一種基于UWB技術的室內定位系統
2025-02-05 00:00:00江元慶陳平平
物聯網技術 2025年3期

摘 要:針對室內物品監管中存在監控盲區、成本高昂等問題,提出一種基于UWB技術的室內定位系統,通過對室內物品進行實時監控來防止丟失。該系統采用STM32作為主控制器,集成了UWB模塊來采集標簽位置數據并加以分析,以實現精確的室內定位功能。系統配置了3個從基站及1個主基站,主基站通過遠傳模塊,將標簽位置數據上傳至服務器,終端通過訪問服務器來查詢標簽的實時位置。一旦標簽超出預設的范圍,服務器會立即向終端發出警報,從而達到防丟的目的。對系統進行測試實驗,實驗結果表明:系統靈敏度高、穩定性強,能夠有效實現室內物品的定位與防丟功能,具有較高的實際應用價值。
關鍵詞:室內定位;UWB技術;STM32;TDOA算法;OneNET云平臺;標簽識別
中圖分類號:TP277;TU998.1 文獻標識碼:A 文章編號:2095-1302(2025)03-00-03
0 引 言
當下,人們的生活正經歷著翻天覆地的變化,對高速率、高質量的無線通信技術的需求日益迫切。隨著通信技術、因特網以及多媒體業務的飛速發展,眾多無線技術,例如ZigBee、WiFi、藍牙及超寬帶(UWB)等,已在智能家居、智慧園區、智能樓宇等日常生活的各個方面得到了廣泛應用,為無線定位技術的發展提供了更為廣闊的舞臺。 UWB技術起源于20世紀60年代,起初主要應用于軍事、災害救援、雷達定位及測距等領域[1]。
當前社會發展迅猛,警力資源緊張,失竊物品往往難以及時追回。若能及時發現物品的異常狀態,便能迅速應對處理。而UWB技術憑借其識別精度高的優點,能在復雜的環境中迅速識別并定位帶有信號標簽的物體,實現快速檢索,極大地降低管理難度,提升物品的安全性。
目前,GPS、藍牙、WiFi、RFID等定位技術已得到廣泛應用,但在室內定位領域,UWB技術以其高精度、低功耗的優勢脫穎而出。盡管UWB技術仍處于起步階段,但其市場前景卻十分廣闊[2]。針對室內物品監管中存在監控盲區及成本高昂問題,本文致力于通過實時監控技術來實現物品的定位與防丟功能。本文提出的基于UWB技術的室內定位系統,可廣泛應用于多個場景,如工業生產中的電子圍欄、銀行貴重物品的監控等,不僅能夠降低管理成本,還能顯著提升安全性。
1 系統組成
1.1 實現原理
本系統通過UWB技術來實現室內定位。系統由1個主基站、3個從基站及若干標簽組成。系統集成了通信技術、TDOA算法、傳感器技術、數據采集及處理方法,能夠實時監測攜帶標簽物品的位置信息,并同步監控周邊環境的溫度狀況。這一綜合解決方案有效減輕了被監控物品的管理負擔,提升了管理效率。
1.2 系統架構
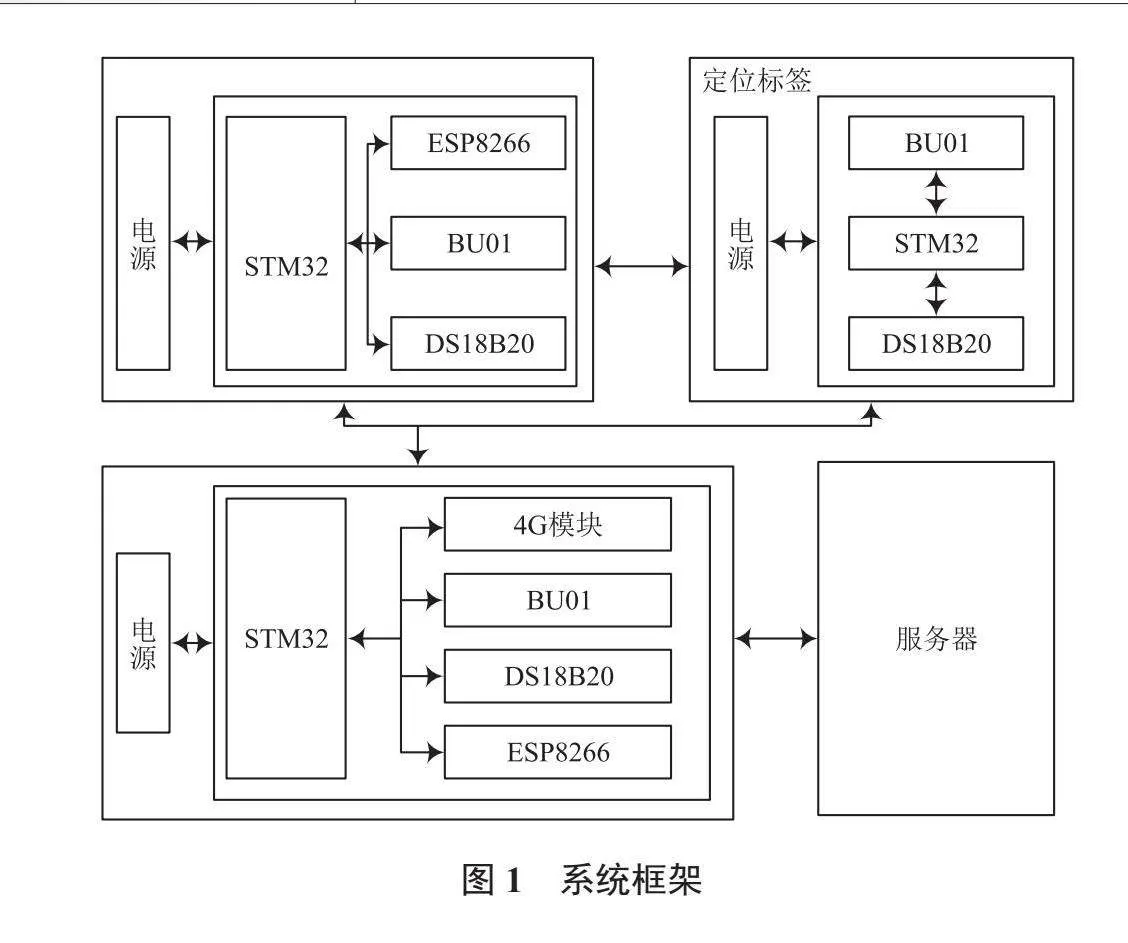
本系統采用STM32F103C8T6作為主基站、從基站及標簽的主控芯片。標簽內部集成了溫度傳感器、ESP8266模塊以及BU01模塊,主基站還額外配備了遠傳模塊以實現數據向服務器的上傳。溫度傳感器負責監控工作環境溫度以確保其處于正常范圍;ESP8266模塊用于組成連接主基站、從基站、標簽的局域網;BU01模塊用于標簽定位。系統總體框架如圖1所示。
系統每隔5 min對標簽進行一次定位,其余時間均處于休眠狀態。主基站每隔5 min通過ESP8266模塊組成的局域網向從基站與標簽發送喚醒指令。從基站收到指令后向主基站發送應答信號。標簽收到喚醒指令后向主基站發送應答信號及溫度數據。主基站接收并處理應答信號后,系統開始對標簽進行定位。從基站將標簽的位置信息和自身溫度信息通過ESP8266模塊組成的局域網傳輸至主基站,主基站接收到信息后,利用TDOA算法對這些數據進行處理,以精確解算標簽的位置。完成位置計算后,主基站將位置信息上傳至服務器。上傳完成后,主基站向從基站及標簽發送休眠指令。
2 硬件電路設計
2.1 電源電路
主基站、從基站及標簽使用同一電源方案,均可由5 V直流電源或3.7 V可充電鋰電池進行供電。當使用5 V直流電源進行供電時,電源模塊將斷開鋰電池對系統的供電,并對其進行充電。
由于主基站、從基站及標簽均有供電電壓為5 V的模塊,因此在使用3.7 V鋰電池供電時,需要采取同步升壓的方式將電壓轉換至5 V。本文選用平芯微半導體科技有限公司開發的PW5100同步升壓轉換器芯片,該芯片能夠將0.7~5 V的輸入電壓轉換為3 V、3.3 V或5 V進行輸出,最大支持1.5 A的電流。
由于主控制器及其他模塊使用3.3 V電壓進行供電,因此需要使用降壓芯片將PW5100輸出的5 V電壓轉換至3.3 V。選擇AMS1117芯片對電壓進行降壓。AMS1117是一款LDO芯片,具有外圍電路簡單、成本低等優點。
2.2 主控制器外圍電路
主基站、從基站及標簽的主控制器均選用STM32F103C 8T6,這是一款由意法半導體公司推出的基于Cortex-M3內核的32位微控制器,采用LQFP48封裝,屬于STM32系列[3]。該芯片集成了SPI、ADC、TIMER、USART、DMA等外設,具有功耗低、性能強、穩定性高等特點。外部晶振使用8 MHz晶振,經過STM32內部鎖相環倍頻后,主頻可達72 MHz,算法執行速度更快。
2.3 溫度傳感器
溫度傳感器選用DS18B20數字溫度傳感器,該傳感器輸出數字信號,具有體積小、硬件開銷低、抗干擾能力強、精度高的特點。 DS18B20數字溫度傳感器接線方便,封裝形式多樣,可應用于管道式、螺紋式、磁鐵吸附式、不銹鋼封裝式等多種場合[4]。
2.4 遠傳模塊
主基站需要將標簽的位置信息傳輸至服務器,因此需要遠傳模塊進行數據傳輸。遠傳模塊使用移遠的EC800K模塊,該模塊具有傳輸速率高、穩定性強等優點[5]。
2.5 UWB模塊
UWB定位原理是基于時間戳差值法計算電磁波飛行時間,從而確定距離[6]。基站和標簽采用UWB通信,在通信過程中帶有時間戳,因此基站可以根據時間戳計算標簽與基站的距離。
選用安信可的BU01作為UWB模塊,該模塊基于Decawave的DW1000芯片設計,定位精度可達10 cm。此外,BU01還有豐富的接口,如SPI、GPIO、喚醒引腳等,以便與主控制器進行通信和數據交換。在使用過程中,UWB的測距功能為間歇使用,以降低設備功耗。在UWB模塊工作時,其模塊的GPIO可以通過高低電平變化來表示工作狀態,因此只需將LED接到模塊的GPIO上,便可通過LED的閃爍狀態來判斷UWB模塊工作狀態是否正常,減少了后期維護的時間成本。
3 軟件設計
3.1 主基站軟件設計
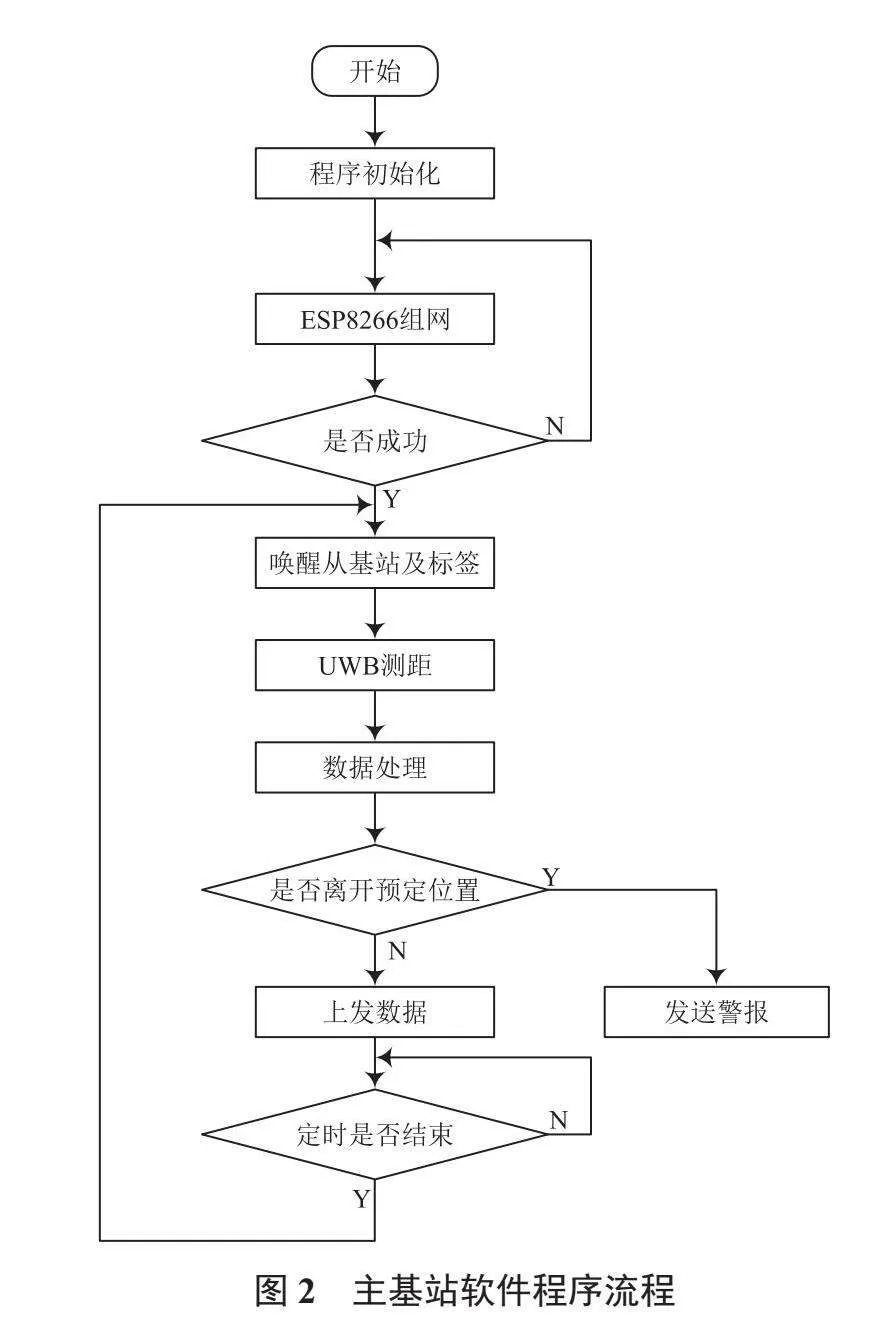
圖2所示為主基站軟件的執行流程。主基站上電后,首先進行主控制器初始化,配置時鐘接口、SPI接口、USART接口、GPIO等。在主控制器初始化完成后,測試其余模塊工作狀態是否正常。
完成自檢流程后,開始對ESP8266進行配置。為了構建一個支持主基站、從基站及標簽間通信的局域網,需要將主基站的ESP8266模塊通過AT指令配置為服務器角色,并確保從基站與標簽都成功連接到該網絡,以便進行后續的定位操作。組網完成后,主基站通過ESP8266向從基站發送指令以喚醒從基站及標簽,基站開始對標簽進行測距。在接收完基站的溫度數據、標簽位置信息及標簽溫度數據后,主基站通過TDOA算法對標簽位置進行解算,若標簽位置未超出預設的范圍,則判定標簽位置正常,主基站向服務器發送標簽位置及溫度數據;若標簽超出預設的范圍,則判斷為標簽丟失,主基站將向服務器發送警報。在上傳數據執行完畢后,主控制器向EC800K模塊發送休眠指令,以降低主基站整體待機功耗。同時通過定時器開始定時,在下次定時完畢后再次開始測距。
3.2 從基站和標簽軟件設計
從基站上電后,首先進行主控制器的初始化,在主控制器完成對外部時鐘、USART接口和SPI接口等外設的初始化后,檢測其他模塊的工作狀態是否正常。
完成自檢后,主控制器通過AT指令將ESP8266配置為客戶端,連接由主基站的ESP8266模塊創建的服務器。連接完成后,從基站會進入待機狀態,等待主基站的喚醒指令。等待期間,從基站主控制器會向BU01模塊發送對應的指令,使其進入休眠狀態以減小功耗。在接收到主機站的喚醒指令后,從基站通過ESP8266模塊向主基站發送應答信號并喚醒BU01模塊。測距完成后,從基站向主基站發送標簽位置數據以及從基站溫度數據。傳輸完成后,從基站等待主基站發送休眠指令,接收到休眠指令后開始休眠,等待主基站喚醒。
標簽主控制器初始化流程和ESP8266配置與從基站相同。在連接上由主基站創建的服務器后,標簽開始等待主基站喚醒指令;在接收到主基站的喚醒指令后,標簽向主基站發送應答信號及溫度數據并喚醒BU01模塊。傳輸完成后等待主基站發送休眠指令。
3.3 TDOA算法
主基站采用TDOA算法來解算標簽的位置。TDOA定位算法是在TOA定位算法的基礎上進行改進的,它不是直接利用目標信號的到達時間,而是利用相同信號到達不同遠端站的時間差值來定位目標位置[7-8]。相較于TOA算法需要信號到達遠端站的精確時間,TDOA算法需要的是相對時間的差值,所以在精度上有所提高,是目前應用最廣泛的多點定位算法模型。當基站個數大于3個時,非線性方程組個數要少于未知變量的個數,可以利用加權最小二乘法得到初始解,再利用得到的初始解和約束變量進行第二次加權最小二乘法估計,最后得到改進的位置估計[9-10]。
3.4 遠傳模塊軟件設計
遠傳模塊通過MQTT協議與OneNET服務器連接,主基站通過AT指令配置EC800K模塊。由于MQTT協議由固定報頭、可變報頭、有效載荷三部分組成,因此主基站的主控制器需要將標簽的位置數據以及各基站及標簽的溫度數據整合入MQTT報文內。在向服務器上傳標簽位置信息及溫度數據后,主基站向EC800K模塊發送休眠指令,以降低主基站整體待機功耗。
4 測 試
在完成系統的設計與樣機制作后,開始對系統的相關功能進行測試。在標簽超出預設范圍時,主基站會向服務器發送警報信息,用戶可以通過網頁訪問標簽位置信息。在標簽位置未超過預設范圍時,主基站會每隔5 min上傳一次標簽位置。OneNET云平臺界面如圖3所示。
5 結 語
本文針對室內物品監管中存在監控盲區、成本高昂等問題,提出了一種基于UWB技術的室內定位系統,通過對室內物品進行實時監控來防止丟失。本系統靈敏度高、穩定性強,能夠有效實現室內物品的定位與防丟功能,具有較高的實際應用價值。
參考文獻
[1] 王川陽,王堅,余航,等.測距誤差改正的超寬帶定位系統研究[J].測繪科學,2019,44(1):98-103.
[2] 劉金鑄,周冉.一種新的MB-OFDM-UWB技術分析與應用[J].電視技術,2007(8):68-70.
[3] 鄭冰倩,顏翠翠,劉云斐,等.智能語音垃圾分類器設計[J].電子制作,2023,31(18):55-58.
[4] 柳春林.基于OneNET云平臺的智能魚缸研究報告[J].科學技術創新,2019(4):53-55.
[5] 潘德斯,馬振寧,曾衛華,等.基于4G網絡的地球物理數傳系統的設計[J].集成電路應用,2022,39(3):38-40.
[6] 馬振華,張鵬飛,何印,等.基于UWB輔助的多無人機慣導定位誤差校正方法[J].計算機測量與控制,2023,31(9):253-259.
[7] 趙紅梅,趙杰磊.超寬帶室內定位算法綜述[J].電信科學,2018,34(9):130-142.
[8] 劉立洋,于存湛,于瀅.變電站三維安全跟蹤防護系統的研究與開發[J].東北電力技術,2013,34(9):47-50.
[9] 張碧仙.基于UWB技術的車輛定位算法研究[J].黑龍江工業學院學報(綜合版),2020,20(12):122-129.
[10] 陳曉維,李校林.蜂窩網絡中基于TDOA的CHAN定位算法性能分析[J].廣東通信技術,2007(8):66-68.
