油氣管道不動火帶壓堵漏裝置設計與仿真研究
2025-02-13 00:00:00劉璐賈曉麗楊晨李興濤劉海鵬
石油礦場機械 2025年1期
摘" 要:針對油氣管道不動火帶壓堵漏的技術難題和相應設備尚不完善的現狀,設計了一種適用于油氣管道不動火帶壓堵漏裝置,通過移動裝置到達工作位置后使用抱緊裝置將帶壓堵漏盒放置于管道漏點處,進而完成堵漏工作。首先,對抱緊裝置進行結構簡圖的繪制,分析并計算機構的自由度,通過理論力學中靜力學對機構中構件進行受力分析。其次,基于SolidWorks軟件對抱緊裝置中的各個零件進行三維建模。最后,基于Ansys 軟件對抱緊裝置的靜態結構進行有限元分析,對在工作狀態下的抱緊裝置進行應力、應變和總形變求解,得到對應云圖和參數。研究結果可為機械機構的安全穩定提供理論依據。
關鍵詞:不動火帶壓堵漏;有限元仿真;靜力學分析;油氣管道封
中圖分類號:TE973.8""""""""" 文獻標志碼:A""""" doi:10.3969/j.issn.1001-3482.2025.01.006
Design and Simulation Study of Pressurized Leakage Plugging Device for
Oil and Gas Pipelines
LIU Lu1,2, JIA Xiaoli1,2, YANG Chen1,2,LI Xingtao3,LIU Haipeng4
(1.College of Mechanical and Transportation Engineering, China University of Petroleum-Beijing, Beijing
102249,China; 2.Center of Advanced Oil and Gas Equipment, China University of Petroleum-Beijing, Beijing 102249,China;3.PetroChina International Exploration and Development Company Limited, Beijing 100034,China; 4.CNPC International Pipeline Company Limited, Beijing 102206,China)
Abstract:" In view of the technical difficulties involved in the leakage plugging of oil and gas pipelines using pressure without fire and the imperfect state of the relevant equipment, a device for the aforementioned purpose has been designed. A pressurized leakage plugging device was designed for oil and gas pipelines, which uses the holding device to place the pressurized leakage plugging box at the leakage point of the pipeline after arriving at the working position through the mobile device, and then completes the leakage plugging work. Firstly, a structural sketch of the holding device was designed, the degrees of freedom of the mechanism were analyzed and calculated, and the components in the mechanism were analyzed using the theoretical mechanics of static mechanics. Subsequently, each component of the holding device was modeled in three dimensions using SolidWorks software. Finally, a finite element analysis was conducted on the static structure of the clamping device using ANSYS Workbench software. This analysis enabled the calculation of stress, strain, and total deformation for the clamping device under the specified working conditions, and the generation of corresponding cloud diagrams and parameters. These results provide a theoretical basis for ensuring the safety and stability of the mechanical mechanism. Key words: pressurized leakage plugging without fire; finite element simulation; hydrostatic analysis; oil and gas pipeline plugging
收稿日期: 2024-08-30
基金項目: 國家自然科學基金(11872377,11402309);中國石油大學(北京)自然科學基金(2462020XKJS01)。
作者簡介:劉 璐(1996-),男,河北秦皇島人,博士,現從事石油礦場設備的設計和計算機仿真方面的工作,E-mail:luliujx@163.com。
通信作者: 賈曉麗(1980-),女,教授,現從事智能機器人及檢測技術、智能傳感與驅動相關研究,E-mail:xljia@cup.edu.cn。
文章編號:1001-3482(2025)01-0030-07
隨著全球能源需求的持續增長,油氣資源的開發與運輸在保障國家能源安全、促進經濟發展中扮演著至關重要的角色[1-2]。油氣管道作為連接油氣田與消費市場的關鍵基礎設施,其安全穩定運行直接關系到能源供應的連續性和可靠性[3-5]。然而,在實際運營過程中,油氣管道往往會因材料老化、腐蝕、外力損傷或操作不當等原因出現泄漏問題,不僅會造成巨大的經濟損失,還可能引發環境污染、火災甚至爆炸等嚴重后果,嚴重威脅公共安全與生態環境[6-9]。因此,如何高效、安全地處理油氣管道泄漏,成為油氣行業亟待解決的技術難題。傳統的管道修復方法往往需要停運管道、排空管內介質后進行修復,這不僅耗時耗力,而且會造成巨大的經濟損失和社會影響[10-13]。為此,帶壓堵漏技術應運而生,并逐漸成為油氣管道泄漏應急處理的重要手段。帶壓堵漏技術能夠在管道不停輸、不降壓的情況下,迅速對泄漏點進行封堵,確保油氣管道的安全運行,減少因泄漏帶來的損失。
使用機器人進行遠程帶壓堵漏不僅準備時間短、反應速度快、操作精度高,適合通常口徑的煤氣管道。而且杜絕了因煤氣泄漏對維修人員的生命安全的危害,縮短了堵漏工作的準備時間,有效地降低了事故發生的危險[14-15]。因此,本文聚焦于油氣管道帶壓堵漏裝置的設計與仿真研究,旨在通過創新設計思路與先進的仿真技術,開發出一種高效、可靠、易于操作的帶壓堵漏裝置,為油氣管道的應急搶修提供有力的技術支持。將帶壓堵漏盒安置于在漏點處,將修補材料注入漏點形成的腔室內,完成堵漏工作。堵漏全過程對管道內外的溫度、壓力等幾乎沒有影響,也沒有明火等危險因素,可以真正實現不停產的帶壓堵漏,縮小了因管道維修導致的停產時間,顯著地提高了企業的生產效率。帶壓堵漏機器人的設計結合機電系統和高分子材料的應用,克服了傳統的堵漏方式時因泄漏有害氣體對人體的影響,解決了不同情況下管道泄漏的堵漏問題。本研究不僅具有重要的理論價值,能夠豐富和完善油氣管道帶壓堵漏技術的理論體系,同時也具有廣泛的應用前景,能夠為油氣管道的應急搶修提供高效、可靠的技術解決方案,對保障油氣管道的安全運行、減少經濟損失與環境污染具有重要意義。
1 帶壓堵漏裝置技術指標與總體設計
1.1 帶壓堵漏技術指標
本文開展的工作制定工況環境為油氣管道,管道材質多為碳素結構鋼Q235,選擇分析的管道直徑DN80~DN2 000,管壁厚為4.5~12 mm,常用壓力為30 kPa。堵漏機器人需要到達工作位置后,進行管道漏點的堵漏。為簡化機器人的機械機構和抱緊方式,滿足直徑要求,選擇直徑為1 m,壁厚為6 mm的管道進行分析。
1.2 帶壓堵漏方案設計
帶壓堵漏機器人的設計方案如圖1所示。堵漏作業的流程具體如下:首先,判斷工作環境是否適合進行堵漏作業;若適合堵漏機器人作業,將堵漏機器人移動到指定工作位置,使用可見光視覺系統尋找漏點,觀察并記錄管道漏點形狀。通過調整機械臂將抱緊裝置抱緊管道并將帶壓堵漏盒預緊到泄漏點,通過驅動抱緊裝置讓堵漏裝置盒緊固并持續4~6 h至金屬修補劑密封漏點。判斷堵漏工作完成情況無誤后,卸載除了堵漏盒以外的其他裝置,完成帶壓堵漏作業。為了滿足以上工作要求,完成上述工作流程,本論文將開展帶壓堵漏裝置盒和抱緊機構設計。
2 帶壓堵漏裝置盒和抱緊機構設計
2.1 帶壓堵漏裝置盒設計
帶壓堵漏裝置盒如圖2所示,在工作時需要將堵漏盒固定在抱緊裝置中的零件上,并且在堵漏工作開始后可以將除了堵漏盒以外的其他裝置卸下。讓堵漏盒可以長時間附在管道上,需要堵漏盒與法蘭采用銷釘配合。在執行末端系統機械臂向上提供壓力時,銷釘會受到法蘭和堵漏盒的剪切力,使銷釘在堵漏盒與法蘭接觸的界面發生斷裂。此時,堵漏盒與其他部分分開,完成了工作前的固定和工作后的分離。
2.2 帶壓堵漏裝置抱緊機構設計
抱緊裝置作為機械機構的重點,也是能否完成堵漏工作的關鍵。設計的工作范圍可以滿足直徑
1 000 mm管道,而且不會因為管道外形的曲率不同而使其無法抱緊。在室外可以長時間抱緊管道而不脫落,能應對惡劣天氣,可靠性強。為了能夠緊固堵漏盒,要求抱緊裝置不僅能夠在水平方向夾緊管道,也要求其在垂直方向上有一定的壓力,初步設定為30 kPa。并且為了防止因自重過大,使夾緊效果受到影響,選擇合適的材料,既能夠滿足剛度要求又保證輕量化設計。
因此本文選擇通過形狀記憶合金彈簧的變形拉動連桿帶動機架和四桿機構,使整個抱緊裝置向上提,進而抱緊管道,讓堵漏盒與管道結合,金屬修補劑在抱緊裝置力的作用下可與管道漏點充分接觸可以形成堵漏。
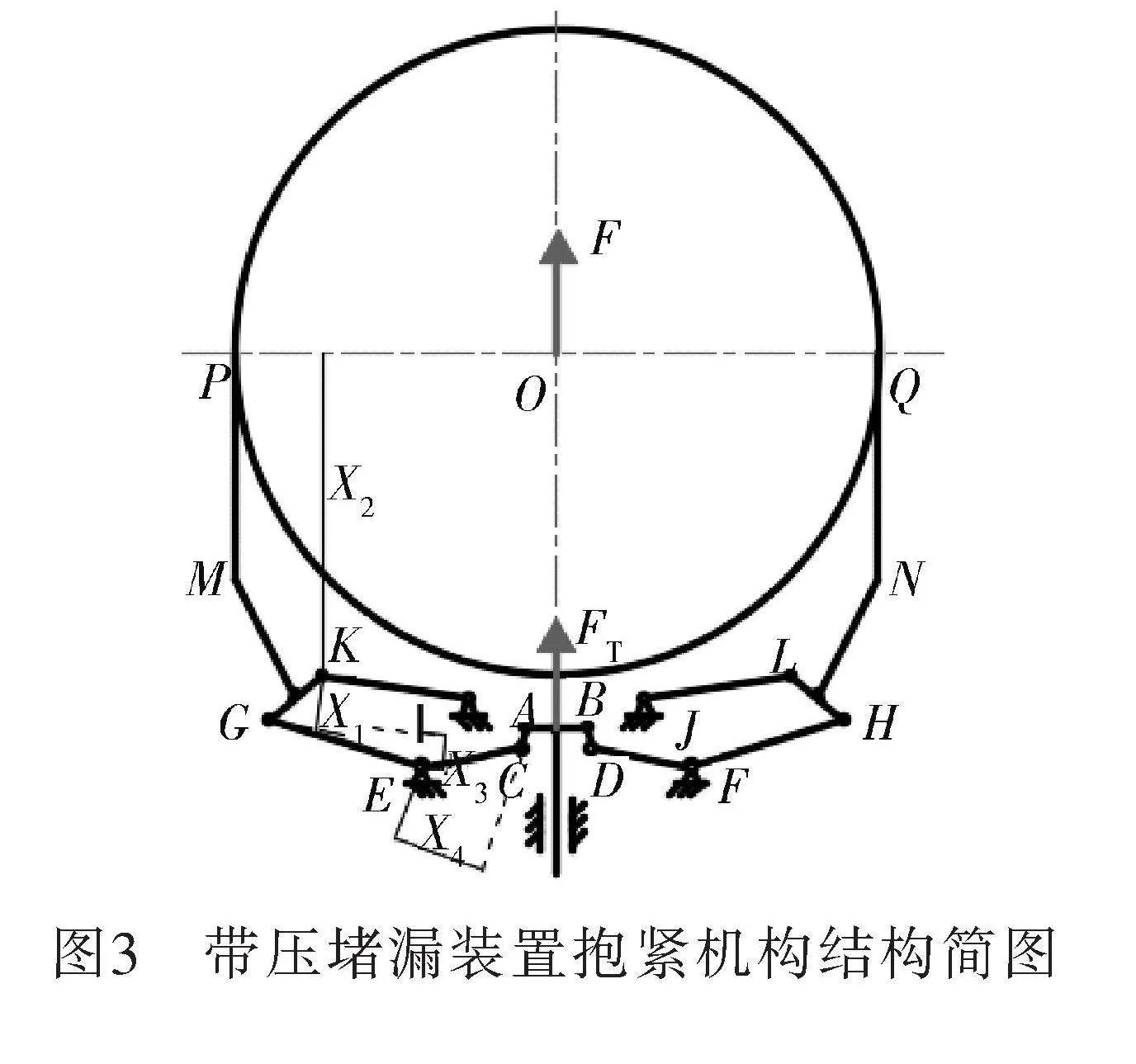
設計的抱緊機構為平面四邊形機構,如圖3所示。
以彈簧為主動件可以將彈簧的直線運動轉化為夾具的旋轉運動,機構中共有9個構件,13個平面低副,且沒有高副的存在。
帶壓堵漏裝置抱緊機構自由度計算式為:
N=3n-2PL-PH=3×9-2×13=1(1)
式中:N為裝置的自由度個數;n為裝置的構件個數;PL為裝置的低副個數;PH裝置的高副個數。
由計算可知該機構自由度為1,且等于原動件個數(只有一個彈簧作為原動件),即滿足自由度大于零,且自由度等于原動件個數的條件,因此,該機構有確定的運動。
假設兩組抱緊裝置受力狀況相同,一組抱緊裝置與管道之間的受力分析示意圖如圖4~5所示。
桿KI受力分析圖6所示,當抱緊夾具夾緊時,將管道受到力簡化為正壓力,因為機構呈對稱機構,故夾具兩端受到摩擦力F1=F2,則管道在空中的受力方程可以表現為:
G=2(F+F1+F2)"""""""""""" (2)
F1=(3)
式中:G為抱緊裝置的總重力,N;F為末端執行機構機械臂的向上推力,N;F1、F2為夾緊狀態下管道受到夾具的摩擦力,N。
圖6 桿KI受力分析示意圖
因為抱緊機構成對稱機構,因此對其局部構件進行分析。對桿KI進行受力分析得:
FK=FI(4)
式中:FK為工作狀態下桿KI上點K處所受的力,N;FI為工作狀態下桿KI上點I處所受的力,N。根據力的相互作用原則,可得FP=FN1。夾具與管道的摩擦因數為μ,則夾具所受到管道的作用力FP為:
FP=F1/μ=(5)
由于桿KI是二力桿,故FK與FI大小相等、方向相反。此時FP的大小方向均已知可求,FK′的方向可求,為獲得桿GEC上點G處受力情況,還需獲知點G的受力方向。根據三力平衡匯交定理:當物體受到同平面內不平行的三力作用而平衡時,三力的作用線必匯交于一點。即物體在互相不平行的三個力作用下處于平衡狀態時,這三個力必定共面共點,合力為零。故FG方向亦已知,交于FP和FK的交點Q,如圖7所示。
在桿PKG上對點K進行力矩分析,得:
MK(FG)=FGx1(6)
MK(FP)=-FPx2(7)
MK=MK(FG)+MK(FP)=0(8)
式中:FG為工作狀態下桿GE在點G的作用力,N;FP為工作狀態下管道對點P的作用力,N;x1為工作狀態下點K到FG所在直線方向垂直距離,m;x2為工作狀態下點K到管道圓心水平線垂直距離,m;MK(FG)為工作狀態下桿GE對點G的作用力FG對K點的矩,N·m;MK(FP)為工作狀態下管道對點P的作用力FP對K點的力矩,N·m。其中FG與FG′為不同構件上的同一點,所以兩力大小相同,通過角標區別兩力,后文不再贅述。由式(6)~(8)可知:
FG=FG′(9)
FG==(10)
圖8為桿GEC受力分析示意圖,經計算后FG′的大小方向均已知可求,FC的方向可求,為獲得桿CA上點C處受力情況,此時對桿GEC上點E取距,無需知道點E處受力情況。
在桿GEC上對點E進行力矩分析,可得:
ME(FG′)=FG′x3(11)
ME(FG′)=FG′x3(12)
ME=ME(FG′)+ME(FC)=0(13)
式中:FG′為工作狀態下桿PKG點G的作用力,N;FC為工作狀態下桿AC對點C的作用力,N;x3為工作狀態下點FG′所在直線方向垂直距離,m;x4為工作狀態下點E到FC所在直線方向垂直距離,m;ME(FG′)為工作狀態下桿PKG對點G所受的作用力FG′對E點的力矩,N·m;MK(FP)為工作狀態下桿AC對點C的作用力FC對E點的力矩,N·m。
由式(11)~(13)可知:
FC′==(14)
桿CA受力分析如圖9所示,對桿CA進行受力分析可得:
FC′=FA(15)
式中:FC′為工作狀態下桿GEC對點C作用力,N;FA為工作狀態下桿AB上點A作用力,N。
桿AB受力分析示意圖如圖10所示,因為機構左右對稱,所以FA′=FB為保證機構的運動穩定性對FT增加安全系數S,再對桿AB進行受力分析可得:
"""""""""""" FT=(FA′+FB)cosα(16)
式中:FT為工作狀態下彈簧對桿AB的力,N;FA′為工作狀態下桿AC對點A的作用力,N;FB為工作狀態下桿BD對點B的作用力,N;α為工作狀態下桿AC與豎直方向角度。
取安全系數S=1.5,并由式(3)、(5)、(10)、(14)~(16)可推導FT的數學表達式為:
FC=FA′=FA=FB(17)
FT=2SFA′=(18)
由于抱緊裝置中夾具和管道之間的接觸材料是橡膠和鋼材,因此μ取0.8。根據抱緊裝置的尺寸設計、管道直徑,初步確定當抱緊裝置抱緊時各尺寸和角度為:
x1=30 mm;x2=527 mm;x3=79 mm;
x4=135 mm;α=6.4°"""""" (19)
通過三維建模可知模型體積為0.019 m3,一般構件材料選擇鋁合金,部分選擇普通碳鋼,故抱緊裝置和堵漏盒總質量為47.593 kg,則抱緊裝置所受重力為:
G=mg=47.593×9.8=466.41 N(20)
式中:G為抱緊裝置的總重力,N;m為抱緊裝置和堵漏盒的總質量,kg;g為重力加速度,取9.8 m/s2。帶入式(18)可得:
FT=445.9-19.14F(21)
3 帶壓堵漏抱緊裝置模型建立與仿真分析
3.1 帶壓堵漏抱緊裝置模型建立
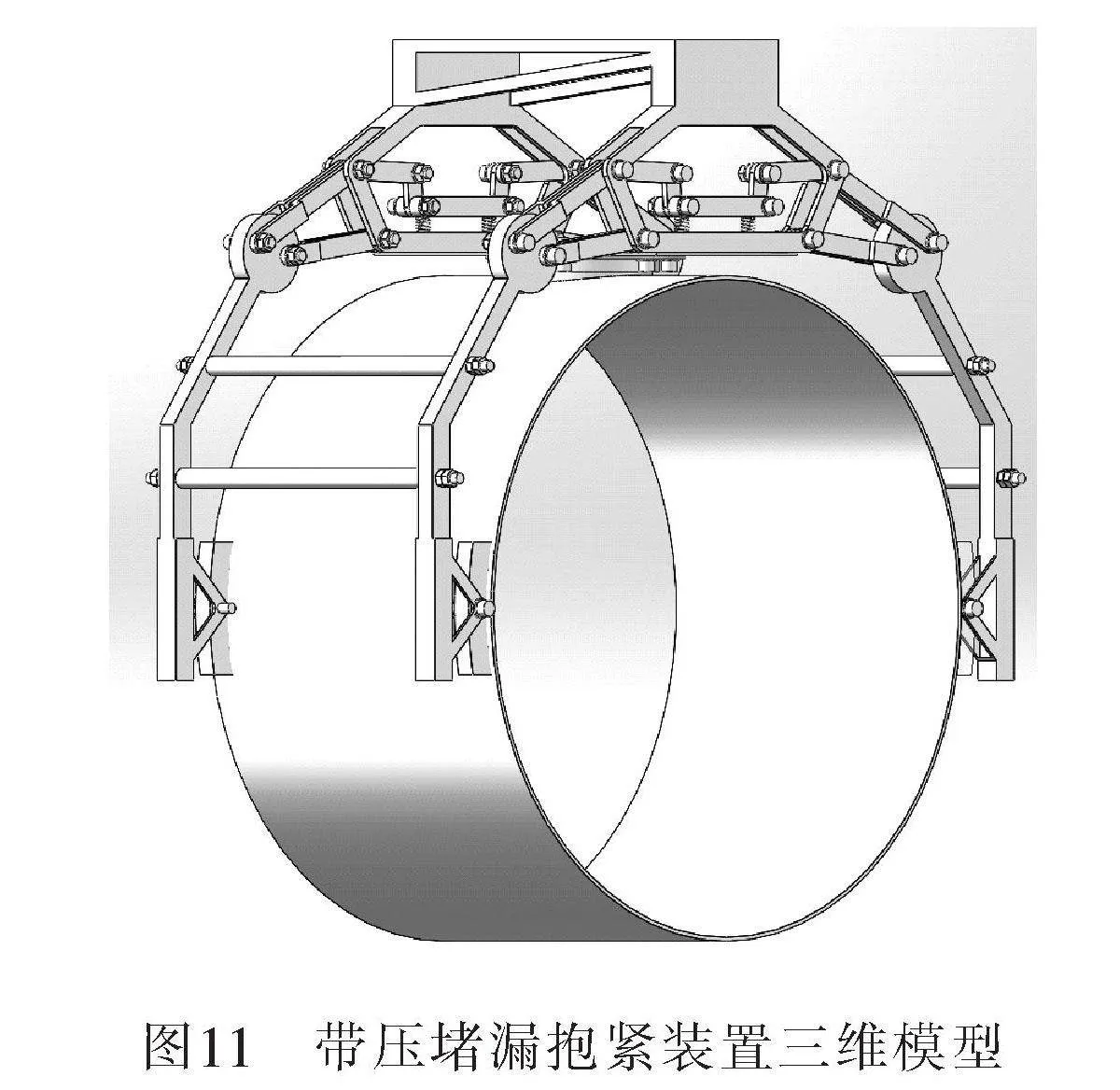
抱緊裝置的零件由機架、連桿和夾具等幾部分組成。機架的總長為600 mm,最寬處尺寸為510 mm;原動件連桿長210 mm,寬為50 mm,連桿兩孔之間距離為180 mm;夾具長650 mm,寬40 mm;堵漏盒法蘭外直徑400 mm,內直徑200 mm,高25 mm。使用SolidWorks建立好的模型如圖11所示。
3.2 帶壓堵漏抱緊裝置有限元仿真
3.2.1 靜力學仿真分析
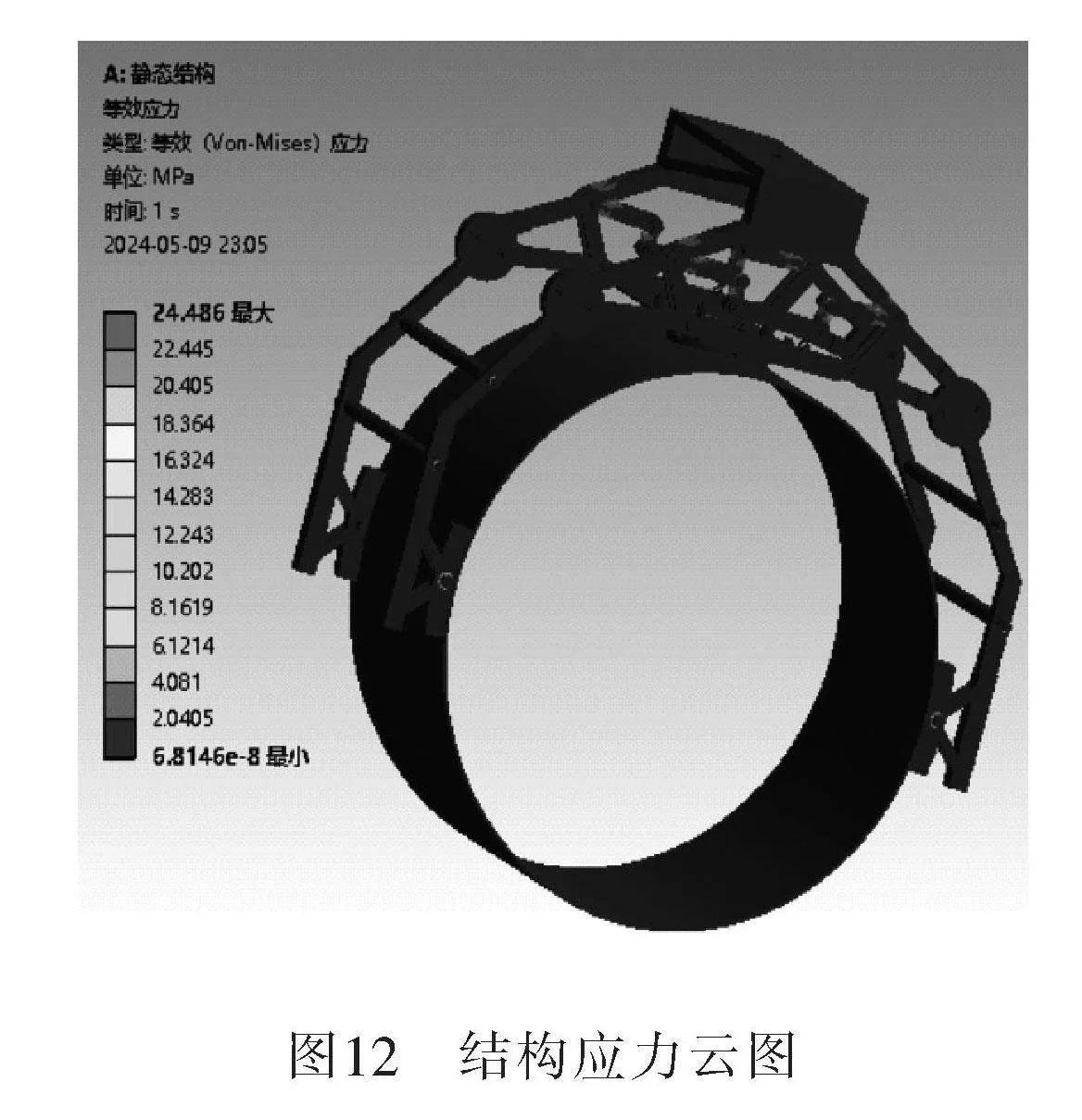
本研究進行有限元分析之前,首先要建立Ansys軟件的三維模型,將在三維軟件中建立三維模型導入軟件,再進行相關的仿真操作。在仿真參數設置中,結構鋼的密度為7 850 kg/m3,彈性模量為2×105 MPa,剪切模量為76 923 MPa,泊松比為0.3;鋁合金為2 770 kg/m3,彈性模量為71 000 MPa,剪切模量為26 692 MPa,泊松比為0.33。對帶壓堵漏抱緊裝置有限元仿真有限元靜力學的分析,可以得到帶壓堵漏抱緊裝置相關的等效應力、應變和總形變分布云圖,如圖12~14所示。
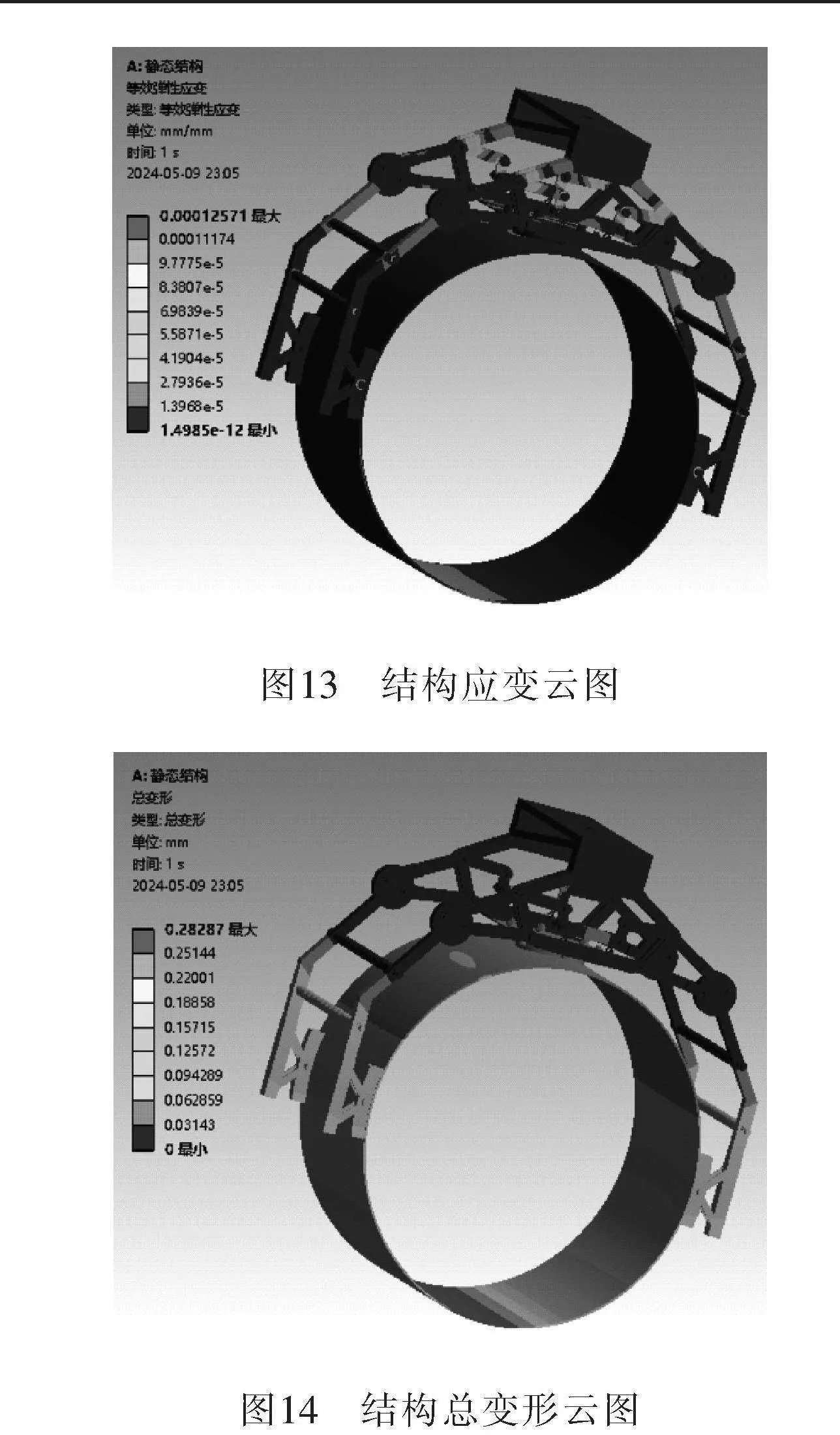
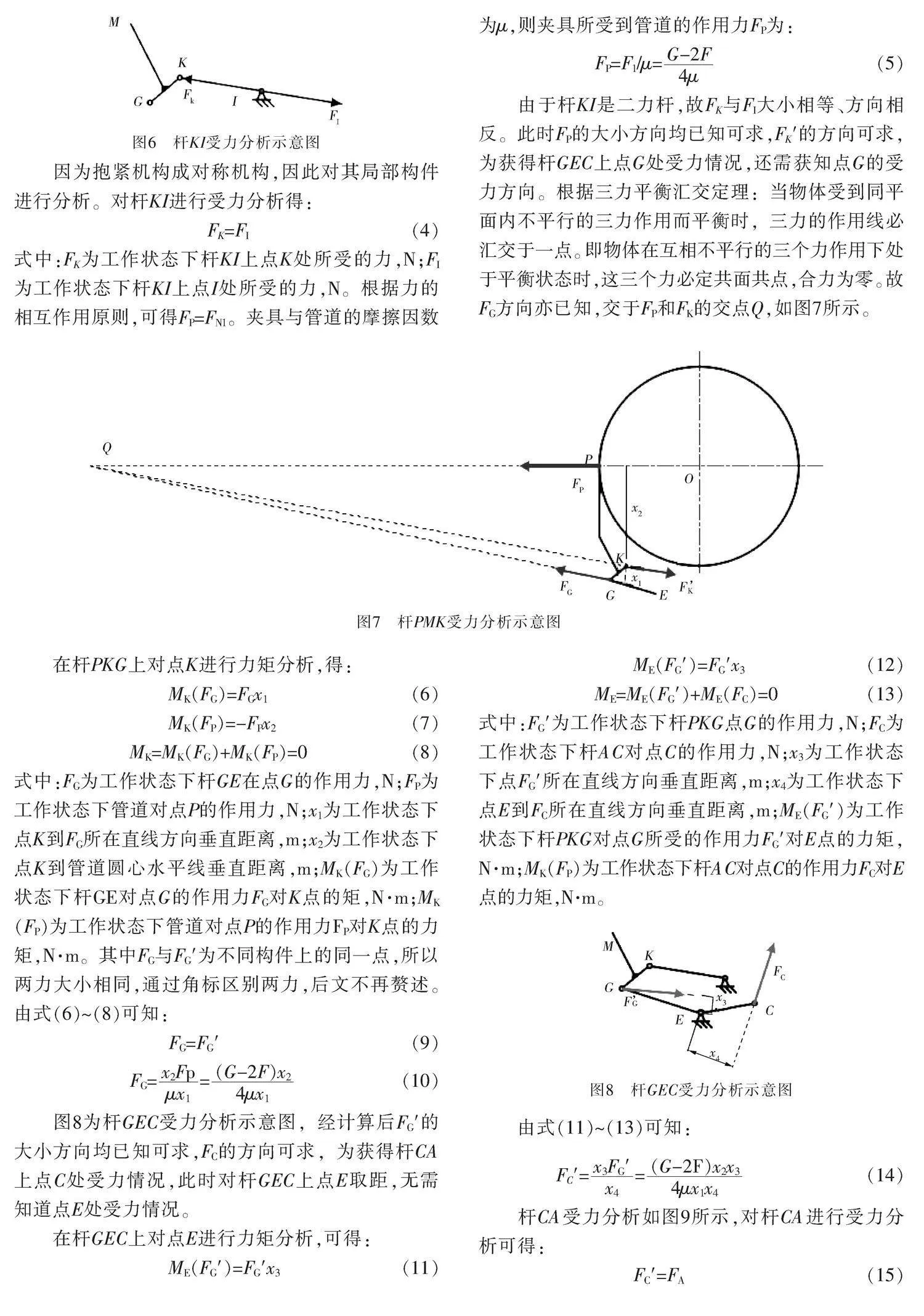
由圖12可知抱緊裝置所受的最大等效應力為24.486 MPa,出現在與管道相接觸的夾具螺栓處,小于結構鋼的許用應力,滿足結構的強度要求。由圖13可知,在加緊過程完成后,抱緊裝置所受的最大等效應變為1.25×10-4 mm/mm,出現在夾具下側長螺栓處,其變化大小在實際狀況下影響小,在材料所允許的范圍內。圖14顯示抱緊裝置所受的最大變形為0.282 87 mm,出現在圓形管上距離裝置最遠端處的直線上,從數值大小來看,最大變形處的變形不影響實際管道的使用,抱緊裝置的修補過程不會對管道有損壞的作用,證明了抱緊裝置的可行性,符合使用要求。
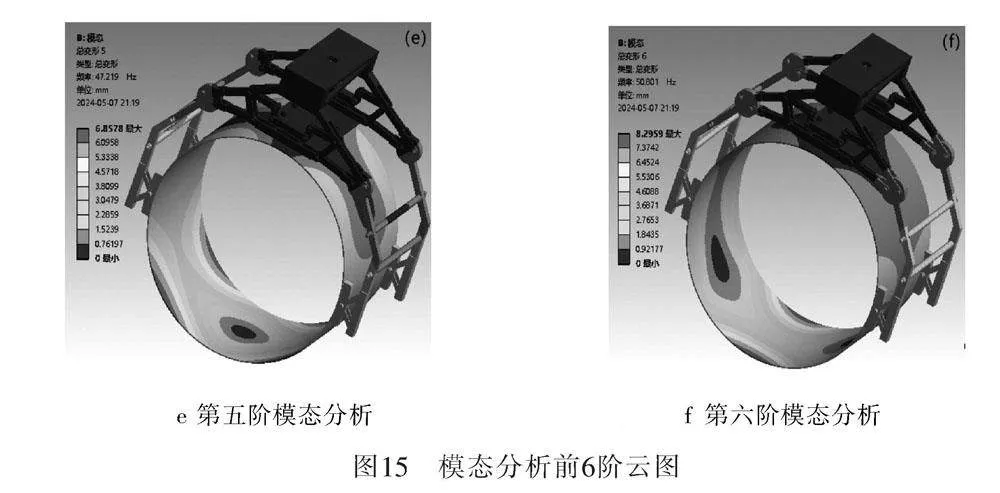
3.2.2 模態仿真分析
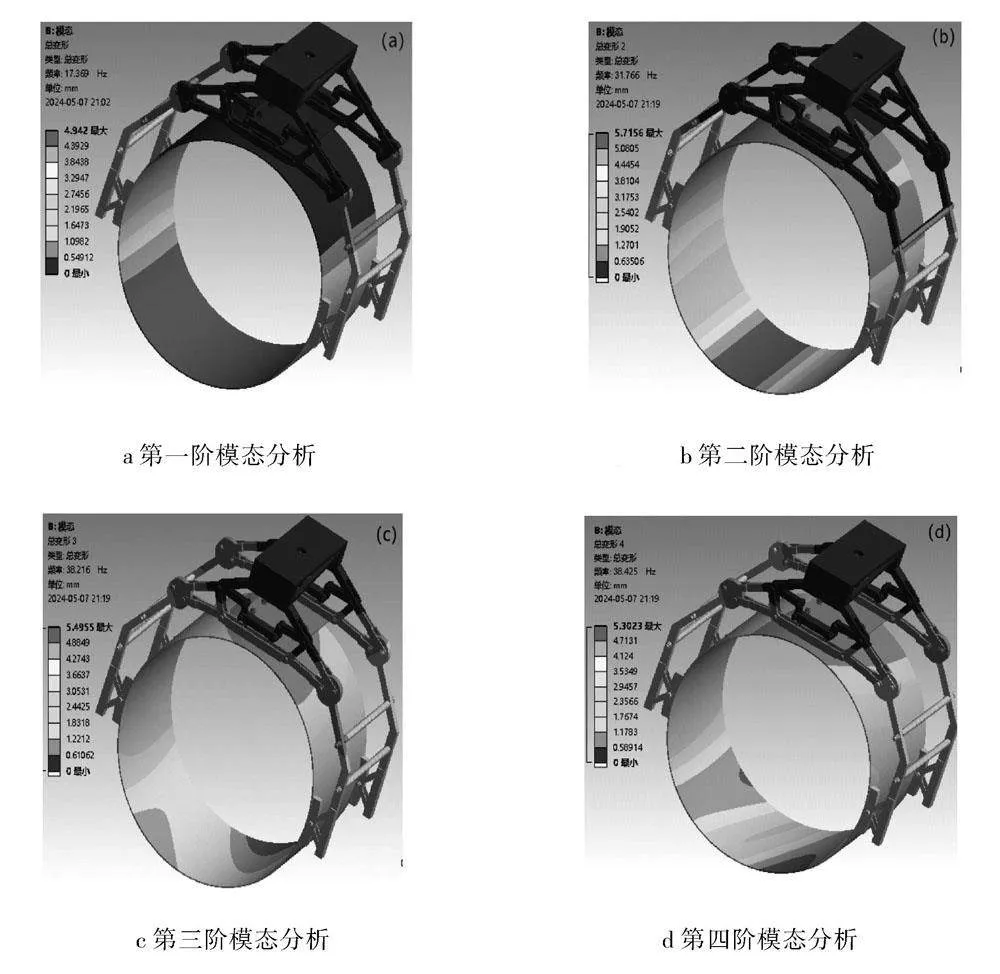
任何物體都有本身的固有頻率,模態是機械自身的振動特性,模態分析可以了解機構的特征頻率,避免與機構在特定某段頻率發生共振或者造成損傷。在工程應用中,一般只有前幾次的固有頻率對機構有較大影響,可能會引起機械共振,高階的固有頻率影響很小。故本文主要分析前6次振型對機構的影響,并對抱緊裝置所產生的形變進行分析,得到抱緊裝置固有頻率和最大位移的模態振型,如圖15所示。
由圖15的模態振型可知,抱緊裝置的前6階模態頻率介于17.37~50.8 Hz之間,管道的圓弧頂部處形變較大,容易發生變形,夾具與管道的接觸面形變也相對較大,上述部分可以通過改進材料或者進行布局加厚來減小變形。
在實際工況下,管道表面并非理想曲面,表面的不平整性會因為振動對抱緊裝置有一定的沖擊。當抱緊裝置夾緊管道后,抱緊裝置的夾具和堵漏盒與管道的接觸面存在一定的變化時,管道受到的反作用力也在不斷的變化,振動頻率也在不斷地變化。根據振動穩定性準則,為了保證抱緊裝置的穩定性,將抱緊裝置的固有頻率與振源的頻率錯開,可以大大降低共振的危害,需要滿足的條件為:
0.85f≥fp或1.15f≤fp(22)
式中:f為零件的固有頻率,Hz;fp為振動源頻率,Hz。
對抱緊裝置進行模態分析是為了避開共振,共振會使機構發生變形,極大地降低結構的使用壽命和穩定性,可以通過更換材料來改變機構的頻率來避開共振。通過上述模態分析和計算可知,可以讓振動源的頻率大于58.42 Hz或者小于15.10Hz來避開零件的固有頻率段。
4 結論
1) 提出了帶壓堵漏機器人的整體方案,明確其技術指標。重點對抱緊裝置機構的類型進行分析和選擇,從抱緊裝置的靜力學方案的角度進行計算,計算裝置結構簡圖的自由度,對抱緊裝置進行受力分析。
2) 使用SolidWorks軟件對抱緊裝置進行了三維建模,得到了抱緊裝置的三維模型,對部分零件的參數進行分析。
3) 使用Ansys對抱緊裝置進行有限元模型的建立,在靜態結構方面,對抱緊裝置進行應力、應變、總形變方面的分析,得到了對應的云圖和參數;在動力學方面,對抱緊裝置進行模態分析,得到了抱緊裝置的固有頻率,可以避免裝置共振的影響。
參考文獻:
[1] 吳明畏,張偉,劉進余,等.可膨脹波紋管堵漏技術應用[J].石油礦場機械,2013,42(11):72-75.
[2] 林衛.煉油化工設備的帶壓堵漏技術研究[J].中國設備工程,2024(9):208-210.
[3] 包檢青,王其營,袁超偉.帶壓堵漏技術在輪胎生產企業的應用[J].橡塑技術與裝備,2023,49(2):49-55.
[4] 高衛星.天然氣管道帶壓堵漏搶修技術的研究[J].石化技術,2022,29(9):223-225.
[5] 戴華柱.煉油化工設備的帶壓堵漏技術探析[J].現代工業經濟和信息化,2022,12(7):277-279.
[6] 陳喜昆.非金屬管道帶壓堵漏技術分析[J].全面腐蝕控制,2022,36(7):96-97+140.
[7] Viola H L,Vishwa V,Washington K,et al.Liquid plug propagation in computer-controlled microfluidic airway-on-a-chip with semi-circular microchannels[J].Lab on a chip, 2024, 24(2):197-209.
[8] Wang J , Song Y , Fan Y ,et al.Reduced Pressure Effect on Smoke Layer Plug-Holing Behavior of Tunnel Fires with a Naturally Ventilated Vertical Shaft[J].Fire technology, 2024(2):60.
[9] Yang Z,Liu J,Li X,et al.Elastoplastic damage analysis and structural optimization of soluble bridge plug based on phase field method[J].Mechanics of materials, 2024(2):189.
[10] Momin M,Rahmani F,Makki E,et al.The impact of 180° return bend inclination on pressure drop characteristics and phase distribution during oil-water flow[J].Heliyon, 2024(10):1-19.
[11] 呂拴錄,騰學清,胥志雄,等.某井固井試壓套管柱密封失效原因分析[J].石油礦場機械,2014(12):51-55
[12] 張曉丹,楊進,魏倩.海上水平井找漏堵漏工藝研究[J].石油礦場機械,2012,41(7):92-94.
[13] 陳力.輸油管道帶壓堵漏技術的運用之研究[J].中國化工貿易,2022(32):97-99
[14] 焦建俊,李通,武文斌,等.基于S7-200SMART的熱力管道在線堵漏機器人控制系統設計[J].科技創新與應用,2023,13(8):96-99.
[15] 苗興園,趙弘.油汽管道封堵機器人封堵過程的振動預測[J].振動與沖擊,2023,42(13):36-49.
(編輯:韓睿超)