界范圍的邊界節點數目。
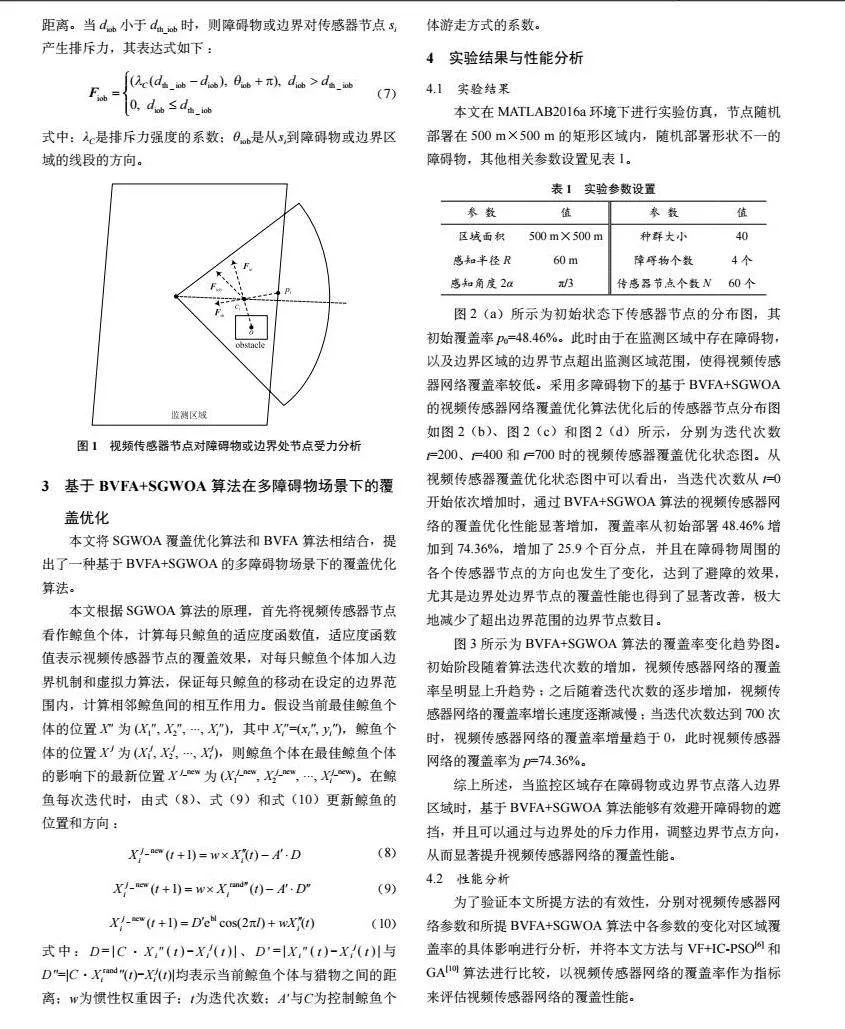
圖3所示為BVFA+SGWOA算法的覆蓋率變化趨勢圖。初始階段隨著算法迭代次數的增加,視頻傳感器網絡的覆蓋率呈明顯上升趨勢;之后隨著迭代次數的逐步增加,視頻傳感器網絡的覆蓋率增長速度逐漸減慢;當迭代次數達到700次時,視頻傳感器網絡的覆蓋率增量趨于0,此時視頻傳感器網絡的覆蓋率為p=74.36%。
綜上所述,當監控區域存在障礙物或邊界節點落入邊界區域時,基于BVFA+SGWOA算法能夠有效避開障礙物的遮擋,并且可以通過與邊界處的斥力作用,調整邊界節點方向,從而顯著提升視頻傳感器網絡的覆蓋性能。
4.2 性能分析
為了驗證本文所提方法的有效性,分別對視頻傳感器網絡參數和所提BVFA+SGWOA算法中各參數的變化對區域覆蓋率的具體影響進行分析,并將本文方法與VF+IC-PSO[6]和GA[10]算法進行比較,以視頻傳感器網絡的覆蓋率作為指標來評估視頻傳感器網絡的覆蓋性能。
圖4反映了感知半徑R、障礙物數量對網絡覆蓋率性能的影響。由圖4可知,相較于其他三種覆蓋優化方法,BVFA+SGWOA算法的覆蓋優化性能最好,隨著感知半徑R的增加,其覆蓋率呈線性增長趨勢;隨著障礙物數量的逐漸增加,所有算法的覆蓋率都逐漸減少,但BVFA+SGWOA算法的覆蓋率始終高于其他算法。
5 結 語
本文主要研究了在多障礙物場景下的邊界視頻傳感器的覆蓋優化方法。首先分析了實際監測場景中存在的多障礙物和邊界節點感知范圍超出待檢測區域的問題給視頻傳感器網絡覆蓋性能帶來的影響,在此基礎上提出了邊界機制融合虛擬力算法的覆蓋優化方法,通過邊界機制將傳感器節點限制在指定的區域中,然后引入虛擬力算法來調整傳感器節點的感知方向,最后采用改進SGWOA算法來優化網絡的覆蓋性能。實驗結果表明,相較于其他優化方法,本文所提出的覆蓋優化算法性能更加優秀,能夠有效提升視頻傳感器網絡的覆蓋率。
參考文獻
[1]權恩猛. 視頻傳感器網絡覆蓋算法研究[D].綿陽:西南科技大學,2018.
[2] JAMROEN C, KOMKUM P, FONGKERD C, et al. An intelligent irrigation scheduling system using low-cost wireless sensor network toward sustainable and precision agriculture [J]. IEEE access, 2020, 8: 172756-172769.
[3] AL QUNDUS J, DABBOUR K, GUPTA S, et al. Wireless sensor network for AI-based flood disaster detection [J]. Annals of operations research, 2020, 319: 697-719.
[4] HILMANI A, MAIZATE A, HASSOUNI L. Automated real-time intelligent traffic control system for smart cities using wireless sensor networks [J]. Wireless communications mobile computing, 2020: 1-28.
[5] MUSIKAWAN P, KONGSOROT Y, MUNEESAWANG P, et al. An enhanced obstacle-aware deployment scheme with an opposition-based competitive swarm optimizer for mobile WSNs [J]. Expert systems with applications, 2022, 189: 116035.
[6] ZHANG Y. Research on video sensor networks coverage optimization method in obstacle scene [C]// 2023 2nd International Conference on Machine Vision, Automatic Identification and Detection(MVAID 2023). HangZhou, China: Journal of Physics: Conference Series, 2023.
[7]李娜,向鳳紅,毛劍琳,等. 多障礙場景的有向傳感器網絡覆蓋優化算法[J]. 計算機工程,2015,41(4):19-25.
[8] ROUT M, ROY R. Dynamic deployment of randomly deployed mobile sensor nodes in the presence of obstacles [J]. Ad hoc networks, 2016, 46: 12-22.
[9]關志艷,黃向生. 隨機障礙物下的有向傳感器網絡覆蓋優化算法[J]. 小型微型計算機系統,2020,41(11):2380-2385.
[10]權恩猛. 基于遺傳算法的多障礙區域最大覆蓋優化 [J]. 工業控制計算機,2017,30(12):108-110.