果園環(huán)境下采摘機(jī)器人水果目標(biāo)識(shí)別算法探究
2024-12-31 00:00:00徐曉婧李艷
智慧農(nóng)業(yè)導(dǎo)刊 2024年9期
關(guān)鍵詞:機(jī)器視覺(jué)



摘 "要:該文研究果園環(huán)境下綠色陽(yáng)光玫瑰葡萄的果實(shí)圖像分割和定位方法。在分析了順光、逆光和夜間3種光照情況下的采集圖像后,選取最能體現(xiàn)綠色葡萄果實(shí)的顏色分量作為分割算法的輸入圖像。利用最大類間方差法(OTSU)和支持向量機(jī)法(SVM)實(shí)現(xiàn)果實(shí)和背景區(qū)域的分割。實(shí)驗(yàn)結(jié)果對(duì)比表明,綠色葡萄在夜間的識(shí)別率高于晴天順光和逆光的情況。比較2種算法的準(zhǔn)確率,可以發(fā)現(xiàn)SVM算法在晴天順光和逆光時(shí)的準(zhǔn)確率更高,而OTSU算法在夜間情況時(shí)較高,達(dá)到了98.7%。
關(guān)鍵詞:綠色葡萄;圖像分割;OTSU算法;SVM算法;機(jī)器視覺(jué)
中圖分類號(hào):TP242 " " " 文獻(xiàn)標(biāo)志碼:A " " " " "文章編號(hào):2096-9902(2024)09-0025-05
Abstract: The method of fruit image segmentation and location of green sunshine rose grape (aka. Vitis Labrusca) in orchard environment was studied in this paper. After analyzing the captured images under the conditions of smooth light, backlight and night light, the color component which can best reflect the green grape fruit is selected as the input image of the segmentation algorithm. The maximum inter-class variance method OTSU and support vector machine method SVM are used to segment fruit and background regions. The experimental results show that the recognition rate of green grapes at night is higher than that of smooth light and backlight in sunny days. Comparing the accuracy of the two algorithms, we can find that the accuracy of SVM algorithm is higher in sunny days with smooth light and backlight, while OTSU algorithm is higher at night, reaching 98.7%.
Keywords: green grape; image segmentation; OTSU algorithm; SVM algorithm; machine vision
葡萄是世界上最古老的果樹(shù)品種之一,世界各地均有栽培。針對(duì)葡萄采摘的季節(jié)性強(qiáng)、工作強(qiáng)度大、人工成本高等問(wèn)題,采摘機(jī)器人的應(yīng)用和推廣具有重要的意義。
采摘機(jī)器人在采摘葡萄果實(shí)之前,首先要通過(guò)目標(biāo)識(shí)別系統(tǒng)將果實(shí)從復(fù)雜的自然環(huán)境中識(shí)別出來(lái)。目前,針對(duì)果實(shí)采摘機(jī)器人的識(shí)別方法主要有基于顏色空間的識(shí)別方法和基于幾何形狀、紋理特征的識(shí)別方法。本文研究的是綠色陽(yáng)光玫瑰葡萄,其果實(shí)與背景顏色相近,首先對(duì)葡萄的顏色特征進(jìn)行分析,選擇并提取最能凸顯綠色葡萄的顏色分量;然后采用OTSU法和SVM法對(duì)自然環(huán)境下的綠色陽(yáng)光玫瑰葡萄進(jìn)行圖像分割和識(shí)別。
1 "圖像采集及分析
1.1 "葡萄圖像的采集
本項(xiàng)目以嘉興駿輝生態(tài)有限公司種植的綠色陽(yáng)光玫瑰葡萄為研究對(duì)象,相機(jī)拍攝距離約為2 m,圖像大小為3 648像素×2 736像素。為了減少圖像的處理時(shí)間,將圖像大小調(diào)整至640像素×480像素。采集的圖像包括晴天順光、晴天逆光、晴天夜間3種不同光照條件,3種光線情況下各采集葡萄圖像200余幅。
1.2 "顏色特征的分析
通過(guò)對(duì)比、分析綠色陽(yáng)光玫瑰葡萄果實(shí)和枝干、葉子等背景顏色的差異性,選擇最能體現(xiàn)綠色葡萄果實(shí)的顏色分量作為果實(shí)圖像分割算法的輸入圖像。將相機(jī)采集的果實(shí)RGB圖像通過(guò)一定的變換轉(zhuǎn)換成Lab、YCbCr和HSI等幾種常見(jiàn)的顏色空間。
1.2.1 "RGB顏色空間
RGB顏色成為三原色,是圖像處理中最基本的顏色模型。該模型根據(jù)紅色(Red)、綠色(Green)和藍(lán)色(Blue)3個(gè)分量的亮度定量來(lái)顯示。當(dāng)光照亮度改變時(shí),R、G和B分量即會(huì)隨之改變。因此,RGB顏色空間不適合進(jìn)行圖像的分割。
1.2.2 "Lab顏色空間
自然界中的任何色彩都可以用L、a、b 3個(gè)數(shù)值進(jìn)行描述,與RGB顏色空間相比,Lab顏色空間模型涉及的算法復(fù)雜度高,所需要的計(jì)算時(shí)間也相對(duì)較長(zhǎng),但是Lab顏色空間模型不受外界因素的影響,能較好地反應(yīng)目標(biāo)物體的顏色。
1.2.3 "YCbCr顏色空間
YCbCr顏色模型單獨(dú)將亮度這個(gè)信息量分離,能夠有效地克服光照亮度對(duì)目標(biāo)圖像的干擾,普遍地應(yīng)用于圖像檢測(cè)和分割領(lǐng)域。
1.3 "顏色分量的提取
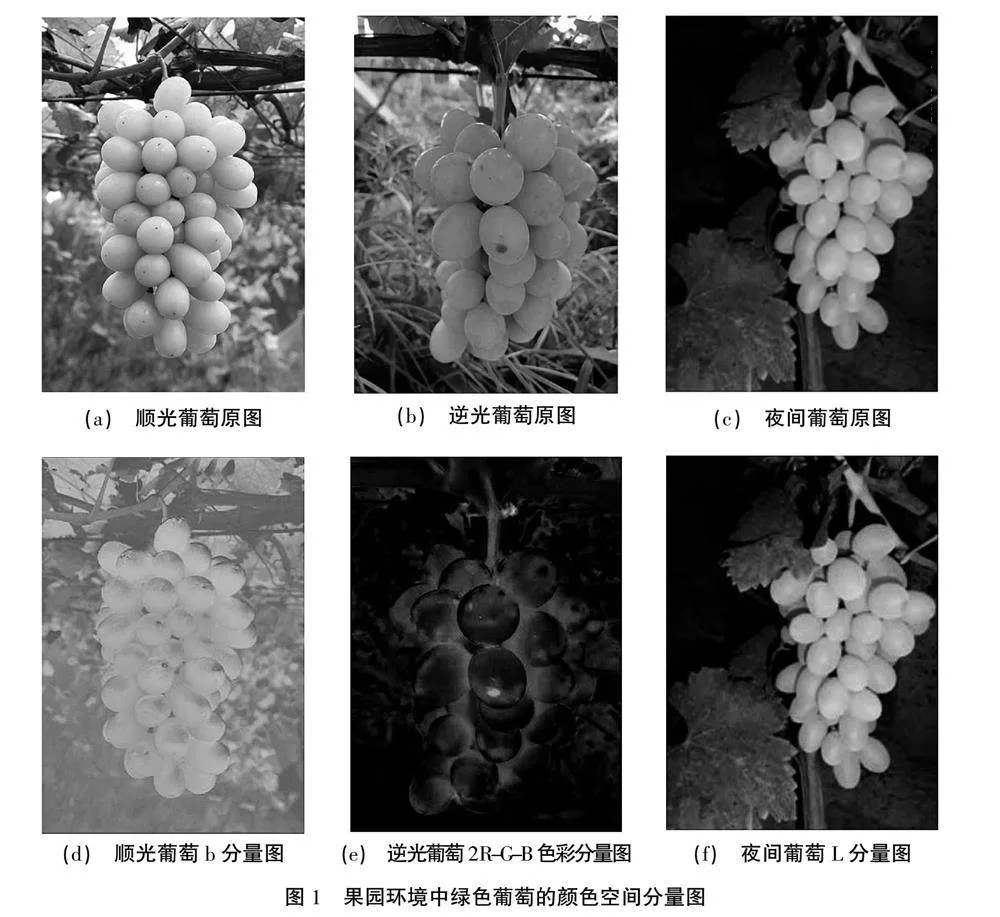
綠色陽(yáng)光玫瑰葡萄成熟后呈黃綠色,其果實(shí)與背景顏色相近。在對(duì)相機(jī)采集的600幅果實(shí)圖像進(jìn)行顏色空間的特征分析后,發(fā)現(xiàn)晴天順光情況下,葡萄果實(shí)在Lab顏色空間的b分量值明顯高于背景;在逆光情況下,葡萄的2R-G-B分量值較明顯;在夜間情況下,葡萄在Lab空間的L分量值較明顯。適合用于葡萄圖像的分割和識(shí)別。圖1為綠色陽(yáng)光玫瑰葡萄在晴天順光、逆光和夜間情況下的顏色空間分量圖。
2 "果實(shí)圖像分割算法
2.1 "基于顏色空間的OTSU圖像分割
OTSU算法又叫做最大類間方差法,是一種圖像灰度自適應(yīng)閾值的分割算法,能夠較好地將目標(biāo)圖像從背景中分離提取出來(lái)。在提取圖像的過(guò)程中,由于葡萄果實(shí)顆粒之間的間隙、果實(shí)與背景葉片顏色相近、光照情況等因素,會(huì)造成一定程度的誤差,因此在圖像OTSU分割后,需要通過(guò)一系列的數(shù)學(xué)形態(tài)學(xué)運(yùn)算來(lái)優(yōu)化圖像分割的效果。
首先,利用孔洞填充的方法消除因葡萄果粒間隙引起的小型孔洞。通過(guò)刪除小面積對(duì)象的運(yùn)算去除目標(biāo)圖像之外,因顏色相近或是光照強(qiáng)度等問(wèn)題而存在的噪聲誤區(qū)。然后,再通過(guò)開(kāi)運(yùn)算和閉操作,消除細(xì)小的物體,光滑目標(biāo)對(duì)象的外部輪廓,同時(shí)基本不影響目標(biāo)圖像的面積。最后,通過(guò)三維重構(gòu)法對(duì)分割出的圖像目標(biāo)進(jìn)行還原,并在獲取的RGB圖像中對(duì)其進(jìn)行定位。利用regionptops函數(shù)獲取圖像區(qū)域的屬性,并繪制葡萄果實(shí)輪廓的最小外界矩形。自然環(huán)境下基于OTSU算法的葡萄果實(shí)圖像分割和目標(biāo)識(shí)別過(guò)程如圖2所示。
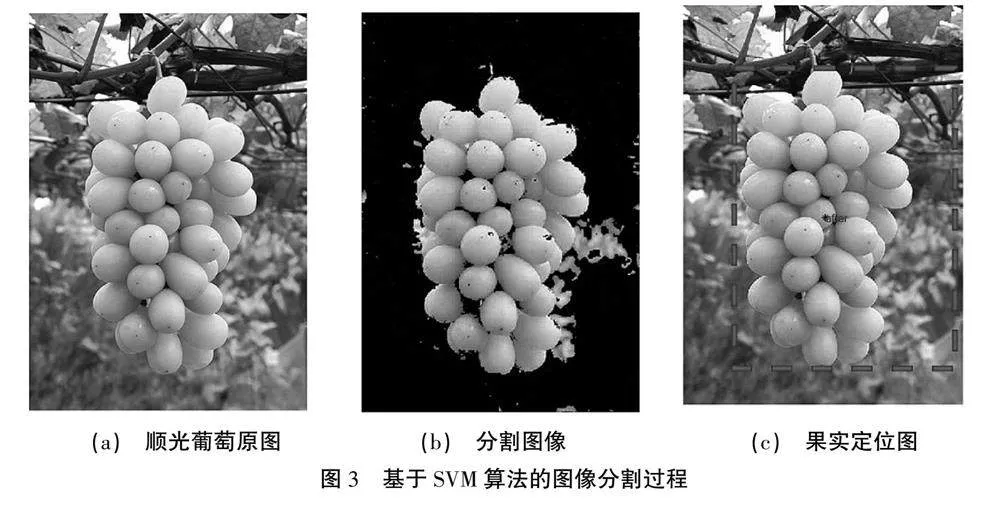
2.2 "基于SVM的圖像分割
SVM算法是一種建立在結(jié)構(gòu)風(fēng)險(xiǎn)最小化和VC維理論基礎(chǔ)上的核學(xué)習(xí)方法。采用SVM算法對(duì)彩色葡萄圖像進(jìn)行分割的關(guān)鍵在于模型的構(gòu)造,即尋找一個(gè)最優(yōu)的分類超平面,將目標(biāo)樣本和背景完美地分隔。
本文在傳統(tǒng)方法的基礎(chǔ)上進(jìn)行了改進(jìn),基于采集的RGB圖像選取像素峰值附近的樣本點(diǎn)創(chuàng)建訓(xùn)練集,利用訓(xùn)練好的SVM模型對(duì)葡萄圖像進(jìn)行分析,通過(guò)決策函數(shù)判定圖像中各個(gè)像素點(diǎn)所屬的類別,從而進(jìn)行圖像的分割和目標(biāo)的定位。自然環(huán)境下基于SVM算法的葡萄果實(shí)圖像分割和目標(biāo)識(shí)別過(guò)程如圖3所示。
2.3 "2種算法的對(duì)比
選取順光、逆光和夜間3種不同的光照條件,各采集200余幅綠色陽(yáng)光玫瑰葡萄的RGB圖像,利用MATLAB對(duì)采集圖像進(jìn)行識(shí)別處理,并將重建圖像與原圖像進(jìn)行對(duì)比分析,可獲得綠色葡萄果實(shí)的Dice值,見(jiàn)表1。
根據(jù)葡萄果實(shí)的識(shí)別效果分析可知:在晴天順光時(shí)選取Lab顏色空間中的b分量,通過(guò)OTSU算法綠色葡萄果實(shí)的識(shí)別率可達(dá)90.99%,通過(guò)SVM算法可達(dá)到91.76%。在晴天逆光情況下選取RGB顏色空間的2R-G-B分量,2種算法的果實(shí)識(shí)別率分別達(dá)到84.50%和87.54%。在夜間情況時(shí)選取Lab顏色空間的L分量,2種算法的果實(shí)識(shí)別率可高達(dá)98.70%和97.57%。
3 "結(jié)論
從葡萄果實(shí)的識(shí)別效果表中分析可知:在夜間狀況下,綠色葡萄的果實(shí)圖像分割和定位最為精準(zhǔn),2種算法均可達(dá)到97%以上,晴天順光情況次之,而晴天逆光情況下的果實(shí)識(shí)別率最差。在晴天順光和逆光2種光照強(qiáng)度下,OTSU算法比SVM算法的果實(shí)識(shí)別率普遍較低一些,而在夜間時(shí),基于OTSU算法的圖像分割精確度卻比SVM算法高。不同光照情況下綠色葡萄的識(shí)別效果及目標(biāo)定位如圖4所示。
自然環(huán)境下的綠色葡萄目標(biāo)識(shí)別和定位一直是采摘機(jī)器人領(lǐng)域的一個(gè)研究難點(diǎn)。本文對(duì)果園環(huán)境下3種不同光照強(qiáng)度的葡萄圖像進(jìn)行了研究,通過(guò)分析葡萄果實(shí)和果園背景在各顏色空間的分布情況,利用OTSU算法和SVM算法對(duì)其進(jìn)行了目標(biāo)圖像的分割和識(shí)別,并取得了理想的結(jié)果,為采摘機(jī)器人對(duì)葡萄果梗采摘點(diǎn)的檢測(cè)和確定奠定了基礎(chǔ)。
參考文獻(xiàn):
[1] 鄭太雄,江明哲,馮明馳.基于視覺(jué)的采摘機(jī)器人目標(biāo)識(shí)別與定位方法研究綜述[J].儀器儀表學(xué)報(bào),2021(9):41.
[2] 羅陸峰.視覺(jué)感知的葡萄機(jī)器人采摘行為及虛擬試驗(yàn)[D].廣州:華南農(nóng)業(yè)大學(xué),2017.
[3] 王成琳.基于光照均值化的多類水果采摘機(jī)器人雙目視覺(jué)定位研究[D].廣州:華南農(nóng)業(yè)大學(xué),2018.
[4] 李鳳麗.基于機(jī)器視覺(jué)的水果識(shí)別與定位技術(shù)研究[D].曲阜:曲阜師范大學(xué),2018.
[5] 景曉梅.自然環(huán)境下蘋(píng)果目標(biāo)的識(shí)別算法研究[D].西安:西安科技大學(xué),2020.
[6] 張丹丹,章光,陳西江,等.改進(jìn)YCbCr和區(qū)域生長(zhǎng)的多特征融合對(duì)的火焰精準(zhǔn)識(shí)別算法[J].激光與光電子學(xué)進(jìn)展,2020,57(6):226-237.
[7] 林啟招,孫永科,邱堅(jiān).基于YCbCr顏色空間的木材紋理檢測(cè)技術(shù)[J].信陽(yáng)農(nóng)林學(xué)院學(xué)報(bào),2020,30(3):100-103,112.
[8] 章怡,王海峰.一維對(duì)象復(fù)雜度的灰度圖像分割算法[J].太赫茲科學(xué)與電子信息學(xué)報(bào),2020,18(6):1058-1064.
猜你喜歡
軟件導(dǎo)刊(2016年11期)2016-12-22 21:52:17
電腦知識(shí)與技術(shù)(2016年28期)2016-12-21 12:13:14
科技視界(2016年26期)2016-12-17 17:31:58
科技視界(2016年25期)2016-11-25 19:53:52
科技視界(2016年25期)2016-11-25 09:27:34
科教導(dǎo)刊(2016年25期)2016-11-15 17:53:37
軟件工程(2016年8期)2016-10-25 15:55:22
科技視界(2016年20期)2016-09-29 11:11:40
科技視界(2016年6期)2016-07-12 09:12:40
科技視界(2016年15期)2016-06-30 19:03:30
