基于 5G 和北斗的城市路口車速引導終端
2024-12-31 00:00:00陳杰威付偉
西部交通科技 2024年9期



基金項目:
廣西高校中青年教師科研基礎能力提升項目“基于5G和北斗的城市路況交通路口安全車速引導系統”(編號:2021KY1124)
作者簡介:
陳杰威(1991—),碩士,講師,研究方向:通信技術、智慧交通。
摘要:文章提出了一種采用5G通信和北斗衛星導航系統的城市交通路口車速引導終端,以及使用雙目視覺技術輔助車速引導的方法,并使用樹莓派、5G和北斗模塊等搭建了試驗環境,使用Python語言編程實現了引導終端的主控軟件。通過實際道路試驗表明,使用該車速引導終端可以幫助駕駛員提前規劃行駛車速,實現剛好在綠燈時通過路口。
關鍵詞:車速引導;5G;北斗;雙目視覺
中圖分類號:U495文獻標識碼:A 50 167 2
0 引言
在城市交通環境中,交通路口是擁堵頻繁出現的痛點所在。交通信號燈是控制交通路口通過秩序的重要手段,但同時也是交通擁堵問題的誘因之一。特別是在高峰時段,如果信號燈時序未能與交通流量妥善協調,便可能誘發車輛的積聚現象,進而導致交通堵塞的形成與擴散。同時,機動車輛駕駛員在駕駛汽車時,為了避免遇上紅燈,常會在路口附近急加速,成為交通事故的隱患。
車速引導技術旨在讓機動車輛駕駛員在距離交通路口較遠時,即可提前獲取路口信號燈的狀態,提前規劃行車路線與車速,主動配合信號燈控制時序,從而實現盡量在綠燈時到達交通路口。通過此技術可以提高交通路口的通行效率,改善駕駛員的交通體驗,降低因搶綠燈而導致的交通事故隱患[1]。
本文將介紹一種基于5G通信和北斗衛星導航定位技術的車速引導終端,同時采用雙目視覺技術作為車速引導輔助的方法,對道路中其他車輛進行識別和提示,優化車速引導流程。本文將搭建試驗終端,進行實際道路試驗,以期說明使用車速引導終端和相關技術可以有效提高車輛在交通路口的通過效率。
1 系統設計
1.1 硬件設計
圖1為本文研究的車速引導終端的系統框圖。該終端采用樹莓派4B作為主控設備。樹莓派4B具備ARM Cortex-A72核心,4 G RAM,并運行基于Linux的Raspberry Pi OS操作系統。其主要作用是通過GPIO、USB、HDMI等通用接口,連接其他各個模塊,并通過編寫基于Linux的Python語言程序,對整個車速引導終端進行總體控制、用戶交互。
本文研究的終端采用的5G模塊為SIMCom公司的SIM8202G模組。該模組支持Sub-6G頻段的5G通信技術,同時兼容包括北斗在內的多種GNSS全球導航衛星定位系統。該模組采用M.2接口,通過擴展板與樹莓派的USB接口相連,接收來自樹莓派的控制信號,并將5G通信網絡信號、北斗導航定位數據回傳至樹莓派。另外,該模組與4天線模組,通過IPEX-4接口相連,實現無線信號的收發,其中天線采用全向高增益天線,工作頻段為600~6 000 MHz。
本文研究的終端還可以選擇配置雙目視覺模塊。雙目視覺技術是機器視覺中的一個重要分支,已經廣泛適用于智能駕駛等領域。雙目視覺相比于單目視覺,可以獲得目標的深度信息,即距離信息,可以實現對目標的測距[2]。在本文中,雙目視覺模塊的主要作用是識別道路中的其他車輛,并進行距離測量,作為車速引導過程中的輔助。
1.2 軟件設計
1.2.1 車速引導功能
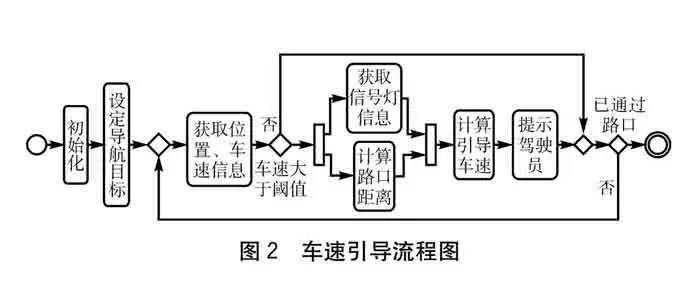
下頁圖2為本文研究的車速引導功能的軟件流程圖。其中初始化包括了軟件UI界面、5G通信模組、北斗導航定位模塊的初始化。在軟件的使用中,需要設定導航目標,以便確定前方路口的位置信息。軟件將使用Python的pynmea2庫,解析來自北斗模塊的NMEA報文,該報文包括了通過北斗系統獲取的車輛當前位置、車速等信息。然后判斷當前車速是否大于閾值。當車速小于閾值時,說明車輛處于停止狀態或者車速過慢,會提示駕駛員先加速行駛后,方能使用車速引導功能。
當車速滿足閾值要求后,車速引導功能激活,通過云端獲取前方路口的位置經緯度坐標、信號燈的當前相位、計時、周期等信息;同時接入百度地圖的開發者API,結合當前車輛的位置,計算通過當前道路到達前方路口的距離信息。需要說明的是,此處選擇接入百度地圖的開發者API,是考慮到并非所有道路都是直線,兩點間海拔高度也不一定相同,直接使用地球坐標系計算距離存在較大誤差。而百度地圖的距離計算,是經過精確測繪得到的,誤差較小。獲得上述信息后,軟件采用文獻[3]所述方法計算得到一個引導車速,并通過軟件UI界面、語音播報等方式,提示駕駛員。該過程將每間隔一定時間執行一次,更新引導車速,以適應駕駛員的實際加減速情況,直至車輛通過路口為止。
1.2.2 雙目視覺輔助
在實際交通環境下,車速引導過程必然受到其他車輛的影響。本節將介紹雙目視覺技術作為車速引導的輔助。雙目視覺技術可以檢測車輛前方、側前方一定范圍內的車輛,并進行距離測量,結合車速引導功能提前對駕駛員進行提示、警示,進一步優化車速引導性能。
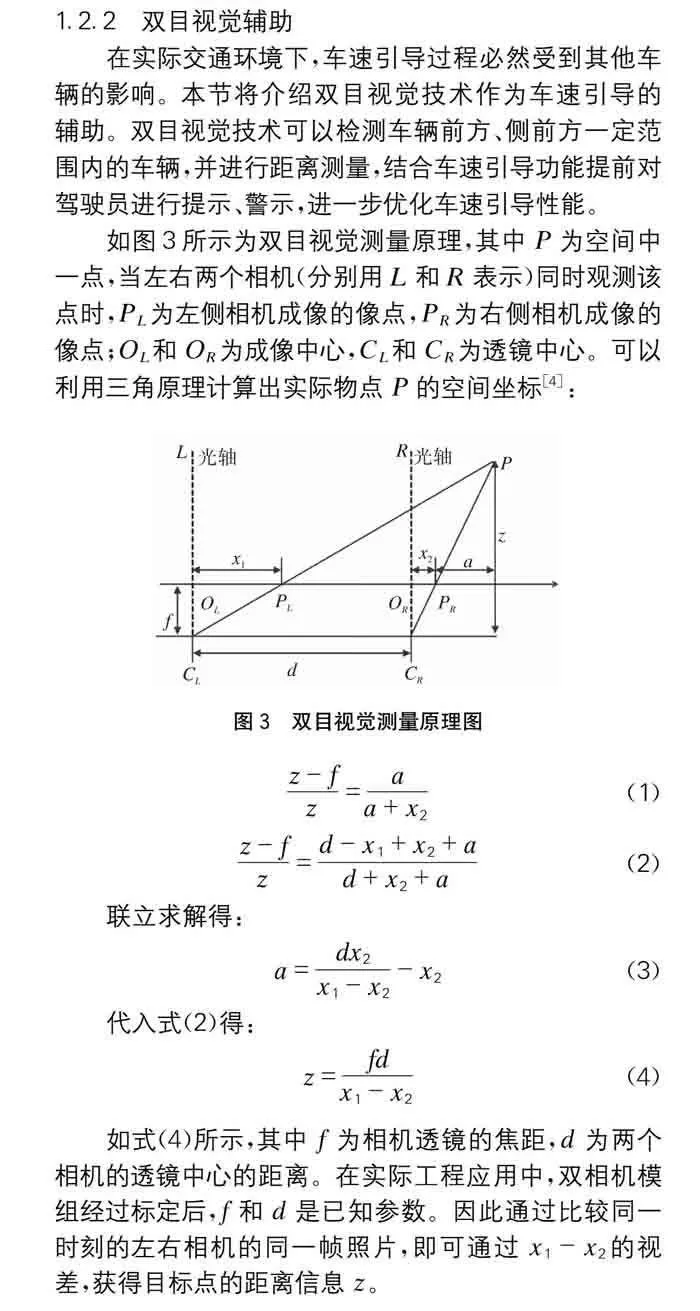
如圖3所示為雙目視覺測量原理,其中P為空間中一點,當左右兩個相機(分別用L和R表示)同時觀測該點時,PL為左側相機成像的像點,PR為右側相機成像的像點;OL和OR為成像中心,CL和CR為透鏡中心。可以利用三角原理計算出實際物點P的空間坐標[4]:
如式(4)所示,其中f為相機透鏡的焦距,d為兩個相機的透鏡中心的距離。在實際工程應用中,雙相機模組經過標定后,f和d是已知參數。因此通過比較同一時刻的左右相機的同一幀照片,即可通過x1-x2的視差,獲得目標點的距離信息z。
圖4為雙目視覺輔助車速引導的流程。通過雙目測距、測速,檢測本車道前方是否有其他車輛阻礙,如果有且車速小于當前引導車速,則將對車速引導過程構成影響。此時,應繼續通過雙目視覺判斷旁車道是否具備變道條件,如果具備則提示駕駛員變更車道和繼續車速引導過程;如果不具備變道條件,則自動放棄本車速引導方案,改為等待下一輪綠燈通過,并提示駕駛員。此處引導方法同樣參考文獻[3]。
2 試驗測試
2.1 試驗設備與環境
圖5為本文研究的試驗平臺。該平臺采用如上文所述的樹莓派4B 4G RAM作為主控模塊,搭配SIMCom公司的SIM8202G 5G和北斗通信模塊;采用4天線設計,其中1個為延長天線,可放置于車輛頂部,增強北斗衛星信號;同時搭配7英寸觸控電容屏作為UI界面顯示和設備控制。試驗所用測試車輛為歐拉牌純電汽車,具備定速巡航功能。
本文研究的試驗道路位于廣西南寧市興寧區平云大道(起點經緯度:108.43397498,22.90212079,終點經緯度:108.43716145,22.89284025,均為GCJ-02坐標系)。該試驗道路是長度約1.5 km的開放道路,但非高峰期的車流量較小,適合進行路測試驗。由于該道路的紅綠燈尚未正常啟用,本次試驗采用模擬紅綠燈的形式。
2.2 試驗方法與結果
本文采用以下試驗方法:在試驗路段,使用車輛的定速巡航功能,提前加速至初始車速。然后在距離交通路口一定范圍內開始車速引導。
引導期間,使用車輛的定速巡航功能調整車速為引導終端給出的引導車速,然后勻速前進,直到通過路口為止,并記錄通過結果。
需要說明的是,車輛的定速巡航功能通常采用車輛自身的車速表作為參考,具有一定的誤差,同時北斗導航定位獲得的數據也存在一定的誤差,且可能包含一定網絡時延。故實際試驗結果會與理想數學推導有一定偏差。
試驗參數:紅綠燈周期為30 s,綠燈20 s,紅燈10 s,無黃燈。
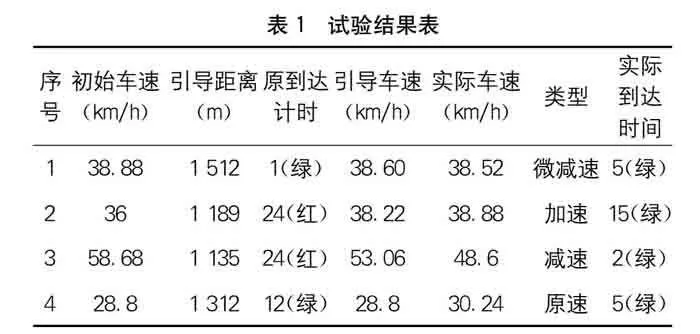
表1為4次試驗的結果,其中初始車速為車輛車速引導前的車速;引導距離為車輛開始調整車速為引導車速時,車輛位置到路口的距離;原到達時間為如果按照初始車速,經過數學推導得出的預計到達路口的紅綠燈計時,采用周期計時形式,括號中為對應紅綠燈狀態;引導車速為引導終端給出的建議車速;實際車速為車輛參考引導車速調整后的實際車速(平均值);類型是引導類型,其中微減速指車輛預計在綠燈剛剛開始時到達,為避免踩點、增加可靠性,建議稍微減緩速度,加速或減速指車輛預計在紅燈時到達,建議加速趕上綠燈或減速等待下一輪綠燈;原速指車輛預計可以在綠燈時到達,不需要調整車速。
試驗結果證明,使用本車速引導終端,可以讓駕駛員在“超視距”情況下,提前感知前方路口的紅綠燈信息,并且根據給定的引導車速行駛,就可以避免碰上紅燈,無需停等地一次性通過路口。
3 結語
本文介紹了一種基于5G和北斗技術的城市交通路口車速引導終端,以及使用雙目視覺技術輔助車速引導的方法,并使用樹莓派、5G和北斗模塊等搭建了實驗平臺,同時利用Python語言編寫了引導終端的控制程序。實驗結果表明,使用該引導終端可以有效幫助駕駛員提前感知前方路口的紅綠燈信息,并根據終端的建議提前改變車速,最終實現剛好綠燈時到達并通過路口的目的。本文還存在不足,雙目視覺模塊因為芯片性能問題,未能達到上路測試的要求,只能進行原理驗證試驗。后續研究將進一步優化這個功能。
參考文獻
[1]汪錦文. 基于V2I的智能汽車綠波通行策略研究[D].廈門:廈門理工學院,2023.
[2]廖素英. 實時雙目立體視覺研究[D]. 成都:電子科技大學,2005.
[3]陳杰威,鄭欣悅,劉 丹,等.北斗系統應用環境下的車速引導效能分析[J]. 西部交通科技,2022(9):146-148,205.
[4]賈云得. 機器視覺[M]. 北京:科學出版社,2000.