基于改進(jìn)UNet++的高分辨率遙感影像道路提取方法
2024-12-09 00:00:00魏向祎孔令然
中國新技術(shù)新產(chǎn)品
2024年17期

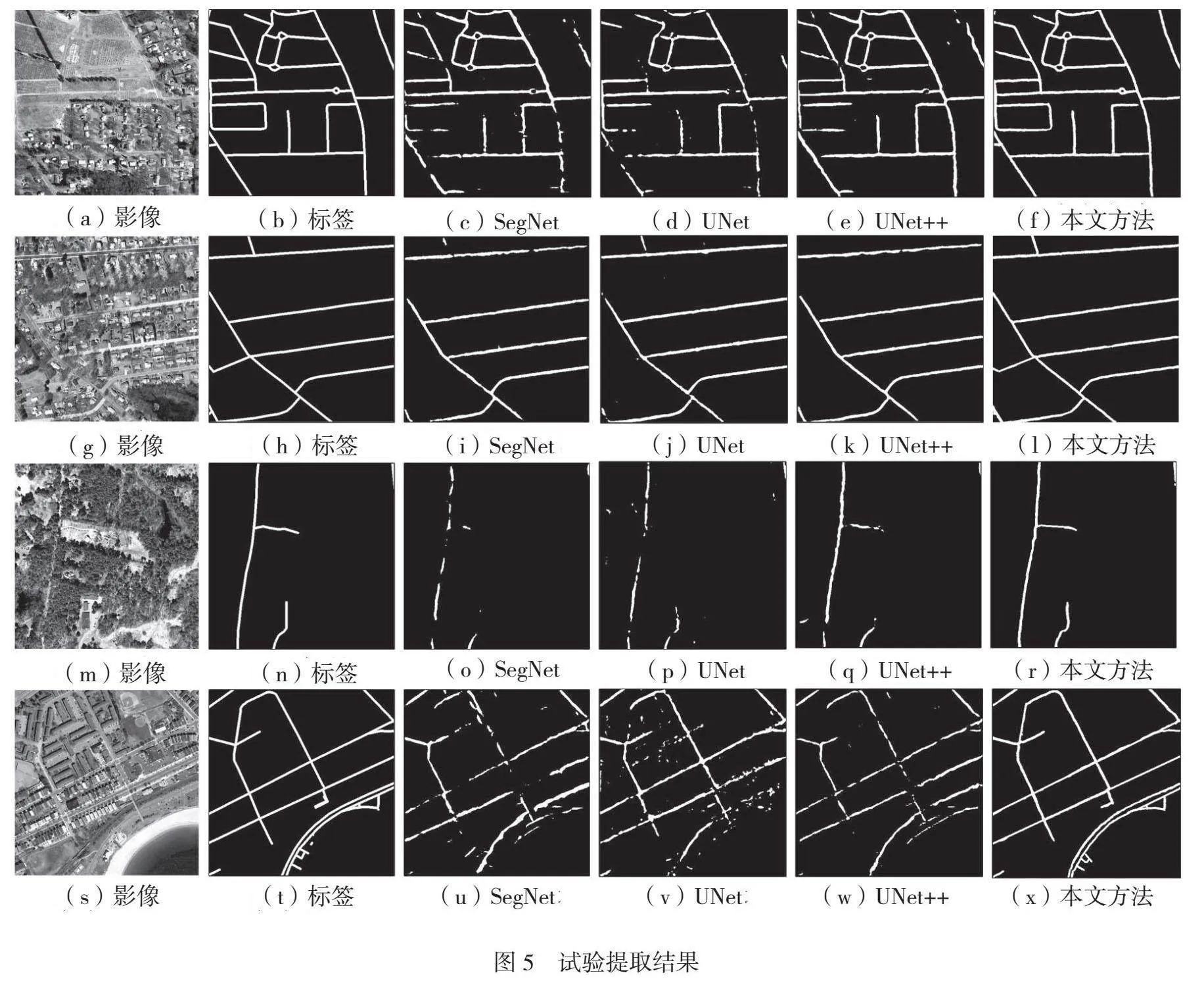
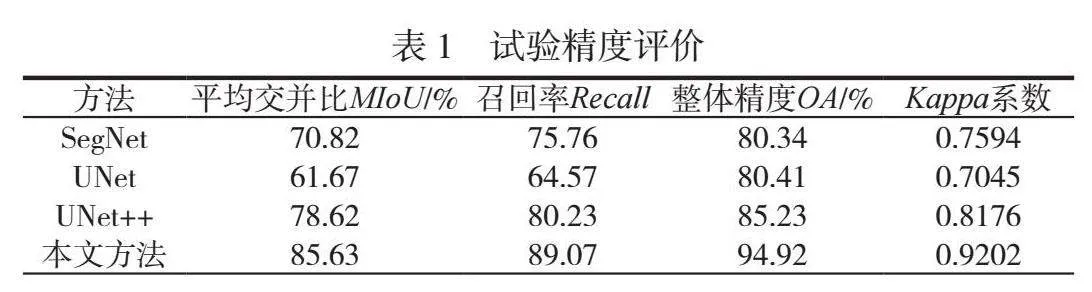

摘 要:為了解決高分辨率遙感影像中道路提取的質(zhì)量和效率問題,本文提出了一種融合CBAM的改進(jìn)UNet++的道路提取方法。在原始UNet++網(wǎng)絡(luò)中引用CBAM,對損失函數(shù)進(jìn)行改進(jìn),并使用一種新的聯(lián)合損失函數(shù)。試驗結(jié)果表明,與U-Net、SegNet和UNet++網(wǎng)絡(luò)相比,本文方法在IoU、Recall、OA和Kappa方面均是最優(yōu)秀的。其中,OA和Kappa分別為94.92%和0.9202。綜上所述,本文方法能夠有效進(jìn)行高分辨率遙感影像道路提取,具有一定的泛化能力,能夠為道路的防護(hù)和規(guī)劃提供支持。
關(guān)鍵詞:道路提取;遙感影像;U-Net++;CBAM:損失函數(shù)
中圖分類號:P 23" " " 文獻(xiàn)標(biāo)志碼:A
高分辨率遙感影像被廣泛應(yīng)用于生活發(fā)展的各個方面,例如災(zāi)害監(jiān)測、導(dǎo)航定位、道路矢量化和城市規(guī)劃等[1]。其中,道路是重要的地理信息,在生活發(fā)展中具有著不可替代的作用。
基于高分辨率遙感影像的道路提取方法有多種,其中四種方法最為普遍,分別為基于道路形狀、基于道路紋理、基于圖像灰度閾值和利用深度學(xué)習(xí)進(jìn)行提取。目前,UNet++神經(jīng)網(wǎng)絡(luò)被提出,后被廣大學(xué)者所應(yīng)用[2-3]。BOUSIAS等利用UNet++網(wǎng)絡(luò)對高分辨率遙感影像進(jìn)行變化檢測任務(wù),訓(xùn)練和評價了UNet和UNet++神經(jīng)網(wǎng)絡(luò)。雖然UNet++網(wǎng)絡(luò)在高分辨率遙感影像的變化檢測任務(wù)中具有較好的性能,但是面對高分辨率遙感影像復(fù)雜的特征信息時,仍然存在邊緣細(xì)節(jié)提取不完全、提取結(jié)果不連續(xù)等問題。
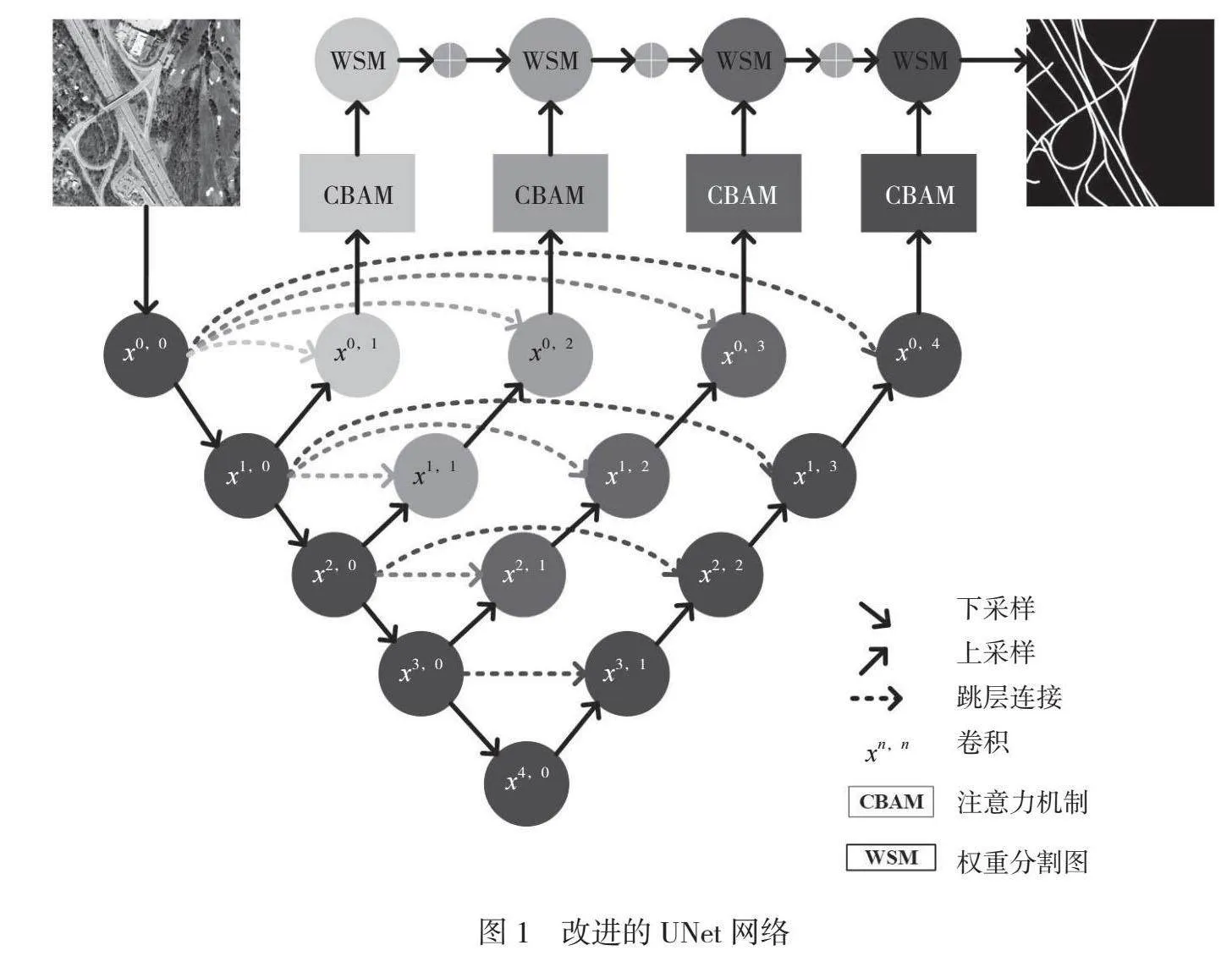
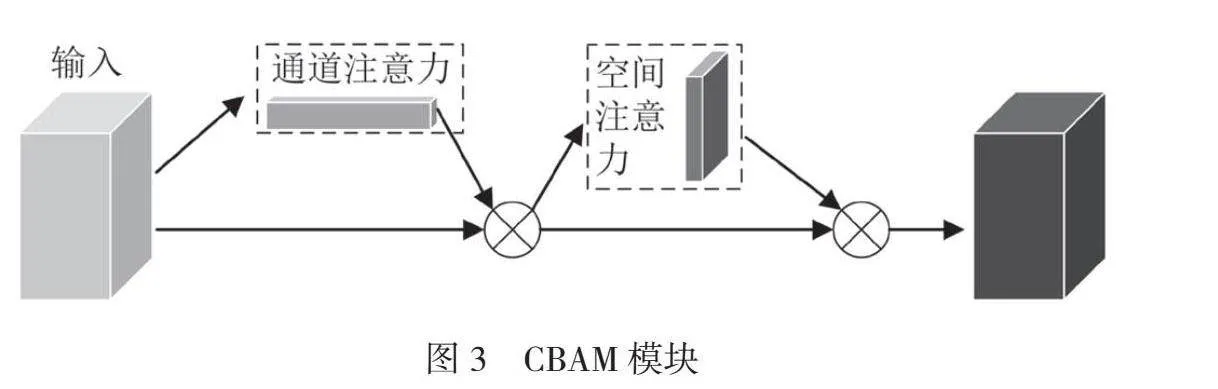
針對提取不完整和提取不連續(xù)等問題,本文在UNet++的基礎(chǔ)上進(jìn)行改進(jìn),提出一種能夠有效提取高分辨率遙感影像道路的方法,即利用多層次融合結(jié)構(gòu)提取深層和淺層特征并結(jié)合CBAM模塊,增強(qiáng)對道路特征信息的辨識能力,并改進(jìn)損失函數(shù),以提高遙感影像的道路提取精度。……
登錄APP查看全文