氣動(dòng)電磁閥設(shè)計(jì)及動(dòng)態(tài)特性仿真研究
2024-12-28 00:00:00司國(guó)雷郭大勇唐兵王嘉磊
機(jī)械制造與自動(dòng)化 2024年6期


摘要:根據(jù)氣動(dòng)電磁閥技術(shù)指標(biāo),基于AMESim進(jìn)行模型仿真,確定電磁閥的結(jié)構(gòu)尺寸和動(dòng)態(tài)響應(yīng)時(shí)間參數(shù)。結(jié)果發(fā)現(xiàn)電磁閥的關(guān)閉時(shí)間為66 ms,遠(yuǎn)大于技術(shù)指標(biāo)中響應(yīng)時(shí)間≤10ms的要求。通過(guò)分析發(fā)現(xiàn)影響電磁閥關(guān)閉時(shí)間長(zhǎng)的主要原因是:電磁閥在關(guān)閉過(guò)程中線圈電壓是緩慢變化的,其磁通也是緩慢減小的,從而在閥芯中引起渦流,阻礙了閥芯的運(yùn)動(dòng)。采用雙電壓控制方式,在電磁閥關(guān)閉時(shí)增加反向電壓,降低電磁閥的關(guān)閉滯后時(shí)間,將電磁閥的關(guān)閉時(shí)間從66ms降低到4.5 ms,通過(guò)試驗(yàn)驗(yàn)證了仿真分析的正確性。
關(guān)鍵詞:氣動(dòng)電磁閥;AMESim;動(dòng)態(tài)響應(yīng)時(shí)間;雙電壓控制
中圖分類號(hào):TH138文獻(xiàn)標(biāo)志碼:A文章編號(hào):1671-5276(2024)06-0113-06
Abstract:According to the technical specifications of pneumatic solenoid valves, a model simulation was conducted based on AMESim, and the structural dimensions and dynamic response time parameters of the solenoid valve were determined. The results showed that the closing time of the solenoid valve was 66 ms, far greater than the requirement of response time ≤ 10ms in the technical specifications. Through analysis, it is found that the main reason affecting the long closing time of the solenoid valve is that during the closing process of the solenoid valve, the coil voltage changes slowly, and its magnetic flux also decreases slowly, which causes eddy currents in the valve core and hinders the movement of the valve core. By adopting a dual voltage control method, the reverse voltage is increased when the solenoid valve is closed, reducing the closing delay time of the solenoid valve, and reducing the closing time of the solenoid rom 66 ms to 4.5ms. The correctness of the simulation analysis is verified by experiments.
Keywords:pneumatic solenoid valve; AMESim; dynamic response time; dual voltage control
0引言
隨著氣動(dòng)技術(shù)的不斷發(fā)展,氣動(dòng)元件也越來(lái)越多,氣動(dòng)電磁閥就是其中之一[1]。它主要由微處理器和計(jì)算機(jī)進(jìn)行控制,無(wú)需D/A轉(zhuǎn)換,操作和維修方便,同時(shí)具有體積小、成本低、抗污染能力強(qiáng)、切換迅速、重復(fù)誤差小的優(yōu)點(diǎn),已成為當(dāng)今氣動(dòng)技術(shù)研究和發(fā)展的重要方向[2-6]。由于氣動(dòng)閥不同于液控閥,包括其密封方式、結(jié)構(gòu)形式和動(dòng)態(tài)特性等,因此有必要對(duì)氣動(dòng)電磁閥進(jìn)行設(shè)計(jì)及動(dòng)態(tài)特性仿真研究。
動(dòng)態(tài)特性是所有電磁閥需要研究的一個(gè)共性問(wèn)題。近年來(lái),國(guó)內(nèi)外許多學(xué)者對(duì)其進(jìn)行了研究。KAWASE等[7]使用有限元方法對(duì)電磁閥的電磁組件進(jìn)行了仿真,根據(jù)電磁鐵的磁場(chǎng)分布計(jì)算了不同條件下電磁力隨時(shí)間的變化。沈赤兵等[8]結(jié)合經(jīng)驗(yàn)公式對(duì)小推力液體火箭發(fā)動(dòng)機(jī)中的電動(dòng)氣閥進(jìn)行了數(shù)值計(jì)算,分析了入口壓力和彈簧預(yù)緊力對(duì)電磁閥的影響,但是結(jié)構(gòu)比較復(fù)雜,成本較高。XIANG等[9]研究了銜鐵形狀對(duì)電磁閥動(dòng)態(tài)響應(yīng)的影響。戴佳等[10]對(duì)氣動(dòng)電磁閥的響應(yīng)過(guò)程進(jìn)行了仿真研究。以上研究都只是對(duì)電磁閥的結(jié)構(gòu)參數(shù)進(jìn)行仿真和優(yōu)化,沒(méi)有從控制方面進(jìn)行研究。
本研究針對(duì)氣動(dòng)電磁閥技術(shù)指標(biāo),開展相關(guān)研究工作。針對(duì)電磁閥關(guān)閉時(shí)間較長(zhǎng)、遠(yuǎn)大于技術(shù)指標(biāo)問(wèn)題,通過(guò)分析根本原因,提出雙電壓控制方式。通過(guò)在電磁閥關(guān)閉時(shí)增加反向電壓,降低電磁閥的關(guān)閉滯后時(shí)間,將電磁閥的關(guān)閉時(shí)間從66ms降低到4.5ms,優(yōu)化了氣動(dòng)電磁閥的動(dòng)態(tài)響應(yīng)特性,并通過(guò)試驗(yàn)驗(yàn)證了仿真分析的正確性。
其中氣動(dòng)電磁閥設(shè)計(jì)指標(biāo)如下:
1)工作介質(zhì)為氮?dú)猓?/p>
2)工作壓力為1.5MPa;
3)控制電壓為(24±3)V;
4)電阻≤65Ω;
5)響應(yīng)時(shí)間≤10ms;
6)外形尺寸≤(60mm×40mm×40mm);
7)流量≥800L/min;
8)在1.5MPa壓力下,泄漏量<0.6mL/min。
1氣動(dòng)電磁閥設(shè)計(jì)計(jì)算
1.1氣動(dòng)電磁閥初步結(jié)構(gòu)及工作原理
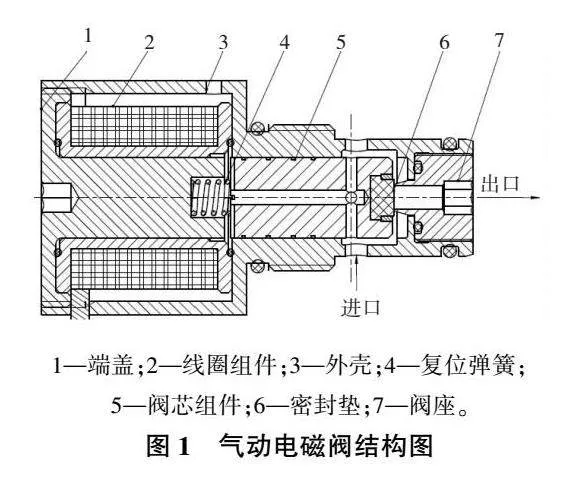
根據(jù)氣動(dòng)電磁閥的外形尺寸要求,初步設(shè)計(jì)的電磁閥結(jié)構(gòu)如圖1所示。
氣動(dòng)電磁閥主要由端蓋、線圈組件、外殼、復(fù)位彈簧、閥芯組件、密封墊和閥座組成。線圈通電后,隨著電磁力的不斷增加,當(dāng)電磁力大于彈簧力、氣壓力和摩擦力之和時(shí),閥芯吸合,電磁閥打開,進(jìn)出氣口相通;當(dāng)線圈斷電后,閥芯在彈簧力的作用下復(fù)位,進(jìn)出氣口關(guān)閉。
1.2氣動(dòng)電磁閥設(shè)計(jì)計(jì)算
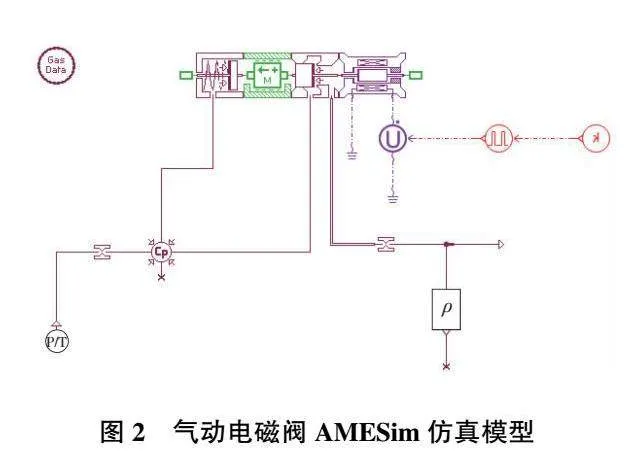
根據(jù)氣動(dòng)電磁閥的結(jié)構(gòu)圖建立AMESim仿真模型如圖2所示。
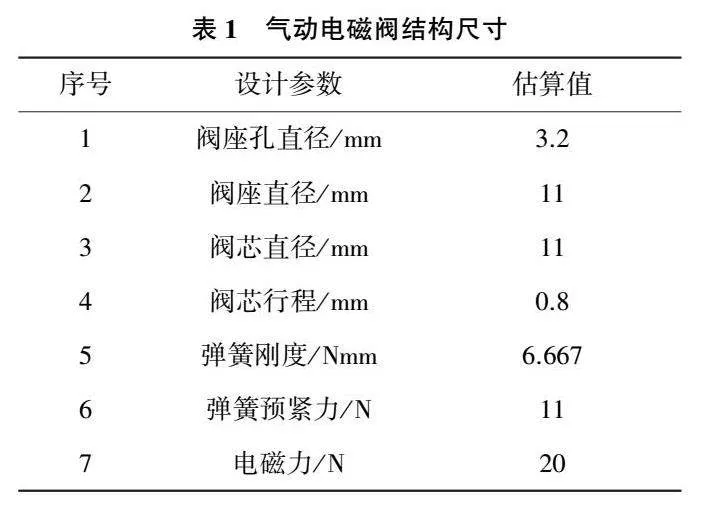
根據(jù)流量要求,通過(guò)仿真計(jì)算,確定氣動(dòng)電磁閥的基本結(jié)構(gòu)尺寸如表1所示。
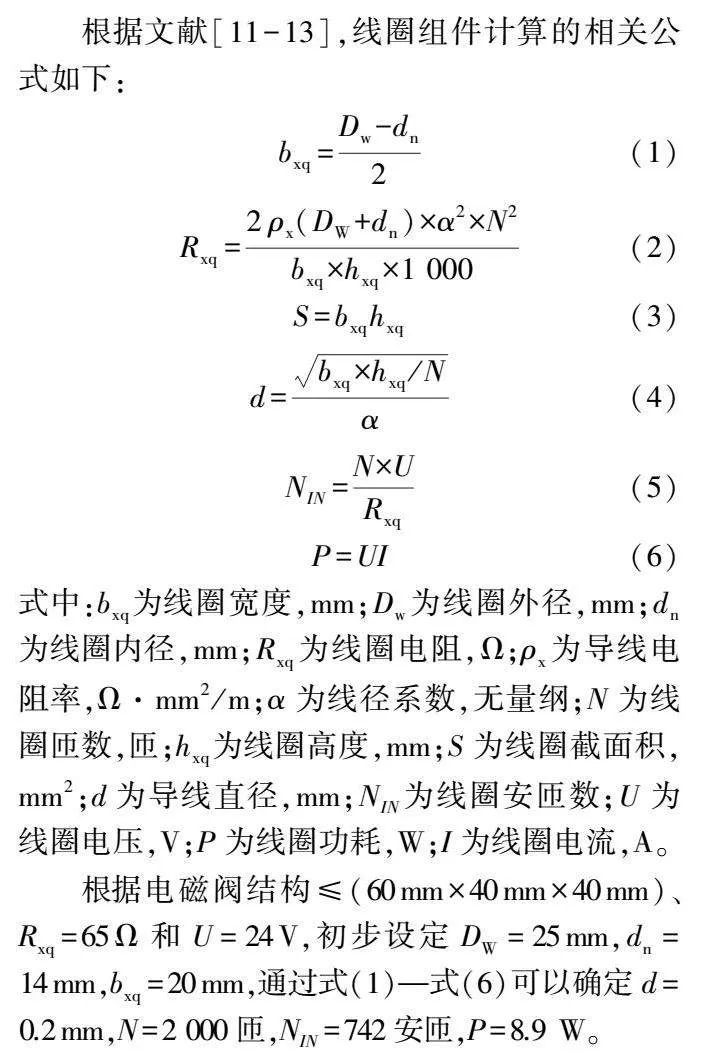
根據(jù)電磁閥結(jié)構(gòu)≤(60mm×40mm×40mm)、Rxq=65Ω和U=24V,初步設(shè)定DW=25mm,dn=14mm,bxq=20mm,通過(guò)式(1)—式(6)可以確定d=0.2mm,N=2 000匝,NIN=742安匝,P=8.9W。
1.3氣動(dòng)電磁閥密封結(jié)構(gòu)設(shè)計(jì)
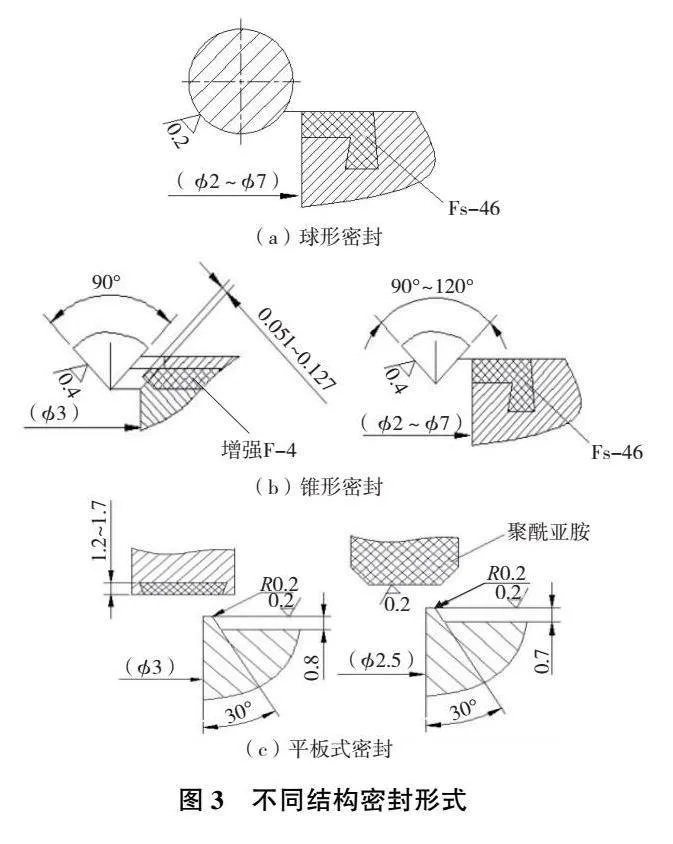
常見的閥口密封形式有球閥式、錐閥式和平板閥式,其結(jié)構(gòu)示意圖如圖3所示。
球閥密封結(jié)構(gòu)雖然簡(jiǎn)單,但鋼球會(huì)轉(zhuǎn)動(dòng),影響密封性,工作中也會(huì)產(chǎn)生振動(dòng)和噪聲;錐形密封結(jié)構(gòu)易對(duì)中且密封性、重復(fù)性好,閥芯有導(dǎo)向面,但密封面與閥芯同軸度要求較高;平板式密封結(jié)構(gòu)易于加工,浮動(dòng)密封性好,密封性能受加工精度影響較小。從密封效果來(lái)看,本研究選擇平板式密封。
密封副材料分為金屬-金屬和金屬-非金屬兩種。為了達(dá)到良好的密封效果,一般選用金屬-非金屬密封。金屬材料閥座選用合金鋼,閥芯選用金屬材料鍍橡膠的形式,橡膠材料一般選擇F46,密封副結(jié)構(gòu)形式選用浮動(dòng)的環(huán)帶端面密封,用彈簧預(yù)緊力提供密封所需的比壓,從而滿足低泄漏要求。
1.4電磁鐵電磁力仿真驗(yàn)證
1)根據(jù)1.2中估算的電磁鐵結(jié)構(gòu)尺寸,在Maxwell中建立電磁鐵的仿真模型如圖4所示。由于氣動(dòng)電磁閥為軸對(duì)稱模型,因此建立其一半模型,減小計(jì)算量,提高計(jì)算效率[14]。
2)定義端蓋、閥芯、外殼材料為DT4,線圈材料為Cu。
3)設(shè)置電磁鐵的邊界條件(結(jié)合參考文獻(xiàn),設(shè)置邊界條件為氣球邊界條件[15])。
4)給電磁鐵設(shè)置激勵(lì)源(線圈安匝數(shù)為742安匝),選擇閥芯,將電磁力和電感設(shè)置為求解對(duì)象,并在求解器中定義閥芯運(yùn)動(dòng)行程為0.8mm。
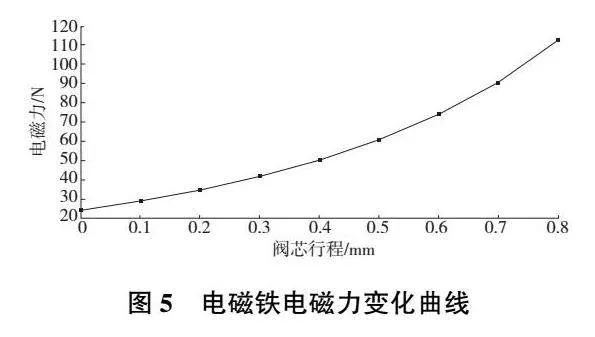
通過(guò)靜態(tài)特性仿真,得到電磁鐵的電磁力變化曲線如圖5所示。
從圖5的仿真結(jié)果中可以看出,電磁鐵的啟動(dòng)電磁力為23.79N,與通過(guò)AMESim仿真結(jié)果接近,能夠保證氣動(dòng)電磁閥可靠打開和關(guān)閉。
2氣動(dòng)電磁閥動(dòng)態(tài)特性仿真研究
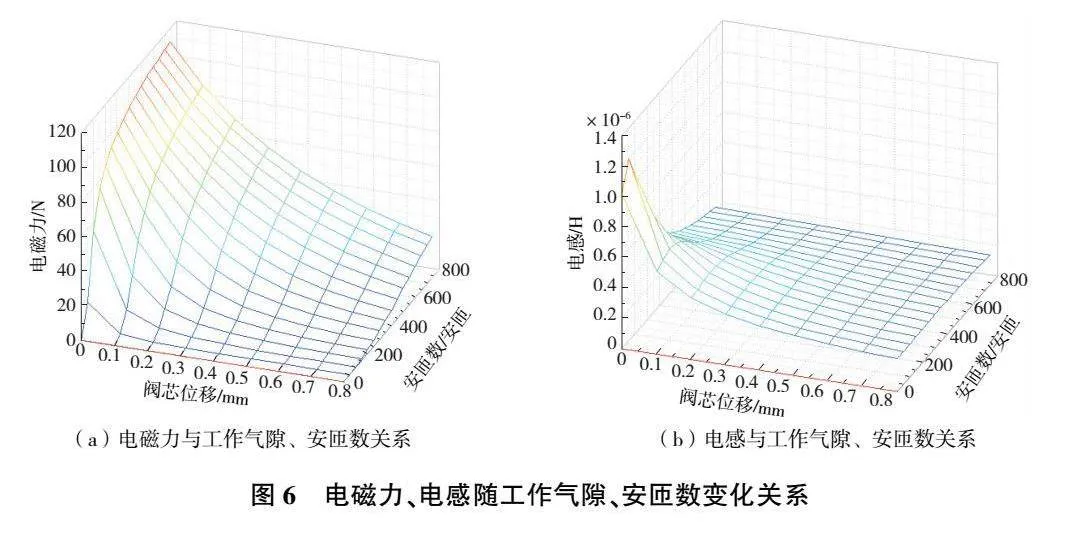
為了得到電磁閥的動(dòng)態(tài)特性變化曲線,需要聯(lián)立AMESim和Ansoft進(jìn)行聯(lián)合仿真,以得到電磁鐵的電磁力和電感隨氣隙和安匝數(shù)的變化情況。在Ansoft中設(shè)置工作氣隙從0mm~0.8mm變化,每0.1mm取個(gè)點(diǎn)計(jì)算一次,安匝數(shù)從0~742安匝,每50安匝取個(gè)點(diǎn)計(jì)算一次,這樣共需進(jìn)行9×16次運(yùn)算。圖6為電磁力和電感隨工作氣隙和安匝數(shù)變化情況。
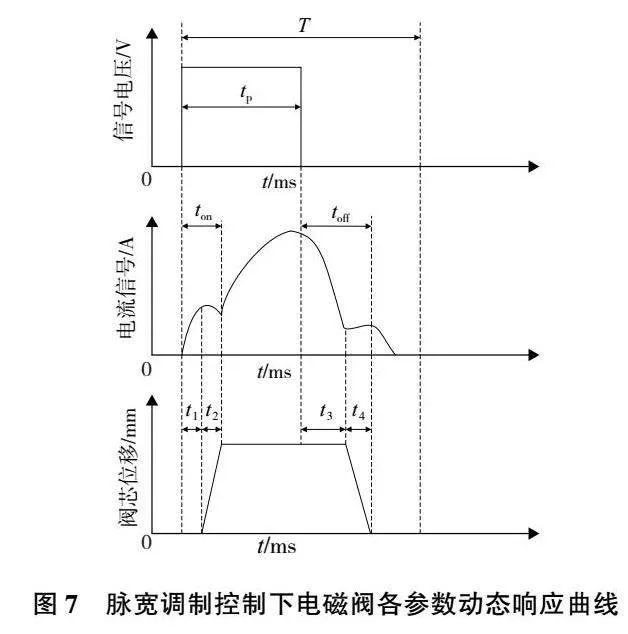
將圖6中電磁力和電感數(shù)據(jù),利用AMESim數(shù)據(jù)表格導(dǎo)入到電磁鐵模型中,氣動(dòng)電磁閥AMESim仿真模型如圖2所示。氣動(dòng)電磁閥的動(dòng)態(tài)特性隨PWM控制信號(hào)變化情況如圖7所示。
2.1單電壓作用下電磁閥動(dòng)態(tài)特性仿真
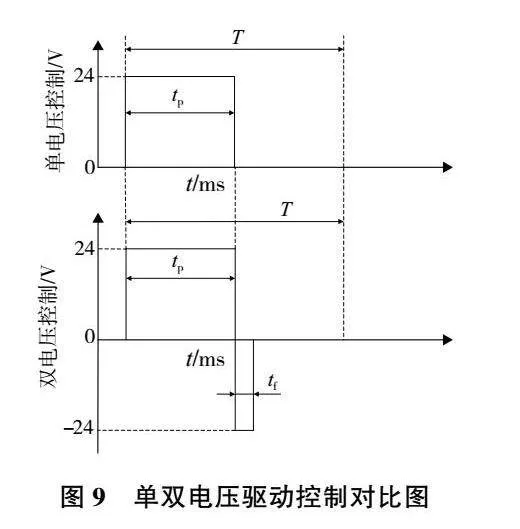
圖7中:T為PWM脈寬調(diào)制周期;tp為PWM脈沖寬度;ton為電磁鐵打開時(shí)間;toff為電磁鐵關(guān)閉時(shí)間;t1為電磁鐵通電閥芯觸動(dòng)時(shí)間;t2為閥芯運(yùn)動(dòng)時(shí)間;t3為閥芯關(guān)閉滯后時(shí)間;t4為閥芯關(guān)閉運(yùn)動(dòng)時(shí)間。電磁閥一旦確定,ton和toff也隨之確定,因此可以算出電磁閥的極限采樣周期Tmin。
如果規(guī)定PWM的極限載波頻率為fmax,則
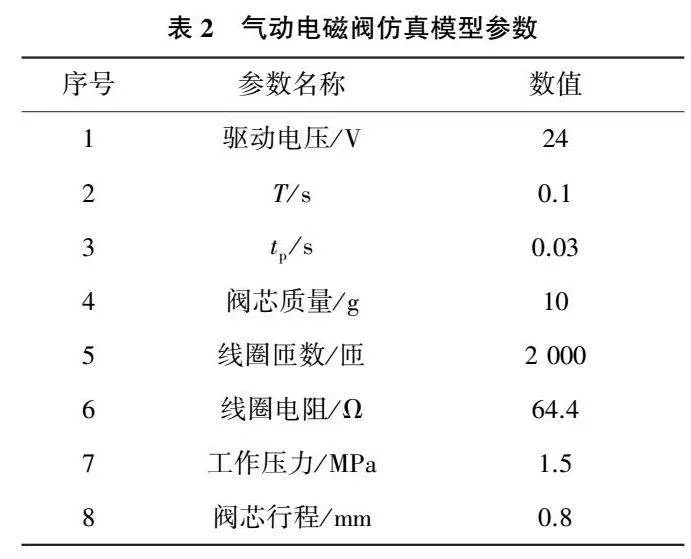
氣動(dòng)電磁閥仿真模型參數(shù)設(shè)置如表2所示。
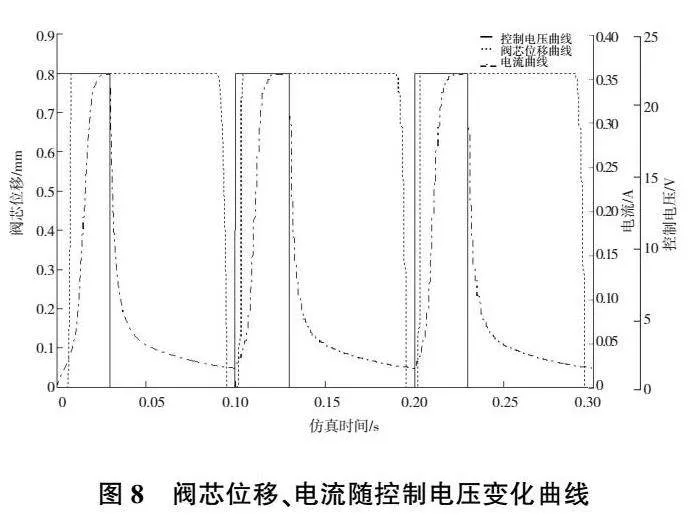
當(dāng)驅(qū)動(dòng)頻率為10Hz時(shí),得到電磁閥控制電壓、電流和閥芯位移變化曲線如圖8所示。
從圖8的仿真結(jié)果中可以看出,電磁閥的ton=5.2ms,toff=66ms。通過(guò)式(7)和式(8)可以計(jì)算出fmax=13.5Hz。在電磁閥設(shè)計(jì)時(shí)一般會(huì)考慮最高頻率;如果驅(qū)動(dòng)頻率過(guò)高,將導(dǎo)致電磁閥不能實(shí)現(xiàn)完全啟閉,在實(shí)際設(shè)計(jì)中由于電路中存在死區(qū),因此最大頻率可能會(huì)低一點(diǎn)。通過(guò)仿真分析,氣動(dòng)電磁閥的驅(qū)動(dòng)頻率為10Hz。從仿真結(jié)果中可以看出toff=66ms遠(yuǎn)大于技術(shù)指標(biāo)中響應(yīng)時(shí)間≤10ms的要求,因此需要分析原因并采取優(yōu)化措施降低電磁閥的關(guān)閉時(shí)間。
在電磁閥研究中,降低關(guān)閉時(shí)間的主要措施有:
1)增大彈簧反作用力;2)采用低剩磁Br及低矯頑力Hc的軟磁合金材料;3)采用高電阻率的軟磁合金;
4)避免電磁線圈短路,或裝有短接線圈;
5)減小閥芯質(zhì)量;
6)減小閥芯負(fù)載和摩擦因數(shù)。
上述措施對(duì)降低電磁閥的關(guān)閉時(shí)間有一定作用,但要將關(guān)閉時(shí)間從66ms降低到10ms幾乎不可能。原因是電磁閥在關(guān)閉時(shí)線圈中的電壓是緩慢變化的,其磁通量也是緩慢變化的,從而在閥芯中引起渦流,阻礙了閥芯的運(yùn)動(dòng),因此要加快閥芯的關(guān)閉速度必須加快線圈中電壓的釋放速度。本文通過(guò)采用雙電壓控制方式,在電磁閥關(guān)閉時(shí)增加-24V反向電壓,將關(guān)閉電壓迅速降低至0,從而降低電磁閥的關(guān)閉滯后時(shí)間,提高響應(yīng)速度。
2.2雙電壓作用下電磁閥動(dòng)態(tài)特性仿真
與單電壓控制方式不同,雙電壓在電磁閥關(guān)閉時(shí)需要增加一個(gè)反向電壓,將電磁閥的關(guān)閉電壓迅速降為0,但反向電壓控制時(shí)間不能過(guò)長(zhǎng)也不能過(guò)短。過(guò)長(zhǎng)將影響電磁閥下一周期的打開時(shí)間,過(guò)短將無(wú)法起到降低關(guān)閉時(shí)間的效果。雙電壓驅(qū)動(dòng)控制如圖9所示,T=0.1s,tp=0.03s。
選取-24V控制時(shí)間tf從0.001s~0.022s變化,每0.001s取個(gè)點(diǎn)進(jìn)行參數(shù)化仿真,以0.3s內(nèi)閥芯能夠?qū)崿F(xiàn)3次完全啟閉作為判斷依據(jù),確定-24V的控制時(shí)間,其中具有典型過(guò)程的仿真結(jié)果如圖10所示。
從圖10的仿真結(jié)果中可以看出:當(dāng)-24V控制時(shí)間較短時(shí),如tf=0.001s時(shí),單電壓控制與雙電壓控制閥芯位移變化曲線基本相同,原因是負(fù)電壓控制時(shí)間較短,很難將電磁閥關(guān)閉時(shí)的電壓迅速降為0,當(dāng)24V電壓在0.03s關(guān)閉時(shí)仍需較長(zhǎng)時(shí)間閥芯才能復(fù)位;當(dāng)-24V控制時(shí)間較長(zhǎng)時(shí),如tf=0.022s時(shí),閥芯會(huì)在關(guān)閉后重新打開,原因是負(fù)電壓控制時(shí)間越長(zhǎng),線圈電壓在降為0后,又繼續(xù)降低為負(fù)值,這樣閥芯在壓降差的作用下又重新吸合;當(dāng)-24V控制時(shí)間適宜,如tf=0.008s和tf=0.015s,負(fù)電壓會(huì)在短時(shí)間內(nèi)將關(guān)閉電壓降為0,使閥芯實(shí)現(xiàn)快速關(guān)閉。從仿真結(jié)果中可以看出,閥芯在0.03s開始運(yùn)動(dòng),在0.034s運(yùn)動(dòng)到位,關(guān)閉時(shí)間由原來(lái)單電壓控制的66ms降低至雙電壓控制的4.5ms,滿足技術(shù)指標(biāo)中響應(yīng)時(shí)間要求。
3試驗(yàn)研究
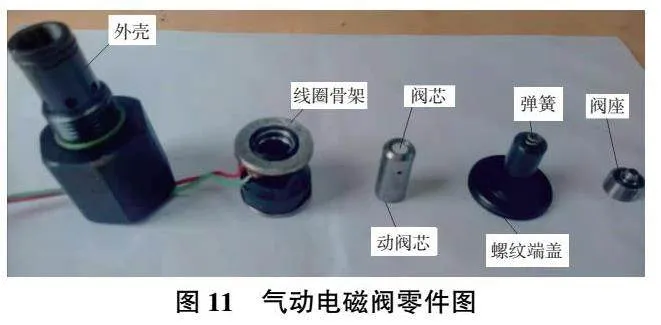
氣動(dòng)電磁閥零件如圖11所示。
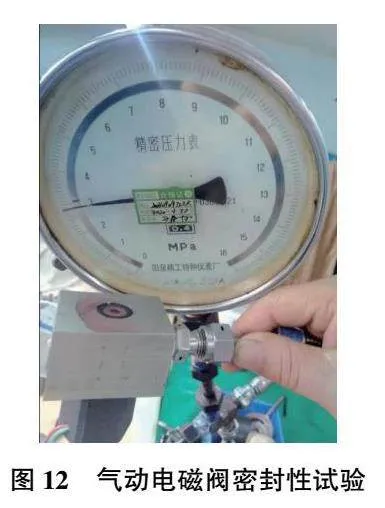
3.1氣密性試驗(yàn)
氣動(dòng)電磁閥密封性試驗(yàn)如圖12所示。
從圖12的密封性試驗(yàn)可以看出,在氣動(dòng)高速開關(guān)閥的入口通入3MPa的氮?dú)猓⒃陂y的出口涂上紅油,出口處沒(méi)有氣泡產(chǎn)生,說(shuō)明沒(méi)有發(fā)生泄漏,氣密性良好,滿足技術(shù)指標(biāo)中在1.5MPa壓力下泄漏量<0.6mL/min的要求。
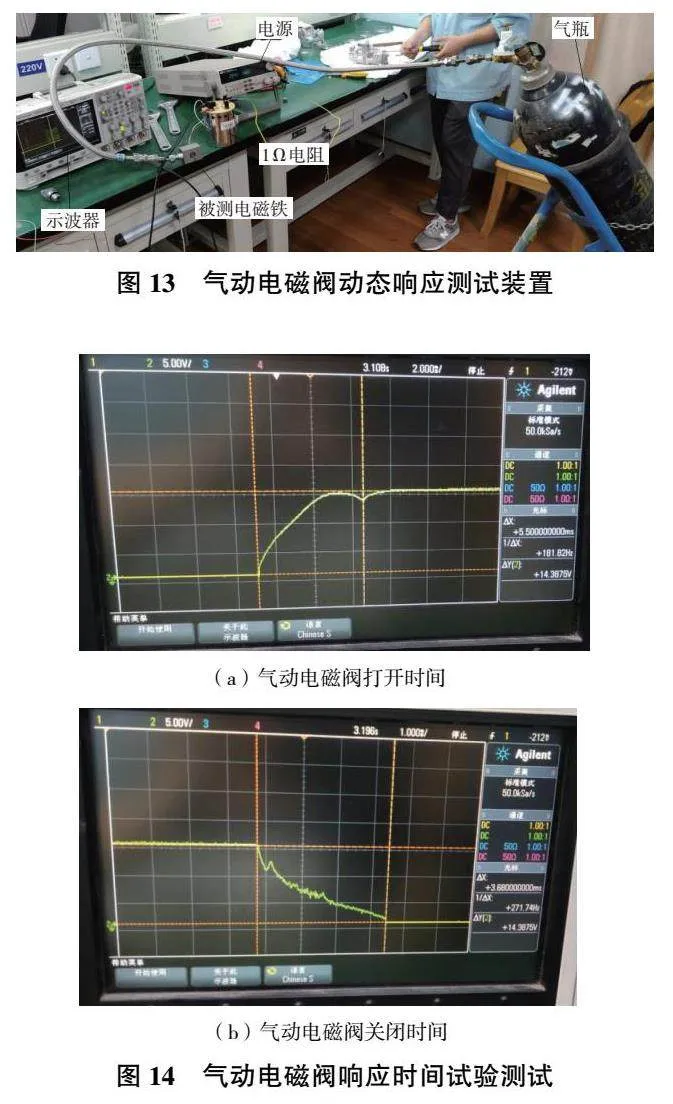
3.2動(dòng)態(tài)響應(yīng)時(shí)間試驗(yàn)
氣動(dòng)電磁閥動(dòng)態(tài)響應(yīng)測(cè)試裝置如圖13所示,主要由氣瓶、電源、1Ω電阻、被測(cè)電磁鐵和示波器組成。測(cè)試啟閉時(shí)間的工藝方法是:打開氣瓶給電磁閥通入工作壓力氣體;將氣動(dòng)電磁閥與1Ω電阻串聯(lián),將示波器并聯(lián)在1Ω電阻上,連接直流穩(wěn)壓電源,檢查線路連接正確后將直流穩(wěn)壓電源電壓預(yù)置為(24±1)V,將示波器掃描周期調(diào)至500ms,以5s為周期往復(fù)開關(guān)電源,用示波器記錄下電磁鐵波形;對(duì)照?qǐng)D7記錄下電磁鐵的打開時(shí)間ton和關(guān)閉時(shí)間toff。測(cè)試的試驗(yàn)結(jié)果如圖14所示。
從圖14的試驗(yàn)結(jié)果中可以看出,氣動(dòng)電磁閥的打開時(shí)間為5.50ms,關(guān)閉時(shí)間為3.68ms,響應(yīng)時(shí)間滿足技術(shù)指標(biāo)≤10ms的技術(shù)要求,與仿真結(jié)果中打開時(shí)間5.2ms、關(guān)閉時(shí)間4.5ms基本一致。
4結(jié)語(yǔ)
本論文根據(jù)氣動(dòng)電磁閥技術(shù)指標(biāo)要求進(jìn)行設(shè)計(jì)及動(dòng)態(tài)特性仿真研究:
1)通過(guò)建模仿真確定了電磁閥的基本結(jié)構(gòu),設(shè)計(jì)了軟硬接觸方式,保證了電磁閥的密封可靠性;
2)基于雙電壓控制方式將電磁閥的關(guān)閉時(shí)間由原來(lái)單電壓控制的66ms降低至雙電壓控制的4.5ms,滿足技術(shù)指標(biāo)要求;
3)通過(guò)對(duì)氣動(dòng)電磁閥進(jìn)行密封性和動(dòng)態(tài)響應(yīng)時(shí)間測(cè)試,與仿真結(jié)果接近,均符合技術(shù)指標(biāo)要求。
參考文獻(xiàn):
[1] 許家誠(chéng). 氣缸柔性體動(dòng)力學(xué)及其仿真分析[D]. 廣州:華南理工大學(xué),2018.
[2] 李葆. 氣動(dòng)沖孔裝置在汽車沖壓件生產(chǎn)中的應(yīng)用[J]. 模具制造,2015,15(6):28-29.
[3] 肖雅馨. 氣動(dòng)電磁閥智能在線故障檢測(cè)系統(tǒng)的研究[D]. 杭州:浙江大學(xué),2020.
[4] 刁勇,陸永華,龔新宇. 氣動(dòng)電磁閥響應(yīng)特性參數(shù)的綜合測(cè)試系統(tǒng)研究[J]. 機(jī)械制造與自動(dòng)化,2019,48(1):156-159.
[5] 吳鵬飛,焦磊. 氣動(dòng)電磁閥不同材料閥芯處密封環(huán)的有限元分析[J]. 液壓氣動(dòng)與密封,2018,38(1):35-38.
[6] 侯樹剛,李鐵成,舒尚文,等. 空氣錘及空氣鉆頭在普光氣田的應(yīng)用[J]. 天然氣工業(yè),2007,27(9):65-67,134-135.
[7] KAWASE Y,OHDACHI Y. Dynamic analysis of automotive solenoid valve using finite element method[J]. IEEE Transactions on Magnetics,1991,27(5):3939-3942.
[8] 沈赤兵,陳新華,陳啟智. 電動(dòng)氣閥動(dòng)態(tài)特性及反力因素的影響[J]. 推進(jìn)技術(shù),1996,17(6):64-68.
[9] XIANG Z,LIU H,TAO G L,et al. Development of an ε-type actuator for enhancing high-speed electro-pneumatic ejector valve performance[J]. Journal of Zhejiang University:Science A,2008,9(11):1552-1559.
[10] 戴佳,黃敏超,余勇,等. 電磁閥動(dòng)態(tài)響應(yīng)特性仿真研究[J]. 火箭推進(jìn),2007,33(1):40-48.
[11] 高強(qiáng),朱玉川,羅樟,等. 高速開關(guān)閥的復(fù)合PWM控制策略分析與優(yōu)化[J]. 北京航空航天大學(xué)學(xué)報(bào),2019,45(6):1129-1136.
[12] 柴瑋鋒,廖瑤瑤,廉自生,等. 礦用電磁閥動(dòng)靜態(tài)特性分析[J]. 液壓與氣動(dòng),2020(8):42-48.
[13] 唐兵,劉宇輝,司國(guó)雷,等. 先導(dǎo)式大流量高速開關(guān)閥的關(guān)鍵技術(shù)研究[J]. 液壓與氣動(dòng),2018(6):76-83.
[14] 劉玉萍,廉自生. 本質(zhì)安全型電磁鐵的特性仿真[J]. 煤礦機(jī)械,2011,32(5):50-53.
[15] 張榛. 電磁閥動(dòng)態(tài)響應(yīng)特性的有限元仿真與優(yōu)化設(shè)計(jì)[J]. 空間控制技術(shù)與應(yīng)用,2008,34(5):53-56.
收稿日期:20230329
基金項(xiàng)目:國(guó)家重點(diǎn)研發(fā)計(jì)劃項(xiàng)目(2019YFB2005100)
第一作者簡(jiǎn)介:司國(guó)雷(1978—),男,四川成都人,研究員,博士,研究方向?yàn)槲⑿⌒鸵簤涸O(shè)計(jì),421976004@qq.com。
DOI:10.19344/j.cnki.issn1671-5276.2024.06.022

- 機(jī)械制造與自動(dòng)化的其它文章
- 基于增強(qiáng)稀疏分解的發(fā)動(dòng)機(jī)葉片監(jiān)測(cè)振動(dòng)辨識(shí)
- 一種機(jī)場(chǎng)異物探測(cè)的伺服轉(zhuǎn)臺(tái)設(shè)計(jì)
- 基于T-S模糊故障樹的液壓旋挖鉆機(jī)緩沖平衡閥故障診斷方法
- IDC安防巡檢機(jī)器人網(wǎng)絡(luò)監(jiān)控告警系統(tǒng)設(shè)計(jì)
- 基于力矩負(fù)反饋的柔性關(guān)節(jié)機(jī)器人自適應(yīng)分層滑模控制方法
- 基于PID參數(shù)優(yōu)化的機(jī)械臂末端異常振動(dòng)控制