無人機在農業實踐中的應用
2025-02-20 00:00:00劉啟超樊磊周培深
智慧農業導刊 2025年4期
關鍵詞:無人機



摘" 要:無人機技術在農業生產實踐中具有操作便捷、監測成本低、效率高和數據可靠等優勢,已成為智慧農業管理的重要手段。該文利用搭載多光譜相機的無人機、圖像處理軟件,對巡田飛行參數設置、田壟高度測定,以及作物田間倒伏情況的監測進行探討。結果表明,通過不同飛行高度的設定可以實現多目的監測要求,利用數字高程圖可以實現對田壟高度等小尺度高差的精確測定,借助多光譜圖像可以對田間作物倒伏面積進行估算。該文為無人機的農事管理實際應用提供參考與借鑒。
關鍵詞:無人機;農事管理;數字高程模型;多光譜;飛行參數
中圖分類號:S127" " " 文獻標志碼:A" " " " " 文章編號:2096-9902(2025)04-0030-06
Abstract: Unmanned aerial vehicle (UAV) technology has the advantages of convenient operation, low monitoring cost, high efficiency, and reliable data in agricultural production practice, and has become an important means of smart agricultural management. In this paper, unmanned aerial vehicles equipped with multi-spectral cameras and image processing software are used to discuss the setting of field patrol flight parameters, the measurement of field ridge height, and the monitoring of crop field lodging. The results show that multi-purpose monitoring requirements can be achieved through different flying altitude settings, digital elevation maps can be used to accurately measure small-scale height differences such as field ridge heights, and multi-spectral images can be used to estimate the lodging area of crops in the field. This paper provides a reference for the practical application of unmanned aerial vehicles in agricultural management.
Keywords: unmanned aerial vehicle (UAV); farming management; digital elevation model; multi-spectral image; flight parameters
農業現代化的主要標志是其智能化,無人機技術是實現智慧農業的重要手段之一。無人機(unmanned aerial vehicle,UAV)是指通過無線遙控規劃航線飛行的不載人飛行器[1],在研發之初即備受矚目,隨著應用技術的日益成熟,因其難以替代的機動靈活、高效快速、精細準確、作業成本低、適用范圍廣和生產周期短等獨特優勢[2],目前廣泛用于農業、地質、氣象和電力等行業。農業無人機是專為農業監控、應用而設計的無人機,用于農業監測的無人機配備了不同用途的傳感器和成像設備,如高清攝像頭、激光雷達、多光譜相機,使其能夠收集有關作物生長、土壤狀況等農業生產要素數據信息。而搭載播撒平臺的農用無人機主要進行農作物播種、農藥化肥噴灑等遠程遙控操作,由于后者技術更易于掌握已成為田間農事常用技術。這種農用無人機的農事作業也需要首先對農田進行圖像采集,然后基于采集信息做出判斷,通過設置地塊范圍進行具體播種和噴灑活動。因此,無人機的遙感檢測技術對于其農業應用至關重要,它不僅相較衛星遙感技術更具強實時性、高效率、高精度等優點[3],也在實際應用中證明了數據采集處理的可靠性[4],并展現了通過數據積累和技術改進在農業領域發揮更大作用的可能性[5]。
無人機用于農業監測主要依靠基于RGB相機、多光譜及高光譜相機采集的圖像信息,并輔以專業圖像處理軟件進行分析,如利用地理識別軟件ArcGIS(Geographic Information System),通過柵格數據矢量化使由像素或網格單元格組成的柵格數據轉換為矢量數據[6],使數據結構緊湊、冗余度低,利于無人機拍攝圖像的存儲、繪圖及檢索分析。已報道的以無人機輔助進行的農業監測主要包括田間旱情監測、農作物長勢及病蟲害監測、產量估算等。此外,在農戶實際操作中,還可以利用無人機進行承包田塊面積測量、地勢測繪等農事活動。本文以極飛無人機為例,通過飛行參數選擇,以及數字高程圖、多光譜圖像數據的采集分析,實現農事管理中無人機巡田、壟高溝深監測和作物倒伏情況統計的實際應用。
1" 材料與方法
本文所選用無人機為極飛M500,配備XCam 20M 多光譜云臺相機,搭載1英寸2 000萬像素RGB相機,以及4個光譜通道高感光CMOS傳感器,分別為綠(B)550 nm、紅(R)660 nm、紅外(REG)735 nm和近紅外(NIR)790 nm。通過云臺相機可進行五通道成像像素級自動對齊,全自動光敏輻射校準,采集高清RGB可見光影像(分辨率5 120×3 840)及4個波段多光譜影像(分辨率1 280×720)。本文無人機數據采集地點為安徽省宣城市宣州區農田,中心坐標為東經118.60°,北緯30.80°。在云臺相機采集圖像的同時,利用無人機所配備的RTK(Real Time Kinematic,實時動態測量)裝置,通過實時連接地面基站修正定位坐標[7],實現對每張圖片空間位置的精確記錄。
無人機采集的圖像數據使用Agisoft Metashape Professional和ArcGIS進行處理。無人機拍攝的原始圖像數據首先以Agisoft Metashape Professional進行三維模型重建,得到全景圖像。然后將處理后的圖像數據導入ArcGIS軟件,進行數字化屬性數據的采集、空間數據格式轉換、矢量數據空間校正等,通過進一步分析獲得高程數據和實地面積等信息。
2" 結果與分析
2.1" 巡田飛行參數設定
利用無人機對田塊進行巡查是一種高效、現代化的農業管理手段。在具體操作時,可以根據田塊的大小、巡查目的調整無人機的飛行參數和搭載的傳感器設備。飛行參數設置是確保飛行作業任務完成的關鍵[1],航線的設置規劃需基于地形地貌,考慮氣象因素,并使飛行高度、重疊度等參數與無人機外業具體需求相匹配。如選用較低飛行高度以提供更詳細的田間圖像,適用于需要高分辨率圖像的精細巡查;較高的飛行高度則可以覆蓋更大面積,適用于快速巡查或對大面積田塊整體狀況進行評估。同時,無人機技術的發展也使超低空航拍成為可能[8]。因此,可依據實驗結果調整設置飛行參數,獲取不同分辨率圖像數據,實現不同監測目的,或對同一田塊進行多個尺度的分析。
以極飛無人機M500為例,航向重疊度為70%、旁向重疊度為70%,分別設置368.0 m(分辨率8.0 cm/像素)、227.0 m(分辨率5.0 cm/像素)、100.0 m(分辨率2.2 cm/像素)、67.5 m(分辨率1.5 cm/像素)、45.0 m(分辨率1.0 cm/像素)和31.5 m(分辨率0.7 cm/像素)共計6個飛行高度,采集不同分辨率圖像信息,探討實現田間小尺度目標物觀察、較大面積田塊巡查為目的的無人機飛行參數設定。
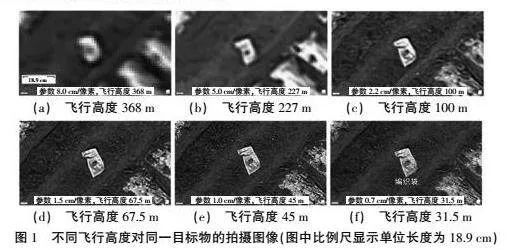
為實現對小尺度目標物的精細觀察,以田間農資編織袋為目標物進行不同飛行高度圖像采集,結果如圖1所示。當飛行高度為368.0 m時,目標物難以識別(圖1(a));當飛行高度為227.0 m時,所攝取目標物圖像仍較模糊(圖1(b))。隨著飛行高度降低,圖像清晰度逐漸升高,在飛行高度為100.0 m時,目標物基本可識別(圖1(c)),而當飛行高度為67.5、45.0、31.5 m時,均能夠實現目標物的清晰識別(圖1(d)—(f))。
當拍攝編織袋所在的較大面積周邊地塊時,如圖2(1.74畝,1畝約等于667 m2)所示,無論在飛行高度為368.0、227.0和100.0 m(圖2(a)—(c)),還是67.5、45.0、31.5 m時(圖2(d)—(f)),田間小尺度目標物均難以辨識,且所拍攝較大田塊的RGB圖像的清晰度并未顯示明顯差異。
實驗結果表明,在進行田間小尺度目標精細識別時,隨著無人機飛行高度的降低,目標物的清晰度明顯提高。但同時飛行高度的降低也會增加拍攝圖片數量、存儲空間,以及飛行航次和測繪時間。以上述6個飛行高度拍攝同一203畝田塊時所需的數據量統計(表1),當飛行高度從368.0 m降低至31.5 m時,圖像分辨率由8.0 cm/像素提高至0.7 cm/像素,但所需拍攝圖片數量相應由28個(144 Mb)增至1 895個(9 759 Mb),無人機飛行航次由1次(15 min)增至42次(630 min)。因此,在選擇飛行高度參數時,需權衡目的與效率。以極飛M500無人機為例,在目標田塊初步勘察階段,可采用最高飛行高度368.0 m(8.0 cm/像素)進行首次試飛,快速獲取地塊整體信息,迅速確定目標區域的地理坐標。在執行小面積(不超過20畝)農田作物精細監測時,建議飛行高度設置為45.0 m;20~200畝巡田時,可將飛行高度提高至100.0 m,而對于超過200畝的大面積巡查區域,需將飛行高度設定為227.0 m。
2.2" 利用數字高程圖測定起壟高度
在無人機農田管理中,還可能需要對規模化種植田塊的起壟高度、溝渠深度進行監測,這也是影響農作物栽培管理的重要因素。壟高和溝深實際上是小尺度的地勢差異,可以利用無人機數字高程圖的繪制功能進行測定。高程圖即用以表示某一地塊海拔高低的圖像。無人機測量高程的原理是利用全球定位系統,在飛行過程中通過與基站、衛星等的連接獲取飛行器所處的空間信息,由此可計算田塊在高度上的細微差異。
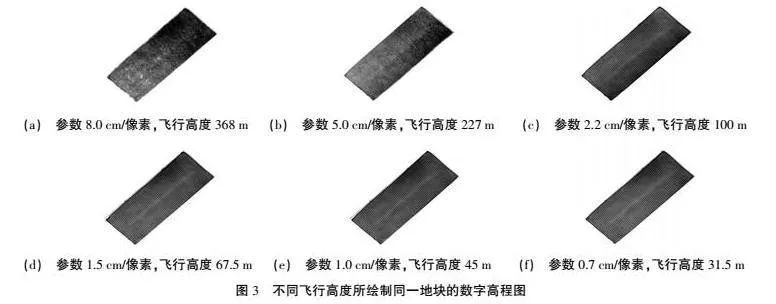
本文選取同一耕作田塊(5.21畝)為樣地,利用無人機測量田塊的起壟高度。首先通過無人機采集圖像信息,然后利用ArcGIS軟件繪制數字高程圖。結果如圖3所示,圖3(a)—(f)分別為依據飛行高度368.0、227.0、100.0、67.5、45.0、31.5 m的拍攝圖像所繪制的高程圖。結果顯示,無人機飛行高度對通過ArcGIS軟件處理繪制的數字高程圖清晰度有影響,隨著飛行高度降低,高程圖清晰度提高。
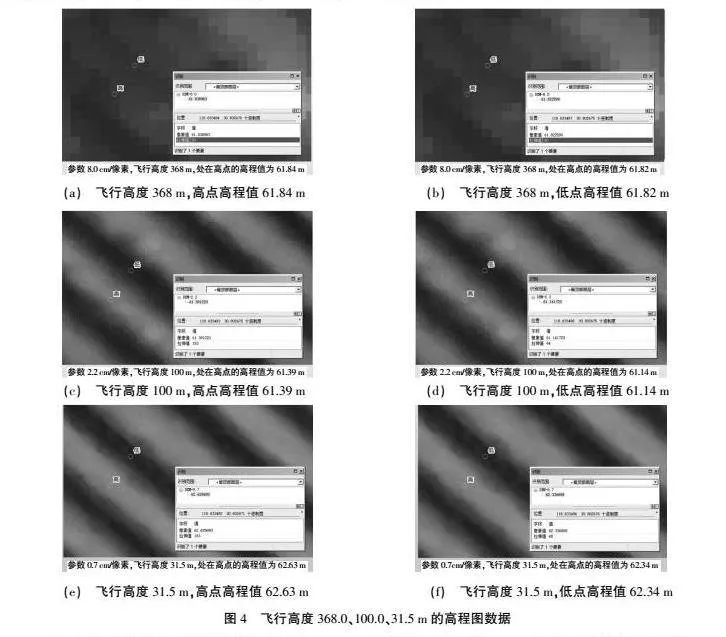
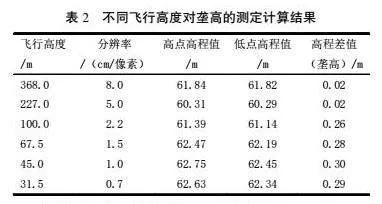
在高程圖中分別選取壟上(高)、壟下(低)地勢點,計算其地勢差,即為壟高。圖4為以不同飛行高度(368.0、100.0和31.5 m)示例的高程圖數據。將6個飛行高度計算得到的壟高數值列于表2。結果表明,由飛行高度368.0 m(分辨率8.0 cm/像素)和227.0 m(分辨率5.0 cm/像素)獲取的高程數據所測得的壟高(0.02 m)與實際壟高(平均0.30 m)差距較大,顯然不滿足精度要求。而在飛行高度降至100.0 m(分辨率2.2 cm/像素)時,由數字高程圖計算得到的壟高為0.26 m。進一步降低飛行高度至67.5 m(分辨率1.5 cm/像素)、45.0 m(分辨率1.0 cm/像素)和31.5 m(分辨率0.7 cm/像素)時,測得壟高分別為0.28、0.30和0.29 m。
根據圖4、表2結果可知:飛行高度為31.5 m和45.0 m時所測定壟高與田間實際值基本一致,飛行高度在67.5 m和100.0 m時,與田間實測值的誤差也較小。因此,可以利用無人機巡查過程中可同時獲取的高程數據,精確計算壟高溝深等小尺度地勢差異。通過飛行測試,以極飛M500為例,兼顧測量精度與工作效率,可在100.0 m飛行高度進行厘米級地壟高度的精確測定。
2.3" 利用多光譜圖像測定作物倒伏面積
田間作物由于暴風、驟雨等原因出現倒伏時,會影響其正常生長,尤其在水稻、小麥等糧食作物收獲前期,由于谷穗造成的“頭重腳輕”,更容易出現倒伏現象,而嚴重影響產量。因此,對田間作物倒伏情況的監測可及時準確統計受災面積,評估不同農作物選育材料的抗倒伏性,為農業生產、育種等提供數據和技術支持[9]。而無人機技術為田間作物倒伏監測提供了快捷、準確的新途徑,已有通過采集圖像計算作物高度對倒伏程度進行估算的報道[10],其原理與上述數字高程測繪相似。除了這種方法,本文以搭載多光譜云臺相機的無人機,利用4個波段(550、660、735、790 nm)的農田作物多光譜信息,進行倒伏情況的精確監測。
首先利用Agisoft Metashape Professional軟件的圖像拼接功能繪制如圖5(a)所示農田的RGB圖像,并對栽種不同水稻材料的地塊(PZ1、PZ2、PZ14、PZ15、PZ16、PZ17、PZ27、PZ28)進行標注。由于多光譜圖像可以提供更精細的單一波段光譜信息,并可將柵格分組值繪制為各個類別,進行測繪面積計算,因此進一步利用單波段對該區域進行圖像數據采集、繪制和柵格化分類,獲得如圖5(b)—(e)所示的550、660、730、790 nm光譜通道圖像。
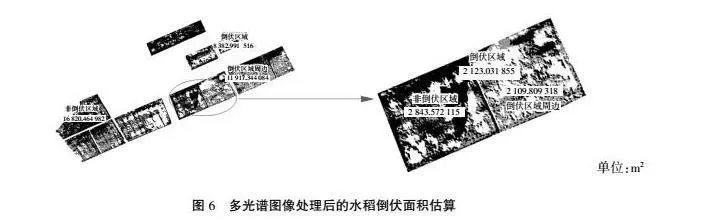
如圖5所示,由于莖稈與稻穗顏色差異,當作物倒伏后形成采集圖像中的淺色區域。通過比較圖5(b)—(e)中4個光譜通道單波段圖像,可以發現660 nm波長圖像(圖5(c))對水稻倒伏的辨識度最高。進一步將圖5(c)導入ArcGIS軟件進行柵格化分類,即可得到圖6結果。如圖6所示,黑色為未倒伏區域,白色為倒伏區域,灰色為倒伏附近區域(倒伏區域周邊)。利用ArcGIS軟件統計圖5(a)中所標注8個地塊的倒伏總面積約為8 382.99 m2,總體倒伏率為22.6%。其中,在地塊PZ1、PZ2、PZ14、PZ16、PZ17、PZ27、PZ28種植的水稻育種材料為LLY211,倒伏率為20.8%。在PZ15地塊種植的水稻材料為LY899,倒伏面積約為2 123.03 m2,倒伏率為30.0%。
3" 討論
相較于農業數據的傳統人工采集手段,無人機航拍技術以其高效率和低耗時的優勢,在減少勞動力資源成本投入的同時,顯著提升作業效率。此外,無人機所采集的數字化信息更便于連續追蹤或分析復查,極大提高數據的可利用性、可信性。本實驗采用極飛M500為示例,對無人機在農事管理中的實際應用進行了探討。在農業中應用的無人機以極飛、大疆2個品牌最為常見,其中極飛公司成立于2007年,農業領域產品與服務已遍及63個國家和地區,所產無人機主要分為農用植保無人機和遙感無人機兩大類[11],遙感無人機有M500和M2000系列,均可實現全自主飛行、高精度圖像自動采集等功能。本文雖以極飛M500遙感無人機進行應用示例,但對于不同型號無人機其應用原理一致,操作大同小異。我國農業無人機的發展現狀,已可在技術、服務和售價等方面確保新農人、承包農戶及合作社在實際應用中的可及性,顯著提升農業生產者對多樣化農事活動的管理效率。
在使用無人機搭載云臺相機進行圖像采集時,關注的主要參數為分辨率、航向重疊度和旁向重疊度。高于70%的重疊度可保證圖像拼接的準確性,而無人機的飛行高度決定著圖像的清晰度,即飛行高度越高,單張照片的拍攝范圍越大,而清晰度越低。因此,在兼顧農事管理實際需要與外業效率,協調圖像數量與清晰度條件下,設置適宜飛行高度參數至關重要。無人機采集的圖像數據還同時包含高度和定位信息,利用所獲取高程信息不僅可以繪制農田整體地勢,利于作物種植種類和灌溉系統的規劃,還可如本文所探討的進行厘米級高度差異的壟高溝深的遙感測定,對規模化農業耕作中的具體執行情況進行監測。
多光譜技術始于20世紀中葉,基于能夠同時在多個光譜波段工作的傳感器進行應用,這些傳感器可以捕捉地表物體在不同波長下的反射和輻射特性,以提供更全面的可分析數據。多光譜采集也同樣可通過搭載無人機用于觀察地表植物。根據植物的光譜特性,農業無人機所搭載多光譜相機通常包括綠色、藍色、紅色、紅邊和近紅外波段,尤其適用于NDVI(Normalized Difference Vegetation Index)等植被指數的監測[12-13]。相較于全光譜RGB圖像,單一波段光譜圖像可以對作物的光學特性差異進行更具區分度的呈現,如在本文中倒伏水稻的4個單波段光譜圖像中660 nm采集圖像對倒伏的辨別度最高。由此,便于進一步通過圖像柵格化分類準確計算倒伏面積。利用圖像柵格化分類分割技術進行目標識別,也是無人機遙感技術的一個重要環節[14],通過對采集地塊圖像的裁切、影像分類和矢量化,可以計算獲得多種植被指數[13]。此前已有研究通過深度學習技術構建了小麥倒伏區域的分割模型,該模型在區分直立與倒伏小麥時精確度可達97.25%[15]。
目前,農業無人機已顯現日益拓展的應用領域,對于植保無人機已有較系統的培訓,但其功能主要限于種子、化肥播撒和農藥噴施,尚缺乏基于測繪無人機、針對田間多樣化農事需求的實地應用指南與軟硬件技能培訓。本文為無人機在農事管理活動中的具體應用細節提供了參考與啟示。
4" 結論
本文探討了無人機在農業實踐(巡田、壟高測定、作物倒伏監測)中的實際應用。結果表明,通過調整飛行高度,可滿足農田的多尺度巡田需求,即在進行小面積(如20~200畝)農田巡查時,以極飛M500無人機為例,建議飛行高度設置約100 m;對于超過200畝的大面積巡田,建議將飛行高度升至200 m;需要對其中特定目標物進行精細核查時,飛行高度設定為50 m。利用數字高程圖,在100 m飛行高度可以實現厘米級地壟高度的精確測定;通過多光譜圖像處理可對田間作物倒伏面積進行準確估算,評估作物選育材料的抗倒伏能力。
參考文獻:
[1] 曾杰.無人機遙感技術在礦山測繪工程測量中的實踐與應用[J].世界有色金屬,2024(3):154-156.
[2] 陳發煜,王穎,陳煒.淺析無人機在高標準農田建設測繪中的應用[J].中國農業綜合開發,2023(2):43-45.
[3] 梁盛開,林甄,謝金冶,等.無人機在精準農業中的應用現狀分析[J].山西電子技術,2021(2):56-58.
[4] 周清波.國內外農情遙感現狀與發展趨勢[J].中國農業資源與區劃,2004(5):12-17.
[5] 李冰,劉镕源,劉素紅,等.基于低空無人機遙感的冬小麥覆蓋度變化監測[J].農業工程學報,2012,28(13):160-165.
[6] 黃思明,高群,高秋爽,等.ArcGIS中柵格數據矢量化在林草工作中的應用[J].林業勘查設計,2024,53(4):83-86.
[7] 黃毓,顧呈劍,周就貓,等.內置RTK無人機航拍技術在土地整治項目測繪與輔助規劃設計中的應用[J].湖南科技大學學報(自然科學版),2022,37(3):87-94.
[8] HILL A, ROWAN Y, KERSEL M. Mapping with Aerial Photographs: Recording the Past, the Present, and the Invisible at Marj Rabba, Israel [J]. Near Eastern Archaeology, 2014,77:182-186.
[9] CHAUHAN S, DARVISHZADEH R, BOSCHETTI M, et al. Remote sensing-based crop lodging assessment: Current status and perspectives [J]. ISPRS Journal of Photogrammetry, 2019,151:124-140.
[10] MURAKAMI T, YUI M, AMAHA K. Canopy height measurement by photogrammetric analysis of aerial images: Application to buckwheat (Fagopyrum esculentum Moench) lodging evaluation [J]. Computers and Electronics in Agriculture, 2012,89:70-75.
[11] 孫成軍.多旋翼極飛無人機植保情況分析[J].農業工程技術,2019,39(36):85-88.
[12] HABOUDANE D, MILLER J R, PATTEY E, et al. Hyperspectral vegetation indices and novel algorithms for predicting green LAI of crop canopies: Modeling and validation in the context of precision agriculture [J]. Remote Sensing of Environment, 2004,90(3):337-352.
[13] 王帝,孫榕,蘇勇,等.基于無人機多光譜影像的水稻生物量估測[J].農業工程學報,2024,40(17):161-170.
[14] 鄧廣.高空間分辨率遙感影像單株立木識別與樹冠分割算法研究[D].北京:中國林業科學研究院,2009.
[15] 申華磊,蘇歆琪,趙巧麗,等.基于深度學習的無人機遙感小麥倒伏面積提取方法[J].農業機械學報,2022,53(9):252-260,341.
猜你喜歡
電腦知識與技術(2016年28期)2016-12-21 12:21:32
電子技術與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時代·教師版(2016年27期)2016-12-06 18:14:59
中國科技縱橫(2016年17期)2016-11-30 11:51:57
農機使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業導報(2016年9期)2016-05-26 20:58:26
