一種艇載反無人系統發控單元設計
2025-02-09 00:00:00李二磊張發枝
指揮控制與仿真 2025年1期



摘 要:針對無人裝備,設計了艇載反無人系統發控單元,包含70 mm、40 mm便攜式防空單元和反裝甲單元,借助艇載探測設備,能夠對5 000 m以下空域中小型無人機、無人直升機、自殺式無人艇等進行有效威懾與打擊。共配備了11個發射控制接口,能夠對常規無人裝備進行多批次打擊,護航基地、港口和海上高價值目標。發控單元采用ARM+FPGA主從控制結構,充分發揮了兩種不同芯片的優點,并在硬件電路中對發射流程的硬件執行順序進行了創新性設計,在嚴格按照發射流程順序執行的同時,能夠確保不因元器件損壞而造成誤擊發,進一步確保了系統的安全性和可靠性。
關鍵詞:艇載;ARM+FPGA;反無人系統;電路執行順序;安全性與可靠性
中圖分類號:U674.77 文獻標志碼:A DOI:10.3969/j.issn.1673-3819.2025.01.005
Design of a launch and control unit for anti-unmanned system on a boat
LI Erlei, ZHANG Fazhi
(Jiangsu Automation Research Institute, Lianyungang 222061,China)
Abstract:The boat based on anti-unmanned system launch and control designed in this article integrates 70 mm unit, 40 mm unit and anti-armor unit. With the help of detection equipment, it can effectively deter and strike small and medium-sized UAVs, unmanned helicopters, suicide USVs, etc. in the airspace below 5 000 meters. The control unit adopts ARM+FPGA master-slave control structure, which fully plays the advantages of two different chips, and innovatively designs the hardware execution sequence of the launch process in the hardware circuit. While executing in strict accordance with the launch process sequence, it can ensure that no misfiring is caused by damage to any component, further ensuring the safety and reliability of the system.
Key words:boat-borne; ARM+FPGA; anti-unmanned system; circuit execution sequence; safety and reliability
近年來發生的多場地區沖突與局部戰爭中,無人裝備的實戰化程度不斷提升,其在智能化戰場中逐漸展現出不容小覷的作戰實力[1]。俄烏沖突中,俄羅斯塞瓦斯托波爾港、黑海艦隊、克里米亞大橋陸續遭到烏克蘭海軍無人艇襲擊,俄羅斯也使用無人艇攻擊了敖德薩的扎多卡鐵路橋[2]。目前,世界各國都在尋求發展反無人系統作戰技術,以形成對無人作戰屬性相克、跨域制衡的非對稱作戰能力[3]。
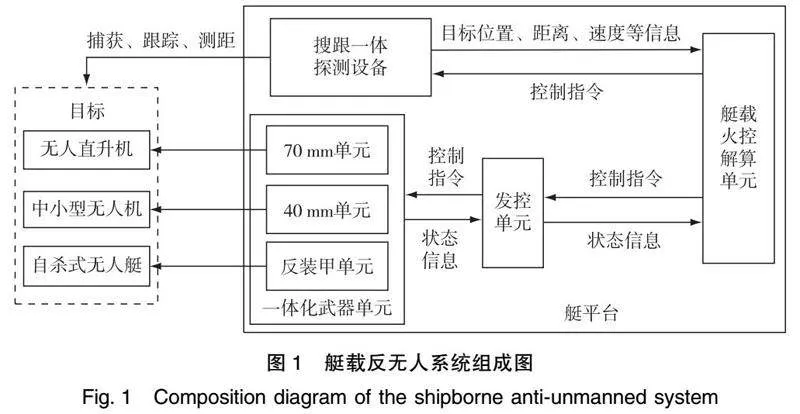
反無人系統作戰技術中,為了讓敵方無人情報偵察機徹底癱瘓,最有效、直接的措施是使用打擊毀傷類反制技術,徹底摧毀敵無人情報偵察機存儲的情報信息[4]。目前,國內外反無人系統打擊毀傷類技術多見于陸基或車載系統,對沿海軍事基地、港口的向海縱深防御能力不足[5-7]。針對海上特殊環境,有人/無人艇平臺具有機動性強、速度快、搭載載荷能力突出的特點,且在向海縱深防御方面具有先天優勢,非常適合作為重要軍事基地、港口以及演習區域的反無人系統搭載平臺[8]。本文針對敵方無人機、自殺式無人艇的特點,設計了一種集某型40 mm、70 mm便攜式防空導彈以及某型反裝甲導彈發射與控制于一體的艇載反無人系統發控單元,能夠同時反制小型、中型無人機、無人直升機和自殺式無人艇,該發控單元采用ARM+FPGA主從控制結構,并在硬件電路中對發射流程的硬件執行順序進行了創新性設計,能夠確保不因元器件損壞而造成導彈誤擊發,保證了系統的安全性。本文設計的艇載反無人系統組成如圖1所示。
1 發控單元總體結構設計
發控單元對外通過以太網接口接收上層計算機控制指令,并反饋相應狀態信息,接收外部時統信號作為觸發時鐘,確保系統信息保持同步[8-9]。發控單元內部主要包括供電單元、ARM+FPGA主控單元、70 mm控制單元、40 mm控制單元、反裝甲單元、環境溫度監測單元,如圖2所示。
2 發控單元內部單元模塊設計
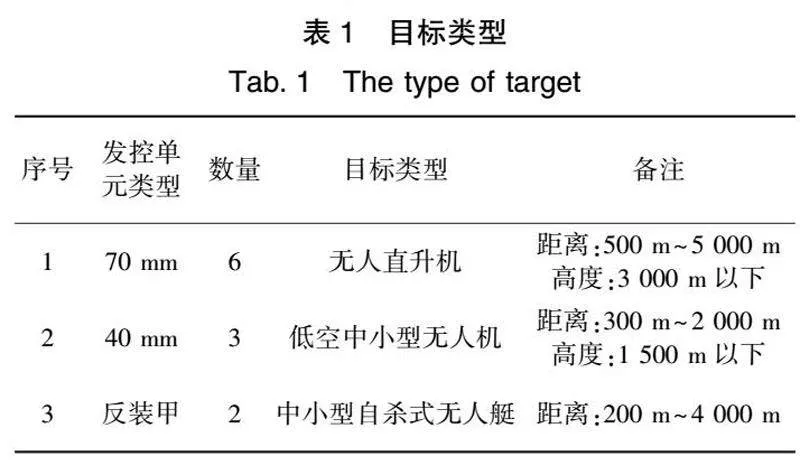
本文所設計的發控單元主要包括ARM+FPGA主控單元、70 mm控制單元、40 mm控制單元、反裝甲控制單元等,除了主控單元外,還包含6單元70 mm、3單元40 mm和2單元反裝甲導彈的發射控制,所針對的目標類型如表1所示。
2.1 ARM+FPGA主控單元
本文采用ARM+FPGA形式的主從控制架構,如圖3所示,其中ARM為主控制芯片,FPGA為從控制芯片,充分發揮兩者的優勢,通過ARM自帶的網絡接口與上層控制計算機通信[10],通過UART0-UART2接口與40 mm單元進行信息交互,通過UART3接口與反裝甲單元進行信息交互,通過CAN通信接口與70 mm單元進行通信,并利用ARM串行控制機制,分別對70 mm單元、40 mm單元和反裝甲單元的發射流程的各種模擬量進行控制[11];通過FPGA并行處理機制,分別對70 mm單元中各種頻率檢測任務進行處理,具體包括捕獲頻率檢測、角位移頻率檢測,并對起轉線圈輸出電路進行控制;ARM與FPGA之間通過地址線和數據線進行數據傳輸,發送控制指令并返回狀態信息。在熱電池激活、點火等關鍵電路控制中,采用ARM+FPGA冗余控制的方式,確保電路的安全和可靠。
2.2 70 mm控制單元
70 mm單元主要針對無人直升機類目標,負責對某型70 mm導彈進行發射控制,根據主控單元的控制指令,執行供電供氣、起轉線圈加電、頻率檢測、解鎖、電池激活、電源轉換、氣源轉換、點火等操作,在70 mm導彈發控過程中,應嚴格按照規定流程順序執行,發控單元執行點火程序時,不僅僅依賴按鍵指令,還應當判斷已解鎖且發控單元在熱電池激活、氣源激活、電源轉換已按順序執行完畢,才允許執行點火動作。70 mm導彈發控流程如圖4所示。
本文設計的70 mm導彈發射電路,除通過軟件判斷外,還在硬件設計上保證點火程序各個動作的執行順序,不因軟件指令錯誤或個別硬件失效導致導彈誤點火。如圖5所示,當接收到執行點火指令后,熱電池控制信號UDC_IO由高變低,熱電池激活信號由接地狀態轉變為+20 V,XQ_5V接通+20 V;DD_JD_IO同時有效時,電源轉換才能完成,即完成三組電源從有到無的轉換;此時K4的1腳為+20 V,當UB1_IO同時有效時,開氣指令由接地轉變為接+20 V,同時使得K3的1腳連接+20 V;此時當點火控制信號FIR_SGN_IO有效時,點火信號FIR_SGN和點火地信號FIR_SGN_GND同時有效,此時點火信號有效,中間任一信號不滿足要求都會造成點火失敗,從而確保電路的安全和可靠。
2.3 40 mm控制單元
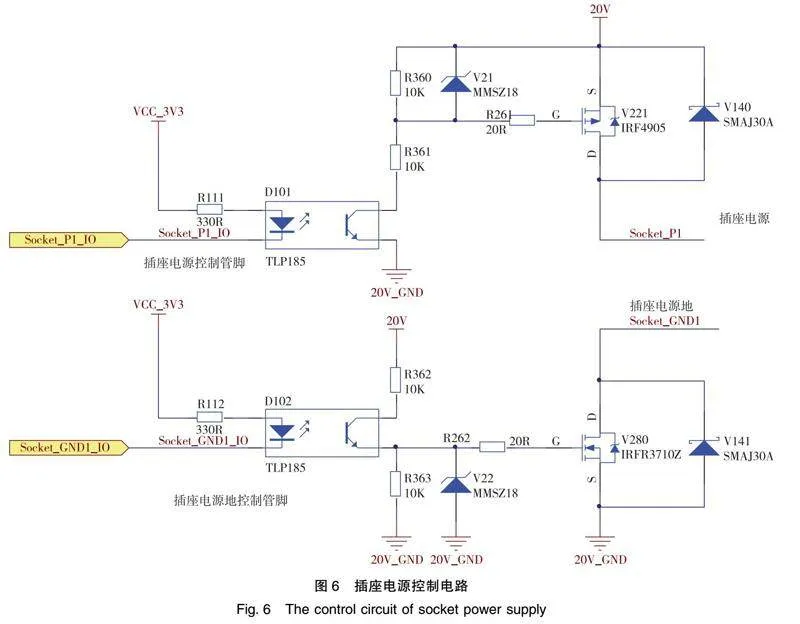
40 mm單元主要針對低空中小型無人機類目標,負責對某型40 mm導彈進行發射控制,根據主控單元的控制指令,與導彈端進行1路RS422串口通信,一路PAL制式視頻、安保信號、分離信號、開機信號、電池電壓檢測、插座電源等模擬信號的檢測與控制。在本文設計的發控單元中,應嚴格按照規定流程順序執行,對于不符合發控流程的指令或不滿足發射條件的導彈發射指令,發控單元均應當對其屏蔽,拒絕發送指令或拒絕執行。其中,插座電源控制電路如圖6所示。
2.4 反裝甲控制單元
反裝甲單元主要針對中小型自殺式無人艇類目標,負責對某型反裝甲導彈進行發射控制,根據主控單元的控制指令,與反裝甲導彈端通過1路RS422串口進行通信。反裝甲導彈端擁有自帶的發控單元,在本單元的設計中只需將上層控制計算機的控制指令依照相關協議通過RS422串口發送至導彈端發控單元即可,另外需要將PAL制式差分視頻轉換為單端視頻送入導彈端,如圖7所示。
3 發控單元樣機及試驗情況
發控單元樣機如圖8所示,尺寸為260*270*260(長*高*深,單位mm),其中,X1—X6為70 mm單元控制接口,X8—X10為40 mm單元控制接口,X11為兩路反裝甲單元控制接口,KG為開蓋模塊接口。
目前,該發控單元已在碼頭靜止環境下進行了兩次70 mm單元和一次反裝甲單元反無人系統試驗,均命中目標,下一步將開展有人/無人艇載機動環境下對
海上無人系統目標的試驗驗證,進一步提升海上反無人系統的能力。
4 結束語
本文設計的艇載反無人系統發控單元充分發揮了ARM和FPGA芯片的優勢,在發射流程控制電路的執行順序上進行了創新性設計,具有非常好的安全性和可靠性。此外,該發控單元還具備對無人機、無人艇等目標同時、多批次打擊的能力,是重要基地、港口、貨船等高價值目標護航任務的優質選擇。
參考文獻:
[1]
周末, 孫海文, 王亮, 等. 國外反無人機蜂群作戰研究[J]. 指揮控制與仿真, 2023, 45(2): 24-30.ZHOU M, SUN H W, WANG L, et al. Research on foreign anti-UAV swarm warfare[J]. Command Control & Simulation, 2023, 45(2): 24-30.
[2] 吳大輝. 烏克蘭危機與新軍事革命:無人艇篇[J]. 世界知識, 2023(15): 72-73.WU D H. "Ukrainian crisis and the new military revolution: unmanned boats[J]. World Affairs, 2023(15): 72-73.
[3] 王澤坤. 反無人機指控系統的設計與仿真評估研究[D]. 西安: 西安電子科技大學, 2021.WANG Z K. Design and simulation evaluation of anti-UAV command system[D]. Xian: Xidian University, 2021.
[4] 王祥科,沈林成,李杰,等.無人機集群控制理論與方法[M].上海:上海交通大學出版社,2021. WANG X K, SHEN L C, LI J, et al. Theory and methods of drone cluster control[M]. Shanghai: Shanghai Jiao Tong University Press, 2021.
[5] 趙晨晨, 歐宗偉, 徐磊, 等. 無人機集群作戰威脅及反無人機集群對策研究[C]//第十一屆中國指揮控制大會論文集, 北京, 2023: 138-141. ZHAO C C, OU Z W, XU L, et al. Research on the threats of unmanned aerial vehicle cluster operations and countermeasures against unmanned aerial vehicle clusters[C]//Proceedings of the 11th China Command and Control Conference, Beijing, 2023: 138-141.
[6] 孫昭, 何廣軍, 李廣劍. 美軍反無人機技術研究[J]. 飛航導彈, 2021(11): 12-18.SUN Z, HE G J, LI G J. Research on US armys anti-UAV technology[J]. Aerodynamic Missile Journal, 2021(11): 12-18.
[7] 凌海風, 李瑞, 柏林元, 等. 俄羅斯反無人機裝備發展現狀及啟示[J]. 國防科技, 2023, 44(3): 81-87, 141. LING H F, LI R, BAI L Y, et al. Current developments and implications of Russian anti-UAV equipment[J]. National Defense Technology, 2023, 44(3): 81-87, 141.
[8] 劉正鋒, 張隆輝, 魏納新, 等. 限制區域水面無人艇路徑規劃與跟蹤控制研究[J]. 船舶力學, 2021, 25(9): 1 127-1 136. LIU Z F, ZHANG L H, WEI N X, et al. Study on path planning and following control of unmanned surface vehicles in restricted areas[J]. Journal of Ship Mechanics, 2021, 25(9): 1 127-1 136.
[9] 萬楊, 姜楠. 飛行器綜合控制軟件發射控制架構設計[J]. 工業儀表與自動化裝置, 2020(2): 78-80, 127. WAN Y, JIANG N. Design of launch control architecture for aircraft integrated control software[J]. Industrial Instrumentation & Automation, 2020(2): 78-80, 127.
[10]冷月香, 馬遠超, 呂慧, 等. 小型無人機地面式發射控制系統設計[J]. 計算機測量與控制, 2019, 27(10): 125-128. LENG Y X, MA Y C, LYU H, et al. Design of ground-based launch control system for miniaturized UAV[J]. Computer Measurement & Control, 2019, 27(10): 125-128.
[11]段杰, 張帥, 王志德, 等. 基于通用化平臺的混裝發射控制技術研究[J]. 儀器儀表用戶, 2020, 27(6): 14-16, 50. DUAN J, ZHANG S, WANG Z D, et al. Researches on mix-load launch control technology based on universal platform[J]. Instrumentation, 2020, 27(6): 14-16, 50.
(責任編輯:張培培)